
基于光电稳台的扰动分析
2017-03-01 10:56刘维亭
电子设计工程 2017年2期
高 翔,刘维亭
(江苏科技大学 电子信息学院,江苏 镇江212003)
基于光电稳台的扰动分析
高 翔,刘维亭
(江苏科技大学 电子信息学院,江苏 镇江212003)
光电稳定平台广泛应用在车载、武装设备系统中,稳定平台台体的干扰力矩的作用影响其伺服系统控制精度,基于更好地掌握光电稳定平台伺服系统的动力学特性,采用自适应控制算法,并通过误差模型的仿真研究,对斜坡和低频干扰力矩抑制、摩擦随机干扰力矩抑制、阶跃和高频干扰力矩抑制几种干扰力矩进行分析,分析误差影响度。最后分析比较在不同路况下抑制阶跃和高频干扰力矩后对伺服系统的影响结果。得出在中等越野路面(兼容减振器)下,满足指标100×100的要求。
光电稳定平台;干扰力矩;伺服控制;误差建模
随着科学技术的快速发展,光电稳定平台在车载、机载和舰载武装系统中应用越来越广泛。应用广泛的车载稳定平台主要作用是隔离载体对光电探测器视轴的扰动,光电稳定平台伺服控制系统的控制精度的准确性决定了其隔离扰动的能力。为了更好地掌握光电稳定平台伺服系统的动力学特性[1],从而提高其伺服系统控制精度,需要对影响光电稳定平台的扰动进行分析。更好地配备于车载,适应全天时、全天候以及复杂地形条件的工作。
文中对几种光电稳定平台扰动分析,阐述了光电稳定平台的结构组成,对斜坡和低频干扰力矩抑制、摩擦随机干扰力矩抑制、阶跃和高频干扰力矩抑制几种干扰力矩进行分析,并通过误差模型的仿真研究,分析误差影响度,并通过实验结果体现扰动结果。
1 系统结构
光电稳定平台由光载电荷,主控板,视频预处理板,跟踪板,伺服控制板,光纤转换板,俯仰电机,限位器,俯仰编码器,方位编码器,方位电机,导电滑环等组成。
系统工作时,操控机通过CAN总线向光电系统发送工作指令[2],将光电载荷的视轴引向观察区域,该区域的地面景物通过光电载荷的光学系统成像在白光、红外热像仪上,生成Cameralink数字视频信号,该信号送给图像跟踪器进行处理,将感兴趣的目标从背景中分割出来,并计算出目标与光轴之间的偏移量送给伺服控制系统。伺服控制系统根据偏移量数据,经伺服控制解算后驱动稳定平台,带动光电载荷向减小偏移量的方向运动。使光电分系统视轴锁定并跟踪住目标,同时实时采集稳定平台角度信息、焦距信息及激光测距信息。为用户对目标进行跟踪监测及特征评价提供测量参数。
2 控制方案
本项目的伺服控制系统由方位、俯仰稳定跟踪控制系统组成。俯仰框架装载白光摄像机、红外热像仪、激光测距系统[3],两个框架轴系都安装敏感轴系角位置、惯性角速度的传感器以实现光电成像传感器相对于惯性空间的稳定。
影响平台稳定的干扰力矩可以分为很多种类型:常值干扰力矩、低频干扰力矩、高频干扰力矩、阶跃干扰力矩、斜坡干扰力矩、抛物波干扰力矩以及随机干扰力矩[4],其中,6级风属于斜坡干扰力矩、车上人员的走动属于低频干扰力矩、开关车门属于阶跃干扰力矩、发动机工作属于高频干扰力矩(20 Hz)而光电稳台自身轴系的摩擦属于随机干扰力矩。
2.1 斜坡和低频干扰力矩抑制
对于斜坡干扰力矩以及低频干扰力矩的消除,通常采用的是将伺服系统的速度回路设计成如图1所示,这样系统的Kp→∞,Kv→∞那么此时伺服系统对于斜坡输入干扰力矩的响应稳态值为0,对于低频干扰力矩的消除则只需设计速度环的带宽大于25 Hz即可。
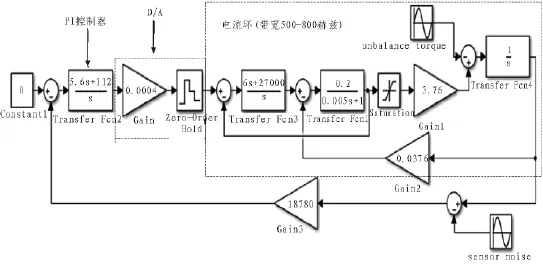
图1 伺服系统仿真框图
2.2 摩擦随机干扰力矩抑制
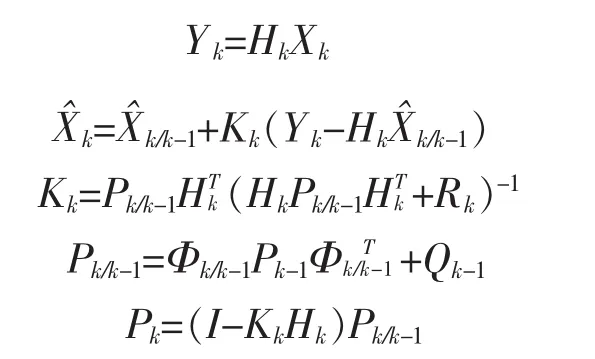
对于摩擦随机干扰力矩,采用的是基于lurge模型的数学建模方法对非线性摩擦力矩进行识别[5],然后采用前馈控制器对其进行抑制如图2所示,图3为实测的摩擦干扰力矩所引起的光电稳台低速爬行曲线和采用lurge模型仿真得到的光电稳台低速爬行曲线对比图,可以看出在对非线性摩擦建模的过程中采用lurge模型计算得到的结果是非常精确的。
2.3 阶跃和高频干扰力矩抑制
对于阶跃干扰力矩和发动机高频干扰力矩(20 Hz)采用的是基于线性加速度计的自适应扰动抑制技术。
首先采用线性加计对陀螺的噪声进行抑制
根据卡尔曼滤波[6]方程:
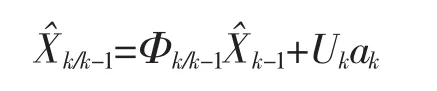
利用已测的俯仰和方位角加速度[7]对陀螺进行卡尔曼滤波。
3 实验及结果分析
3.1 斜坡干扰力矩抑制实验结果
斜坡干扰力矩的仿真是给定伺服系统1 000个码(每个码对应0.003 05°/s)的速度,看系统的反馈速度和给定速度之间由于风扰所产生的残差[8],伺服系统速度回路所引入的残差(>200),速度回路的速度跟随效果(残差→0)。
图2 基于Lurge模型的前馈控制仿真框图
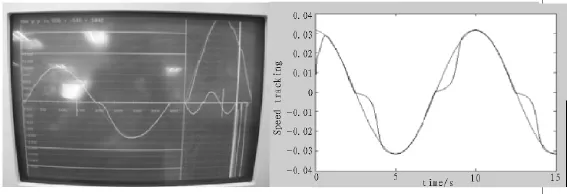
图3 仿真与实测曲线对比
3.2 摩擦干扰力矩抑制实验结果
给定低速输入1.5°/s sin(2πt),通过比较不使用和使用前馈控制器来分析反馈速度在低速段的畸变,从而看出采用前馈控制器对摩擦干扰力矩的抑制效果[9],采用前馈控制器的速度反馈在低速段的畸变明显小于未采用前馈控制器的速度反馈。
3.3 不考虑高频和阶跃干扰力矩的仿真结果
其仿真框图及结果曲线分别如图4所示,曲线中一个码对应0.00305度,则当桅杆升起时不考虑高频扰动[10],视轴的晃动量最大值为0.17×0.003 05= 9.3 urad<一个像素。
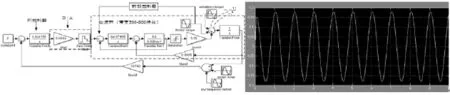
图4 不考虑高频和阶跃干扰力矩的仿真原理图及仿真曲线
4 技术特点
4.1 基于参考模型的自适应控制算法
无论是驻车模式下,还是桅杆处于最低位置由于发动机引入的高频还是行车过程中由于路面颠簸所引入的高频,对于控制算法的设计并没有区别,唯一不同的地方在于桅杆处于最低位置的高频频率为20 Hz、幅值为1°/s,行车过程中(兼容减震器)的高频频率为15 Hz,幅值根据路面情况的不同而不同:普通越野路面10°/s、中等越野路面20°/s、极限越野路面30°/s—40°/s。
基于参考模型的自适应控制[11]算法原理图如图5所示,通过比较参考模型的理想角加速度和实际模型实测的角加速度便可利用电流环对高频扰动进行抑制。
4.2 自适应控制仿真结果
4.2.1 桅杆处于最低处仿真结果
把仿真原理图5中的base motion改成1°/ssin(2*pi*20*t)进行仿真,仿真曲线如图6所示,图中一个码对应0.00305°,从而视轴的晃动量为 0.15× 0.003 05=8.2 urad<一个像素,若考虑到第2节中低频扰动、摩擦力扰动和斜坡扰动[12]所引入的9.3urad视轴晃动量,则桅杆处于最低处视轴总的晃动量为17.5 urad<2个像素。
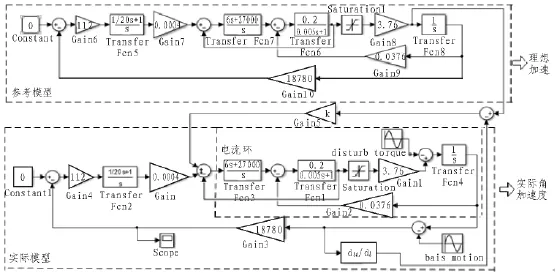
图5 基于参考模型的自适应控制原理图
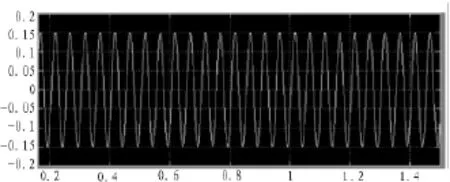
图6 桅杆处于最低位置时的高频抑制曲线
4.2.2 普通越野路面(兼容减振器)仿真结果
由于普通路面采用减振器其发动机高频区域的振动被消除,但是由于减振器[13]本身存在谐振点(15Hz),从而此区域的振动会被放大,根据实验数据将仿真原理图5中的base motio改成10°/ssin(2*pi*15*t)进行仿真,仿真曲线如图7所示,图中一个码对应0.00305°,从而视轴的晃动量为1.2×0.003 05=61 urad<90 urad,满足图像稳定小于3个像素的要求(单个像素为30 urad)。
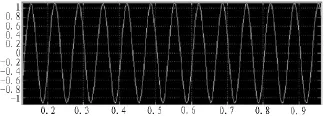
图7 普通越野路面的高频抑制曲线
4.2.3 中等越野路面(兼容减振器)仿真结果
根据实验数据将仿真原理图5中的base motion改成20°/ssin(2*pi*15*t)进行仿真,仿真曲线如图8所示,图中一个码对应0.003 05°,从而视轴的晃动量为22×0.003 05=0.0671°,并非是4.2.2的两倍关系,原因在于中等越野路面加速度过大已超过电机1000°/s2能力控制范围。
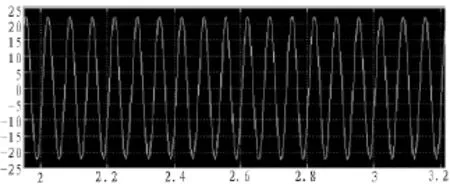
图8 中等越野路面的高频抑制曲线
可见光摄像机处于最长焦距[14]时,视场角为(0.87°,0.65°),则0.0671°对应于 (7.7%水平视场,10.3%俯仰视场),所占像素为78×78,满足指标100× 100的要求。
5 结束语
文中分析了几种影响光电稳定的扰动因素,这里不考虑其他影响力微弱的扰动因素。通过比较不同路面情况的模型并利用电流环对高频扰动进行抑制,提高伺服系统的带宽。
[1]李嘉全,丁策,孔德杰,等.基于速度信号的扰动观测器及在光电稳定平台的应用[J].光学精密工程,2011(5):998-1004.
[2]刘长顺,王兵,陈兆兵.车载光电稳定平台外框架优化设计[J].中国光学,2011(6):606-610.
[3]张新勇,王合龙,刘昇.机载光电稳定平台的模型辨识研究[J].电光与控制,2014(3):62-65,71.
[4]李贤涛,张葆,孙敬辉,等.航空光电稳定平台扰动频率自适应的自抗扰控制 [J].红外与激光工程,2014(5):1574-1581.
[5]李贤涛,张葆,沈宏海.基于自抗扰控制技术提高航空光电稳定平台的扰动隔离度[J].光学精密工程,2014(8):2223-2231.
[6]廖洪波,范世珣,黑墨,等.光电稳定平台伺服系统动力学建模与参数辨识 [J].光学精密工程,2015(2):477-484.
[7]汪永阳,戴明,丁策,等.光电稳定平台中高阶扰动观测器的应用[J].光学精密工程,2015(2):459-466.
[8]魏伟,戴明,李嘉全,等.航空光电稳定平台的自抗扰控制系统[J].光学精密工程,2015(8):2296-2305.
[9]张宇鹏.光电稳定平台角位移高精度测量方法研究[J].国外电子测量技术,2015(10):54-57.
[10]孔德杰,戴明,程志峰,等.动基座光电稳定平台伺服系统中加速度反馈的实现 [J].光学精密工程,2012(8):1782-1788.
[11]李贤涛,张葆,毛大鹏,等.航空光电稳定平台的二级自抗扰控制器[J].光电子.激光,2013(12): 2270-2277.
[12]李岷,马军,周兴义.机载光电稳定平台检测技术的研究[J].光学精密工程,2006(5):847-852.
[13]李英,王绍彬,葛文奇.影响光电平台稳定精度的因素分析 [J].长春理工大学学报:自然科学版,2009(1):4-7.
[14]朱华征,周晓尧,张文博,等.光电稳定平台中陀螺随机漂移的处理方法 [J].中国惯性技术学报,2009(2):225-230.
Disturbance analysis based on photoelectric stabilized platform
GAO Xiang,LIU Wei-ting
(School of Electrical and Information,Jiangsu University of Science and Technology,Zhenjiang 212003,China)
Opto-Electronic stabilized platform is widely used in vehicle weapons and equipment system,the role of the stabilized platform disturbance torque affect the control accuracy of servo systems,in order to better master the dynamic characteristic of opto-Electronic stabilized platform servo system,using adaptive control algorithm and through the simulation research of error model,slope and low frequency disturbance torque, friction of random disturbance torque, step and high frequency disturbance torque is analyzed,and analyze error effect.Analysis and comparison the effect and outcome of the servo system under different road conditions inhibit step and after high frequency disturbance torque.Results display that it meets the requirements of the indicators 100×100 under the medium cross-country road(compatible with shock absorber).
opto-electronic stabilized platform;disturbance torque;servo control;errors model
TN2
:A
:1674-6236(2017)02-0076-04
2016-04-21稿件编号:201604212
国家自然科学基金(61503161);船舶预研支撑技术基金项目(13J2.5.2)
高 翔(1989—),女,江苏泗洪人,硕士研究生。研究方向:电气自动化。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
航空兵器(2020年5期)2020-12-03
科学咨询(2020年53期)2020-03-19
商品与质量(2019年22期)2019-11-29
科学导报·学术(2019年44期)2019-09-10
测控技术(2018年12期)2018-11-25
重庆邮电大学学报(自然科学版)(2016年3期)2016-07-04
北京航空航天大学学报(2016年4期)2016-02-27
应用光学(2015年1期)2015-06-01
弹箭与制导学报(2015年1期)2015-03-11
