
基于伺服关节用三维压力传感器的设计研究
2017-03-09 07:30何洪军刘福强马传宝袁德宇张东宁
微特电机 2017年1期
何洪军,刘福强,马传宝,袁德宇,张东宁
(中国电子科技集团公司第二十一研究所,上海 200233)
基于伺服关节用三维压力传感器的设计研究
何洪军,刘福强,马传宝,袁德宇,张东宁
(中国电子科技集团公司第二十一研究所,上海 200233)
机器人智能化最重要的是关节智能化,关节智能化取决于伺服关节用三维传感器的灵敏度和精度。针对伺服关节用三维力传感器,开展了基于伺服关节用三维压力传感器的结构设计、应力分析、三维压力传感器的输入输出特性曲线及传感器的标定研究,通过分析可知所设计的三维传感器耦合效应小,可以用于伺服关节的力/力矩测量和相应的实验测试,对机器人智能化关节技术的发展提供了一定的参考。
伺服关节;智能化;结构;传感器;力
0 引 言
机器人智能化的发展主要是关节智能化的发展,而关节模块的构成主要是伺服电机、控制器、力传感器和减速器等部件组成[1-3]。但这些部件中可使机器人具有感知的是伺服关节用传感器。目前,无论是大型搬运机器人伺服关节还是小型行走机器人伺服关节的单向压力测量、旋转压力测量、双向压力测量还是三向压力测量绝大都是应变式压力传感器完成的[4]。关于测量伺服关节的单向和双向压力的传感器目前很多,但是对于测试三维力的传感器很少。现在已有的三维压力传感器由于没有在结构上考虑解耦,因而采集出的信号极为不准确[5]。因此,现有的三维压力传感器很少在工程上和实验上应用。伺服关节在测试三维力时不仅要考虑将水平面方向的力测试准确且要保证轴间作用力的耦合效应小,同时还要保证在测试垂直于水平方向的力时不受水平力的干扰[6],因而对于传感器结构设计提出了更高的要求。因此,本文开展了基于机器人伺服关节用三维压力传感器的结构设计、应力分析并对传感器的输出特性和标定做了实验研究。实验结果表明所设计的三维传感器耦合效应小,可以用于机器人伺服关节的力/力矩测量和相应的实验测试。
1 传感器工作原理
针对机器人伺服关节力/力矩信息检测方法和原理很多,如利用压电效应、磁电效应及电容效应等方式,而本文所设计的三维传感器采用的是方法是应变片电测技术法[7]。
采用应变片电测法可以获得力矩和力的信息,通常是要经过4个阶段结束传感器受到的力、核算力矩的相当力和力矩信号的传输。
(1) 外力——弹性变形
如果外力作用于传感器时,置于内部的弹性体将会产生相应的变形,所受到的外力同弹性体上的变形有一定的比例关系。如果置于传感器内部的应变片尺寸结构确定,则传感器的变形量仅与所受外力有关,则可表示:
(1)
式中:ε为弹性体随外力而发生的变形量;F为所受外力。
(2) 弹性变形——弹性体电阻值的改变量
由于置于传感器内部的弹性体产生变形,则弹性体表面处粘贴的应变片同样会产生一样的变形,可能由于粘接剂的因素,两者产生的变形会有很小的差别。因为置于弹性体上的应变片产生的变形与产生的电阻变化量成比例关系,所以其电阻会有一定的变化量。两者之间的关系叫灵敏度系数:
(2)
式中:Gf为灵敏度系数;R为应变片原始电阻值;L为电阻丝原长;ΔL为电阻丝的长度;ΔR为电阻变化量。则对应的电阻变化量可写为:
(3)
在工程测试中,传感器的灵敏度与线性度必须都要考虑,需确保所设计的弹性体在比例极限下进行作业。通常规定1 000微应变是弹性体变化的极限,为了保证得到的应变片电阻变化量不大于0.002 R,在此灵敏度假定是2,得到的电阻值为300Ω,则产生的电阻量最大为0.7Ω,所以还要进行处理和放大这么微小的变化值。
(3) 阻值变化量——输出电压
一般传感器内置的应变体电阻变化量很小,因而测量其输出的信号同样微小,所以要采用相关电路对微弱信号进行处理,进而在对所得信息采取下一步处理。关于应变电测技术法通常有惠更斯电桥和电位计电路。惠更斯电桥比较普遍采用,电位计电路测试法只在测量动态量等特殊情况时使用。
(4) 输出电压——输出力矩/力信息
为了测量三维力矩及三维力,通常在传感器的弹性体上布置多对应变片,且布置的应变片对数多于维数,通常可用矩阵来表示传感器各维应变量和所受力的关系:
S=TF
(4)

当需用传感器进行测量时,为了得到测试数据,可以采用所测试到的多组应变组的输出值,再通过相应的解耦,进而获得非耦合检测矩阵,则传感器测到的力矩/力信息可表示:
(5)
2 三维传感器结构设计
本文所设计的机器人伺服关节用三维传感器的弹性体采用单层E型膜片结构,上下两端均采用4个M3的螺纹安装,弹性体采用LY12加工,其弹性体结构和整体结构如图1所示。
本文所设计的三维力传感器最大量程为-50~50kg,为了验证所设计传感器各维满足最大应力要求,所设计的三维传感器根据不同轴向的受力,本文给出了相应的仿真分析结果。
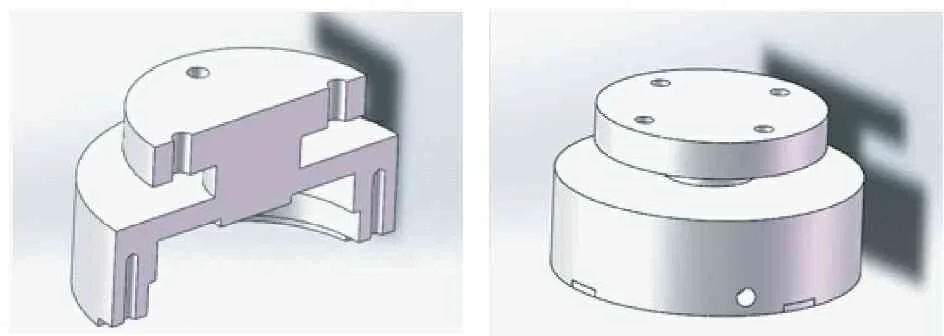
图1 三维传感器的结构图
(1) 对传感器施加FY=490N,力的施加方式和传感器变形如图2所示。
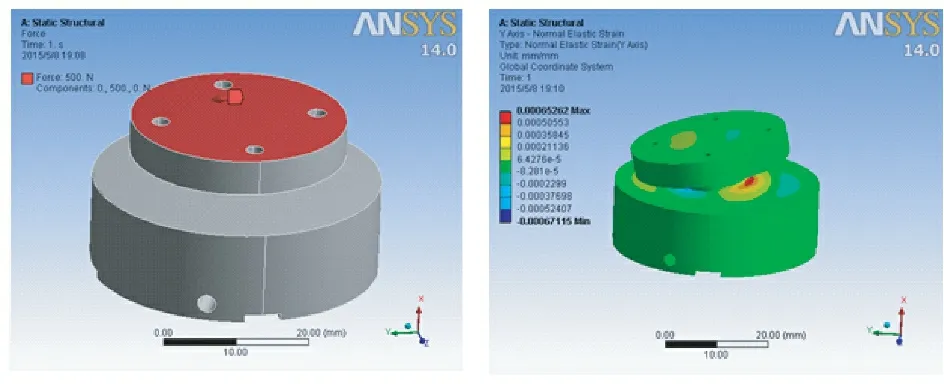
图2 施加FY=490N负载总体变形示意图
(2) 对传感器施加FZ=490N,力的施加方式和传感器变形如图3所示。
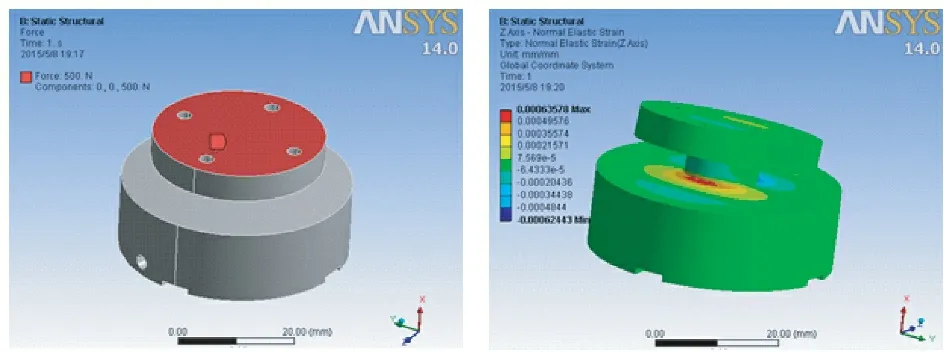
图3 施加FZ=490N负载总体变形示意图
(3) 对传感器施加FX=490N,力的施加方式和传感器变形如图4所示。
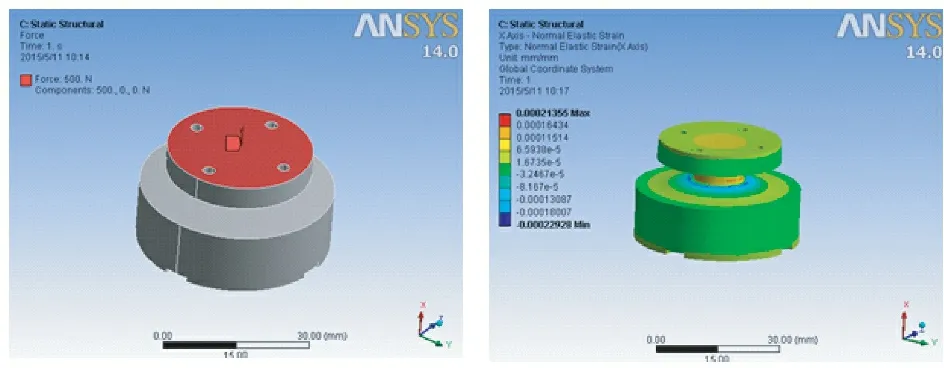
图4 施加FX=490N负载总体变形示意图
通过上面3组各向最大受载变形可以得知,各维最大应变均满足设计要求,可以适用于测试伺服关节受力为490N范围内的应力测量。
3 传感器特性分析
3.1 输入输出特性分析
为了测试所设计三维传感器的精度和灵敏度,本文开展了传感器的输入输出特性、传感器标定特性研究。根据搭建的输入输出特性测试平台,分别测量了10组不同压力下所得的电压信号,并对其进行拟合,所得到的输入输出特性曲线如图5~图7所示。
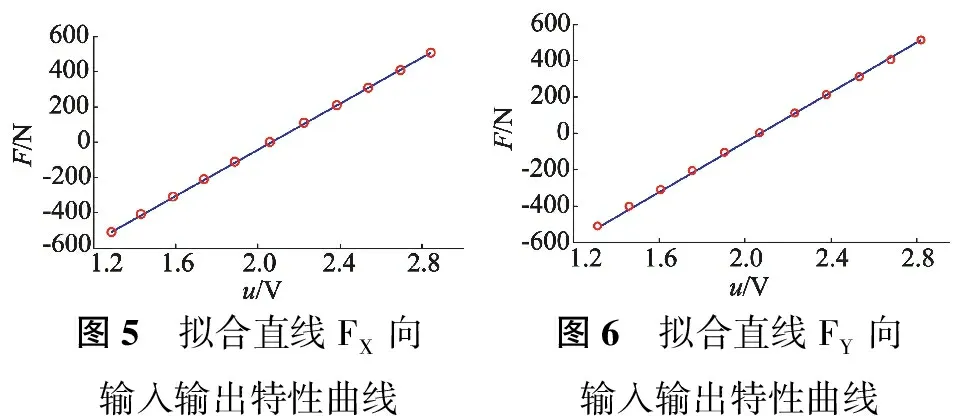
图5 拟合直线FX向输入输出特性曲线图6 拟合直线FY向输入输出特性曲线
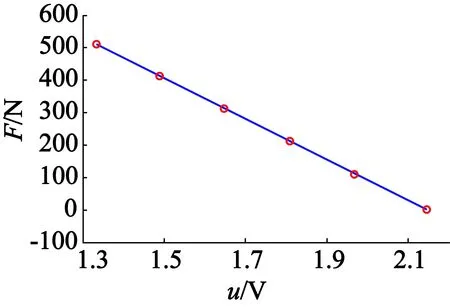
图7 拟合直线FZ向输入输出特性曲线
从3个方向的输如输出特性测试点及拟合曲线可以看出,所得设计的三维传感器的线性度很好,可用于测量量程范围内的压力值,其非线性影响几乎没有,准确度和精度可以得到相应的保障。
3.2 传感器标定
传感器使用前往往需要通过标定才能进行测量和相应的实验,标定的目的是将传感器所测力范围与一定范围的电压变化相对应,本文通过对所设计的伺服关节用三维压力传感器在一定的时间段加载相应的力,得到相应的时间力曲线,完成对伺服关节用三维传感器的标定。通过3组标定曲线(如图8~图10)可以得知,标定数据成规律性出现,具有很好的重复性,说明三维传感器具有很好的重复性能。
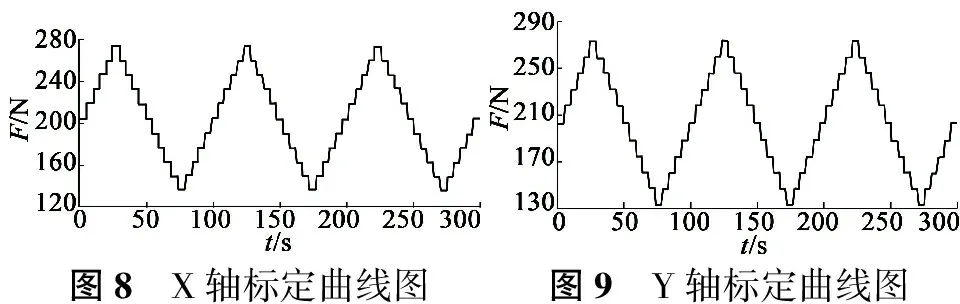
图8 X轴标定曲线图图9 Y轴标定曲线图
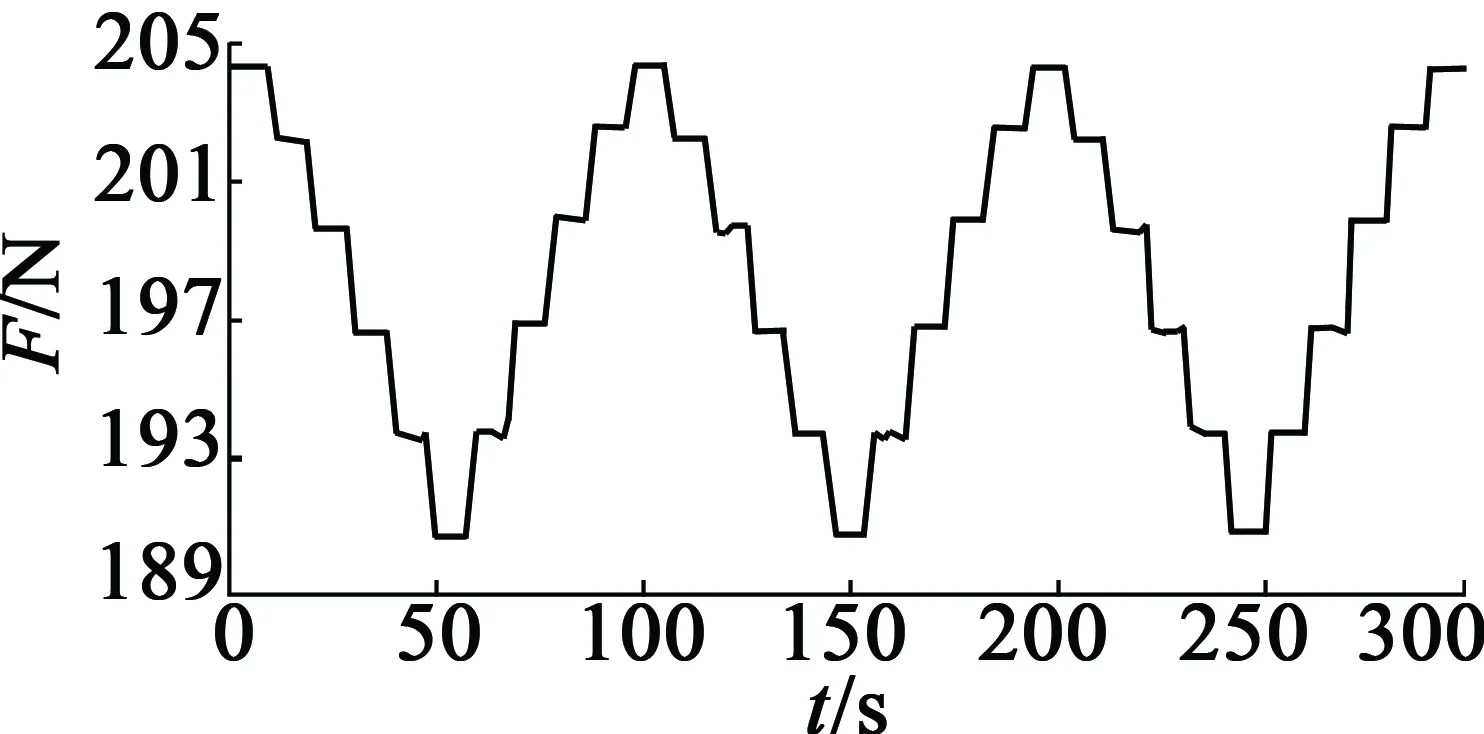
图10 Z轴标定曲线图
4 结 语
本文针对机器人伺服关节用三维力传感器,不仅设计了考虑将水平面方向的力测试准确且要保证轴间作用力的耦合效应小,同时还要保证在测试垂直于水平方向的力时不受水平力的干扰的三维传感器的结构。本文开展了基于机器人伺服关节用三维压力传感器的结构设计、应力分析并对传感器的输出特性和标定做了实验研究。通过应力仿真、三维压力传感器的输入输出特性曲线及传感器的标定研究可以得知,本文所设计的三维传感器耦合效应小,可以用于机器人伺服关节的力/力矩测量和相应的实验测试,对智能化机器人伺服关节力采样的研究提供了一定的技术参考。
[1] 夏勇.压阻式压力传感器温度补偿研究与实现[D].西安:西北工业大学,2006.
[2] 孙帅涛.基于BP网络的压力传感器的智能化研究与设计[D].西安:西安理工大学,2010.
[3] 孙以材,刘玉岭,孟庆浩.压力传感器的设计、制造与应用[M].北京:冶金工业出版社,2000:369-381.
[4] 周敏浩,钱政.智能传感技术与系统[M].北京:北京航空航天大学出版社,2008:14-17.
[5]MATROUFD,VERDETF,ROUVIERM,etal.ModelingnuisancevariablewithfactoranalysisforGMM-basedaudiopatternclassification[J].ComputerSpeechandlanguage,2011,25(3):481-498.
[6 ]ABOYEVRH.Fuzzywaveletneuralnetworkforpredictionofelectricityconsumption[J].ArtificialIntelligenceforEngineeringDesign,Analysisandmanufacturing,2009,23(2):109-118.
[7] 梁桥康.特殊应用的多维力/力矩传感器研究与应用[D].合肥:中国科学技术大学,2010.
ResearchandDesignofThree-dimensionalPressureSensorBasedontheServoJoint
HE Hong-jun,LIU Fu-qiang,MA Chuan-bao,YUAN De-yu,ZHANG Dong-ning
(No.21ResearchInstituteofCETC,Shanghai200233,China)
Thekeytorobotintelligenceisjointintelligence.Intelligentjointdependsonsensitivityandaccuracyofthethree-dimensionalpressuresensor.Theresearchdiscussedthestructure,stresssimulation,inputandoutputcharacteristicsandcalibrationofthree-dimensionalpressuresensorbasedontheservojoint.Theconclusioncanbeobtainedthatthree-dimensionalpressuresensordesignedhasasmallcouplingeffectanditcanbeappliedtomeasureforce,torqueandthecorrespondingexperiments.Thispaperprovidesareferencefordevelopmentofintelligentjointtechnology.
servojoint;intelligent;structure;sensor;force
2016-07-15
TM
A
1004-7018(2017)01-0041-03
何洪军, 博士研究生,主要从事机器人整机设计、机器人控制系统设计、伺服关节驱动设计等。
猜你喜欢
中国特种设备安全(2022年2期)2022-07-08
弹性体(2021年6期)2021-02-14
汽车维修与保养(2020年11期)2020-06-09
中国惯性技术学报(2017年1期)2017-06-09
山东青年(2016年12期)2017-03-02
航天制造技术(2016年6期)2016-05-09
探测与控制学报(2015年4期)2015-12-15
橡胶工业(2015年3期)2015-07-29
噪声与振动控制(2015年4期)2015-01-01
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10
