
基于蚁群算法的直升机应召式搜潜航路规划
2017-03-15 02:45吴卫玲苏通献
指挥控制与仿真 2017年1期
李 林,吴卫玲,苏通献
(海军航空工程学院青岛校区,山东 青岛 266041)
基于蚁群算法的直升机应召式搜潜航路规划
李 林,吴卫玲,苏通献
(海军航空工程学院青岛校区,山东 青岛 266041)
航路规划系统是反潜直升机完成应召式搜潜任务的核心,其采用的算法决定了任务完成的效率。结合部队训练、作战实际,系统分析了直升机应召搜潜航路规划系统的基本组成,建立了评价航路规划系统的指标,给出了系统需要考虑的约束条件,并采用蚁群算法进行了仿真计算,最后对基于蚁群算法的直升机应召式搜潜航路规划方法的适用环境进行了总结,对部队有效提高作战、训练效果具有一定的参考价值。
蚁群算法;应召式搜潜;航路规划
飞行器航路规划是伴随着导弹的产生而产生的,最早于20世纪50年代提出,并得到快速发展。我国在航路规划方面的研究起步较晚,最早开展的反舰导弹航路规划研究,也是从20世纪90年代开始的[1]。通常,直升机反潜作战过程包括搜索、识别、定位和跟踪或攻击四个阶段。搜索是直升机反潜行动中的首要环节,搜索不到目标,就无法攻击目标。搜索包括三种方式:应召式搜索、巡逻式搜索和检查性搜索[2]。应召式搜索是反潜作战、训练中使用最多的战术方式,如何提高应召式搜潜的效率是部队十分关心的问题。当前,国内尚未有公开发表的关于直升机应召式搜潜航路规划的研究著作和学术论文。本文尝试开展这方面的研究,希望在部队训练中对直升机应召式搜潜进行航路规划、提高搜潜效率方面发挥积极作用。
1 系统组成
由于应召式搜潜在实际作战训练中使用较多,更具有战术价值的实际,本文以直升机应召式搜潜航路规划为研究对象开展相关研究。从执行反潜任务前有无发现潜艇来看,应召式搜潜是指在去目标区域搜潜前已经获取了目标的信息,并根据所获得的少量信息(某一时刻,在某一概略位置发现处于某种状态的潜艇,可能会有潜艇的航向、航速等信息),使得反潜直升机到达目标海域后,再次进行搜索定位[3]。因此,直升机应召式搜潜航路规划系统的任务就是在特定约束条件下,寻找从初始点到目标点,并且满足某种特定指标要求的最优飞行轨迹。
直升机应召式搜潜航路规划系统在通常意义上可以分为软件、硬件两个部分。硬件可以由各种通用或专用的计算机以及相关外设组成。软件是该系统得以实现其功能的重要组成部分,决定着直升机航路规划任务完成的效果。直升机应召式搜潜航路规划系统主要由以下几个方面组成。
1.1 地理信息
地理信息是直升机航路规划所需要的最重要的基础信息。在直升机进行飞行时必须考虑地理信息,以保证直升机的正常安全飞行,而且其精准度决定着规划算法设计出来的航路是否可靠。地理信息是属于静态而且随时间不断变更的数字地图,可以从地图数据库中获取。鉴于直升机搜潜的飞行区域主要在海上,因此选取数字海图为基准地理信息库。而数据库中描述地理信息的数字地图的格式,也很大程度上影响着航路规划的性能,因此不同的航路规划需要准备专用的数据格式。
1.2 战场态势信息
战场态势信息是从作战系统中获取战场上的实时态势信息,主要包括敌我双方的兵力部署、敌方火力分布、敌方作战系统探测区、战略规避区等[4]。它提供了直升机在搜潜航路中可能存在的障碍或危险,也有利于分析威胁代价,为制定可靠安全的反潜航路提供了有力的支撑。
1.3 信息模型描述
信息模型的描述是对以上两个重要组成在程序中的具体体现和应用描述。它将地理信息以及战场态势信息予以恰当的描述,使得该系统性能以及响应速度达到最佳状态[5]。比如,在主程序设计时,将敌方雷达搜索威胁区用圆形表示(二维空间,在三维空间可以描述成半球),尽管实际会有地球曲率以及海岛等障碍物对雷达等搜索区域进行遮挡,但由于所面临的使用环境为海面上空,因此可以忽略地形对雷达信号的遮挡。本文将根据直升机反潜航路规划的具体情况进行合适的信息描述。
1.4 航路规划算法
航路规划算法作为直升机应召式搜潜航路规划的核心,其方法选择优劣将直接决定成整个系统的性能水平[6]。常见的航路规划的算法主要有简单航路规划、SAS算法、遗传算法、蚁群算法以及改进粒子群优化算法等。在选择直升机应召式搜潜航路规划算法时,除了要考虑算法能否恰当描述航路规划信息、算法的实现难易程度、算法应用的方式以及算法能否进一步优化等诸多方面外,还要充分考虑直升机执行应召式搜潜任务时复杂的战场环境和对算法效率等方面的要求,经过对这几种算法进行研究对比,本文尝试采用蚁群算法对直升机应召式搜潜航路进行规划。
除上述内容外,直升机应召式搜潜航路规划系统还应包含态势信息分析、预选方案设计、经验效果评估最优方案选择等,其组成如图1所示。

图1 直升机应召式搜潜航路规划系统
2 评价指标
反潜直升机执行应召式搜潜任务的时机通常包括训练、演习和作战等。无论哪种情况,实际搜潜效果是衡量搜潜航路规划系统优劣的唯一标准,可以将这一衡量标准分解为战术效果指标、航程指标、安全指标和飞行时间指标等[7]。
2.1 战术效果指标
战术效果指标是指挥员最关心的问题,它直接影响着搜潜任务的成败,要求反潜直升机以最科学合理的方式到达目标区域,影响因素主要有反潜直升机挂载的搜潜器材的作用范围、目标的运动速度和方位以及必要的战术机动等,即
HE=Fm(rss,αss,vms,xms,yms,zms)
式中,HE为战术效果指标,rss为搜潜器材的作用范围,αss为搜索扇面角,vms为目标速度,(xms,yms)为目标坐标,zms为反潜直升机采取的必要的战术机动因素。
2.2 航程指标
航程指标是用来反映反潜直升机从母舰或基地出发到达目标搜索区域所经过的总路程。通常情况下,希望反潜直升机的搜潜航程应尽可能地短,因为航程长自然会缩短在目标区域的搜潜作业时间,也给予敌方潜艇更多的逃脱时间,直接影响反潜直升机的搜潜效能。而且航程过长,被敌方雷达、预警机等探测设备发现的几率也会增加,轻则贻误战机,严重的话可能会遭到敌方攻击,因此该指标对反潜直升机而言是十分重要的。航程指标与直升机飞行航路上的航路关键点数目、转弯半径和转弯角度等因素有关,即
式中,n为航路关键点的数目;f(di,αi,ri)为考虑了转弯半径后的第i个航路点与第i+1个航路关键点之间的飞行距离;di为两个航路关键点之间的距离,αi为第i个航路点出的转弯角度;ri为第i个航路关键点处的转弯半径。由于f(di,αi,ri)是非线性函数,因此SD也是非线性的。
2.3 安全指标
安全指标用来反映直升机在反潜作战的过程中按规划的航线飞行的危险程度。通常情况下,由于飞行导航方位偏差或没有及时更新敌我态势信息、地理信息而受到的来自敌方威胁区以及地形因素所造成的对直升机的威胁,这是反潜作战中首要考虑的因素。考虑到直升机由于海况或者操作造成坠海的可能性,则安全指标可以用下式来描述:

2.4 飞行时间指标
飞行时间指标是用来反映反潜直升机按预定航路到达目标搜潜区域的时间。通常情况下,希望飞行时间指标越小越好。如果飞行时间过长,就会给目标潜艇更多的时间机动逃逸,更会扩大搜潜范围,这是反潜作战不允许的。因此这里在进行反潜直升机航路规划的过程中所需考虑的重要指标。飞行时间与飞行速度曲线和航程有关,即
式中,v(h,s,e)为直升机的飞行速度曲线;h为直升机的飞行高度;s为直升机的飞行距离;e为海况等环境因素对直升机飞行速度的综合影响。
在直升机应召式搜潜航路规划过程中所要考虑的不只是单纯要求某一项指标的最优,而是在这些重要的指标中权衡利弊,根据具体情况和要求,权衡各个指标在整个航路规划的过程中所占的权重比来选择最优航路。需要说明的是,这些指标是有一定的联系的。比如,当航程指标较大时,其飞行时间也会受影响,毕竟直升机的速度是有限的,因此在设置权重的时候不需要将这两个指标同时设置较大。
3 约束条件
在对直升机应召式搜潜航路进行评价时,仅考虑评价指标会造成顾此失彼的现象,还必须考虑到直升机执行任务所处的环境和自身的特点,即必须考虑威胁、战术、最大航程和机动性能等方面的约束条件[8]。
3.1 威胁约束
威胁约束是直升机应召式搜潜航路规划极为重要的约束条件。在航路规划设计中,威胁是随时间变化的动态约束。反潜直升机面临的威胁源主要有雷达、防空装备、水面舰艇,以及空中的敌方战机等。由于威胁都是在执行任务的过程中必须规避的,因此,将这种约束归结为不可穿越障碍区域,并在具体的实验仿真中适当扩大其区域,以保障反潜直升机在执行任务的过程中因累积偏差造成误入威胁区域的严重不良后果。
假设直升机在离开母舰或陆基飞向搜索区域过程中所有火力威胁区和指定禁飞区的集合为RT,航路曲线为f(x,y,t)=0(x,y,t分别代表航路曲线上任一点的经纬度坐标和直升机的飞行时间),则规划区域中的地形和威胁约束可以描述为
∀x,y,t,f(x,y,t)=0 (x,y)∉RT
3.2 战术约束
在实际的反潜作战中,从目标被发现到消失的时间通常比较短,这就要求反潜直升机必须以最高的效率搜索到目标。因此,战术约束条件是反潜直升机能否搜索到潜艇的重要因素。
1)进入搜索区域的方向、位置约束
对于反潜直升机搜潜而言,沿不同方向进入搜索区域时,目标被发现的概率是不同的,这就造成对应的目标散布概率模型也是不同的,进而要求反潜直升机沿着不同方向、按照不同的搜潜方式进行搜潜,也就是对反潜直升机在搜索区域的进入方向、位置进行约束,即
|HS-H(Xf,Yf,Xt,Yt)|≤DH
式中,HS为预定的进入方向;(Xf,Yf)和(Xt,Yt)分别为直升机最末航路点和目标潜艇被发现时的经纬度坐标;DH为允许的进入方向的最大偏差。
2)时间约束
在执行搜潜任务的过程中,很多情况下对到达预定海域的时间是有约束的,尤其是在多机、舰机协同作战中的要求更高。在此过程中,天气、环境、速度、航路轨迹等都是影响时间这一要素的因素。如果时间过长,则给目标潜艇更多的逃逸时间,增大搜潜难度,因此要求规划航路要尽可能合理,以确保搜潜效率。
3.3 最大航程约束
对于反潜直升机而言,其所带的航空燃油是有限的,其还要在目标区域进行相当一段时间的反潜作业,因此在航路规划的过程中就要求其设计的航路不能过长。若以设置航路点来进行航路规划,则需要计算各个航段节点间的总路程之和不能太长,其航程约束为
JC≤Lmax
式中,JC为某条航路的航程指标;Lmax为燃料消耗指标所允许的最大值。
对于一条具有n个航路点(包括初始点和目标点)的航路,其航程约束可表示为
式中,函数Li-1表示相邻两个航路点之间的航程。
3.4 最小转弯半径
最小转弯半径是考虑直升机在水平面上做航向转变机动的最极限能力值,主要考虑威胁区的影响和目标潜艇做大方向机动时为及时搜索跟踪而进行的机动。两个航路关键点的设置应满足:
式中,|KAKB|是两个航路关键点之间的距离,可以由Bowring公式求得;θ是转弯角度;rmin是最小转弯半径。
3.5 其他约束
除了以上因素以外,航空管制区、禁止飞跃区、第三国飞行限制约束区等也是需要考虑的重要因素[9]。这些因素在日常训练中很少涉及,但舰载反潜直升机在执行远洋训练、作战任务时,也需要考虑以上情况。为仿真方便,对这些因素进行简化,在仿真航路规划设计中将其视为威胁区性质的障碍模型。
4 仿真分析
对直升机应召式搜潜航路进行规划的过程如下所述:首先从数据链或其它途径获取敌方潜艇所出现的概略位置和相对我机所在位置,然后从数据链或内部存储中获取地图信息、战场态势信息、禁飞区等其他因素不可飞跃的区域位置信息,对这些信息进行分析处理得到算法程序所需的禁飞区域图,并对该图中的禁飞区域进行适当地放大处理,最后通过航路规划算法得到最优航路,并显示给飞行员,引导飞行员快速飞向目标海域进行搜潜作业。下面介绍如何利用蚁群算法进行直升机应召式搜潜航路规划。
4.1 蚁群算法
蚁群算法(Ant Colony Optimization,ACO),又称蚂蚁算法,于1992年提出并被广泛应用于寻找最优路径的仿生学算法[10]。该算法利用蚂蚁生活中的搜索范围、所处环境、觅食、移动、避障以及散播信息素七个方面的规律来找出最优解。这些规则是蚁群算法实现航路规划的特征规则,也是航路规划算法中蚂蚁实现其寻找最优航路的基础。
蚁群算法具有如下几个方面的特点:
1)它是一种自组织的算法。即一个系统在该算法的主导下,没有外界因素影响,系统的元素会随着时间和算法的推移而使系统趋于稳定状态的算法。
2)它是一种能够进行大规模数据快速、并行计算的算法。该算法能够进行并行计算搜索,具有较强的可靠性和全局性。
3)它具有正向加强的反馈特性。该算法之所以能够寻找到最优路径,关键在于随着最优路径的优越性体现,使得该路径上的信息素不断加强,从而使更多蚂蚁通过这条路径,进而使信息素更多并形成正向反馈。这也是该算法得以运用的关键特性。
4)它具有较强的适应性和可靠性。该算法适应性较强,只需更改少量参数和模型描述便能快速将算法进行移植。
4.2 适用性分析
蚁群算法在求最优解的能力上具有较强的可靠性和适应性,而且具有并行性,能同时进行相对较大规模的并行搜索处理,因此该算法在寻优等方面得到了广泛的应用,尤其在航路规划方面的优良特性更为突出。然而,该算法也存在一些不足,比如在参数设置方面,该算法在处理不同问题时对参数设置比较敏感,若参数设置不当会导致算法出现收敛速度慢、易陷入局部最优等方面问题,但是,这些缺点也是可以克服的。该算法的多样性保证了蚁群算法能够全面搜索可能的最优解,能够较好地寻找到全最优,不至于陷入局部最优或死循环状态[5]。而且,该算法具有的搜索最优算法的正反馈特性保证了优良的子群体被保留并凸显出来。
综合考虑该算法的优缺点、应用特性和实际使用环境,决定采用该算法进行仿真验证。
4.3 仿真验证
在蚁群算法的设计过程中,为了适应算法寻找路径的规律,将具体地图信息用方格图显示,同样要对禁飞区域进行适当放大。其具体的加载地图数据既可以通过随机生成地图矩阵信息,也可以采用加载txt文档矩阵的形式[11]。采用蚁群算法对直升机进行应召式搜潜航路规划的算法流程如图2所示。

图2 蚁群算法流程图
在该算法中,主函数调用的遗传算法函数为
function [ROUTES,PL,Tau]=yiqun(G,Tau,K,M,S,E,A,B,R,Q)
通过多次实验,寻找到适合路径函数参数,分别对G,K,M,A,B,R,Q参数进行设置,通过更改所需要使用的战场环境,对Tau进行设置。为了方便飞行员使用,仍采用北东坐标系进行设置起始点S和目标点E。在此基础上对航路进行规划设计以求达到最好的效果。
同时,可以通过调节参数值来改变生成的禁飞区域在总地理信息图的空间所占比,从而实现初始战场环境的设置。通过调用蚁群算法函数‘function [ROUTES,PL,Tau]=yiqun(G,Tau,K,M,S,E,A,B,R,Q)’来实现航路的生成。该方式生成的航路效果如图3所示。但是也存在弊端,因为生成的禁飞区域是随机的,也有可能会覆盖起始点或目标点,会无法生成正确的航路,如图4所示。
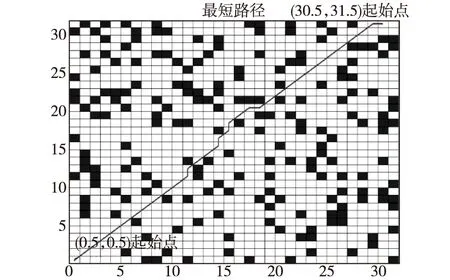
图3 随机禁飞区域生成的航路规划
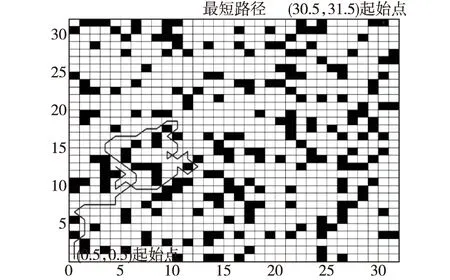
图4 随机生成的禁飞区无法形成正确航路的情况
在采用加载txt文档矩阵时,主函数通过加载txt文件来加载作战环境信息,在实际应用中也可以通过更改加载信息的类型来加载数据,实现在战时可以实时规划航路的目的,其效果如图5、图6所示。

图5 加载txt作战环境矩阵的航路规划最优路径图
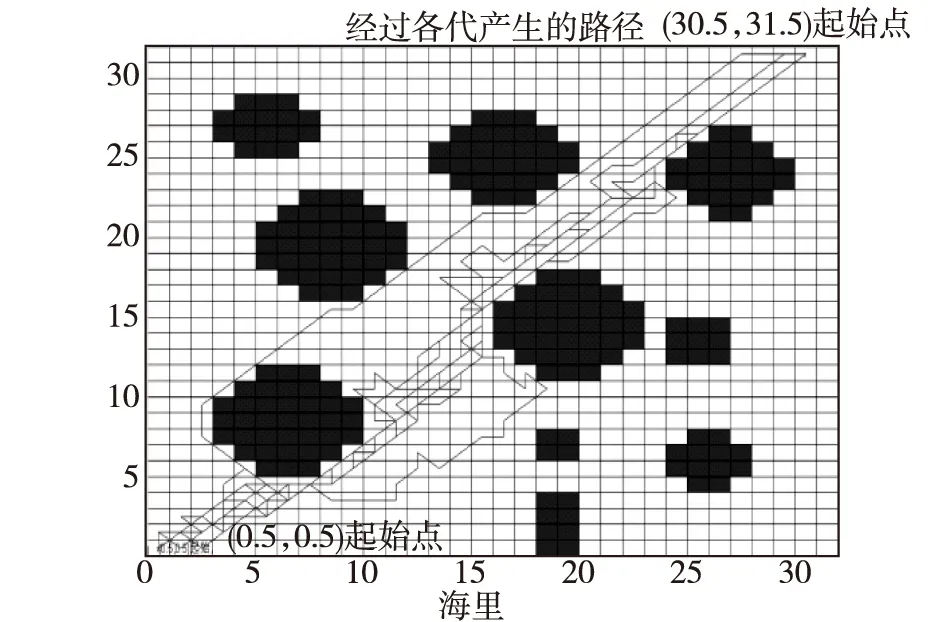
图6 加载txt作战环境矩阵的航路规划图
4.4 仿真结果
通过采用蚁群算法对直升机应召式搜潜航路规划进行仿真分析,可以得出如下结果:
1)设置蚂蚁数量为50只,在地图信息量不是很大的情况下,在32*32的矩阵图进行寻找最优路径约为44.8个方格距离,航路规划寻优效果比较理想;在规划速度方面,当参数设置比较合理时,仿真程序耗时约10s,速度很快;当参数设置接近限制值时,仿真程序耗时约45s,速度较慢。
2)设置蚂蚁数量为100只,在地图信息量进行放大以后,在84*84的矩阵图进行寻找最优路径,迭代次数50次(蚂蚁数量为50只时,也为50次),耗时超过1000s,规划效率明显变差。
5 结束语
本文通过应用蚁群算法对直升机应召式搜潜航路规划进行仿真计算,得到的结果表明:
1)在地图信息量不大的情况下,基于蚁群算法的直升机应召式搜潜航路规划效果和系统运算速度能够较好地满足作战、训练的需求。即一般海情下,在非交战环境下执行搜潜任务或者在交战环境下敌方海上军力一般的情况下,采用蚁群算法对直升机应召式搜潜航路进行规划是比较有效的。
2)在地图信息量比较大的情况下,即执行应召式搜潜区域的海况比较复杂或者地方海上力量比较强大时,无论是航路规划效果还是系统运算速度都会变差,不适于作战、训练的要求。
因此,这就要求执行应召式搜潜时,在算法选择时要充分考虑实际情况进行合理选择,还要注意在不影响搜潜效率的情况下对战场信息进行过滤和必要简化来提高规划效率。
[1] 谢晓方,孙涛,欧阳中辉. 反舰导弹航路规划技术[M]. 北京: 国防工业出版社,2010.
[2] 张圣云,张安,王连柱,等. 反潜飞机对潜搜索法研究[J].火力与指挥控制,2006,31(1):70-71,74.
[3] 杨根源,吴福初,周国庆. 反潜直升机应召搜索使用声纳浮标的作战运用[J].海军航空工程学院学报,2004,19(3):370-372.
[4] 许诚,赵杰,袁有宏,等. 潜艇作战环境及应对措施分析[J].舰船电子工程,2011,31(10):8-11.
[5] 成晓静. 战术任务规划系统研究[D]. 北京航空航天大学,2004.
[6] 叶文,范洪达,朱爱红. 无人飞行器任务规划[M]. 北京: 国防工业出版社,2011.
[7] 黄明,姜长生. 武装直升机航迹规划与轨迹控制研究[D]. 南京航空航天大学,2004.
[8] 曹文锋. 基于改进蚁群算法的飞行器航迹规划研究[D].重庆大学,2011.
[9] 叶文,马武,范洪达. 基于改进蚁群算法的飞机低空突防航路规划[J].中国航空学报(英文版),2005,18(4):304-309.
[10]弓英瑛.蚁群算法的改进研究与应用[D]. 安徽理工大学,2014.
[11]李栋,曹义华,苏姣,等. 基于改进蚁群算法的低空突防航迹规划[J]. 北京航空航天大学学报,2006,32(3):358-362.
Responding-antisubmarine Air Route Planning of ASW Helicopter Based on Ant Colony Algorithm
LI Lin, WU Wei-ling, SU Tong-xian
(Naval Aeronautical Engineering Institute, Qingdao Campus, Qingdao 266041, China)
Air route planning system is the core of responding-antisubmarine mission which is carried out by an ASW helicopter, and the efficiency of mission completion is decided by the adopted algorithm. Considering actual army training and combat, this paper analyses the basic elements of responding-antisubmarine air route planning system systematically, constitutes assessment index of air route planning system, presents the constraint conditions which should be considered by the system and carries out simulation calculation by ant colony algorithm. Finally this paper summarizes the applicable circumstances of responding-antisubmarine air route planning methods based on ant colony algorithm, which will be of great value to improve army combat and training efficiency.
ant colony algorithm; responding-antisubmarine; air route planning
2016-11-02
李 林(1979-),男,河南郑州人,硕士,讲师,研究方向为武器系统与运用工程。 吴卫玲(1974-),女,硕士,副教授。 苏通献(1993-),男,助理工程师。
1673-3819(2017)01-0010-06
TJ67;E917
A
10.3969/j.issn.1673-3819.2017.01.003
修回日期: 2016-12-22
猜你喜欢
环球时报(2022-09-15)2022-09-15
军事文摘(2022年15期)2022-08-17
小哥白尼(军事科学)(2022年1期)2022-04-26
火力与指挥控制(2020年2期)2020-04-02
弹道学报(2019年4期)2020-01-10
弹道学报(2018年4期)2019-01-05
军事运筹与系统工程(2018年1期)2018-11-10
指挥控制与仿真(2017年6期)2017-12-18
无人机(2017年10期)2017-07-06
北京航空航天大学学报(2016年7期)2016-11-16
