
一种基于DRNN神经网络的自适应控制算法
2017-03-02 08:20:21李静
计算机与数字工程 2017年2期
李 静
(山东商务职业学院 烟台 264000)
一种基于DRNN神经网络的自适应控制算法
李 静
(山东商务职业学院 烟台 264000)
现在很多实际系统很难用线性方程来描述,DRNN神经网络在处理非线性问题上具有很大的优势,具有较强的信息处理能力。论文提出了一种基于DRNN神经网络的自适应PID控制算法,仿真结果显示出:该控制算法在较短的时间内可以使系统获得较好的动态性能,过渡过程的时间较短,具有较强的鲁棒性。
神经网络; 自适应; 系统辨识; 控制算法; 非线性; 辨识
Class Number TM256
1 引言
在现实世界中,存在着许多非线性系统。这些系统很难用线性模型来描述,只有用非线性模型才能准确地描述。现在,很多实际系统都比较复杂,对控制精度要求都很高。只凭普通的控制算法很难对实际系统进行建模[1~2]。为了获得更加准确的控制算法,通常将智能控制算法与自适应控制算法结合在一起,以便更加精确地建立实际系统的非线性数学模型。基于DRNN神经网络是一种自适应的非线性智能控制算法,它在处理非线性问题上具有很大的优势,具有较强的信息处理能力。由于DRNN神经网络具有超强的学习能力和非线性特性,是对非线性系统进行辨识的非常有效的方法[3~5]。
2 基于DRNN神经网络的系统辨识
DRNN神经网络是一种回归神经网络,网络结构共有三层。DRNN神经网络的结构图如图1所示。
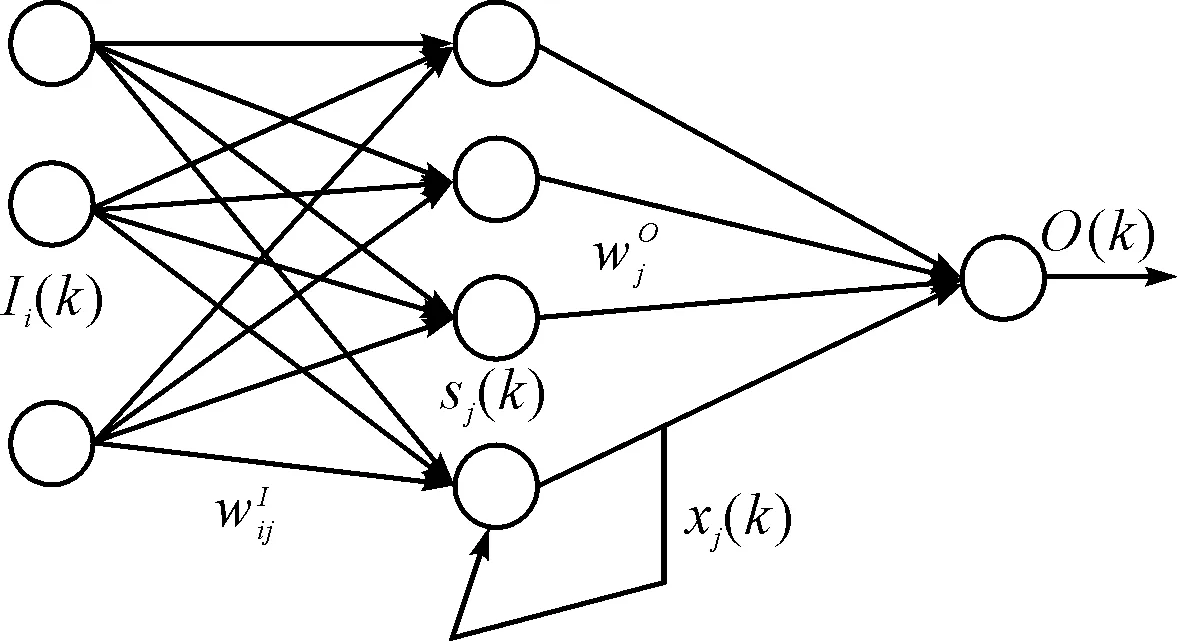
图1 DRNN神经网络的结构图
在DRNN神经网络中,设I=[I1,I2,…,In]为网络输入向量,Ii(k)为输入层第i个神经元的输入,隐含层第j个神经元的输出为Xj(k),Sj(k)为第j个回归神经元输入总和,f(·)为S函数,O(k)为DRNN网络的输出[6~8]。
DRNN神经网络的算法为

式中,WD和WO为网络回归层和输出层的权值向量,WI为网络输入层的权值向量。
u(k)和y(k)为辨识器的输入。DRNN为网络辨识器。y(k)为被控对象实际输出,ym(k)为DRNN的输出。将系统输出y(k)及输入u(k)的值作为辨识器的输入,将系统输出与网络输出的误差作为辨识器的调整信号[9~10]。DRNN神经网络辨识图如图2所示。
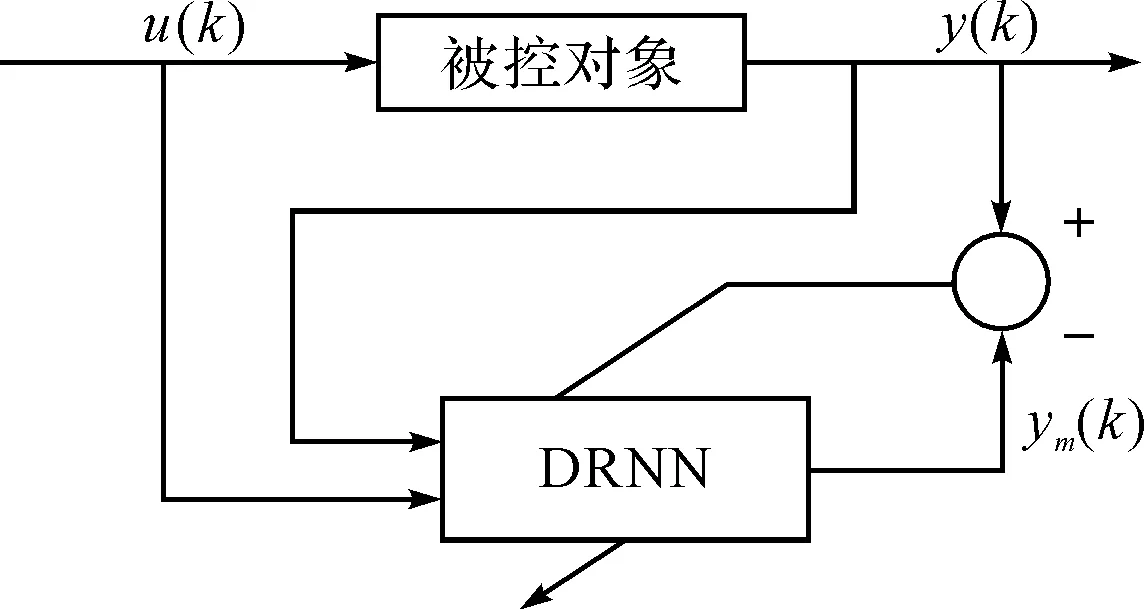
图2 DRNN神经网络辨识图
网络输出层的输出为
(1)
隐含层的输出为
Xj(k)=f(Sj(k))
(2)
隐含层的输入为
(3)
辨识误差为
em(k)=y(k)-ym(k)
(4)
辨识指标取:
(5)
3 基于DRNN神经网络的自适应控制算法

图3 基于DRNN神经网络自适应控制算法
基于DRNN神经网络自适应控制算法如图3所示,其中NN1和NN2为神经网络,用于控制器u1和u2的PID参数为kp、ki、kd。r1和r2为系统输入指令,y1和y2为系统输出值。
以控制器u1为例,控制算法如下:
u1(k)=kp1(k)x1(k)+ki1(k)x2(k)+kd1(k)x3(k)
(6)
e1(k)=r1(k)-y1(k)
(7)
x1(k)=e1(k)
(8)
(9)
(10)
式中,T为采样时间。采用DRNN神经网络进行整定[11~12]。
(11)
(12)
(13)
(14)
4 基于DRNN神经网络的自适应控制算法
假设被控系统模型如下所示:
(15)
(16)
其中未知参数a11=0.3,a12=0.7,a21=5.3,a22=15.2,按照上述设计控制律如下:
(17)
其中
(18)
(19)
(20)
仿真曲线如图4~图9。
通过仿真图可以看出,状态变量在整个过程中趋于稳定。误差e1和e2经过短暂的过渡过程趋于稳定,误差波形的震荡幅度比较小,收敛得比较快。三个控制参数kp、ki、kd的收敛效果比较好,经过短暂的波动趋于稳定。可以看出,该控制算法具有超调量小,精度高,较快的响应速度,减少了系统的调节时间。
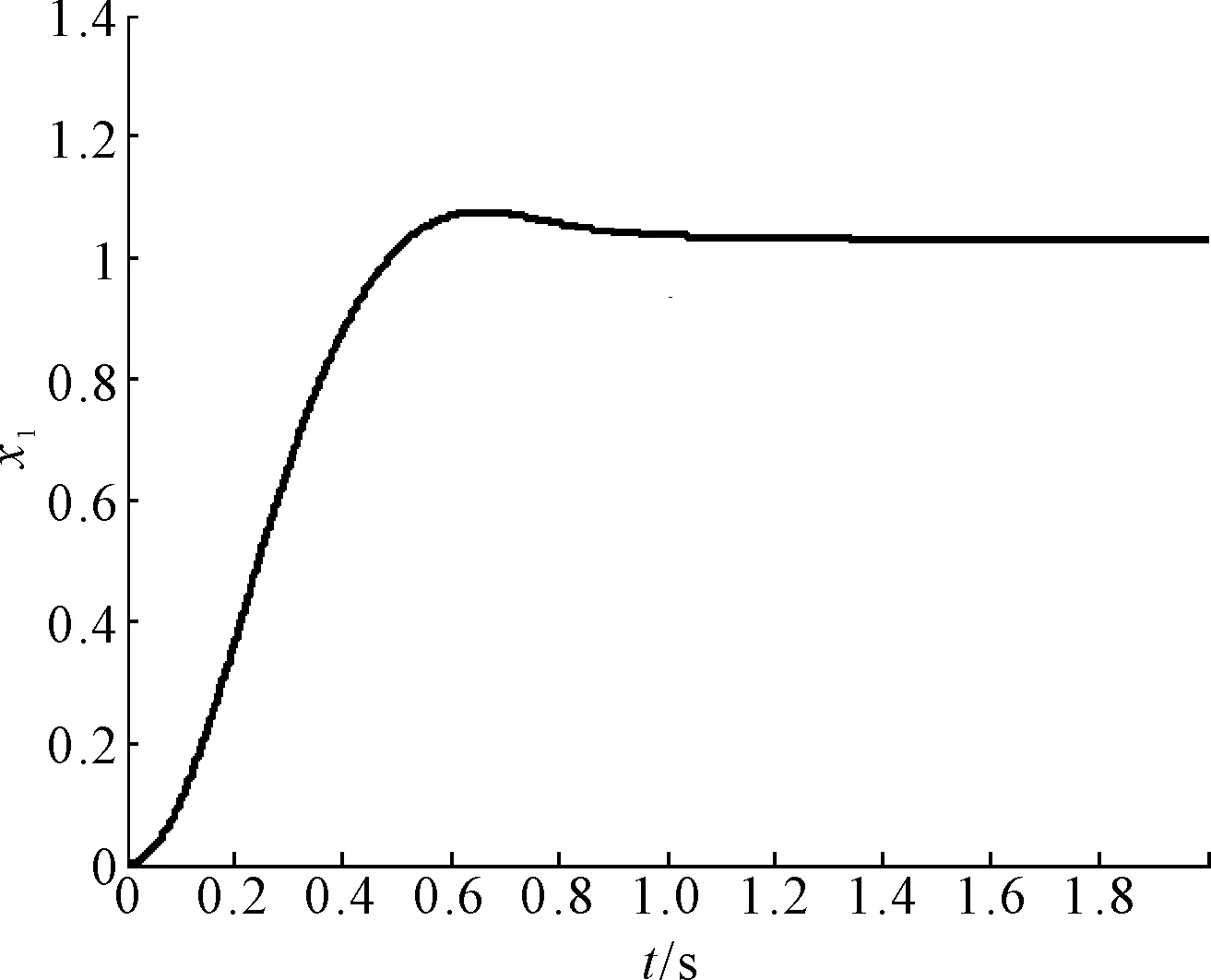
图4 状态x1曲线
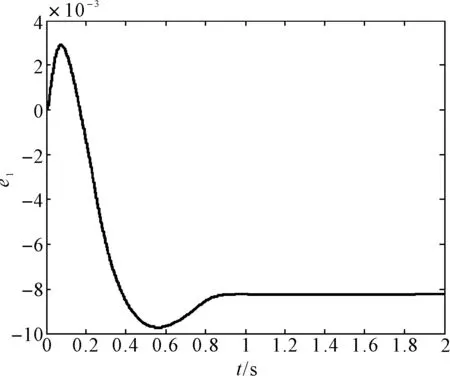
图5 误差e1曲线
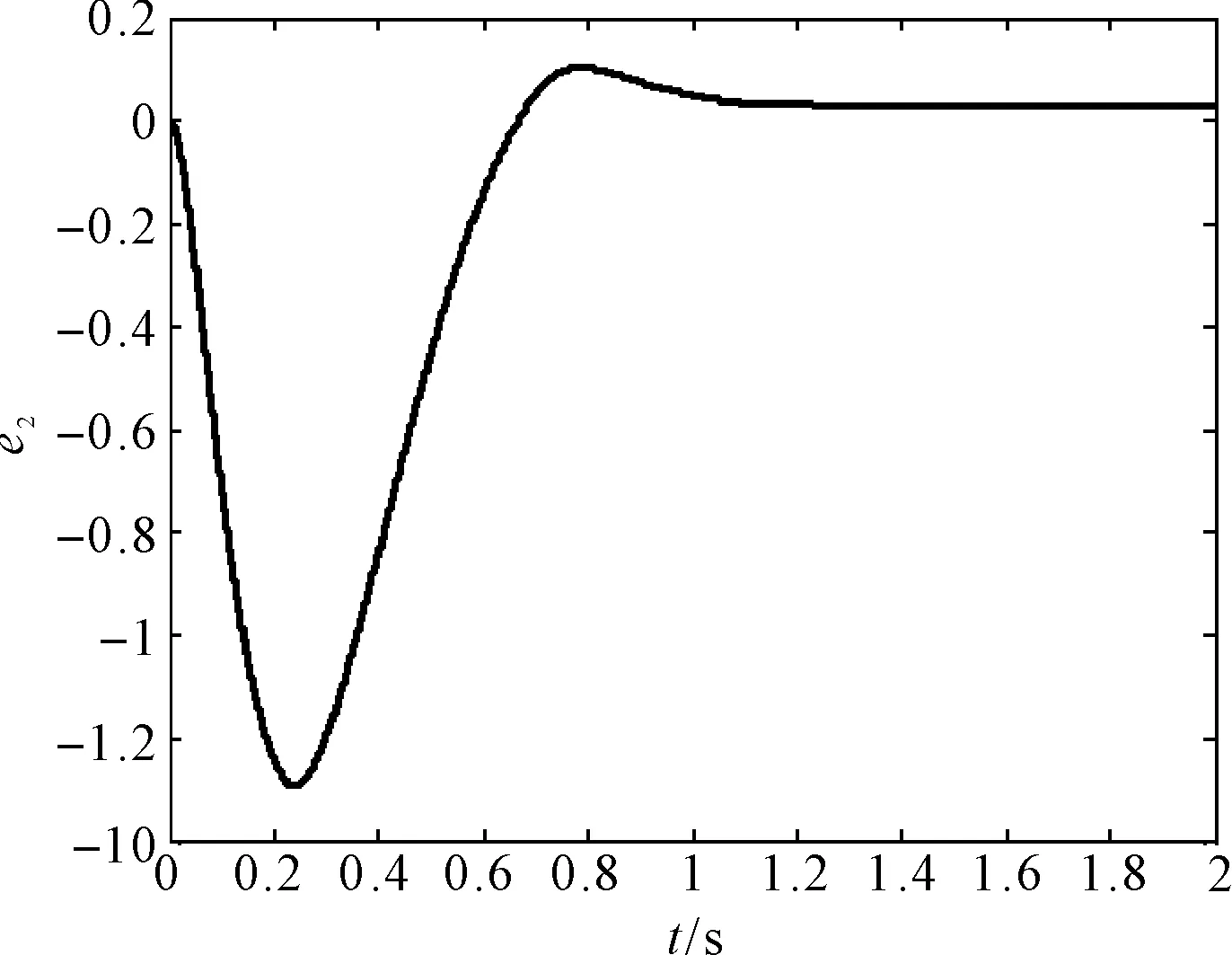
图6 误差e2曲线
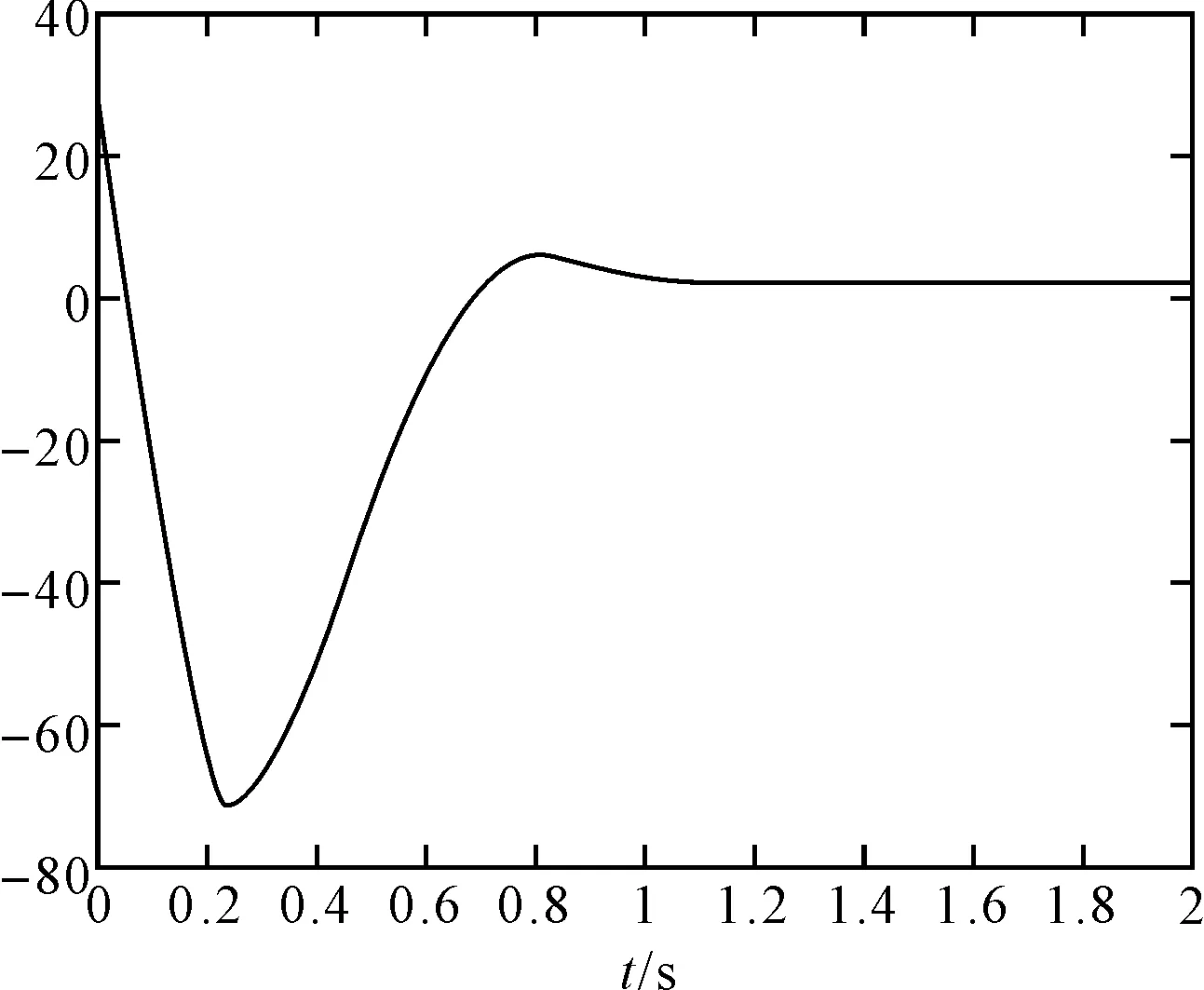
图7 参数kp曲线
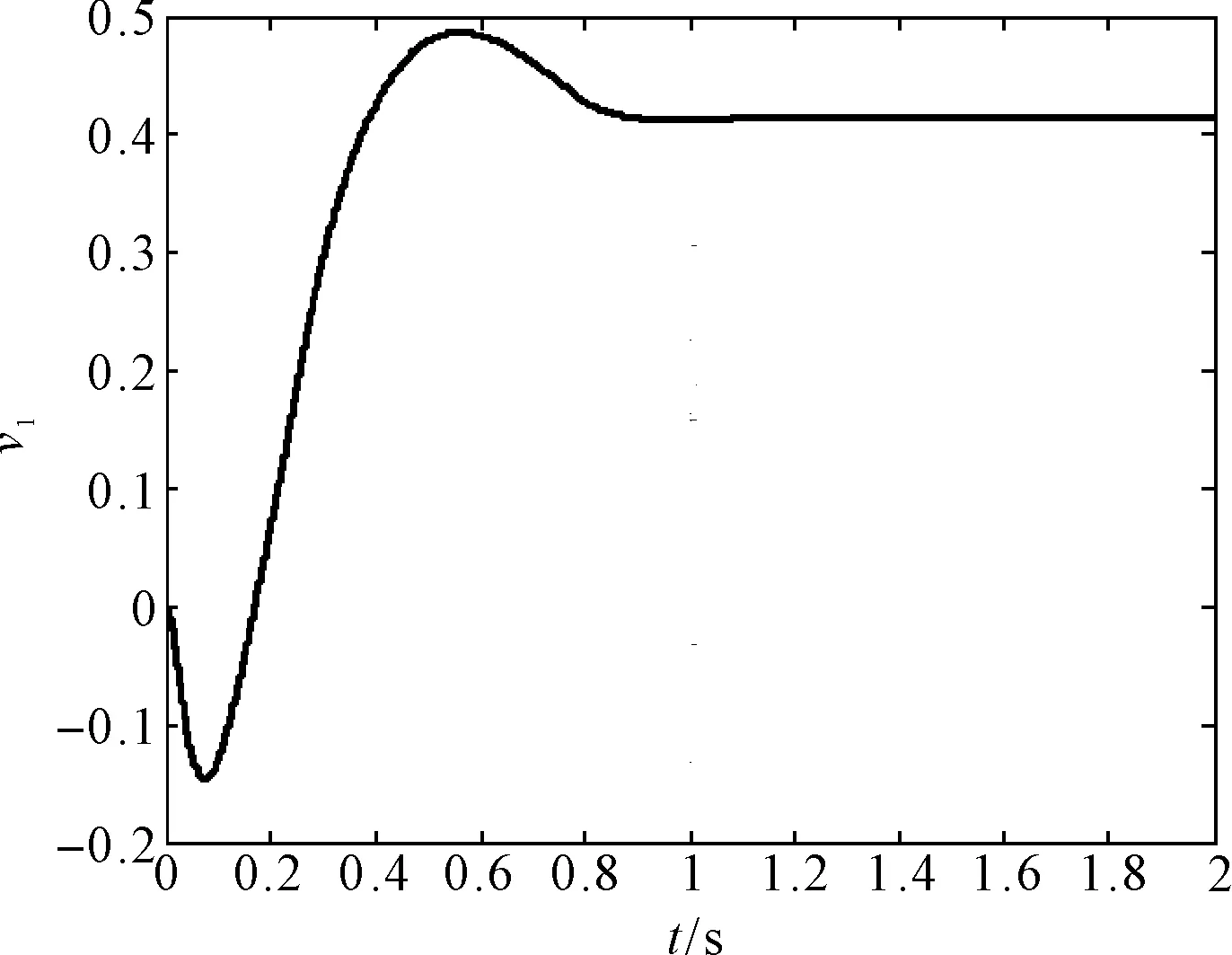
图8 参数ki曲线
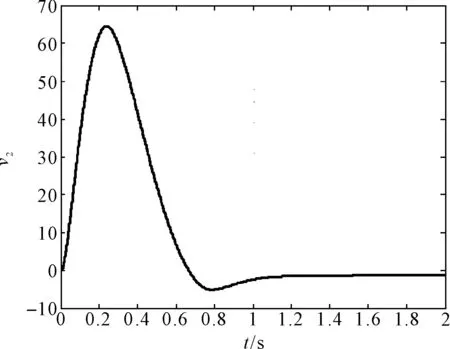
图9 参数kd曲线
5 结语
通过对基于DRNN神经网络的自适应PID控制算法的仿真分析,和传统PID控制算法相比,DRNN神经网络具有自适应、自调整、自学习的功能,算法的抗干扰性比较强,减少了系统参数变化和外界干扰所引起的误差。仿真结果显示出:该控制算法在较短的时间内,可以使系统获得较好的动态性能,过渡过程的时间较短,参数的收敛速度比较快,超调量较小,具有较强的鲁棒性,该控制算法具有优良的控制效果。
[1] 孙亚飞,王旭.基于人工神经网络的感应电机系统辨识[J].控制工程,2002(7):71-73. SUN Yafei, WANG Xu. Identification of induction motor using ANN[J]. Control Engineering of China,2002(7):71-73.
[2] 谭永红.基于BP神经网络的自适应控制[J].控制理论与应用,1994(2):81-87. TAN Yonghong. Adaptive control based on bp neural network[J]. Control Theory and Applicationes,1994(2):81-87.
[3] 苏义鑫,杨熔.神经网络在自动控制中的应用[J].武汉汽车工业大学学报,1996,18(2):25-28. SU Yixin, YANG Rong. Application of Neural Network to Automatic Control Problem[J]. Wuhan Automotive Polytechnic University,1996:18(2):25-28.
[4] 毕娟,沈凤龙.基于神经网络的交流电机PID控制系统[J].仪表技术与传感器,2010(2):98-99. BI Juan, SHEN Fenglong. AC Motor PID Control System Based on Neural Network[J]. Instrument Technique and Sensor,2010(2):98-99.
[5] 刘华,黄田.基于神经网络的一类非线性系统参数估计[J].天津大学学报,2012,27(5):563-566. LIU Hua, HUANG Tian. Parameter estimation method for a class of nonlinear systems using neural networks[J]. Journal of Tianjin University,2012,27(5):563-566.
[6] 马金山,高珍.灰色PID控制算法及仿真研究[J].机械管理开发,2014(10):17-19. MA Jinshan, GAO Zhen. Grey PID control algorithm and simulation[J]. Mechanical Management and Development,2014(10):17-19.
[7] 李华,张健.神经网络在直流无刷电机控制系统中的应用[J].太原理工大学学报,2012(5):475-478. LI Hua, ZHANG Jian. Application of Neural network in the Control System of DC Motor[J]. Journal of Taiyuan University of Technology,2012(5):475-478.
A Kind of Adaptive Control Algorithm Based on DRNN Neural Network
LI Jing
(Shandong Business Institute, Yantai 264000)
At present, it is difficult to use linear equation to describe many practical systems. DRNN neural network has great advantages in dealing with nonlinear problem, it has the strong ability of information processing. A kind of adaptive PID control algorithm based on DRNN neural network is proposed in this paper. The simulation results show that the control algorithm can make the system achieve better dynamic performance in a relatively short period of time, and have short transition time and strong robustness.
neural network, adaptive, system identification, control algorithm, nonlinear, identification
2016年8月7日,
2016年9月19日
李静,女,讲师,研究方向:计算机。
TM256
10.3969/j.issn.1672-9722.2017.02.025
猜你喜欢
自然杂志(2021年6期)2021-12-23 08:24:46
泰山学院学报(2019年6期)2020-01-14 02:34:34
现代装饰(2018年5期)2018-05-26 09:09:01
制造技术与机床(2017年6期)2018-01-19 02:41:07
电源技术(2015年5期)2015-08-22 11:18:38
电源技术(2015年9期)2015-06-05 09:36:06
弹箭与制导学报(2015年1期)2015-03-11 15:32:06
天津商务职业学院学报(2015年2期)2015-02-28 16:47:22
天津商务职业学院学报(2015年1期)2015-02-28 16:47:12
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
