
永磁同步伺服电机的智能控制
2017-03-17 22:24梁赛沈子龙
科学与财富 2017年1期
梁赛 沈子龙
摘 要:永磁同步电机因为其优越的性能正得到越来越广泛的应用, 并在高性能伺服系统中逐步取代直流电机和异步电机。伺服系统对电机控制性能有很高的要求, 本文对伺服系统中永磁同步电机控制的智能控制问题进行了介绍。
关键词:永磁同步;伺服电机;控制
引言
发展和提高永磁同步电机的制造水平, 开发相应的高性能控制器产品, 提高资源的利用率和附加产值应该是我国未来的一个发展方向。
一、闭环调节器的控制
永磁同步电机的数学模型与异步电机相比,简单了不少,但仍具有非线性,强耦合,多变量等特点,寻求比普通PID 调节器更优良的控制策略是提高交流伺服系统性能的有效途径之一。
(1) 基于现代控制理论的控制策略
基于现代控制理论的电机控制方法有许多,典型的如滑模变结构控制,自适应控制等。其中,自适应控制能够抑制系统运行时参数变化的影响,获得有用的模型信息,使控制器的控制参数能够得到自动调整。但这些方法均存在两个问题,一是模型复杂,运算繁琐; 二是校正和辨识的时间较长,实时性不佳。
此外,还有许多现代控制理论被用到转速控制器设计中,包括自适应逆推、反馈线性化、鲁棒控制等。
( 2) 基于智能思想的控制策略
典型的智能控制方法如模糊控制是模糊数学与控制理论相结合的产物。现实中,有些被控对象是难以建立精确的数学模型的,这时,使用模糊控制的方法是一种非常不错的选择。当前,在永磁同步电机的控制方面的,模糊控制的应用与研究已取得了许多成果,在电机的控制领域,仍有不少与模糊控制相结合的控制方法出现。
神经网络控制也是一种基于智能思想的控制策略,其并行处理,分布存储,自组织,自学习及神经计算能力,使其成为一种很有前途的控制方法,目前已有不少文献对此进行研究。
二、电机自身的控制
交流伺服系统中对电机自身的控制方法主要有: 压频控制、磁场定向控制,解耦控制与直接转矩控制。
( 1) 压频控制
压频控制是一种开环控制方法,不需要电机位置、速度等反馈信息,其控制方法简单,无复杂的控制算法,方便实现。缺点是无法获取电机的电磁转矩和工作状态。因此只适用于一般的水泵和风机等场合。
( 2) 矢量控制
矢量控制是德国西门子公司的F.Blashcke 在七十年代提出的。该方法的主要思想是将三相磁链矢量、电压矢量、电流矢量,通过坐标变换为两相矢量。目前,矢量控制的方法在理论上与应用上都十分成熟,具体包括: 最大转矩与电流比控制、id控制、弱磁控制、最大输出功率控制、cosφ = 1 控制、恒磁链控制等。
在所有的控制方法中,使id = 0 的控制方式最为简单,它能够将三相电流转变为两相dq 电流,然后对dq 电流分别进行控制,使得只存在q 轴电流,进而实现永磁同步电机的稳态解耦。这里的q 轴电流就相当于直流电机的控制回路的转子电枢电流。这样,对永磁同步电机的控制就相当于对直流电机的控制。这种控制方法结构相对简单,计算量小。缺点是当电机负载增加时,电机的功率因数会降低,而定子电压则会升高,所以要让电机正常运行,其逆变器必需要有足够的容量。
(3) 解耦控制
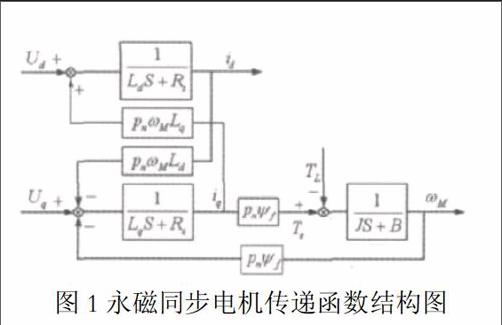
对永磁同步电机的电压方程进行相应的拉氏变换,用结构图表示其传递函数见图1所示。从图中可以明显的看出,永磁同步电机的dq 轴分量相互耦合,不能实现Ud和Uq对id和ωM分别的控制,因此,要实现系统高性能控制的关键在于解耦控制。
矢量控制可以实现永磁同步电机的稳态解耦,前提是定子磁链必须到达稳定状态,但动态过程仍相互耦合,其动态响应不能令人满意。
对永磁同步电机的控制而言,已有许多解耦控制方法出现: 如将永磁同步电机解耦成二阶线性转速子系统和一阶线性磁链子系统,进而实现转速和磁链动态解耦控制; 针对dq 坐标系下提出的反馈解耦控制方案,在负载转矩波动下,对指令速度有良好的转速跟踪性能; 还可以对永磁同步电机数学模型进行可逆性求解,得出逆系统进而构造相应神经网络,实现永磁同步电机转速和定子磁链的动态解耦。
三、信号反馈技术
通常要获得更高性能的控制效果,交流伺服系统需要运行于闭环控制状态下,因而需要获得电机转子的位置、速度信息等,一般的方法是在电机转轴上安装光电编码器或测速电机等。但装上传感器,会出现许多问题: 伺服产品成本增加; 由于同心度问题,转子位置出现偏差; 连接线缆增加,使得系统容易受到干扰,系统可靠性降低; 电机的体积增大; 易受到振动、湿度和温度等条件的影响。
为了克服这些缺陷,无位置/速度传感器伺服系统的研究成了当前的热点,根据容易测出的定子电压、定子电流等物理量,通过相应的算法,估算出当前转子的位置与转速信息。无速度传感器控制策略大体上可分为3 类:
一类是根据永磁同步电机的数据模型来估算的方法,如通过获得定子电流和电压后进行直接计算的方法; 通过比较电压计算值与实测值得到转子位置的电感变化估算方法; 反电动势积分法; 扩展反电动势法等。
另一类是基于各种观测器模型的闭环算法,如模型参考自适应、降阶状态观测器、扩展卡尔曼滤波器、全阶状态观测器、滑模观测器等。这类方法是通过永磁同步电机的电压方程推算出感应的反动势,再从中提取出位置信号,适用于高速运行状态下的位置与速度估算,当电机转速较低时,反电动势信噪比小,不能准确估算转子和位置。
还有一类是以基于电机理想特性的算法,如高频信号注入法和低频信号注入法。高频信号注入法不依赖于任何电机的参数和运行的情况,因而可以工作于低速运行状态,但电机必需是凸极性的。而低频信号注入法要求电机不能具有凸极效应,而且电机转子不能有较大的转动惯量,否则检测精度会变差。
四、结束语
本文给出了永磁同步电机运行的两种基本模式,并将其控制策略归纳为三个方面。针对这三个方面,分别进行了综述性的介绍。为了满足各种场合应用的需求,需要将各种控制方法相互渗透,以提高当前伺服系统的整体性能。永磁同步电机控制系统作为一个多学科交叉的研究领域,其研究方向还可以从其它方面更进一步: ① 优化的直接转矩控制技术; ② 定子电流死区补偿技术; ③ 无位置/速度传感器控制技术; ④ 多种方法相结合的闭环调节器控制策略的研究; ⑤ 电机转子初始位置检测等。
参考文献:
[1]张锐,白连平.永磁交流伺服电机控制系统的研究[J].电气技术.2011(03)
[2]谢玉春,杨贵杰,崔乃政.高性能交流伺服电机系统控制策略综述[J].伺服控制.2011(01)
[3]辛小南,贺莉,王宏洲.永磁同步电动机交流伺服系统控制策略综述[J].微特电机.2010(02)
[4]葛继科,邱玉辉,吴春明,蒲国林.遗传算法研究综述[J].计算机应用研究.2008(10)
[5]陳鹏展.交流伺服系统控制参数自整定策略研究[D].华中科技大学2010
猜你喜欢
微特电机(2020年11期)2020-12-30
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
电子制作(2016年1期)2016-11-07
科技视界(2016年21期)2016-10-17
商(2016年27期)2016-10-17
大众理财顾问(2016年9期)2016-10-11
科技视界(2016年20期)2016-09-29
大众理财顾问(2016年8期)2016-09-28
湖北电力(2016年8期)2016-05-09
