
基于可变导向车道的应急车辆通行策略研究*
2017-02-27 11:37陈珊珊
武汉理工大学学报(交通科学与工程版) 2017年1期
赵 欣 李 灿 陈珊珊
(武汉理工大学交通学院 武汉 430063)
基于可变导向车道的应急车辆通行策略研究*
赵 欣 李 灿 陈珊珊
(武汉理工大学交通学院 武汉 430063)
提出应急车辆在交叉口的可变导向车道优先控制概念,并建立交叉口车辆实时延误模型,制定对应的信号优先控制及时空组合优先控制策略,在实现应急车辆无延误的前提下,以交叉口车辆总延误最小为目标,建立多相位信号优化配时模型,并选用Lingo软件对该非线性约束优化问题进行求解.仿真结果表明,可变导向车道优先控制策略能够显著减小应急车辆在交叉口的延误,相较于传统的信号优先控制也能够减小对社会车辆延误的影响,具有更好的适用性.
应急车辆;可变导向车道;时空组合优先;控制策略
0 引 言
应急车辆在交叉口处的通行问题一直是国内外学者研究的热点.Obenberger[1]对应急车辆的信号优先控制系统进行了研究,该系统对信号交叉口实行单点控制,并采用车载GPS单元发射控制信号的方式,保证应急车辆的绿色通行;Bachelder等[2]提出一种基于感应线圈的应急车辆信号优先控制系统;田芳等[3]以特种车辆为研究对象,构建了其在交叉口的绿灯畅行系统,并给出了一种信号控制逻辑;谢秉磊等[4]通过对应急车辆交叉口信号系统的控制,降低应急车辆通过交叉口的延误,通过分析应急车辆具体的运行方式、运行特性及运行过程,得到适合不同交叉口的应急车辆的检测方式和应急车辆检测器设置的具体位置.综上,国内外专家学者从“硬措施”的角度对应急车辆在交叉口处的通行策略进行了大量研究,传统的方法是在路段或交叉口设置应急车辆检测器,当检测到应急车辆到达时实施该路段下游交叉口的信号优先控制[5-7].然而由于城市道路拥堵情况日益严重、社会车辆驾驶员避让意识薄弱等因素的影响,应急车辆被赋予的优先权屡屡深陷困境;且早晚高峰时段,车辆排队长度溢出交叉口的现象频现,而城市相邻交叉口间的距离较短,排队车辆很难在短时间内消散完,因此采用传统的交叉口信号控制策略会使应急车辆通行效率大打折扣.
为了顺应道路发展,并更大程度地减少应急车辆的通行时间,及时挽救更多的生命或财产,将目前道路上正逐步兴起的可变导向车道技术引入到应急车辆通行策略中,实现“可变导向车道优先控制”,并制定完善的应急车辆优先通行方案,以期达到应急车辆尽可能安全快速到达急救现场的目的.
1 应急车辆优先通行问题分析
1.1 应急车辆通行特点
通过调查了解到,我国应急车辆被法规赋予的优先通行权难以保障,主要原因包括为:①不少社会车辆驾驶员缺乏避让应急车辆的意识;②由于交通安全管理不畅导致“守法困境”,社会车辆因避让应急车辆产生的违法行为可以免于处罚,但申请撤销违法记录的取证程序繁琐;③对于不避让行为的查处执法难;④“车多路少”的矛盾加剧了交通拥堵.
应急车辆不受信号控制,利用逆行或换道优先通行,这种方式会导致应急车辆与社会车辆的摩擦或碰撞概率增大,不仅可能增加延误时间,还对应急车辆的行驶安全产生威胁.据调查,美国7年中应急车辆的碰撞事件发生多达600多件[8],而弗吉利亚地区的关于应急车辆事故调查的报告中显示有约31%的事故发生在交叉口区域[9].故为提高应急车辆在交叉口的通行安全,文中的研究中将应急车辆纳入交叉口信号管理,即应急车辆严格按照信号指示行驶,此时会产生红灯延误.
1.2 可变导向车道优先控制概述
典型的设有可变导向车道的信号交叉口结构见图1.该交叉口东进口道内侧第二条车道即为可变导向车道,车道上方标志牌对应的箭头为可变导向箭头,在值班交警或控制中心的调控下可灵活更改指示方向.

图1 设置可变导向车道的交叉口
可变导向车道优先控制是指将可变导向车道应用到应急车辆通行中,当交叉口控制中心接收到应急指令时,优先考虑可变导向车道为应急车辆行驶方向上的所有车辆提供通行,提高该方向上排队车辆的消散能力,减小应急车辆的排队延误,见图2.
可变导向车道优先控制的目的是通过与交叉口信号优先控制的配合,尽可能地减小应急车辆交叉口延误与交叉口整体延误.其控制原则主要包含:①应急车辆优先原则.可变导向车道属性的变化是以应急车辆优先通行目的为主,交叉口整体延误最小为辅进行控制的.②路权明确原则.标志牌上游行驶车辆及在可变导向车道等待的车辆均明确车道导向信息,按道行驶.③合理分配原则.在考虑可变导向车道的信号配时优化模型中,需以保证行人及驾驶员行驶安全为前提,合理分配各相位绿灯时间.

图2 可变导向车道优先控制(以应急车辆需左转为例)
2 应急车辆交叉口时空组合优先控制策略
2.1 通行方案
传统的应急车辆优先通行方法是当应急车辆到达相应路段时,由路段处的检测器检测到应急车辆到达之后,再进行实施相应的优先通行措施.具体示意图见图3,当检测器检测到应急车辆即将通过交叉口直行或者左转,但此时直行、左转相位处于红灯状态,信号灯控制系统接收到反馈信息并进行紧急处理,采用应急车辆强制优先模式(一般采取延长绿灯时间或缩短红灯时间),提供给应急车辆交叉口优先通行权利.

图3 传统应急车辆交叉口信号优先控制
该方法适用于没有路段排队车辆或车流量较小的情况,通过对交叉口的信号灯时间显示的控制,为应急车辆提供优先的绿灯信号,从而保证其优先通行.
而应急车辆交叉口时空组合优先控制方案旨在减少与应急车辆同方向行驶的排队车辆数,降低应急车辆在交叉口的等待时间和行车延误.具体示意图见图4,当检测器检测到应急车辆即将通过交叉口左转,前方有大量排队车辆,而直行车道排队车辆较少,触发可变导向车道功能,将1条直行车道转变为左转车道,即进口道由原来的1条左转车道变为2条,左转方向排队车辆显著减少,应急车辆到达交叉口时延误显著降低.
该方法适用于进口道满足设置可变导向车道条件的交叉口,并需要信号控制进行条件辅助,需配有可变导向车道标志及标线,且可视性和实用性要求较高.

图4 应急车辆交叉口时空优先控制
2.2 时空优先控制策略
随着交通拥堵问题成为我国大中型城市普遍存在的“城市病”,仅采取传统的信号优先控制手段无法有效减小应急车辆在交叉口的排队延误,且长时间对应急车辆请求方向上开放绿灯会严重影响其他相位社会车辆的通行,从而加剧整个交叉口的总延误,故从交叉口信号配时与车道两方面综合考虑,制定时空组合优先控制策略.
2.2.1 延误模型建立

图5 交叉口相位相序
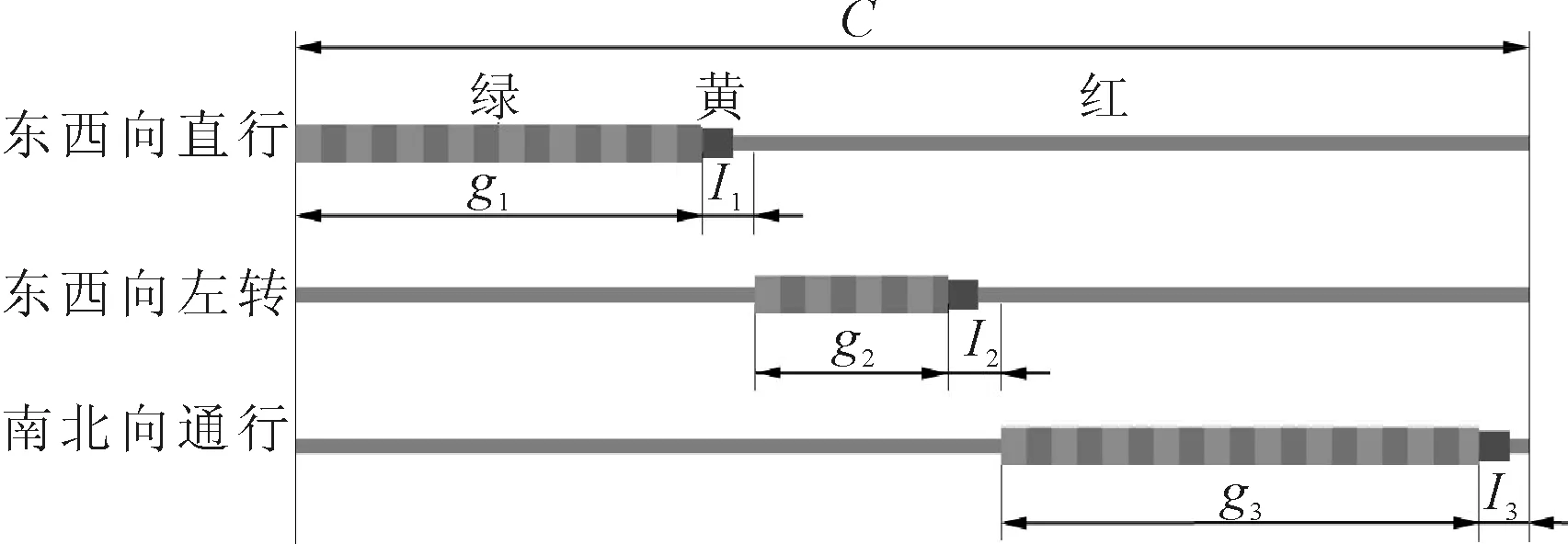
图6 交叉口信号配时图
延误是评价交叉口时空资源是否最佳配置的重要指标,也是应急车辆在信号交叉口实现优先控制的重要依据,其中红灯及排队延误是应急车辆交叉口延误的主要影响因素.以图1所示的三相位交叉口为例,其信号相位相序及其对应信号配时分别见图5~6,以排队车辆消散时间和红灯延误时间为计算对象建立应急车辆实时交叉口延误模型,文中以三相位交叉口为例,其他类型交叉口均可仿照得出各自的延误公式.
1) 若应急车辆东西向直行
(1)
2) 若应急车辆东西向左转
(2)
3) 若应急车辆在南北向行驶
(3)
此外,根据应急车辆请求方向上车道排队车辆数、车辆到达率及单车道通行能力,得到排队车辆消散时间τ为
(4)
式中:t为应急车辆在交叉口的延误时间;T*为应急车辆预计到达交叉口的时刻;C为信号周期时长;tc为T*除以C的余数;floor(·)为向下取整函数;[·]为红灯延误时间;gi,Ii(i=1,2,3)分别为各相位的绿灯时长及绿灯间隔时间;q,λ分别为应急车辆请求方向上车道的排队车辆数及车辆到达率;n为请求方向上的车道数;N为请求方向上单车道的饱和流量.
2.2.2 信号控制策略


图7 Δt所表示的时间段
1) 排队车辆未完全消散 该种情况的判断条件为应急车辆到达交叉口所经历的时间内有效绿灯时间小于应急车辆请求方向上排队车辆消散时间,即
(5)
应急车辆由此在交叉口产生的排队延误时间
(6)
与传统的信号优先控制策略不同,调整时间Δt中不仅要考虑交叉口行人过街安全与车辆行驶安全,还需考虑由可变导向车道转变导向所需的清空时间.应急车辆出发时刻,信号灯显示状态不同,Δt取值不同.
(1) 处于第二相位或第三相位期间 应急车辆出发时刻,信号处于第二相位或第三相位期间,时空优先控制策略中需插入可变导向车道原导向清空相位,Δt取值如下.
绿灯期间
(7)
绿灯间隔期间
(8)
(2) 处于第一相位期间 应急车辆出发时刻,信号处于第一相位绿灯期间,采取缩短红灯时间策略,Δt取值如下.
绿灯期间:
(9)
绿灯间隔期间:Δt取值与式(8)相同,其中i=1.
2) 排队车辆可完全消散 该种情况的判断条件为应急车辆到达交叉口所经历的时间内有效绿灯时间不小于应急车辆请求方向上排队车辆消散时间,即
(10)
其中Δt取值与排队车辆未完全消散情况下的取值相对应.该种情况下的示意图见图8.
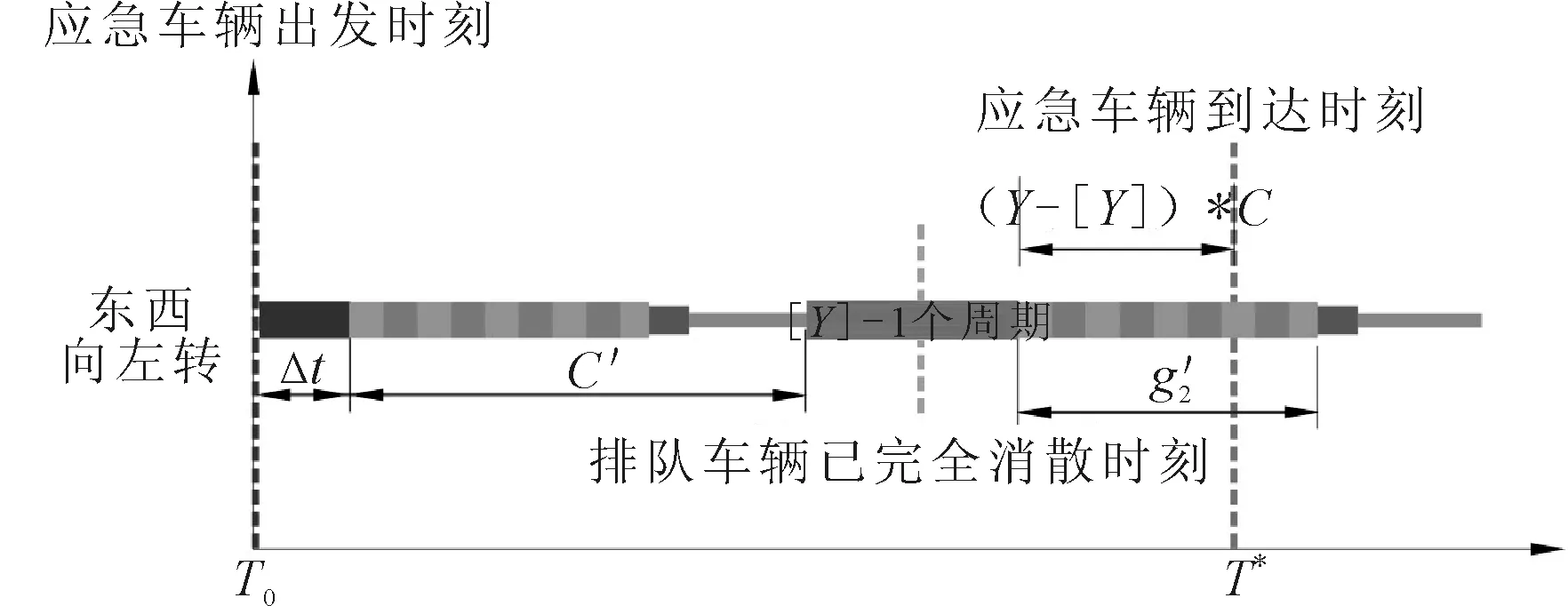
图8 可完全消散情况下请求方向上信号控制
图中[Y]是Y的向下取整数,Y计算公式为
(11)
为确保排队车辆在有效绿灯时间内完全消散,并保证应急车辆到达时刻能够实现绿灯通行,其相应约束条件如下.
(12)
应急车辆在交叉口的优先控制策略分为信号优先控制策略与时空优先控制策略,2种策略制定的目标均为应急车辆交叉口延误最小,若策略制定后应急车辆仍有延误,则采取延长绿灯时间或缩短红灯时间等配时方案,若策略制定后应急车辆无延误,则交叉口信号优化配时在满足式(12)的约束条件下,选取交叉口总延误最小的方案.根据 Webster 公式[11]可知,该配时方案的目标函数为
(13)
上述配时模型的求解属于非线性约束优化问题,即在多个自变量满足其约束条件情况下求解目标函数最值,选用Lingo软件对配时方案进行求解,该软件内置建模语言,输入模型简练直观,且具有运行速度快、计算能力强等特点.
3 实例分析
3.1 交叉口相关参数
为检验可变导向车道优先控制对应急车辆交叉口控制策略的影响,将分别制定信号优先控制方案及时空组合优先控制方案,对2种方案下应急车辆延误及交叉口总延误情况进行比较.选取某1交叉口J为研究对象,该交叉口渠化及初始相位情况见图9.

图9 交叉口J示意图
图9中初始信号控制从0刻开始执行,信号配时中各相位车辆启动损失时间LS、黄灯时长A、及绿灯间隔时间I均为3 s,即总信号周期时长为110 s,东西向可变导向车道原方向均为直行,交叉口其他相关渠化数据及由此得到的信号控制参数见表1,其中可变导向车道最长清空时间的计算中,车辆行驶速度为9 km/h.
此外,通过交通量调查统计并进行数据处理后,分别得到可变导向车道控制触发前后各相位的最大流量比,见表2.

表1 交叉口渠化相关参数

表2 交叉口各相位最大流量比计算
3.2 控制方案效果对比
为体现可变导向车道优先控制对交叉口控制策略影响的实时性,将分别从应急车辆到达交叉口J的不同时刻进行方案效果比较分析.假设应急车辆于16:30从急救中心出发,并预测于16:31或16:33到达交叉口J西进口道,欲进行左转.由计算知,应急车辆出发时刻,交叉口J信号状态为第一相位显示绿灯时间15 s,且通过调查,该时段各相位车辆到达率λi(i=1,2,3)分别为:1 787,406,715 pcu/h,应急车辆请求方向上车辆到达率λ为208 pcu/h,此外,假设通过智能手段测得进口道请求方向上排队车辆数为20辆.
1) 若应急车辆预测于16:31到达交叉口J 根据计算,在正常信控及2种不同优先控制策略下,请求方向上排队车辆消散情况及应急车辆延误时间对比见表3.
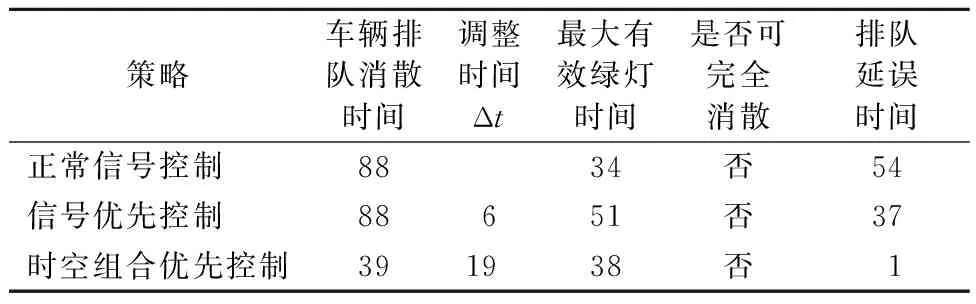
表3 不同策略下的应急车辆排队延误对比 s
由表3可知,若应急车辆出发时刻在交叉口J实施信号优先控制,其在该交叉口的延误可比正常信号控制时减少17 s,若实施时空信号优先控制,可比正常信号控制时减少53 s,减少时间约为信号优先控制的3倍.故该种情况下应触发可变导向车道优先控制,达到有效减小应急车辆交叉口延误的目的.
2) 若应急车辆预测于16:33到达交叉口J 同样,在正常信控及2种不同优先控制策略下,请求方向上排队车辆消散情况及应急车辆延误时间对比见表4.
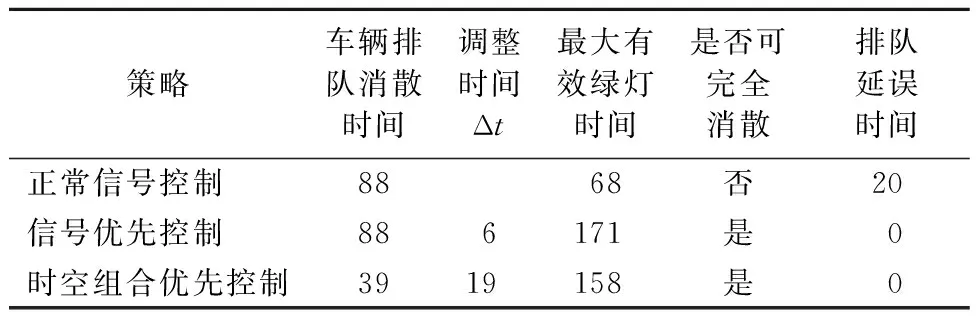
表4 不同策略下的应急车辆排队延误对比 s
由表4可知,该种情况下2种优先策略均满足应急车辆在交叉口无排队延误的目的,为得到两种策略下的最优信号配时方案,通过Lingo软件对信号配时模型求解,并与正常信号配时下的交叉口总延误进行比较,整理见表5.
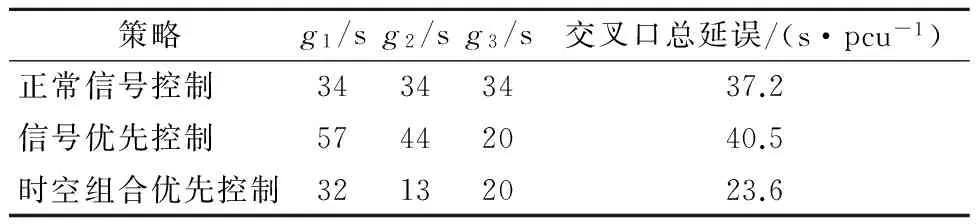
表5 不同策略下的交叉口总延误对比
2种优先控制策略下的方案目标是:在保证应急车辆无延误通过交叉口的前提下,达到交叉口总延误最小的目的,由表5可知,与正常信号控制相比,传统的信号优先控制方案会导致交叉口总延误上升,主要是由于为了降低应急车辆在交叉口的延误,对应急车辆请求方向上采用延长绿灯时间或缩短红灯时间的方法,势必会影响其他相位社会车辆的正常通行,增大交叉口的总延误;而时空组合优先控制方案在对应急车辆实行可变导向车道优先控制的同时,对其他相位的信号重新优化配时,使得交叉口总延误减小,减小幅度达36.6%,由此说明可变导向车道优先控制对应急车辆通行效率提高的重要性.
4 结 束 语
针对应急车辆,提出了“可变导向车道优先控制”的概念,通过分析交叉口应急车辆的延误类型,建立了交叉口车辆实时延误模型,并制定了对应的时空组合优先控制策略,根据交叉口排队车辆消散情况,以及应急车辆出发时刻交叉口的信号显示状态,分别给出了2种策略的信号控制方案,并在2种策略能够实现应急车辆无延误的前提下,以交叉口车辆总延误最小为目标,建立了多相位的信号优化配时模型.最后,基于城市路网,借助Lingo软件,以应急车辆排队延误及交叉口车辆总延误为评价指标,针对应急车辆不同的出发时刻,将2种优先策略的控制方案与正常信号控制方案进行了效果对比.对比结果表明,时空组合优先控制明显优于其他2种控制,能够有效提高应急车辆的通行效率,并减小对社会车辆通行的影响.
[1]OBENBERGER J T. Methodology to assess traffic signal transition strategies employed to exit preemption control[D]. Blacksburg: Virginia Polytechnic Institute and State University,2007.
[2]BACHELDER A, FOSTER C. System would predictively preempt traffic light for emergency vehicles[R/OL].[2014-03-09].http://www.nasatech.com/briefs/oct04/npo30573.html.
[3]田芳,王强.特种车辆绿灯畅行系统[J].黑龙江工程学院学报(自然科学版),2009,23(2):44-47.
[4]谢秉磊,胡正,赵航.交叉口应急车辆信号优先控制的两阶段模型[J].系统工程学报,2011(3):392-399.
[5]胡正.城市应急车辆信号优先控制与仿真研究[D].哈尔滨:哈尔滨工业大学,2008.
[6]宋辉华.基于多智能体的多应急车辆信号优先控制问题研究[D].哈尔滨:哈尔滨工业大学,2008.
[7]毕煦东.城市应急车辆优先通行关键问题研究[D].成都:西南交通大学,2014.
[8]National Highway Traffic Safety Inistration. Fatality analysis reporting system[R]. Washington DC: Department of Transportation,2002.
[9]SOO H Y. Towards the development of a decision support system for emergency vehicle preemption and transit signal priority investment planning[D]. Blacksburg: Virginia Polytechnic Institute and State University,2004.
[10]徐洪峰,郑明明,李克平.机动车相位固定最小绿灯时间计算方法[J].公路交通科技,2008,25(5):105-110.
[11]吴兵,李晔.交通管理与控制[M].北京:人民交通出版社,2009.
Research on Traffic Strategy of Emergency Vehicle Based on Variable Approach Lane
ZHAO Xin LI Can CHEN Shanshan
(SchoolofTransportation,WuhanUniversityofTechnology,Wuhan430063,China)
The concept of “variable approach lane priority control” to the emergency vehicle is put forward the vehicles’ real-time delay model is established and signal priority control and combination of space- time priority control strategy are set in this paper. Then on the condition that emergency vehicle has no delay at the intersection, the signal timing model of multiple phases is established to minimize total vehicle delay and the lingo software is used to solve the nonlinear constrained optimization problem. Simulation results show that, variable approach lane priority control strategy can significantly reduce the delay of emergency vehicle at intersection. Compared with the traditional signal priority control, this method can also reduce the influence on social vehicles’ delay and has better applicability.
emergency vehicle; variable approach lane; combination of space-time priority; control strategy
2016-12-14
*教育部留学回国人员科研启动基金项目资助(20131j0005)
U491.4
10.3963/j.issn.2095-3844.2017.01.002
赵欣(1979—):男,博士,副教授,主要研究领域为智能交通系统、进化算法及组合优化
猜你喜欢
建材发展导向(2021年19期)2021-12-06
小学生学习指导(低年级)(2021年4期)2021-07-21
作文周刊·小学一年级版(2020年40期)2020-10-19
小学生学习指导(低年级)(2018年9期)2018-09-26
学生天地(2018年18期)2018-07-05
娃娃乐园·3-7岁综合智能(2016年4期)2016-10-24
中国房地产业(2016年2期)2016-03-01
系统工程学报(2015年3期)2015-02-28
郑州大学学报(工学版)(2014年6期)2014-03-01
中国火炬(2010年5期)2010-07-25
