大变形柔体组件陈述式模型开发
2017-03-02 03:17:24苏少辉黄成毅
杭州电子科技大学学报(自然科学版) 2017年1期
徐 匡,苏少辉,黄成毅,陈 昌
(杭州电子科技大学 机械工程学院,浙江 杭州 310018)
大变形柔体组件陈述式模型开发
徐 匡,苏少辉,黄成毅,陈 昌
(杭州电子科技大学 机械工程学院,浙江 杭州 310018)
针对Modelica模型库只能提供刚体和小变形柔体两种组件模型,无法完全满足包含大变形柔性构件的机械系统模型构建的调用需求问题,基于相关动力学理论及绝对坐标法,采用陈述式建模方法在Dymola软件上开发了开放的、可重用的大变形柔体组件模型.通过正确调用、连接各组件构建大变形梁系统模型,使得Dymola能处理此类大变形柔性问题,为大变形柔性多体系统模型的构建提供基础知识件.对大变形悬臂梁进行了仿真和对比分析,验证了大变形柔体组件的正确性和实用性.
大变形柔体组件;陈述式建模;绝对坐标法;Modelica
0 引 言
Modelica是一种综合多种物理建模语言优势的全新陈述式建模语言,它基于组件思想,引入非因果连接机制和重用机制,以统一形式描述不同领域系统[1-2].Modelica拥有易于重用、扩充的模型库及描述简单、构建高效诸多优点[3].所以,基于Modelica的陈述式建模方法在现代工程中得到广泛的应用.在复杂机电产品设计过程中,为获取更为真实、精确的仿真结果,在仿真分析时一般都抽象为柔性多体系统[4-5].随着机电产品向高速化、轻型化发展,刚度低、阻尼弱的轻质柔性机构被广泛应用,柔性机构在高速、高载荷运动时,柔性变形愈加明显[6].出现大变形现象时,刚体和小变形柔性体模型已无法满足工程精度要求,因此需摒弃小变形假设,建立精确的大变形柔性体模型,以满足工程精度的要求[7-8].Modelica标准库只提供刚体及小变形柔体两种组件,因此用户需根据相应设计准则,自行开发参数化、模块化的可重用大变形柔体组件,以满足大变形柔性多体系统建模仿真的要求.
本文基于大变形柔性多体动力学理论,采用更能准确描述大变形、更利于编程的绝对坐标法构建大变形柔体组件数学模型,并根据组件设计准则,在Modelica/Dymola上开发参数化、模块化的大变形柔体组件,以大变形悬臂梁仿真模型为例,调用大变形柔体组件,进行仿真分析,验证柔体组件库的可行性.
1 柔体组件数学模型
针对大变形柔体组件,本文采用绝对坐标法构建数学模型.与基于小变形假设的浮动坐标法[9]相比,考虑了柔体组件大变形时的非线性问题.但由于构建的数学模型包含病态的大阶数Jacobbi系数矩阵,求解效率低.为弥补计算效率较低的缺点,本文通过降阶法合理简化数学模型,将任一点绝对坐标数缩减至4个,从而提高计算效率.进而利用虚功原理,推导出大变形柔体组件的动力学方程.
1.1 柔体组件的运动描述
采用有限单元法对大变形柔体组件进行离散,划分为若干个单元.通过2种参考坐标系(绝对坐标系O-xyz和固定在任意单元横截面上的浮动坐标系O0-x0y0z0)描述大变形柔体组件上任意点的位形,如图1所示.为避免受某些剪切量影响,采用Euler—Bernoulli假设,即切向与横截面垂直.
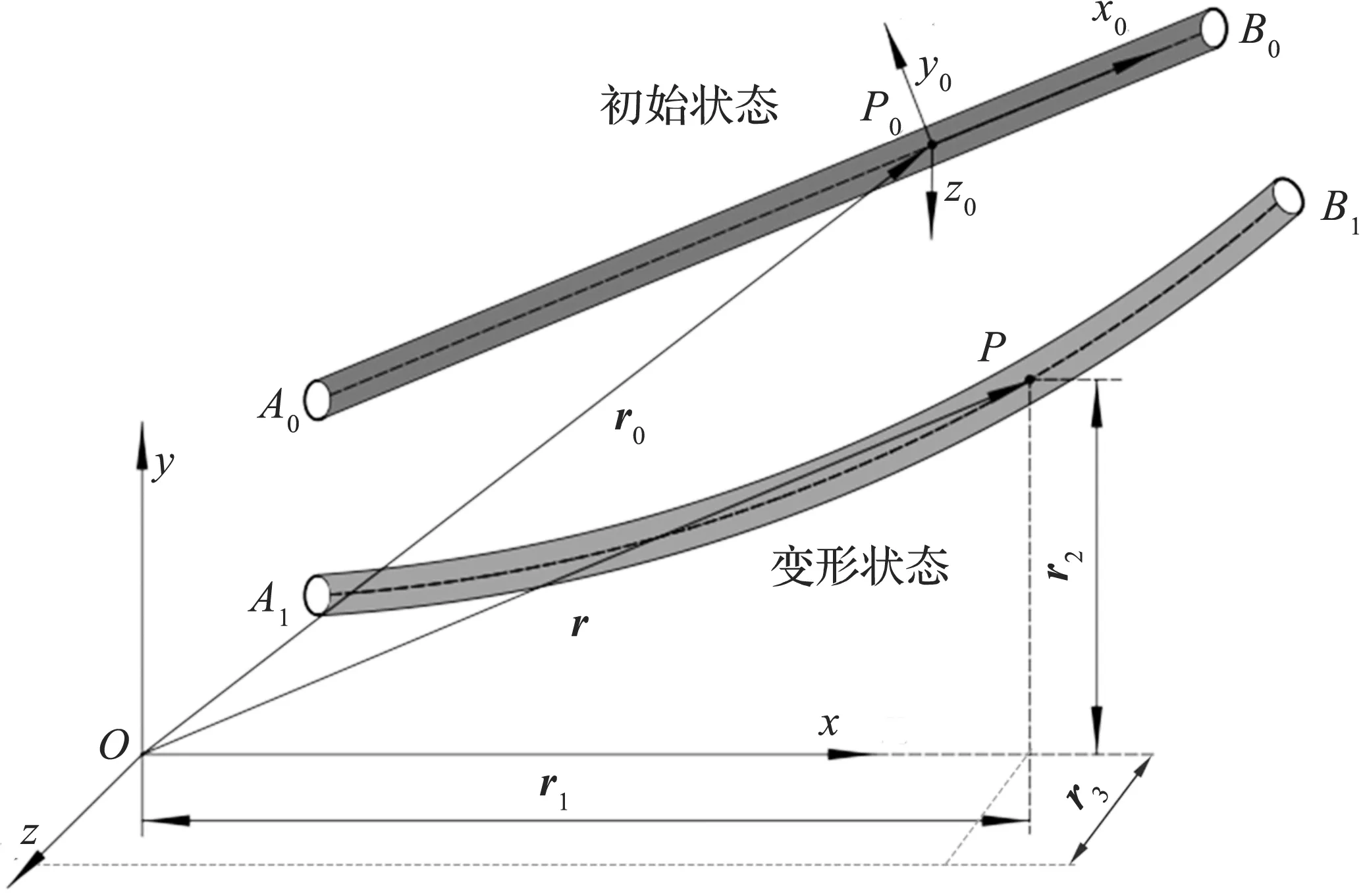
图1 变形前后的空间梁示意图
图1中,R为大变形柔体组件横截面任意点在坐标系O-xyz上的坐标矩阵,表示为:

(1)

(2)
其中,S(x)为组件形函数,pi(t)为单元节点各向绝对坐标矩阵.
基于单元节点切向与横截面法向重合的假设,组件单元横截面上各向应变简化为[6]:

γxy=γyx=zn′Tm,γxz=γzx=-yn′Tm.
(3)
1.2 柔体组件的广义力描述
广义力可根据作用在组件上的相应虚功求得.
组件单元惯性力所做的虚功为:
(4)
组件单元外力及重力所做的虚功为:

(5)

组件单元弹性力所做的虚功为:

(6)
其中,E为组件单元弹性模量,G为组件单元剪切模量
1.3 柔体组件的动力学描述
根据虚功原理δWi+δWf+δWt=0及Euler—Bernoulli假设,得到其运动方程

(7)
其中,M为柔体组件总质量矩阵,Q为柔体组件总广义力矩阵.
与小变形柔体组件模型相比,大变形柔体组件数学模型的表达基于非线性理论,很好地保留了纵向应变和弹性力的高阶项等,更准确地描述了大变形柔体系统的动力学特征.
2 柔体组件的陈述式模型构建
2.1 组件建模思想
组件、组件构架和连接机制是组件模型主要包含的3个概念,三者间的关系如图2所示.
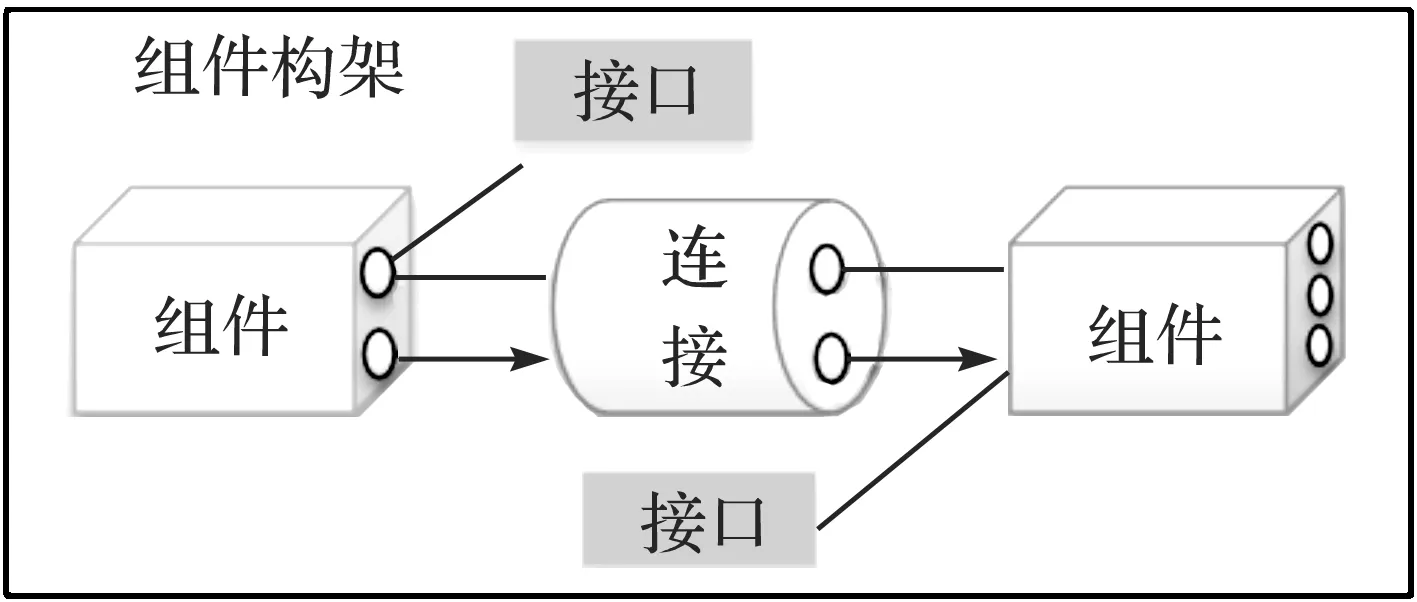
图2 Modelica模型概念关系图
由图2可知,组件构架为组件和连接机制提供稳定的工作环境,依据连接机制,组件通过接口与外界交互,因此组件模型必须要有明确属性和结构的接口,且相连接口必须是相同类型[11].
2.2 大变形柔体组件模型
本文基于组件建模思想,并结合上述组件数学模型,利用Modelica对其进行描述,包含接口定义,变量声明及模型描述这3个主要部分,具体模型定义如表1所示.
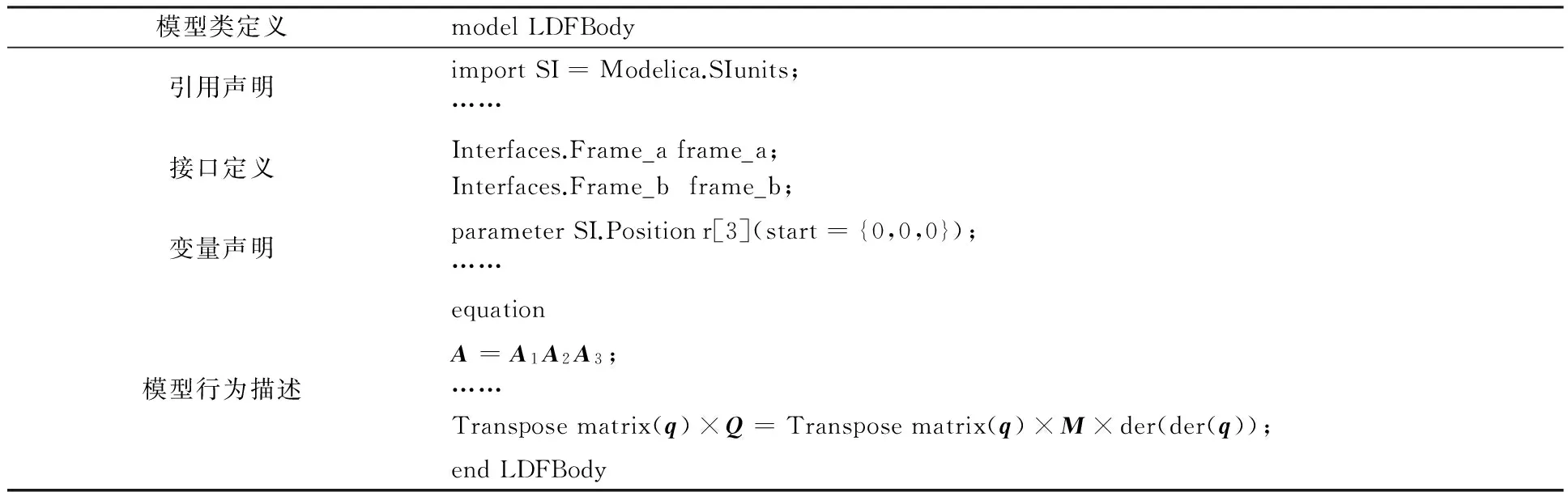
表1 大变形柔体组件模型描述
2.3 大变形组件模型的Modelica实现
根据2.2节所编写的Modelica源码,大变形柔体组件模型在Dymola平台上依次通过4大关键模块得以实现,具体如图3所示.
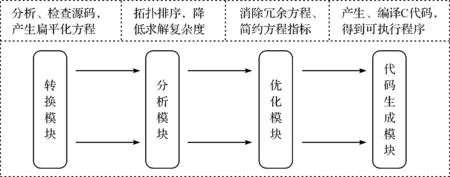
图3 Modelica模型实现过程
最后将大变形柔体组件模型进行封装并设计成可视化图形,如图4所示.Dymola平台根据参数声明自动列出大变形柔体组件模型的可更改参数表如图5所示,实现了模型的参数化.

图4 大变形柔体组件模型

图5 大变形柔体组件参数表
3 仿真算例
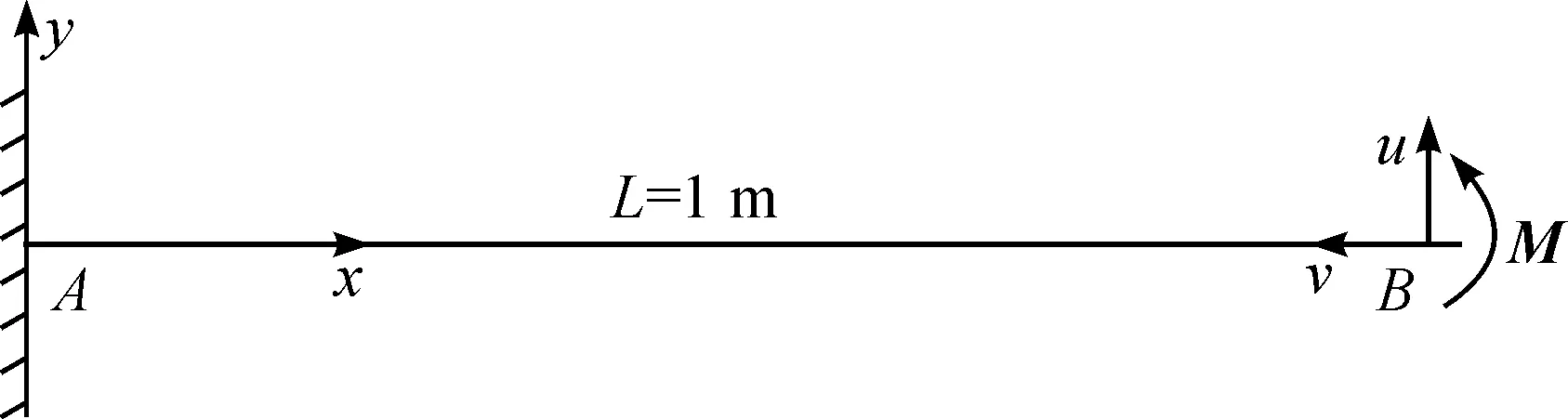
图6 大变形柔性悬臂梁
通过调用组件库中的惯性坐标系组件、大变形柔体组件、力矩组件、常量组件,构建大变形悬臂梁柔性多体系统模型,验证本文所开发的大变形柔体组件的正确性.大变形柔性悬臂梁如图6所示,柔性梁左端悬臂完全固定,右端受集中力矩M作用,在力矩M作用下柔性梁弯曲变形.本文选取与文献[12]相同的物理参数及单元划分数,并与文献[12]中的结果进行比较.柔性梁物理参数为:横截面积A=4×10-6m2,长度L=1 m,弹性模量E=70 GPa等,并将其均分成15个单元.
在Dymola平台上进行相应操作,建立大变形柔性悬臂梁模型,设定仿真参数,进行仿真求解、优化分析,得到结果如图7所示,文献[12]中仿真结果如图8所示.
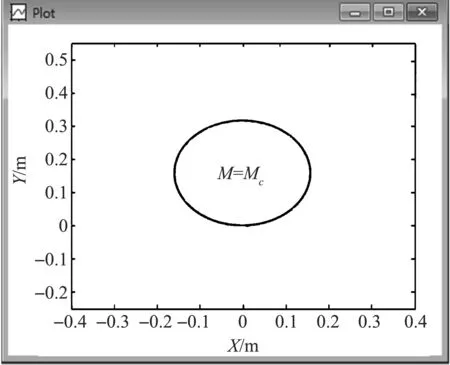
图7 力矩作用下变形曲线
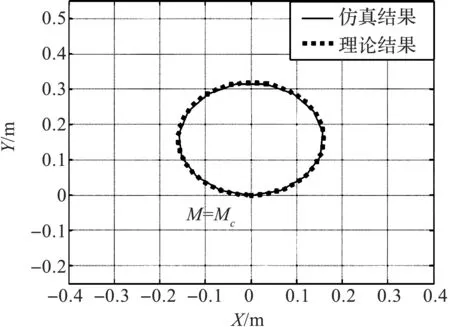
图8 力矩作用下文献[12]仿真结果
对比图7、图8可以看出,本文仿真分析结果与文献[12]中仿真分析结果高度吻合,验证了本文基于Modelica所自行开发的可重用大变形柔体组件陈述式模型的正确性.
4 结束语
本文针对大变形柔性体的仿真分析问题,选用绝对坐标法来构建大变形柔体组件数学模型,使仿真结果更为精确;通过模型降阶提高计算效率,对大变形柔性体的建模问题进行了有益探索.在理论研究基础上,基于Dymola平台成功开发了大变形柔体组件,使得Dymola初步具备了处理大变形柔性问题的能力,从而为大变形柔性多体系统模型的构建提供借鉴.但本文是针对规则形状的大变形柔体组件进行建模,对于非规则形状的大变形柔体组件还需进一步研究.
[1]赵建军,吴紫俊.基于Modelica的多领域建模与联合仿真[J].计算机辅助工程,2011,20(1):168-172.
[2]刘俊,黄运保,陈立平,等.多体动力学模型的Modelica语言建模[J].机械工程,2010,21(9):1088-1092.
[3]ELMQVISTH.ModelicaEvolution-FromMyPerspective[C]//Proceedingsofthe10thInternationalModelicaConference,Lund:LinköpingUniversityElectronicPress, 2014:17-26.
[4]陈思佳,章定国,洪嘉振.大变形旋转柔性梁的一种高次刚柔耦合动力学模型[J].力学学报,2013,45(2):251-256.
[5]BAUCHAUOA.Flexiblemultibodydynamics[M].NewYork:SpringerScience&BusinessMedia, 2010:62-87.
[6]蒋依宁.大变形柔性多体系统建模理论与实验研究[D].上海:上海交通大学,2012.
[7]张志刚,齐朝晖,吴志刚.一种基于应变差值大变形梁单元的刚柔耦合动力学分析[J].振动工程学报,2015,28(3):337-344.
[8]赵国威,吴志刚.大范围运动细长柔性空间结构动力学特性分析[J].计算力学学报,2015,32(4):512-517.
[9]丁楠.柔性多体系统动力学建模方法研究[D].吉林:吉林大学,2013.
[10]黎瑶波.基于Modelica的柔性多体系统建模与仿真[D].武汉:华中科技大学,2011.
[11]FRITZSON,P. Principles of Object Oriented Modeling and Simulation with Modelica 2.1[M]//Wiley-IEEE Computer Society Press,2003:186-194.
[12]徐圣.几何非线性空间梁动力学仿真[D].上海:上海交通大学,2012.
Development of Declarative Model for a Large Deformation Flexible Body Component
XU Kuang, SU Shaohui, HUANG Chengyi, CHEN Chang
(SchoolofMechanicalEngineering,HangzhouDianziUniversity,HangzhouZhejiang310018,China)
For the modeling of the mechanical subsystem containing large deformation flexible members, the Modelica model can only provide the rigid body components and the small flexible body components, which cannot meet the needs of the system modeling. In view of the above problem, based on the relevant dynamics theory and the absolute coordinate method, a reusable and open model of a large deformation flexible body component is developed by using declarative modeling method in Dymola software. By properly invoking and connecting the components to construct a large deformation beam system model that makes the Dymola software has the ability to deal with the problem of large deformation, and provide the foundation model for the construction of the whole model of large flexible multi-body system. Finally a typical large deformation cantilever beam system may be simulated and the results were discussed to verify the correctness and practicability of the developed large deformation flexible body component.
large deformation flexible body component; declarative modeling; absolute coordinate method; Modelica
10.13954/j.cnki.hdu.2017.01.017
2016-07-01
国家自然基金资助项目(51475129,51405117)
徐匡(1992-),男,浙江金华人,硕士研究生,多学科建模仿真优化.通信作者:苏少辉副教授,E-mail:messhhui@163.com.
TP391.9
A
1001-9146(2017)01-0076-05
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30 07:22:08
证券市场红周刊(2022年37期)2022-09-26 00:15:41
体育科技文献通报(2022年3期)2022-05-23 13:46:54
新高考·高二数学(2022年3期)2022-04-29 05:08:09
石油沥青(2021年5期)2021-12-02 03:21:18
文化创新比较研究(2020年7期)2021-01-13 09:10:48
心声歌刊(2018年4期)2018-09-26 06:54:14
中华诗词(2017年9期)2017-04-18 14:04:38
中学数学杂志(初中版)(2016年5期)2016-11-01 11:22:43
河南科技(2014年5期)2014-02-27 14:08:47