
基于扩张状态观测器的SMPMSM无模型控制
2017-03-09 07:31李红梅
微特电机 2017年1期
周 慧,李红梅
(合肥工业大学,合肥 230009)
基于扩张状态观测器的SMPMSM无模型控制
周 慧,李红梅
(合肥工业大学,合肥 230009)
电动汽车永磁同步电动机(PMSM)驱动系统运行在复杂多变的工况条件下,由此引起的电机参数不确定性将直接影响基于经典PI控制的PMSM驱动系统性能。为此,引入基于数据驱动的无模型控制,同时为了简化控制器结构和提升控制精度,创新性地将无模型控制与扩张状态观测器(ESO)设计相结合,首先建立面装式永磁同步电动机(SMPMSM)的超局部模型,再设计SMPMSM交、直轴定子电流的无模型控制器,架构基于ESO的无模型控制的SMPMSM驱动系统。最后,通过系统建模和与基于经典PI控制的SMPMSM驱动系统的仿真对比研究,分析建议的SMPMSM驱动系统的动、静态性能及其抗参数变化的鲁棒性再给出结论。
面装式永磁同步电动机驱动系统;参数不确定;扩张状态观测器;超局部模型;无模型控制
0 引 言
永磁同步电动机(PMSM)具有效率高、可靠性强、功率密度大、体积小等优点,适合作为电动汽车驱动电机,其驱动控制技术是电动汽车高效安全可靠运行的保证。对于电动汽车PMSM驱动系统,不仅要求系统兼具良好的动态和稳态性能,同时要求系统具有抗参数变化的鲁棒性[1-3]。
电动汽车PMSM因受运行工况的影响存在参数不确定性,受系统运行温度的影响,电枢电阻将会出现高达40%的变化;由于铁磁材料的磁导率随温度变化,磁路饱和程度呈现非线性特性,定子电感也会在较大范围内变化,永磁体磁链可能会出现高达20%的变化[4]。
电机参数不确定性的存在将直接影响基于PI控制的PMSM驱动系统性能,轻则导致系统性能下降,重则引起系统运行失稳。有效解决方案之一是在系统运行过程中,通过电机参数的在线辨识实现PI控制器参数与前馈解耦电压的自适应更新,但该方案存在计算量较大,系统实现较繁琐的技术不足,且电机参数的辨识精度直接影响系统的运行性能及稳定性[5]。
基于PMSM数学模型设计扰动观测器是另一种可供选择的解决方案,其实现思路是设计扰动观测器在线估计出由电机参数变化所引起的扰动电压,再通过前馈补偿抵消该扰动电压,提高系统的动静态性能与鲁棒性。但是,该方案存在控制结构复杂,且扰动观测器设计依赖于电机数学模型,无法解决由于实际存在的逆变器非线性对系统性能产生的负面影响,难以获得良好的实时控制效果[6]。
针对具有参数不确定性和未建模动态的非线性系统,不依赖于系统数学模型,仅利用系统输入和输出数据的无模型控制自上世纪七十年代末被提出以来,不断获得研究关注且已取得了长足的发展,如韩京清研究员提出的自抗扰控制(ADRC)、侯忠生教授提出的无模型自适应控制和MichelFliess提出的无模型控制(ModelFreeControl,MFC)等[7-10]。
MFC是基于系统的输入和输出数据建立系统的超局部模型再进行控制器的设计,达到仅利用系统输入输出数据完成系统实时控制的目的。无模型控制对系统存在的内、外扰动、未建模动态及测量噪声具有较强的鲁棒性,而且控制器设计更为简单有效,无需被控对象的模型阶次与参数信息,控制器结构简单,且具有整定参数少的技术优势[10]。为了实现具有参数不确定性的非线性系统的无模型控制,常采用代数法在线估计表征系统包含已知及未知部分的F,基于代数法的F估计中,需要计算出系统含噪声输出信号的一阶微分,F的估计精度与系统采样时间和采样数目有关,目前主要存在计算复杂耗时的不足。
ADRC的自抗扰控制器由微分跟踪器(TD)、扩张状态观测器(ESO)和非线性状态误差反馈控制律(NLSEF)组成,仅需要系统的输入和输出数据,控制思想清晰。通过扩张状态观测器的设计实现系统状态变量的估计及计及模型不确定和内外扰动的扩张状态的估计,并通过反馈实现补偿,提升系统的抗扰动能力。但是TD、ESO和NLSEF存在需要整定参数较多,控制器设计难度较大,难以实现系统最优控制的不足[11-14]。
为了实现具有参数不确定的面装式永磁同步电动机(SMPMSM)驱动系统的高性能控制,论文创新性地将MichelFliess提出的无模型控制和韩京清提出的自抗扰控制相结合,设计SMPMSM驱动系统无模型控制器,设计思路是保留无模型控制器结构简单、待整定参数少的优点,设计ESO估计PMSM驱动系统超局部模型中表征系统已知和未知部分的F,旨在简化F估计的同时,提高估计精度。在上述研究的基础上,架构基于d,q轴定子电流无模型控制的SMPMSM驱动系统,通过系统仿真研究证实SMPMSM驱动系统无模型控制方案的可行性和有效性。
1 考虑电机参数不确定和未建模动态的SMPMSM的数学模型
考虑电机参数不确定和未建模动态的影响,在同步旋转的d-q轴坐标系下SMPMSM的定子电压方程可表示[15]:
(1)
电磁转矩表达式:
(2)
式中:ud,uq表示d,q轴定子电压;id,iq表示d,q轴定子电流;ωe表示电角速度;L表示电机d,q轴电感;R为定子电阻;ψf表示永磁体磁链;p表示极对数;下标“o”表示电机的标称参数。Δud,Δuq,ΔTe表示由于电机参数变化和磁通谐波以及未建模动态引起的不确定量,其表达式:
(3)
(4)
式中:ΔR=R-Ro,ΔL=L-Lo,Δψf=ψf-ψfo,εd,εq,εTe表示未建模动态引起的不确定量。
SMPMSM的机电运动方程:
(5)
式中:J为电机转子转动惯量,ωm为机械角速度,且满足ωe=pωm,TL为负载转矩。
选择id,iq和ωe为状态变量,联立式(1)、式(2)和式(5),构成考虑电机参数不确定和未建模动态的SMPMSM数学模型。
2 基于扩张状态观测器的SMPMSM无模型控制
分析考虑电机参数不确定和未建模动态的SMPMSM数学模型,经典的PI控制难以获得系统良好的动静态性能。为此,论文创新性地将无模型控制引入至PMSM驱动系统,旨在实现系统控制性能和鲁棒性的全面提升。
首先基于系统的输入和输出数据,建立SMPMSM的超局部模型:
(6)
式中:αd,αq分别表示SMPMSM定子d,q轴电压系数;Fd,Fq包含了系统已知部分及未建模动态和参数不确定性等未知部分。
基于SMPMSM的超局部模型,设计无模型控制器,经推导获得SMPMSM定子d,q轴参考电压的表达式:
(7)
针对SMPMSM的超局部模型,设计定子d,q轴扩张状态观测器,d轴扩张状态观测器可表示:
(8)

(9)
式中:fal(e,α,δ)为最优综合控制函数;e是误差信号;α是非线性因子;δ是滤波因子。
q轴扩张状态观测器的设计思路与d轴相同,可表示:
(10)
设计完成的基于扩展状态观测器(ESO)的定子d,q轴无模型电流调节器框图如图1所示。
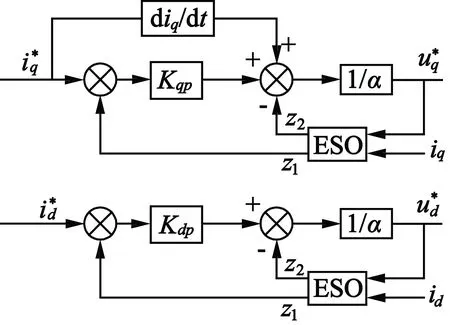
图1 基于ESO的无模型电流调节器
3 系统仿真研究
基于ESO的无模型电流调节器控制的SMPMSM驱动系统框图如图2所示为,为了验证所提控制方案的有效性,将其与基于经典PI控制的SMPMSM驱动系统进行性能对比分析研究。SMPMSM参数如表1所示,基于扩张状态观测器的PMSM无模型控制器参数:Kdp=Kqp=2,αd=αq=909,α1=0.5,α2=0.25,δ=0.01,β1=9 000,β2=400 000,b=909。PI控制器参数:截止频率ωcc=400Hz,Kp=2.76,Ki=100.53。
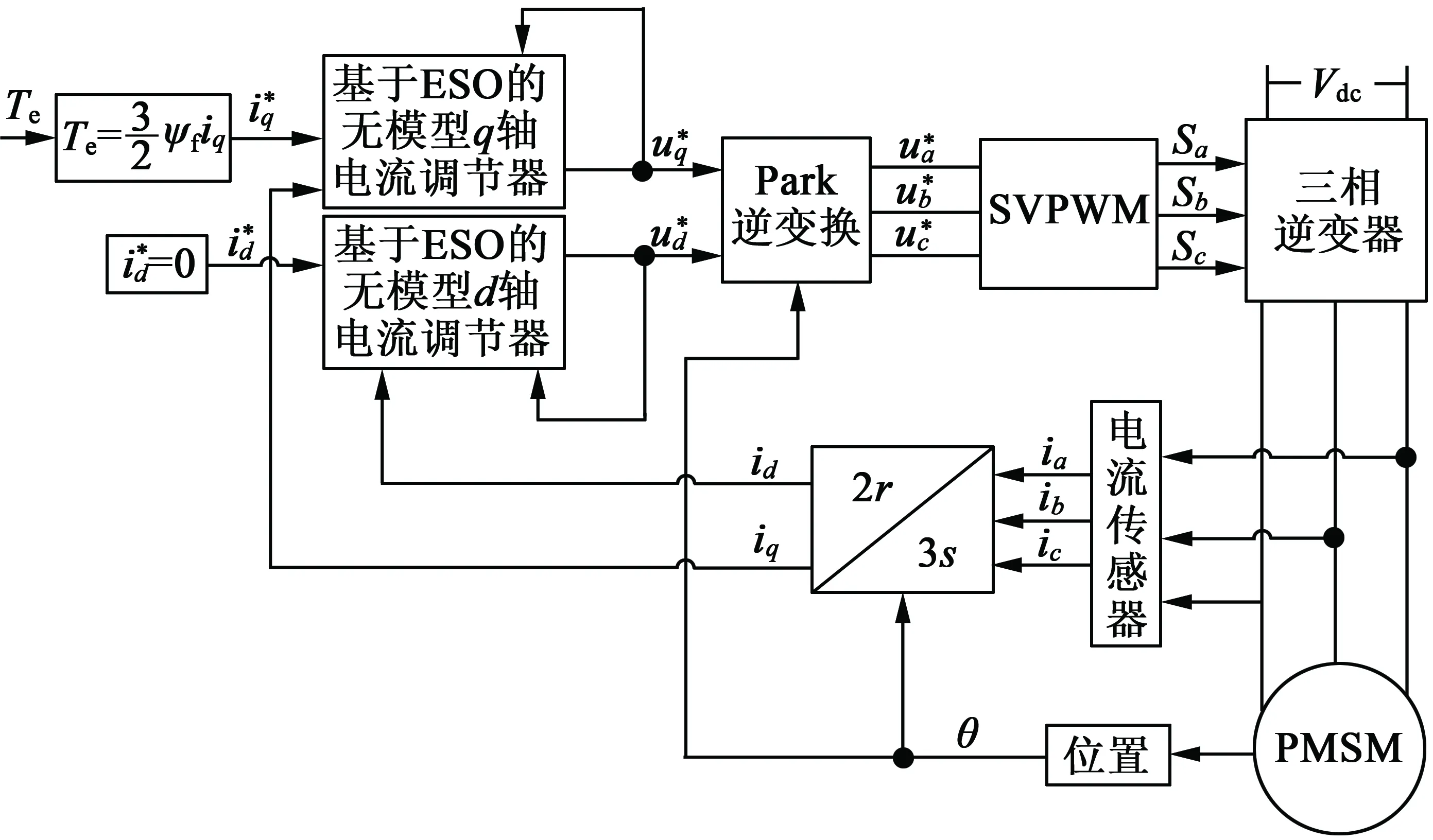
图2 基于MFC的SMPMSM驱动系统
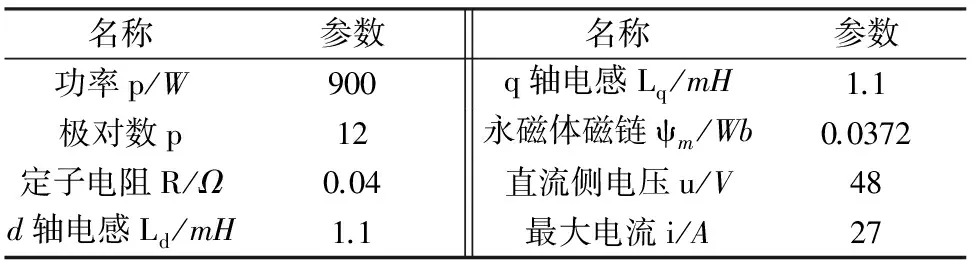
名称参数名称参数功率p/W900q轴电感Lq/mH1.1极对数p12永磁体磁链ψm/Wb0.0372定子电阻R/Ω0.04直流侧电压u/V48d轴电感Ld/mH1.1最大电流i/A27
基于MATLAB/Simulink软件建立SMPMSM驱动系统仿真模型并进行系统仿真研究。SMPMSM驱动系统由模拟测功机拖动至300r/min,然后在0.05s时给定指令转矩15N·m,在0.2s时将指令转矩减小为10N·m,系统仿真结果如图3和图4所示。由图3(a)和图4(a)可见,在标称参数下,建议的基于ESO的MFC的SMPMSM驱动系统输出转矩和d,q轴定子电流均能够准确跟踪其指令值,系统兼具较好的动态和稳态性能;图3(b)和图4(b)表明传统的PI控制器在标称参数条件下仍然存在一定的超调,动态性能稍差。
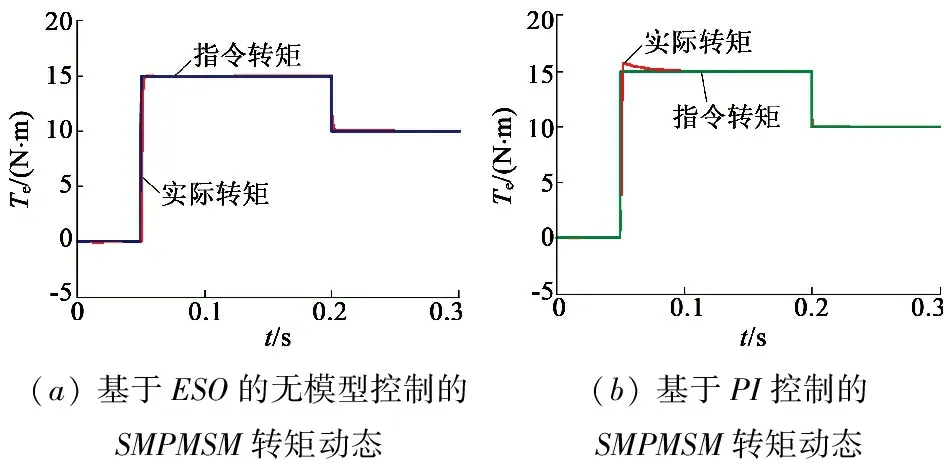
(a)基于ESO的无模型控制的SMPMSM转矩动态(b)基于PI控制的SMPMSM转矩动态
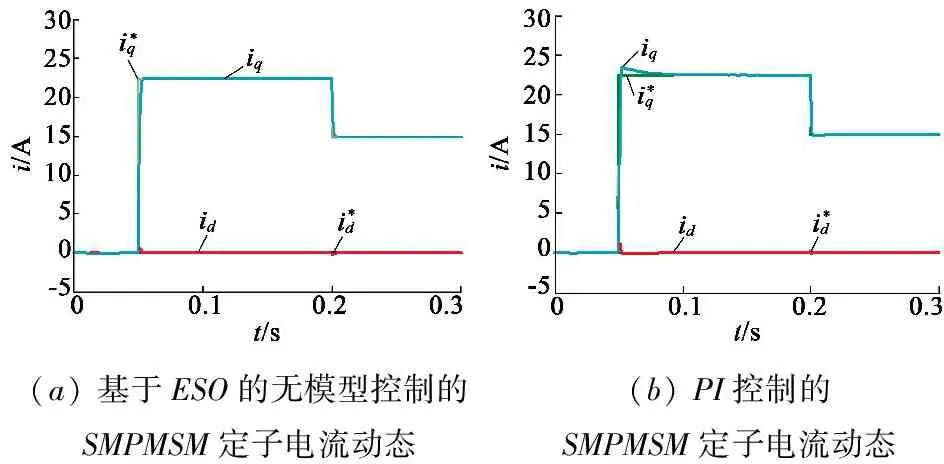
图3 标称参数下不同控制方案下的SMPMSM转矩动态
图4 标称参数下不同控制方案下的SMPMSM电流动态
考虑到电机实际运行时参数是变化的,在系统仿真测试中设置永磁体基波磁链较标称参数减小10%,电感较标称参数减小30%,即ψf=0.033 48Wb,L=0.77mH,SMPMSM驱动系统由模拟测功机拖动至300r/min,然后在0.05s时给定指令转矩15N·m,在0.2s时将转矩降为10N·m。
由图5(a)和图6(a)可知,建议的SMPMSM驱动系统输出转矩动态和定子d,q轴电流仍然能够快速准确地跟踪其指令值,具有很好的鲁棒性。
由图5(b)和图6(b)可知:基于经典PI控制的SMPMSM系统在电机发生参数变化后,电机输出转矩和d,q轴定子电流均无法实现对其指令值的快速准确跟踪,而且系统达到稳态所用时间明显增大,鲁棒性明显下降。
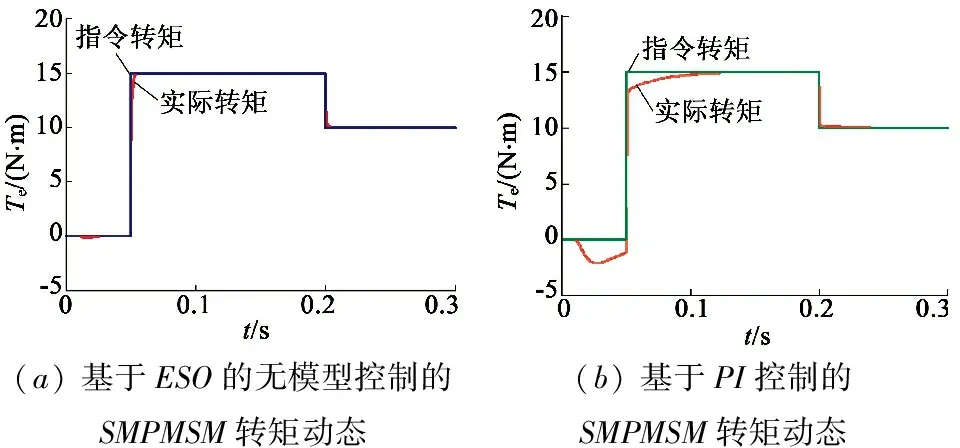
(a)基于ESO的无模型控制的SMPMSM转矩动态(b)基于PI控制的SMPMSM转矩动态
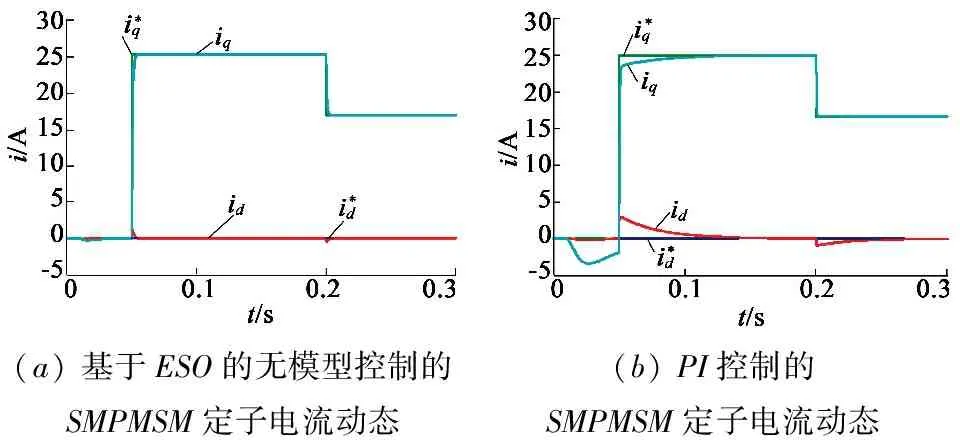
图5 参数变化时不同控制方案下的SMPMSM转矩动态
图6 参数变化时不同控制方案下的SMPMSM电流动态
4 结 语
鉴于复杂多变的工况下电动汽车PMSM驱动系统存在的电机参数不确定性将直接影响基于经典PI控制的PMSM驱动系统性能,甚至引起系统运行失稳。为此,论文基于系统的输入输出数据,建立不依赖于SMPMSM数学模型的超局部模型;创新性地将无模型控制器与扩张状态观测器的设计相结合,即设计扩张状态观测器估计SMPMSM超局部模型中表征系统已知部分和未知部分的F,实现了基于ESO的SMPMSM的无模型控制。系统仿真研究表明:较之经典PI控制的SMPMSM驱动系统,建议的SMPMSM驱动系统具有输出电流和转矩动态收敛速度快、超调小、稳态精度高和鲁棒性好等技术优势,兼具良好的动态和稳态性能,可望直接推广应用于电动汽车驱动电机的实时控制。
[1]NAKAIH,OHTANIH,SATOHE,etal.Developmentandtestingoftorquecontrolforthepermanent-magnetsynchronousmotor[J].IEEETransactionsonIndustrialElectronics,2005,52(3):800-806.
[2]KRISHNANR.Electricmotordrive:“modeling,analysis,andcontrol.uppersaddleriver[M].NJ,UniteStates:Prentice-Hall,2011.
[3]RAMAKRISHNANR,ISLAMR,ISLAMM,etal.Realtimeestimationofparametersforcontrollingandmonitoringpermanentmagnetsynchronousmotors[C]//IEEEInternationalElectricMachinesandDrivesConference.IEEE,2009:1194-1199.
[4] 李红梅,陈涛,姚宏洋.电动汽车PMSM退磁故障机理、诊断及其发展[J].电工技术学报,2013,28(8):276-284.
[5]ICHIKAWAS,TOMITAM,DOKIS,etal.Sensorlesscontrolofpermanentmagnetsynchronousmotorsusingonlineparameteridentificationbasedonsystemidentificationtheory[J].ElectrialEngineering,2006,53(2):363-372.
[6]KIMSH,CHOICH,SEOKJK.Voltagedisturbancestate-filterdesignforprecisetorque-controlledinteriorpermanentmagnetsynchronousmotors[C]//EnergyConversionCongressandExposition(ECCE).IEEE,2011:2445-2451.
[7] 韩京清.自抗扰控制技术[J].前沿科学,2007(1):24-31.
[8] 韩京清.非线性状态误差反馈控制律──NLSEF[J].控制与决策,1995(3):221-225.
[9]HOUZhongsheng,XIONGDan.Theadaptivecontrolsystemdesignwithamodel-freeexternalloopasacompensator[C]//FifthWorldCongressonIntelligentControlandAutomation.IEEE,2004:444-448.
[10]FLIESSM,JOINC.Model-freecontrol[J].InternationalJournalofControl,2013,86(12):2228-2252.
[11] 黄庆,黄守道,匡江传,等.基于模糊自抗扰的PMSM无速度传感器控制[J].湖南大学学报(自然科学版),2012,39(7):37-43.
[12] 薛薇,路鸦立.永磁同步电机调速系统的模糊自抗扰控制[J].电机与控制应用,2013,40(8):57-60.
[13]LIUMing,SHAOCheng.Auto-disturbances-rejectioncontrolleranditsparameteradjustingforasynchronousmotor[J].ControlandDecision,2003,18(5):540-544.
[14]SUNLiming,JIANGXuezhi,LIDonghai.TurningofAuto-disturbance-rejectioncontrollerforaclassofnonlinearplant[J].ActaAutomaticaSinca,2004,30(2):251-254.
Model-FreeControlofSMPMSMBasedonExtendedStateObserver
ZHOU Hui, LI Hong-mei
(HefeiUniversityofTechnology,Hefei230009,China)
Thepermanentmagnetsynchronousmotor(PMSM)drivesystemofelectricvehicleoperatesundercomplicatedandchangeableworkingconditions,parametricuncertaintieswillappearandwilldirectlyaffecttheperformanceofPMSMdrivesystembasedonclassicalPIcontrol.Therefore,thedata-drivenmodel-freecontrol(MFC)wasintroduced,theextendedstateobserver(ESO)wasinnovativelycombinedwithMFCtosimplifythecontrollerstructureandimprovecontrolaccuracy.Firstly,theultralocalmodelofsurfacemountedPMSM(SMPMSM)wasbuiltup,thenthed-qaxisMFCcurrentcontrollerofSMPMSMdrivesystemwasdesignedandthemodel-freecontrolledSMPMSMdrivesystemwithESOwereconstructed.Finally,bysystemmodelingandcomparativeresearchwiththeclassicalPIcontrolledSMPMSMdrivesystem,thedynamicandstaticperformanceofproposedSMPMSMdrivesystemanditsrobustnessagainstparametricuncertaintieswasanalyzedandsomevaluableconclusionsareshown.
SMPMSMdrivesystem;parametricuncertainties;extendedstateobserver;ultra-localmodel;model-freecontrol
张萌(1990-), 硕士研究生,研究方向为超声波电机控制技术。
2015-10-12
国家自然科学基金项目(51377041)
TM341;TM
A
1004-7018(2017)01-0058-04
猜你喜欢
电机与控制学报(2022年6期)2022-07-15
中国特种设备安全(2022年1期)2022-04-26
防爆电机(2022年2期)2022-04-26
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
北京航空航天大学学报(2017年6期)2017-11-23
通信电源技术(2016年1期)2016-04-16
