
基于人工势场的旋翼飞行器航迹规划方法
2017-03-15 02:45罗宁曦芦利斌谭力宁李文豪
指挥控制与仿真 2017年1期
刘 畅,罗宁曦,芦利斌,谭力宁,李文豪
(火箭军工程大学,陕西 西安 710025)
基于人工势场的旋翼飞行器航迹规划方法
刘 畅,罗宁曦,芦利斌,谭力宁,李文豪
(火箭军工程大学,陕西 西安 710025)
人工势场法是局部路径规划常用的一种方法。针对基于人工势场的传统路径规划算法没有充分考虑旋翼飞行器运动特性的问题,通过改进人工势场法提出了一种飞行器侧向机动轨迹设计方法——二次引力势场法。该方法以预规划航迹为约束,通过动态选定给定航迹点作为引力源引导飞行器以一定速度跟踪给定的航迹以完成任务。仿真结果表明在考虑旋翼飞行器自身特性约束的情况下,提出的方案可以有效地完成航迹规划任务。
航迹规划;人工势场法;旋翼飞行器
作为飞行器任务规划系统的核心之一,航迹规划是一门伴随现代信息技术发展起来的高新技术。准确地说,航迹规划指在具有“威胁源”的环境中,按照一定的评价标准(如距离、时间、能量等),寻找一条从起始状态到目标状态的无“碰撞”路径,以保证圆满完成飞行任务[1]。近年来,人工势场算法因其机理简单、模型结构简明、环境描述快捷等优点在机器人的路径规划中得到了广泛运用,但其具有的目标不可达[2-5]、徘徊抖动[3]、动态规划能力不足[6]等缺点也限制了其应用范围。针对这些问题,学者们已经提出了许多解决方法,如沿墙走、模拟退火算法、随机逃走法和动态步长折半法等[11]。但总体来看,此类路径规划算法仍然缺少对于飞行器运动特性的考虑。
本文在分析研究传统人工势场法的基本理论及其优缺点的基础上,针对旋翼飞行器的运动特性,提出了一种基于改进人工势场法的旋翼飞行器侧向机动方法——二次引力势场法。该方法首先应用传统人工势场需获得一条预规划航迹,而后在考虑旋翼飞行器巡航速度、最大有效动力(指飞行器可提供的除去保持旋翼飞行器匀速运动的力以外的动力)等特性的前提下,通过动态选取预规划航迹点作为引力源既约束飞行器在可接受飞行管道内飞行,又导引飞行器依照其运动特性跟踪预规划航迹点完成飞行任务。
1 人工势场基本理论及改进
人工势场法APF是一种以电势场分布为模型的规划方法。具体为:任务区域内的目标点产生引力场,威胁源产生斥力场。其特点是规划速度快,能够保证路径的安全,但由于势函数存在引力和斥力相等的局部极小点,会使算法停滞而无法抵达目标位置,又由于没有代价函数对航迹优劣进行衡量所以不能保证路径的最优[7]。
1.1 传统人工势场
在人工势场中,物体在引力和斥力的综合作用下,沿着势场力方向移动。该移动方向能使飞行器避开已知的威胁源,并到达目标位置。本文将不规则威胁源简化为圆形障碍物,将飞行器和目标点简化为质点,并只讨论二维空间中的Khatib人工势场模型。如图1所示,飞行器在空间任意位置的运动方向由目标产生的引力场和威胁源产生的斥力场形成的合力场决定[8]。

图1 传统人工势场中的飞行器受力图
其任务区域中节点的引力势函数和斥力势函数分别定义为:
(1)
(2)
式中,k、m为正常数,ρG(q)为飞行器与目标点之间距离,ρ(q)为飞行器与威胁源之间的最短距离,ρ0为威胁源最大威胁半径。
相应的引力函数和斥力函数如下:
Fatt(q)=-kρG(q)
(3)
(4)
于是,总的势场力为目标点产生的引力和各个威胁源产生的斥力的矢量和:
F=Fatt+∑Frep
(5)
Khatib选择了FIRAS函数构造威胁源附近的斥力函数。当然,也可以选择其他函数,但在选择势场函数时,必须保证所使用的函数及其导数是连续的[9]。
1.2 二次引力势场法
人工势场多应用于机器人的路径规划,但由于机器人的运动特性与旋翼飞行器有很大不同。为更好地贴近旋翼飞行器的运动特性,使旋翼飞行器的速度特征更加明显,本文将提供一种改进方法以供研究。此方法中将首先应用适应于机器人路径规划的人工势场算法得出一条预规划航迹,而后以此路径所提供的轨迹点为基础引力点,导引飞行器使其能够沿该预规划航迹飞行,已完成飞行任务。下面我们首先建立二次引力势场法的函数模型。
1.2.1 第一引力场
建立可接受飞行管道,当旋翼飞行器位置脱离可接受管道时,第一引力场将对其产生相对于给定轨迹的引力,将其拉回可接受飞行管道。第一引力场函数建立如下:
(6)
故第一引力函数为
Fatt1(q)=-αl(q)
(7)
其中,l(q)为飞行器与对应给定轨迹点的距离,α为常系数。
1.2.2 第二引力场
为使旋翼飞行器高效跟踪预规划航迹飞行,建立第二引力场。由于给定的预规划航迹均由点组成,并为方便计算,现做以下假设及规定:
1)飞行器初始点与预规划航迹初始点重合;
2)旋翼飞行器速度基本不变,在某一常值附近波动;
3)以相邻给定轨迹点横坐标之差为单位步长;
4)给定轨迹点的速度方向为该点切线方向(切向方向定义为该点与下一点连线方向)一致。
5)力的改变是瞬时的。

(8)


图2 旋翼飞行器速度变化分析图
通过解算方程组可得第二引力,以及引力作用时间t为
(9)
当飞行器位于可接受飞行管道中,则其所受力为
(10)
当飞行器飞离可接受飞行管道,则其所受合力为
(11)
合力作用时间为方程组所解算的t,并要求合力大小不能超过飞行器所能提供的最大力,纵向及侧向过载亦应符合飞行器的要求。依此将人工势场理论应用于旋翼飞行器侧向机动方案的设计。
2 仿真实验
2.1 算法流程
在环境模型建立的基础上,依据前文对于二次引力势场法的定义,基于二次引力势场法的路径规划算法流程设计如图3所示。
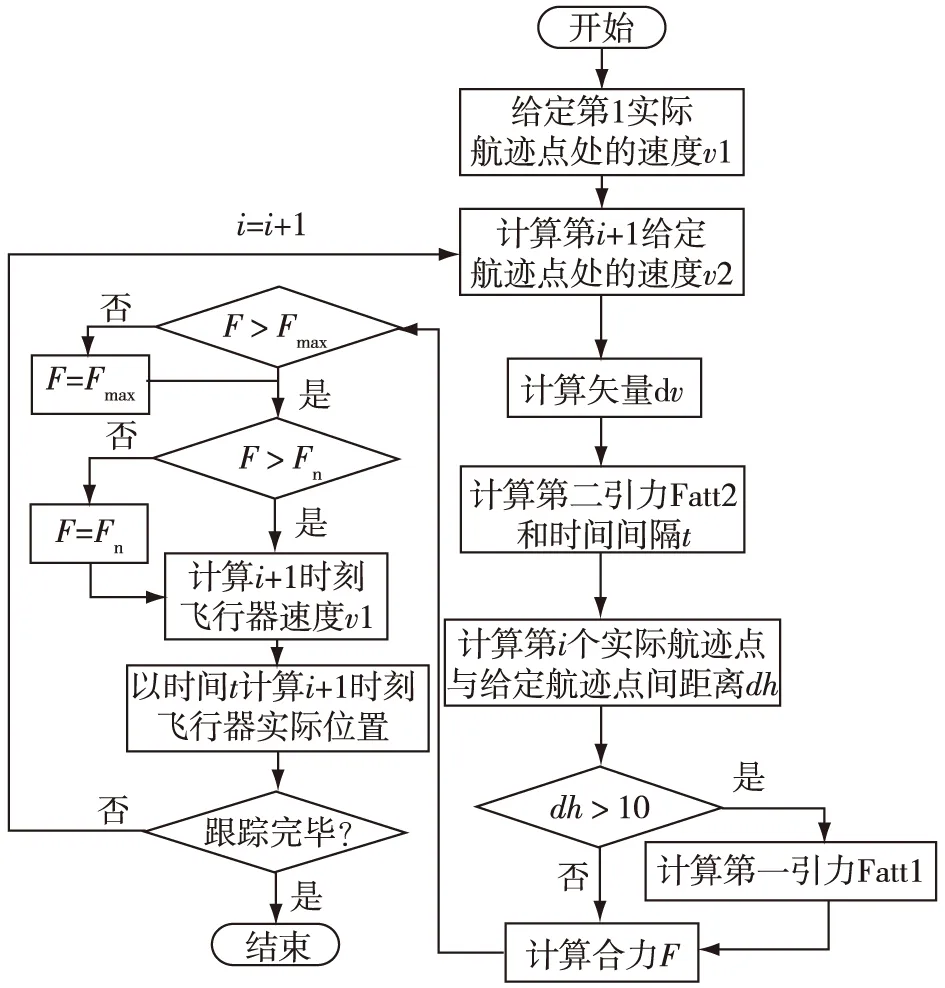
图3 二次引力势场法算法流程图
2.2 仿真实验
首先以文献[10]提供的方法计算预规划航迹。
仿真实验中的基本参数如表1所示。
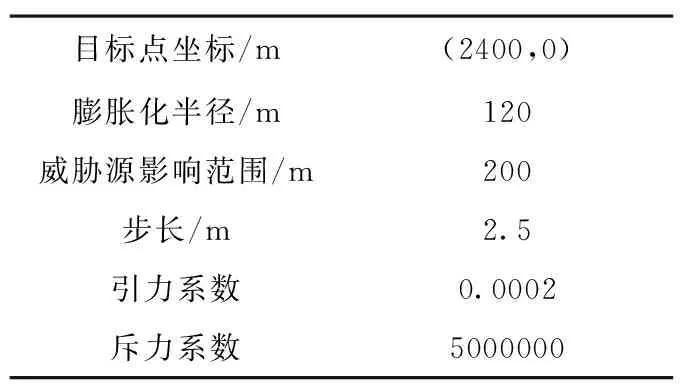
表1 实验基本参数(1)
威胁源中心坐标如表2所示。
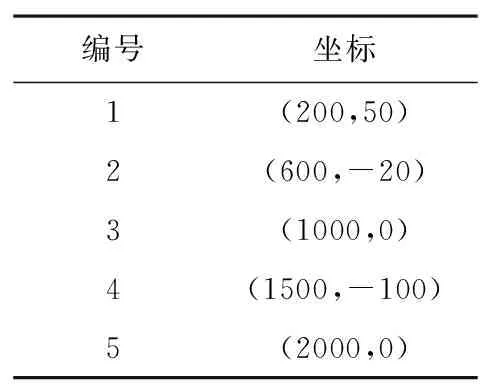
表2 威胁源中心坐标
基于以上数据,仿真实验结果如图4所示。

图4 预规划航迹仿真结果图
根据图3,现对文中提出的二次引力势场法进行仿真实现。实验中的基本参数如表3所示。

表3 实验基本参数(2)
仿真结果如图5所示(单位均为m)。

图5 基于二次引力势场的航迹仿真结果图
从以上的仿真结果可以看出,应用传统人工势场规划得出的预规划航迹与应用二次引力势场法得到的改进航迹在出现“急转”处有明显差别,实际航迹点的变化趋势在“急转”处均落后于预规划航迹点的变化趋势,而在“急转之后”实际航迹点与预规划航迹点又慢慢趋于一致,这是由二次引力势场法的定义与计算方法决定的。为更好地比较这两种方法,现对两种规划方法中旋翼飞行器的受力与及能量消耗进行对比分析。
根据两条轨迹给出的不同航迹点及关于速度的假设,利用公式(8)、(9)计算得出的飞行器受力,将解得的力对时间积分求解飞行器在两条路径中的能量消耗。经过计算结果如图6、7所示。

图6 旋翼飞行器受力对比图

图7 旋翼飞行器能量消耗对比图
显然,应用传统人工势场法规划得到的航迹因为没有考虑飞行器自身特性约束,在某些特殊位置的轨迹及其变化趋势并不符合飞行器的运动实际,这可能使飞行器因为过载过大,或自身动力不足等原因发生危险。其次从图7可以看出使用二次引力势场法得到的规划航迹相比于传统人工势场法得到的航迹具有减少旋翼飞行器能耗的优势。综上,文中所提出的改进方法,以预规划航迹为基础,引入飞行器运动特性约束,得到了一条切实可行且更具优势的规划路径。
3 结束语
针对基于人工势场的传统路径规划算法没有充分考虑巡航飞行器运动特性的问题,本文在学习传统人工势场基本理论和改进人工势场方案方法的基础上,根据旋翼飞行器的运动特性提出二次引力势场法对飞行器的侧向机动方案进行了研究,实验结果表明,相比于传统人工势场法得到的航迹,二次引力势场法得到的轨迹更加符合旋翼飞行器的运动特性,同时也具有生成路径平滑、安全、能耗小等优点,达到了设计要求。
[1] 郑昌文,严平,丁明跃,等.飞行器航迹规划研究现状与趋势[J].宇航学报,2007,28(6):1441-1445.
[2] Koren Y, Borenstein J. Potential field methods and their in-herent limitations for mobile robot navigation[C]∥Proc ofInternational Conference on Robotics and Automation, 1991:1398-1404.
[3] LIU Zai-xin, YANG Long-xiang, WANG Jin-ge. Soccer robot path planning based on evolutionary artificial field [J]. Advanced Materials Research, 2012,562(8):955-958.
[4] ZHU Yi, ZHANG Tao, SONG Jing-yan. Study on the Local Minima Problem of Path Planning Using Potential Field Method in Unknown Environments[J]. Acts Automatics Sinica, 2010,36(8):1121-1130.
[5] HOU Yuan-bin, WANG Wei, LU Xiacryue. Mobile Robot Path Planning and Research in the Improved Artificial Immune Algorithm[J]. Advanced Materials Research, 2012, 466(2):864-869.
[6] 覃柯,孙茂相,孙昌志.动态环境下基于改进人工势场法的机器人运动规划[J].沈阳工业大学学报,2004, 26(5): 568-571.
[7] 庄晓东,孟庆春,高云,等.复杂环境中基于人工势场优化算法的最优路径规划[J].机器人,2003,25(6):531-535.
[8] 张殿富,刘福.基于人工势场法的路径规划方法研究及展望[J].计算机工程与科学,2013,35(6):88-94.
[9] YE Bin-qiang, ZHAO Ming-fu, WANG Yi. Research of Path Planning Method for Mobile Robot Based on Artificial Potential Field[C]∥Proc of International Conference on Multimedia Technology, 2011:3192-3195.
[10]沈文君.基于改进人工势场法的机器人路径规划算法研究[D].广州:暨南大学,2009.
[11]邓学强.基于改进人工势场法的移动机器人路径规划[J].山东理工大学学报(自然科学版),2014,28(1):38-41.
Rotorcraft Route Planning Based on Artificial Potential Field
LIU Chang, LUO Ning-xi,LU Li-bin,TAN Li-ning,LI Wen-hao
(Rocket Force University of Engineering,Xi’an 710025, China)
Artificial potential field is one of the methods applied in Robot Path Planning.On the question that the traditional algorithm of path planning based on artificial potential field does not consider the kinetic characteristic of the rotorcraft,in the article,based on the preliminary planning track, we formulate an improved method called secondary gravitational potential field method.It enables the rotorcraft to follow the feasible trajectory by keeping choosing the given points as the gravitational source. The results of the Matlab prove that the method is effective.
route planning; artificial potential field; rotorcraft
2016-07-20
刘 畅(1994-),江苏连云港人,硕士研究生,研究方向为航空宇航科学与技术。 罗宁曦(1996-),本科。 芦利斌(1964-),副教授。 谭力宁(1985-),讲师。 李文豪(1981-),讲师。
1673-3819(2017)01-0101-05
V271.4;E917
A
10.3969/j.issn.1673-3819.2017.01.022
修回日期: 2016-08-29
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
北京航空航天大学学报(2021年4期)2021-11-24
指挥控制与仿真(2021年3期)2021-06-15
汽车工程(2021年12期)2021-03-08
当代陕西(2020年15期)2021-01-07
雷达科学与技术(2020年4期)2020-09-11
北京汽车(2019年4期)2019-09-17
北京航空航天大学学报(2017年7期)2017-11-24
儿童故事画报·发现号趣味百科(2016年6期)2016-08-19
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
