南水北调工程水平位移监测方法的分析与比较
2017-02-22 03:11赵义春王树宝艾明明中水东北勘测设计研究有限责任公司吉林长春130061
东北水利水电 2017年2期
赵义春,王树宝,艾明明(中水东北勘测设计研究有限责任公司,吉林长春130061)
南水北调工程水平位移监测方法的分析与比较
赵义春,王树宝,艾明明
(中水东北勘测设计研究有限责任公司,吉林长春130061)
文中对南水北调中线干线工程几种常用的水平位移监测方法,进行了系统的分析和比较,列出了这几种方法的原理,精度分析,优点以及不足等。对于在南水北调中线干线工程中进行水平位移监测方法的选取,具有一定的指导价值。
南水北调;水平位移监测;监测方法;分析
1 概述
南水北调中线干线工程自陶岔渠首至北京团城湖全长约1 277.212 km,天津干线自西黑山分水闸引出,至天津外环河出口闸长约155.273 km,总长1 432.485 km。其中,总干渠陶岔至北拒马河中支渠段采用明渠输水方式,北京、天津段采用管涵输水方式。
输水线路跨越长江流域、淮河流域、黄河流域、海河流域,沿线经过河南、河北、北京、天津二省二市。由于线路跨越流域和省市较多,形成了复杂多变的渠道类型。根据土质的不同,分为一般渠段、膨胀土渠段、高地下水渠段(砂砾石段)和石方段等;根据填挖的不同,分为高填方渠段、深挖方渠段、半填半挖渠段和普通渠段等。
为了监测深挖方渠段边坡的变形情况,在深挖方渠段布设水平位移测点。由于不同的水平位移测点类型和布设方法,形成了不同的水平位移监测方法。
2 水平位移监测方法
当渠道笔直或要监测垂直于渠道方向的位移时,可采用视准线法、距离收敛法等监测方法。但当渠道弯曲或需同时监测渠道两个方向位移时,可采用前方交会法或极坐标法。前方交会法主要有两种:测边前方交会法和测角前方交会法。另外还有一些困难条件下的水平位移监测方法。
2.1 视准线法
2.1.1 原 理
如下图所示,点A,B是视准线的两个工作基点(端点),1,2,3为水平位移监测点。监测时将全站仪置于A点,将仪器照准B点,竖直转动全站仪,分别转至1,2,3三个点附近,用游标卡尺或钢尺测得监测点至A—B这条视准线的距离。根据前后两次的测量距离,得出这段时间内水平位移量。

2.1.2 精度分析
由基准线的设置过程可知,监测误差主要包括仪器测站点仪器对中误差,视准线照准误差,读数照准误差,其中,影响最大的是读数照准误差。另外此方法还受到大气折光、仪器高和觇标高等因素的影响。
2.1.3 优 点
视准线监测方法原理简单、方法实用、实施简便、投资较少。
2.1.4 不 足
1)对较长的视准线而言,由于视线长,使照准误差增大,甚至可能造成照准困难。当视准线太长时,目标模糊,照准精度太差且后视点与测点距离相差太远,望远镜调焦误差较大,对监测成果有较大影响。
2)精度低,不易实现自动监测,受外界条件影响较大,而且变形值不能超出该系统的最大偏距值,否则无法进行监测。
3)视准线法的工作基点必须设置在位于变形体附近并且必须基本与测点在同一轴线上。由于南水北调渠道较长,两侧均为变形区域,很难做到此点。
2.2 前方交会法
如果变形监测点散布在渠道两侧或者在渠道两侧稳定区域内可以布设工作基择时,常用前方交会法来进行监测。
2.2.1 原 理
测角前方交会:
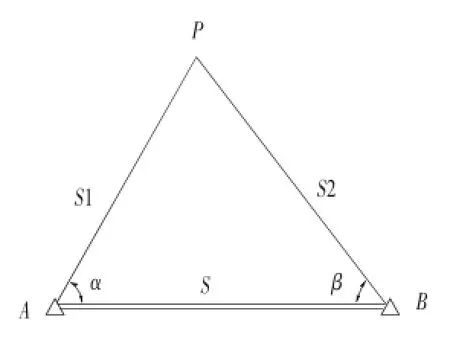
如上图所示:P表示监测点,A,B为工作基点。设A点坐标为(xA,yA),A2坐标为(xB,yB),P坐标为(xP,yP)。
分别在A点和B点安置全站仪,设一个点为定位点、另一个点为定向点,然后照准观测点P,分别测得交会角α,β,交会角应在30°~150°之间。根据公式:
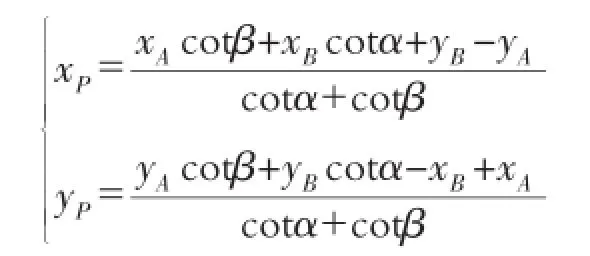
就可以计算出P点的坐标xP和yP。然后计算前后两次的测量坐标差值,得出这段时间内水平位移量。
测边前方交会:
如上图所示,用全站仪分别测得A到P点的平距为S1,测得B到P点的平距为S2,S为A至B之间的平距,直线AB的坐标方位角为αAB。根据公式:
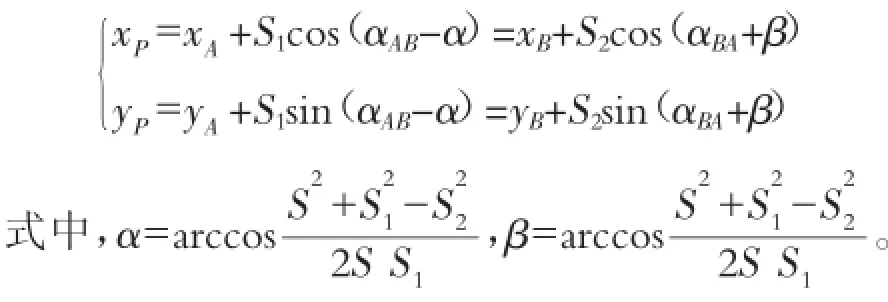
然后计算前后两次的测量坐标差值,得出这段时间内水平位移量。
2.2.2 精度分析
测角前方交会:
其监测P的点位中误差为:
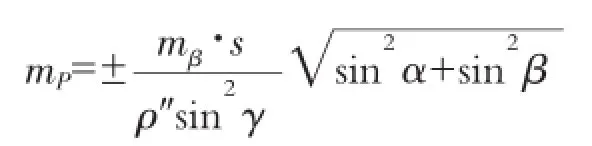
式中:mβ为测角中误差,ρ=206 265,γ=∠APB。当γ=90°时,点位中误差不随α,β的变化而变化;当γ>90°时,对称交会时的点位中误差最小,精度最高;当γ<90°时,对称交会时点位中误差最大,对精度不利。
测距前方交会:
设边长S1,S2的测距中误差为ms1,ms2,则监测P的点位中误差为:

2.2.3 优 点
1)工作基点布置有较大灵活性。前方交会法的工作基点可以适当远离变形体,所以工作基点的选择更为灵活。特别是当变形体附近难以找到合适的工作基点时,前方交会法更能显出其优点。
2)前方交会法能同时监测2个方向的位移。
3)监测耗时少。当测点较多,并分布在多条直线上时,前方交会法的耗时较视准线等方法少。
2.2.4 不 足
1)前方交会法由于受测角误差、测边误差、交会角及图形结构、基线长度、外界条件的变化等因素影响,精度较低。另外,其监测工作量较大,计算过程较复杂。
2)对于边长交会法,由于全站仪的测距精度包含固定误差和比例误差,当距离增加时其误差也会增大。在选择工作基点时,除要满足通视和工作基点的稳定性外,还须考虑工作基点与测点间的视距不要过长。
3)需要将位移量转化成垂直于渠道方向和顺水流方向的位移。
2.3 极坐标法
极坐标法属于边角交会,是边角交会的最常见的方法。

2.3.1 原 理
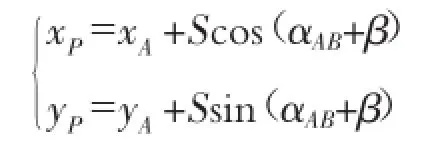
如上图所示:在已知点A安置仪器,后视点为另一已知点B,通过测得AB—AP的角度β以及A点至P点的距离S,计算得出P点坐标。设A点坐标为A(xA,yA),直线AB的方位角为αAB,则P点坐标P(xP,yP)的计算公式为:
2.3.2 精度分析
设测边中误差为mS,测角中误差为mβ,则监测点的点位中误差为:
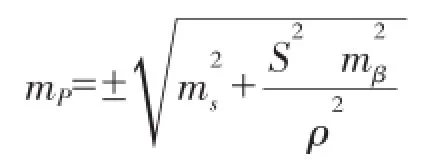
其中ρ=206 265。
2.3.3 优 点
操作方便,利用全站仪进行测量可以直接测得坐标,简单快速。
2.3.4 不 足
精度较低,适用于精度不是很高的水平位移监测工作;需要将位移量转化成垂直于渠道方向和顺水流方向的位移。
2.4 距离收敛法
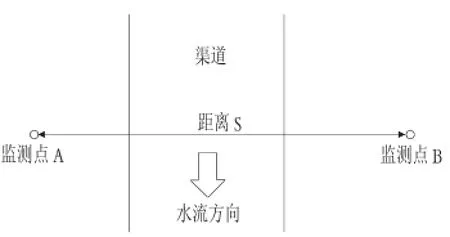
2.4.1 原 理
如上图所示,A,B为垂直于渠道方向的一对监测点,每次观测时测定AB的水平距离S。然后根据前后两次的测量距离,得出这段时间内这对监测点的位移量△S=S1-S2。
2.4.2 精度分析
由于该方法仅观测两个点间的水平距离,因此仅受到测距误差的影响。由于全站仪的测距精度包含固定误差和比例误差,当距离增加时其误差也会增大。
2.4.3 优 点
1)操作方便,利用全站仪进行测量可以直接测得水平距离,简单快速。
2)无需工作基点,也无需测量监测点的坐标。
2.4.4 不 足
1)由于是观测一对监测点的相对距离,因此只能得出垂直于渠道方向的位移情况,无法确定沿渠道方向的位移。
2)由于两个点都是监测点,都处于变形区域内,都存在位移,因此无法确定一对监测点中具体是哪个点发生了位移。
3)对监测点布设要求较高,监测点需要成对布设,且一对监测点的连线要垂直于渠道。
3 结论
综上所述,对于上面的每一种方法,都有自己的特点,在选用水平位移测量方法的时候,既要考虑到精度,可行性,也要考虑经济、效率等方面的问题。在满足精度要求的前提下,尽量使用简单实用经济的方法。对于不同的现场,有不同的特点,不一定采用一种方法,可以采用两种或者两种以上方法结合来进行水平位移的监测。
[1]王志明.几种水平位移监测方法的分析和比较[J].上海建设科技,2008.
[2]王铁生,袁天奇.测绘学基础[M].北京:科学出版社,2008.
[3]刘成龙.极坐标法测量精度评定方法的研究[J].铁道学报,1996.
TV698.1
B
1002-0624(2017)02-0001-03
2016-10-24
猜你喜欢
中学数学研究(江西)(2022年5期)2022-05-08
工程与建设(2019年3期)2019-10-10
当代水产(2019年1期)2019-05-16
太空探索(2016年9期)2016-07-12
电测与仪表(2016年9期)2016-04-12
创业家(2015年1期)2015-02-27
淮北师范大学学报(自然科学版)(2014年4期)2014-07-04
河南科技(2014年22期)2014-02-27
河南科技(2014年5期)2014-02-27
福建中学数学(2013年1期)2013-03-06