面向ETC的波达定位及波束形成系统设计
2017-03-13 05:37:42北方工业大学电子信息工程学院曹淑琴
电子世界 2017年4期
北方工业大学电子信息工程学院 马 帅 曹淑琴
面向ETC的波达定位及波束形成系统设计
北方工业大学电子信息工程学院 马 帅 曹淑琴
ETC不停车收费系统是目前世界上最先进的路桥收费方式。该技术在国外已有较长的发展历史,目前ETC系统存在邻道干扰、跟车干扰和其他标签的微波干扰现象,对此本文提出基于波达方向估计算法的解决方法。本文的系统包括波达方向估计和波束形成两部分。
ETC;邻道干扰;波达方向估计;MUSIC算法
1 引言
目前ETC系统多采用相位测向技术实现车辆的定位功能。该技术虽然具有高速运算、定位成功率高、原理简单和易于数字化处理等特点,但是还是存在不少问题。当基线长度小于λ/2时容易因为各个阵元之距离近,造成天线阵元间的互耦,从而导致幅度分布和入射波相位的失真,引起测量误差。但是当基线长度大于λ/2时,所测得的相位与真实的相位之间存在2π整数倍的误差,从而降低了测向精度,造成相位模糊[1]。
在实际应用中,由于车载设备所发射的标签信号处于超高频频段,在存在多径衰落和高斯加性白噪声的无线信道的情况下,微弱的标签信号极容易掩没在噪声当中,这使得基于相位测向的ETC系统在实际应用中容易出现错误定位从而造成放行车辆的情况;基于相位测向算法并不能处理相干信号,但由于实际环境的不确定性,随时产生的多径干扰信号会造成ETC系统出现重复扣费等现象。
2 波达定位及波束形成系统
本系统的基本思想是采用二维MUSIC算法得到车载标签的空间角信息,并通过计算处理得到有用信号的导向矢量。然后采用capon算法对信号进行空间滤波从而提取目标标签的有效信号。本系统的各模块划分如下图(2.1)所示:
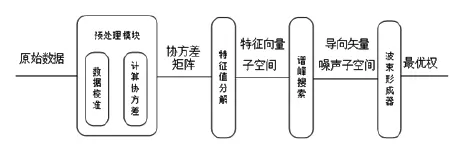
图2.1 本系各模块划分
2.1 数据预处理
2.1.1 数据校准
由于解析信号容易获得信号的特征参数进行信号处理,但是实际生活中所存在的信号为实信号,所以通信系统的接收端需进行数字化方案,即在AD转换之后,信号解调前需对所釆集到的实信号进行数字化处理,其过程是对实信号进行正交分解从而构成解析信号。基本原理如下图(2.2)所示:

图2.2 正交分解原理
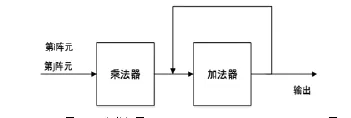
图2.3 协方差模块结构
2.1.2 计算协方差矩阵
假设经过校准处理的信号为复数矢量:

协方差矩阵公式为:

则上式(2.1)中协方差矩阵元素的计算公式为(2.2)∶

2.2 特征值分解模块
对于矩阵一般有三种方法求解特征值:雅可比旋转法、QR分解法和单侧旋转法。雅可比旋转法是一种求实对称矩阵的特征值和其对应特征向量的方法,而单侧旋转法是雅可比旋转法的变形。由上节可知,预处理后的的协方差矩阵为复对称阵,若采用雅可比旋转法或单侧旋转法需要将协方差矩阵实数化,这样会增加运算量。并且QR分解法较雅可比算法的收敛速度更快。所以本系统的设计采用QR分解法实现特征值分解。
QR分解的基本步骤如下[1]:
将矩阵A进行矩阵乘法运算,得到矩阵B=ATA;
构造n*2n阶矩阵(ATA AT),即(B C),并对其进行行初等变换;
将行初等变换后矩阵进行数据处理,最终结果为(RQT),完成对初始矩阵A的QR分解。
2.3 谱峰搜索及波束系数形成
当求得噪声空间的特征向量之后就需要构造MUSIC算法的伪谱函数。根据MUSIC算法的基本原理可知伪谱函数的表达式为:

表1

图3.1θX+=0度时,三标签的波峰
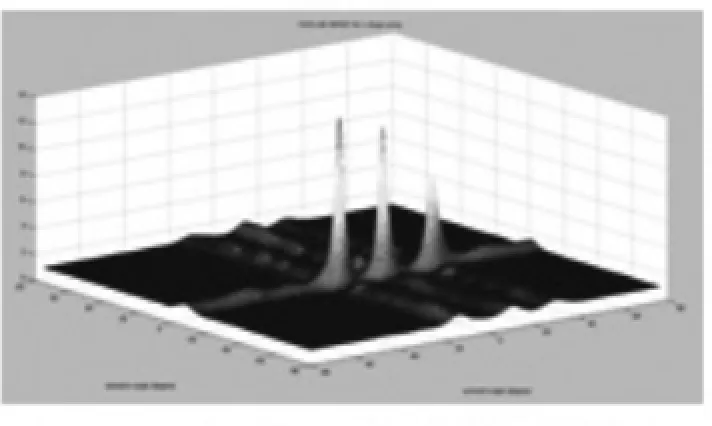
图3.2θX+=15度时,三标签的波峰

图3.3θX+=30度时,三标签的波峰

图3.4θX+=45度时,三标签的波峰

图3.4θX+=54度时,三标签的波峰

上式(2.3)的p个ω值ω1,ω2,···,ωp给出p个信号的波达方向θ1,θ2,···,θp。

3 仿真结果与分析
为了验证本系统的可行性以及评价系统性能,本文给出matlab下的仿真例子。本文所有阵列配置为8阵元的L阵,,各阵元间距为λ/2,快拍数为1024。仿真的结果如下:
3.1 三信号源在0、30、45、60四个角度附近的测量结果如表1所示
3.2 三标签在X+方向上旋转时的波峰图
从图(3.1)、(3.2)、(3.3)中可以看到三个波峰,波峰较为清晰,波峰的顶点所对应的坐标即标签信号的幅度与相对于天线阵列的到达角。随着标签信号相对于天线阵列的到达角的增大,到达角较大的信号已经出信号模糊,如图(3.4)、(3.5)。
从以上仿真真结果可以看出,当角度小于40度时,本系统可以对信号源进行精确定位,在入射角达到45度时,开始出现了信号模糊,当入射角到达54度以上时才出现信号混乱,无法对信号源进行准确定位。多次仿真表明,本系统在X-,Y+,Y-方向上均可实现+-45度范围内的标签的精准定位。
4 结语
本文针对ETC系统中存在的邻道干扰、跟车干扰和其他标签的微波干扰现象,提出了基于二维波达方向估计和波束形成器的定位与滤波系统。经过matlab仿真验证,本系统可以在X、Y方向的-45~+45度范围内实现对多个信号源的精准定位,并通过导向矢量得到波束形成器的最优权,这对解决如今ETC系统中的邻道干扰等问题具有实际意义。
[1]袁孝康.相位干涉仪测向定位研究[J].上海航天,1999,(03):3-9.
[2]袁生光.对称矩阵特征值分解的硬件实现研究[D].浙江大学,2008.
[3]仲雪洁.典型矩阵分解的FPGA计算方法研究[D].哈尔滨工业大学,2012.
猜你喜欢
水利规划与设计(2020年1期)2020-05-25 08:01:28
理科考试研究·初中(2019年11期)2019-12-11 10:11:36
数学大世界·下旬刊(2019年3期)2019-10-14 22:30:44
中国测试(2019年1期)2019-07-01 02:31:40
中南大学学报(自然科学版)(2016年2期)2017-01-19 07:37:03
系统工程与电子技术(2016年4期)2016-08-24 07:46:00
中国医药指南(2016年1期)2016-07-11 11:57:51
Transactions of Nanjing University of Aeronautics and Astronautics(2015年2期)2015-11-24 02:39:22
电测与仪表(2014年5期)2014-04-09 11:34:00
科技创新导报(2012年21期)2012-04-29 05:33:38