基于涡流导引的潜射鱼雷反潜命中效能分析
2017-03-03 01:09穆连运
舰船电子工程 2017年2期
武 宁 穆连运 李 伟
(海军潜艇学院 青岛 266000)
基于涡流导引的潜射鱼雷反潜命中效能分析
武 宁 穆连运 李 伟
(海军潜艇学院 青岛 266000)
分析了基于涡流导引的鱼雷反潜作战的基本特征,建立了鱼雷攻击命中模型,通过仿真计算,获得了涡流导引的潜射鱼雷命中效能,研究得出相较于传统导引方式,涡流导引鱼雷具有更广的攻击角度和更好的命中稳定性。
涡流检测; 导引; 鱼雷; 效能
Class Number V279
1 引言
鱼雷是潜艇实施反潜作战的主要武器,其导引距离是决定其反潜能力的重要因素之一。目前,鱼雷反潜主要采用声学导引,即利用主、被动声呐探测,发现目标后攻击目标[1]。该导引方式易受声信号传播特性和目标特性的影响,导引距离受到很大限制,而且易受各种人工或自然假目标的干扰。因此需要寻求新的导引技术和实现途径。随着海洋物理理论和海洋探测技术的发展,涡流导引技术已经由理论研究向实际应用发展,利用其探测距离远、抗干扰能力强的优势,可有效提高鱼雷导引距离,提升作战性能。本文旨在研究基于涡流导引的潜射鱼雷反潜命中效能,探索提升鱼雷反潜作战能力的新途径。
2 涡流导引的反潜作战概述
2.1 基本概念
潜艇在分层流体中运动时,艇体将巨大的动能传递给周围的水介质,水介质与艇体的相互作用,导致艇体周围形成绕艇体流动的涡流[2]。这种涡流尺度有数公里之巨,其衰减需要几天时间,可延伸至上百海里[3]。基于涡流检测技术导引的潜射鱼雷反潜作战是指发射平台利用专门设备探测跟踪这种声异常涡流并导引涡流自导鱼雷攻击目标的一种作战方式。
2.2 技术优势
与常用的水下导引方式——声学导引相比,采用涡流导引拥有诸多优势,突出体现在以下两点:
1) 探测距离远
潜艇涡流尺度主要受海水的Brunt-Vaisala周期T决定(海洋中的量级为4×10-2S-1)[4],在水下滞留时间以天计算。长时间滞留,保持了潜艇后方尾流的连续性,这样就可探测潜艇艇尾几十甚至上百海里的涡流。
2) 受海洋环境影响小
潜艇涡流是艇体与水介质的相互作用而成,所形成的物理场不容易模拟实现,其受海面海况及海洋环境影响较小,因此,涡流导引方式抗干扰能力相对较强。
2.3 技术局限
1) 由于涡流位于航行潜艇的尾部延展区域,因此,涡流导引鱼雷攻潜必须从目标的后部进行,无法迎击和截击目标。
2) 目前,涡流探测无法进行敌我目标识别,因此,在多艇配合反潜时,必须明确分配反潜阵地和搜索路径。
3 涡流导引鱼雷命中效能分析
3.1 模型建立
假定在指定的作战海域,反潜方潜艇搭载涡流导引装置,使用涡流自导鱼雷实施反潜作战。潜艇采取规则机动方法进行涡流反潜侦查,探测到目标方位后,通过解算目标信息获得目标运动要素,采取适当的方式,迅速机动占领有利发射阵位,实施鱼雷攻击。为了保证鱼雷涡流自导装置有效地检测到目标涡流,指控系统预先计算及输出设定的鱼雷射击诸元时必须保证鱼雷进入目标涡流的预定点在目标的有效涡流范围内。
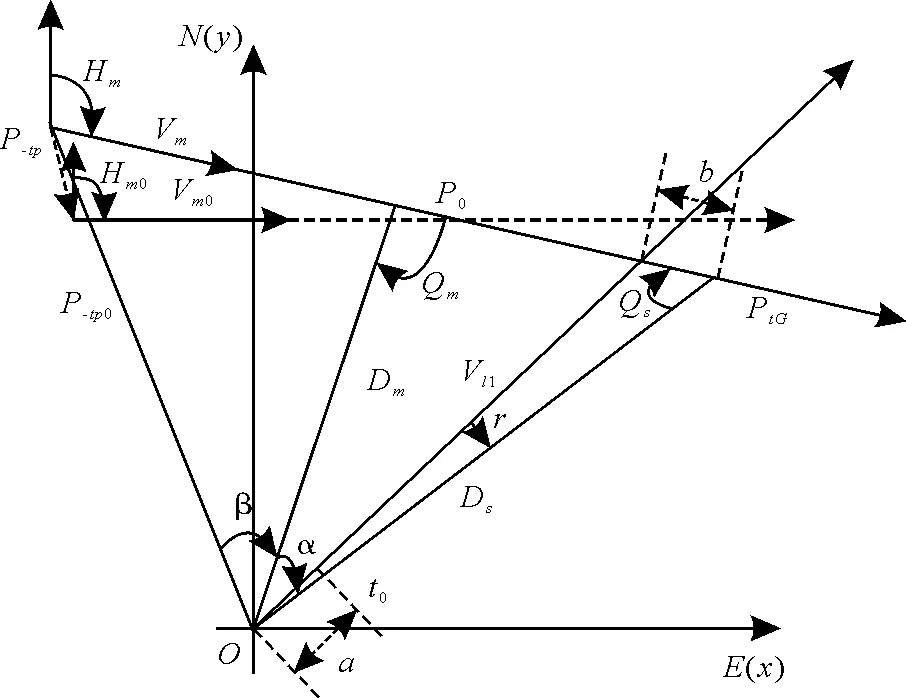
图1 反潜作战双方相对位置图
如图1,潜艇获得的目标信息是-tp之前的目标位置与运动要素信息,即获得-tp时刻目标观测值位于P-tp点,距离D2。根据本艇经纬度坐标,可以得到-tp时刻目标与潜艇之间的方位距离,将P-tp点转化为平面直角坐标系上的(X2,Y2)点。潜艇指控系统通过连续接收目标信息,对目标建立航迹,计算出目标航向Hm,目标速度Vm。则经tp后,目标航行至P0(X1,Y1)点,即0时刻目标与潜艇之间的距离为Dm,舷角为Qm。以潜艇0时刻的位置点为原点O,正北方向为N(y)轴,正东方向为E(x)轴,建立直角坐标系。此时潜艇发射鱼雷,设瞄准点S为目标有效涡流长度中距目标艇尾某一距离处,b为S到目标艇尾的距离。鱼雷直航段速度Vl1,鱼雷出管直航距离,鱼雷出管直航时间t0,鱼雷最大航程Smax。鱼雷射击参数根据所提供的目标指示信息进行计算,鱼雷射击有利提前角为a。
由于目标位置信息与运动要素信息存在误差,假设-tp时刻目标的真实位置点位于P-tp0(X20,Y20)点,目标的真实航向Hm0,目标的真实速度Vm0,经tp后,目标航行至P00(X10,Y10)点,目标与潜艇之间的距离为Dmo,目标舷角为Qmo,目标速度误差为0均值正态分布随机误差的均分差σvm,目标航向误差为0均值正态分布随机误差的均分差σHm,目标初始经纬度为0均值正态分布随机误差的均分差(σλD,σφD),鱼雷直航时航向误差为0均值正态分布随机误差的均分差σHl,鱼雷直航时速度误差为0均值正态分布随机误差的均分差σVl。
本文假定目标定速定向直航,在图1中,根据远程目标指示系统提供的观测目标信息,目标以速度Vm沿Hm航向做直航运动,其任一时刻ti观测目标的位置点为
(1)
式中:
(2)
由此可以求出0时刻观测目标的位置点、观测目标与潜艇的距离及观测目标所处潜艇舷角,见式(3)~(5)。
(3)
(4)
(5)
由于目标指示信息存在误差,-tp时刻目标真实位置位于P-tp0(X20,Y20)点,目标以真实速度Vm0沿Hm0航向做直航运动,其任一时刻ti目标的真实位置点为
(6)
式中:X20=X2+ΔXm,Y20=Y2+ΔYm,Hm0=Hm+ΔHm,Vm0=Vm+ΔVm。
由此可以求出0时刻真实目标的位置点、真实目标与潜艇的距离及真实目标所处潜艇舷角,见式(7)~(9)。
(7)
(8)
Qm0=Q20+β
(9)
假设,涡流自导鱼雷有效涡流探测距离1h×目标航速。
见图1,0时刻鱼雷位于原点,鱼雷出管后惯性直航,航行了距离a,于t0时刻位于T0点,然后以Vl1速度沿方向Hl直航运动,则此后的任一时刻ti鱼雷的位置坐标为
(10)
式中:
(11)
由正弦定理可得
(12)
则
(13)
式中α为鱼雷射击有利提前角。
鱼雷进行涡流自导航行时,鱼雷涡流自导弹道基本类似于振幅递减阻尼振荡曲线,终止于鱼雷命中目标或鱼雷航程终了或鱼雷丢失目标涡流。因此,鱼雷沿目标涡流自导追踪时在目标尾流航向上的投影速度将是一个复杂的递增的变量。在满足不影响鱼雷追踪命中目标精度的前提下,按照涡流进入角大小不同,涡流自导段鱼雷速度损失为15%~20%。
因此,在鱼雷跟踪涡流直至命中目标的航程与航速的关系为
航行时间
t=La/2(k·Vl2-Vm)
(14)
鱼雷跟踪涡流航程
S2=Vl·t=La/2/(k·Vl2-Vm)·Vl
(15)
式(15)中La为涡流长度,k为鱼雷在目标航向上的速度损失,Vl2为鱼雷在涡流跟踪段速度,Vm为目标速度。
3.2 参数计算
1) 有利提前角计算
有利提前角的计算原则就是要使鱼雷与有效涡流和目标舰长度在内的有效长度中心相遇。据此,可以推导涡流自导鱼雷射击的有利提前角。
由正弦定理可得
(16)
相对于瞄准点S的等效初始射距为
(17)
又由
(18)
得
(19)
2) 鱼雷航迹与目标航向线相交时参数计算
鱼雷航迹与目标航线相交时鱼雷运动了t0+tG的时间
-2D20[Vmo(t0+tG+tp)-b]cosQ20
(20)
鱼雷航迹与目标航向线相交时鱼雷搜索弹道航程计算:
鱼雷搜索弹道航程
S1=a+tGVl1
(21)
鱼雷航迹与目标航向线相交时目标与鱼雷位置点计算:
相交时目标位置点
(22)
相交时鱼雷位置点
(23)
3) 鱼雷进入目标涡流判断
判断鱼雷航迹与目标航向线相交时鱼雷是否进入目标涡流
|XlG-XmG|<|XmG|+|La·sinHm|
(24)
4) 鱼雷涡流进入角计算
θ=Hl+π-Hm
(25)
式中:θ为鱼雷涡流进入角;Hl为鱼雷航向;Hm为目标航向。
5) 雷命中目标判断
鱼雷命中目标分为两种情况,一种情况是鱼雷经过搜索弹道后,以要求的涡流进入角进入目标涡流,然后经跟踪目标涡流弹道命中目标;另一种情况是鱼雷经过搜索弹道直接命中目标;两种情况都要求鱼雷走过的总航程小于它的最大航程。
其中由式(15)计算S2,由式(20)计算S1。
若鱼雷能同时满足以下三个条件,则鱼雷能够命中目标,否则为不能命中目标。
1)S1+S2≤Smax;
2) |XlG-XmG|<|XmG|+|La·sinHm|;
3) 30°≤θ≤150°。
3.3 仿真分析
取目标速度8kn,目标航向90°,潜艇与目标初始距离30km,信息传递老化时间1min,鱼雷航速36kn,涡流探测距离1h×目标航速,观察潜艇所处目标舷角Q(0°~180°)对鱼雷命中概率P的影响,见表1、2。
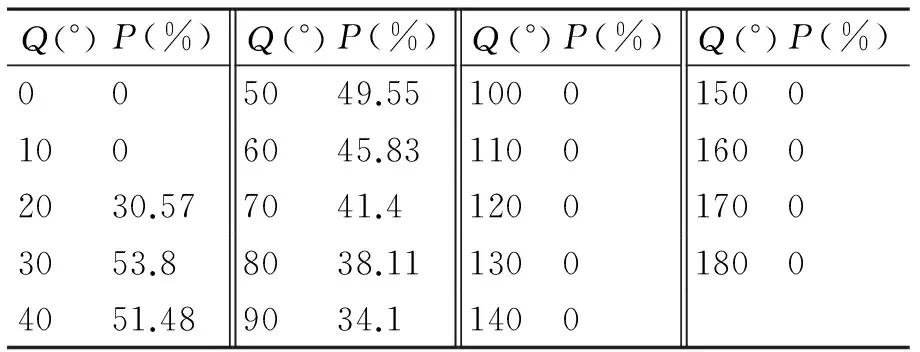
表1 目标舷角对尾流自导鱼雷命中概率影响
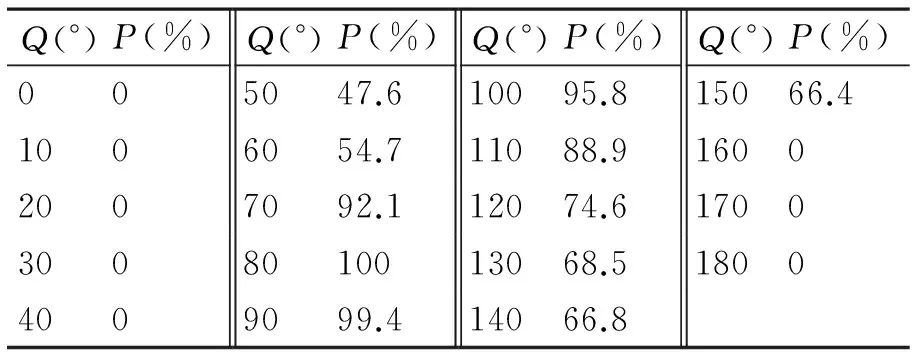
表2 目标舷角对涡流自导鱼雷命中概率影响
从表中可以看到,涡流自导鱼雷的命中概率舷角范围60°~170°,而尾流自导鱼雷命中概率舷角范围在20°~90°,可攻击范围大大增加。
取目标速度8kn,目标航向90°,观察潜艇所处目标舷角70°,信息传递老化时间1min,鱼雷航速36kn,涡流探测距离1h×目标航速,最大航程50km,潜艇与目标初始距离30km~50km对鱼雷命中概率P的影响,见表3。
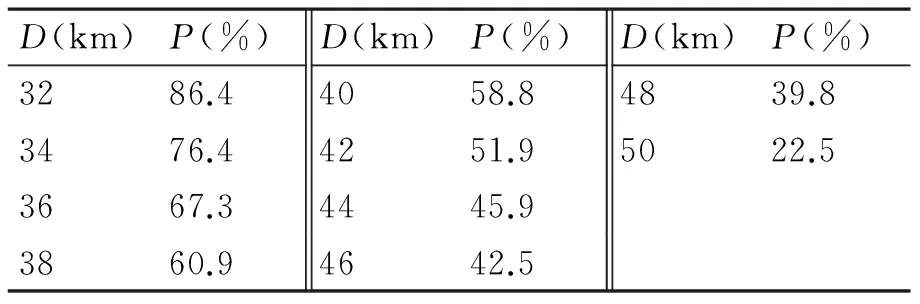
表3 不同发射距离对涡流自导鱼雷命中概率影响
与目标初始距离的增加,命中概率随着减小,初始距离从30km增加到50km,命中概率减小70%。
4 结语
本文对潜艇利用涡流检测技术导引鱼雷的攻潜的命中效能进行了研究,通过仿真计算表明涡流导引鱼雷反潜具有更广的攻击角度和更好的命中稳定性。根据这一结果,进一步探索研究运用涡流检测技术实施超远距离反潜作战的新方式,可为提高潜艇反潜能力提供新方向。
[1] 高永琪,刘洪,张毅.鱼雷制导体制的现状与发展趋势[J].舰船科学技术,2003(02):2-5.
[2] 张军,张效慈,赵峰,等.源于水动力学的潜艇尾迹非声探测技术研究之进展[J].船舶力学,2003,7(2):121-128.
[3] Lillberg E, Alin N, Fureby C. A computational study of wakes behind submarines and surface ships[J]. Defence research establishment weapons and protection division,2000:131-147.
[4] 张效慈,张军.潜艇内波波迹一航空猎潜的新对象[J].船舶力学,2007,11(4):508-513.
Hitting Efficiency Analysis of Submarine-launched Torpedo Based on Vortex Guidance
WU Ning MU Lianyun LI Wei
(Navy Submarine Academy, Qingdao 266000)
The basic characteristics of the torpedo anti submarine warfare are analyzed based on the guidance of vortex. And the model of torpedo attack and hit is established. The hitting efficiency of submarine-launched torpedo which guided by vortex is achieved by simulation calculation. Compared with the traditional guiding method, the torpedo based on vortex guidance has a wider angle of attack and better stability. And the conclusion has been proved in the research.
eddy current testing, guidance, torpedo, efficiency
2016年8月3日,
2016年9月27日
武宁,男,硕士研究生,研究方向:军事装备学。穆连运,男,硕士,教授,研究方向:水中兵器发射理论。李伟,男,博士,教授,研究方向:鱼雷制导工程。
V279
10.3969/j.issn.1672-9730.2017.02.025
猜你喜欢
小哥白尼(军事科学)(2022年1期)2022-04-26
小哥白尼(军事科学)(2021年8期)2021-11-22
智能计算机与应用(2021年5期)2021-10-05
文萃报·周二版(2019年46期)2019-09-10
舰船电子工程(2019年7期)2019-08-05
舰船电子对抗(2019年2期)2019-05-23
军事运筹与系统工程(2018年1期)2018-11-10
火力与指挥控制(2018年7期)2018-08-22
舰船电子工程(2017年8期)2017-09-04
无人机(2017年10期)2017-07-06