
轮毂电机中的速度控制技术研究
2017-03-07 10:16刘开文孙福佳
电子科技 2017年2期
刘开文,钱 炜,孙福佳
(上海理工大学 机械工程学院,上海200093)
轮毂电机中的速度控制技术研究
刘开文,钱 炜,孙福佳
(上海理工大学 机械工程学院,上海200093)
介绍了轮毂电机的控制原理,正弦脉宽调制和空间矢量脉宽调制算法,并建立了基于这两种算法的轮毂电机控制系统的Matlab仿真模型,且对模型运行结果进行分析。分析结果表明,在同样条件下, 采用 SVPWM 算法仿真系统到达稳态所需时间小于采用SPWM 算法仿真系统,SVPWM方案不仅提高了逆变器的直流电压利用率,还减小了转矩脉动。在轮毂电机控制系统中SVPWM是更理想的选择。
正弦脉宽调制;空间矢量脉宽调制;轮毂电机
轮毂电机就是将动力、传动和制动装置都整合到轮毂内部的电机,目前许多新能源汽车都在使用轮毂电机作为主要驱动。与传统的电机驱动技术相比,轮毂电机技术具有很定的优势。首先,其结构更为紧凑、布局灵活,无需复杂的机械传动系统,大幅简化了汽车由于轮毂电机可以减小驱动空间,内部结构同时增加了车内空间;其次,轮毂电机具有单车轮独立驱动的特性,因为,容易实现前驱、后驱甚至全四驱驱动形式。所以,新能源汽车大多采用轮毂电机作为主要驱动力[1]。
1 轮毂电机控制方式简介
目前轮毂电机的主要调速方式是变频调速,即通过三相逆变器调节电枢绕组两端电压的方式,来达到来达到控制和调节轮毂电机的转速和转矩的目的。三相逆变器供电轮毂电机连接原理图[2]如图1所示,S11S21S31S12S22S32为6个IGBT组成的逆变桥,它们分别被a,b,c和a′,b′,c′这 6个脉冲所控制。当逆变桥上半部分的 IGBT开通时 , 其下半部分相对应的 IGBT应被关闭,即a,b或c为 1时 ,则a′,b′和c′为 0。U,V和W分别为轮毂电机的定子三相绕组 。在 6个 PWM脉冲的控制下, IGBT逆变桥将直流电压输入逆变为三相交流信号, 驱动 PMSM进行运转。
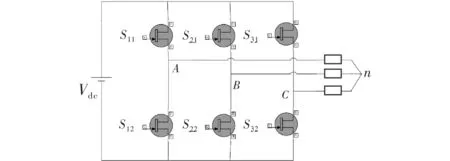
图1 三相逆变器
变频调速系统中的关键技术是脉宽调制(Pulse Width Modulation,PWM),常用的PWM 技术主要有基于正弦波对三角波脉宽调制的 SPWM(Sinusoidal Pulse Width Modulation) 技术和基于电压空间矢量(Space Vector)的 SVPWM技术等。
2.1 正弦脉宽调制
SPWM以正弦电压作为逆变器的期望输出波形,以比正弦波频率高的多的等腰三角形作为载波(Carrier Wave),并用频率和期望输出频率相同的正弦波作为调制波[3](Modulation Wave)。调制波与载波相交时会产生一系列的交汇点,由这些交汇点确定逆变器开关器件的通断时刻,即正弦调制波VT大于三角载波Va时,上桥臂的开关管导通,下管关断,具体通断条件如下:
当VT>Va时,S11导通,S12关断;
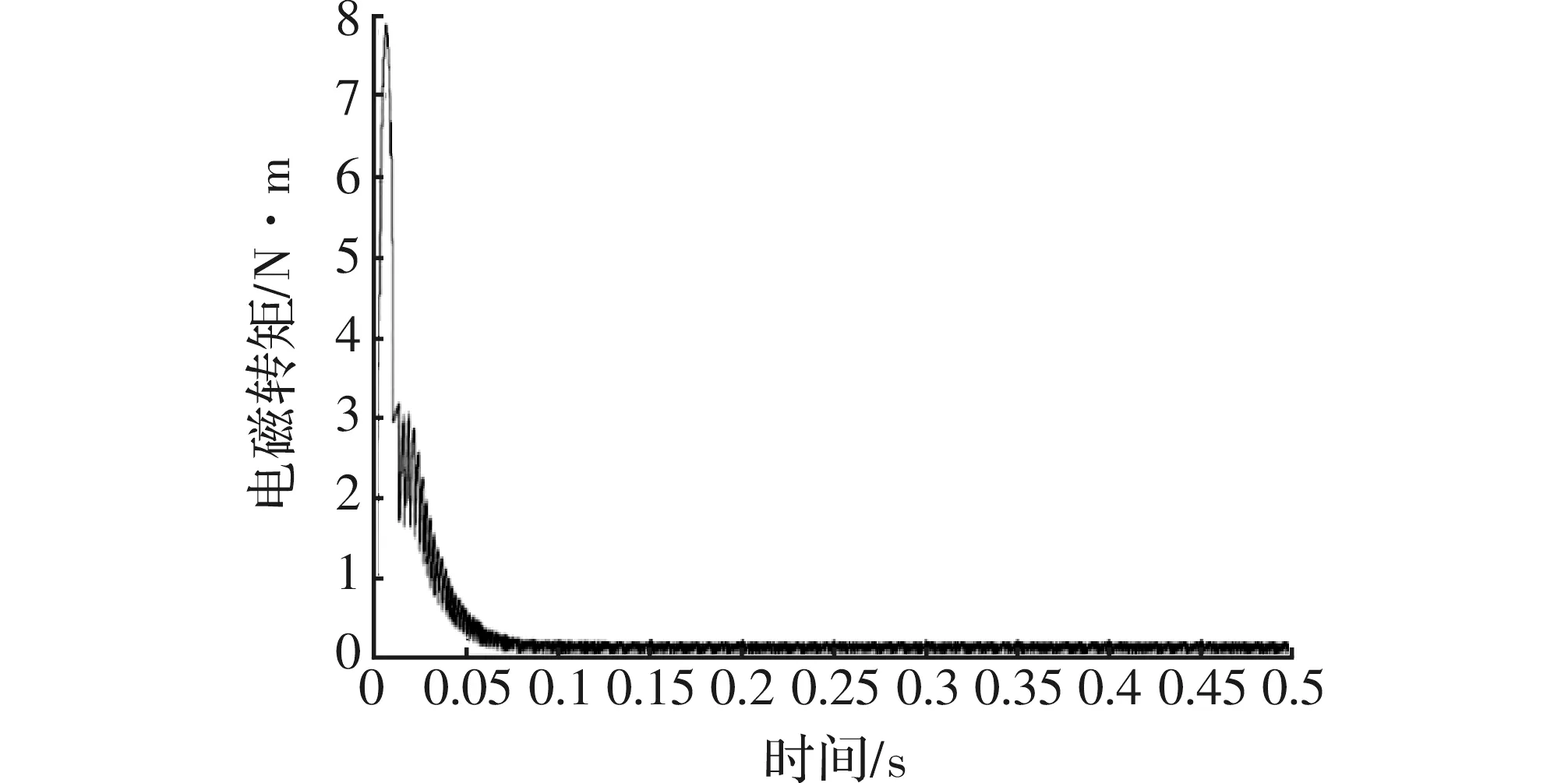
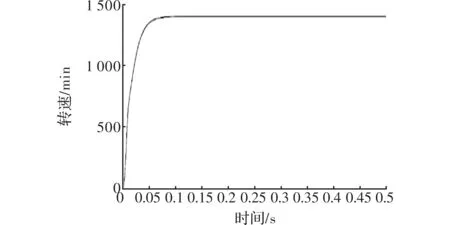
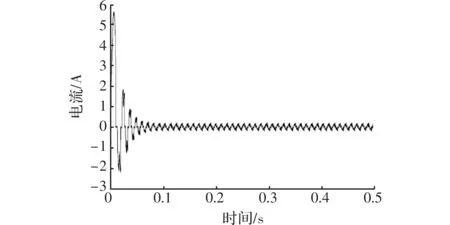
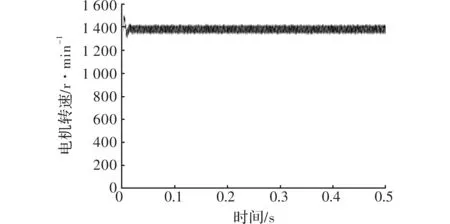
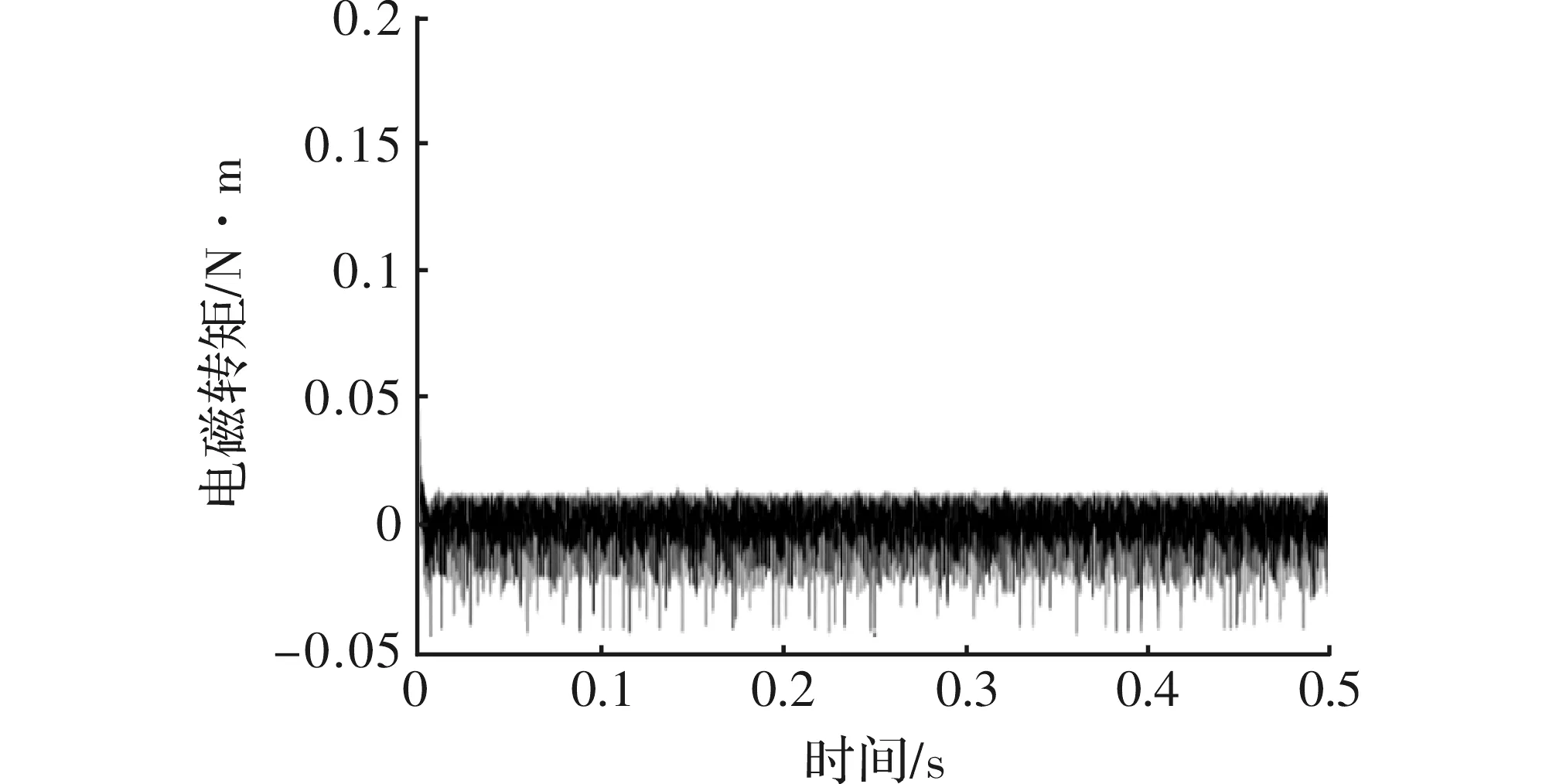
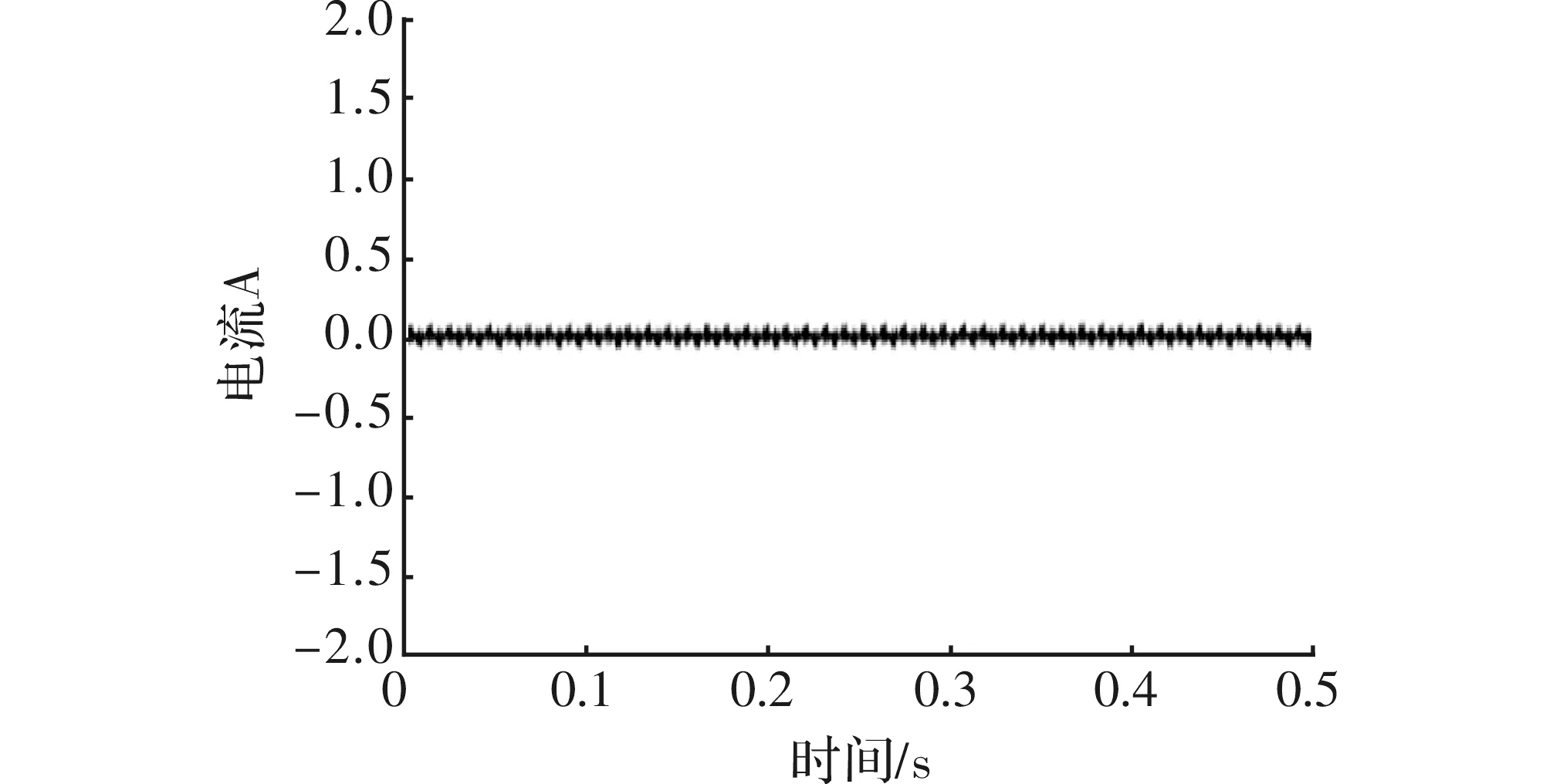
当VT 当VT>Vb时,S21导通,S22关断; 当VT 当VT>Vc时,S31导通,S31关断; 当VT 由此可以获得在正弦调制波半个周期内呈现两边窄中间宽的一系列等幅不等宽的矩形波,进而控制输出电压控制电机的转速[4]。 2.2 空间矢量脉宽调制 空间矢量脉宽调制(Space Vector Pulse-Width Modulation,SVPWM)具有输出波形好,电压利用率高等优点,广泛应用于逆变器控制器和三相电力系统等领域中[5]。 当定子三相电压为对称的正弦电压时,则定子电压空间矢量方程 (1) 方程定义的是一个幅值与相电压相等的空间矢量,矢量端点的运动轨迹是一个圆,运动角度为相电压的电角频率。 逆变器在六拍运行时,每个60°切换一次,一周内有8种开关状态每一种开关状态输出合成电压空间矢量分别记为V0~V7,与之相对应的电压空间矢量如图2所示。 图2 电压空间矢量 基于Matlab软件对控制系统分别使用 SVPWM 、SPWM 方法建立的轮毂电机控制系统仿真模[6-7]。SVPWM 、SPWM 脉冲均采用单极性方式 , 两系统在速度 (400 rad/s)、负载(10 N·m)、载波频率(10 kHz)、和 PI 调节参数均相同的条件下进行仿真[8-12],电机仿真参数选取为:电磁转矩Te=0.8 N·m;额定电压Udc=300 V;电机最高转速ωm=3 000 r/m。 3.1 正弦脉宽调制技术(SPWM)仿真结果 图3 电磁转矩随时间的变化 图4 速度响应 图5 定子相电流 3.2 SVPWM空间矢量脉宽调制技术仿真结果 图6 电磁转矩随时间的变化 图7 速度响应 图8 定子相电流 3.3 仿真结果分析 (1)从图3和图6可看出,采用 SPWM 算法时电机启动转矩稍大,但转矩脉动小于采用 SPWM 算法;(2)由图4和图7可知,基于SVPWM算法的系统速度响应时间要比基于SPWM算法的系统响应时间短;(4)由图5和图8得知,采用SVPWM算法控制轮毂电机定子绕组电流总谐波失真,远小于采用SPWM建立的模型[13-14]。 本文介绍了 SPWM和 SVPWM算法 , 及以 轮毂电机为对象建立的仿真模型, 并对两种模型运行结果进行了比较分析。结果表明:采用 SVPWM算法建立的轮毂电机控制系统定子电流总谐波失真远小于采用 SPWM建立的模型。且 SPWM易于采用模拟硬件电路实现,而 SVPWM更适合于数字化控制系统,以微控制器为核心的数字化控制系统是今后发展的趋势,所以在轮毂电机数字控制系统中 SVPWM应是优先的选择。 [1] 周卫平,吴正国,唐劲松,等.SVPWM的等效算法及 SVP WM与 SPWM的本质联系[J].中国电机工程学报,2006,26(2):133-136. [2] 李茜元.轮毂式永磁同步电机驱动控制器的研制[D].哈尔滨:哈尔滨工业大学,2012. [3] 张燕宾.SPWM变频调速应用技术[M].4版.北京:机械工业出版社,2012. [4] 汪立伟.电动车用永磁无刷直流电机正弦波控制的研究[D].辽宁:辽宁工业大学,2015. [5] 曾允文.变频调速SVPWM技术的原理、算法与应用[M].北京:机械工业出版社,2011. [6] 求是科技.Matlab7.0从入门到精通[M] .北京:人民邮电出版社,2006. [7] 孙屹.Simulink通信仿真开发手册[M].北京:国防工业出版社,2004. [8] 王正林,郭阳宽.Matlab/Simulink与过程控制系统仿真[M].北京:电子工业出版社,2012. [9] 邵群涛,徐余法.电机与拖动基础[M].北京:机械工业出版社,2002. [10] 张崇巍.PWM 整流器及其控制[M].北京:机械工业出版社,2003. [11] 马建伟,李银伢.满意PID控制设计理论与方法[M].北京:科学出版社,2007. [12] 袁登科,陶生桂.交流永磁电机变频调速系统[M].北京:机械工业出版社,2011. [13] 李茜元.轮毂式永磁同步电机驱动控制器的研制[D].哈尔滨:哈尔滨工业大学,2012. [14] 王杨.分布式驱动电动汽车轮毂电机驱动控制器的研究[D].吉林:吉林大学,2015. Research on Hub Motor Speed Control LIU Kaiwen,QIAN Wei,SUN Fujia (School of Mechanical Engineering, University of Shanghai for Science and Technology, Shanghai 200093, China) The basic idea, implementation principle as well as modulation function of the space vector pwm (SVPWM) and SPWM are presented. Simulation results show that under the same conditions, the time it takes for the system to reach the stable state by the SVPWM algorithm is less than that by the SPWM. The SVPWM algorithm improves the utilization rate of dc voltage of inverter and reduces the torque ripple, thus a better candidate for the wheel hub motor control system. spwm; svpwm; hub motor 2016- 04- 01 刘开文(1989-),男,硕士研究生。研究方向:机器人控制。 10.16180/j.cnki.issn1007-7820.2017.02.016 TN787 A 1007-7820(2017)02-062-03
3 轮毂电机仿真及结果
4 结束语
猜你喜欢
新高考·高三数学(2022年3期)2022-04-28汽车实用技术(2022年5期)2022-04-02上海涂料(2021年5期)2022-01-15内蒙古电力技术(2021年5期)2021-11-21莆田学院学报(2021年5期)2021-11-13甘肃科技(2020年20期)2020-04-13中学生数理化·高一版(2018年6期)2018-07-09制造技术与机床(2017年10期)2017-11-28理科考试研究·高中(2017年7期)2017-11-04制造业自动化(2017年2期)2017-03-20
