
防止无人机起落架影响视场的可翻转支架研究*
2017-02-14 09:22周树道施伟来
网络安全与数据管理 2017年2期
王 敏,周树道,严 卫,施伟来,贾 赟
(1.解放军理工大学 气象海洋学院,江苏 南京 211101;2.南京信息工程大学气象灾害预报预警与评估协同创新中心,江苏 南京 210044)
防止无人机起落架影响视场的可翻转支架研究*
王 敏1,2,周树道1,2,严 卫1,施伟来1,贾 赟1
(1.解放军理工大学 气象海洋学院,江苏 南京 211101;2.南京信息工程大学气象灾害预报预警与评估协同创新中心,江苏 南京 210044)
针对折反射式全景相机获取全方位图像时,由于无人机起落架的遮挡,造成图像获取要素不完整的问题,设计了一种防止无人机起落架影响全景相机视场的可翻转支架系统。通过采集无人机离地距离和飞行状态调节全景相机镜头的位置,可以防止无人机起落架落入图像内,使得采集要素的完整性达到了100%,提高了采集的图像质量;同时可以根据无人机的起落距离,对全景相机进行翻转收放,避免镜头与地面相接触,有效保护了镜头。
无人机;起落架;折反射式全景相机;可翻转支架
0 引言
全景成像利用特殊的成像装置能从一个视点获取水平方向一周360°、垂直方向达到半球以上视场的多方向图像,由于成像范围大、成像快等特点,可为军事侦查、机器人导航、虚拟现实、计算机视觉等领域提供大视场场景的立体感知和重现功能,近年来发展快速,成为光电子学、计算机视觉和计算机图形学的研究热点。
目前为止,主要有三种实现全景成像的方法:图像拼接法、鱼眼镜头法和折反射全景成像法[1]。基于图像拼接的全景成像方法之一是使相机绕通过其光心的垂直轴线旋转对多个方向的场景成像,再将这些不同方向的场景图像拼接成一幅全景图。这种方法,虽然成像分辨力高,但成像速度慢,拼接算法复杂,一般只能拼接出柱面全景图像,不能满足单一视点要求,且成本高,系统复杂,不能满足实时全景成像的需要。鱼眼镜头在获得大视场的同时又有其缺点,即会产生严重的桶形畸变,很难校正,且成像分辨率低。高质量的鱼眼透镜通常采用10片以上的结构和高质量的光学材料,因此系统复杂,造价成本昂贵。折反射式全景成像技术由于具有一次性大范围成像特点,实时性能优,并且结构简单、无扫描部件,无拼接,因而可以作为替代现有航空全景相机的重要技术。但由于无人机起落架的存在,使得折反射式全景相机在获取全方位图像时,总是存在由于起落架的遮挡而造成图像获取要素不完整、成像质量不高等问题。
本文设计了一种防止无人机起落架影响全景相机视场的可翻转支架系统,通过超声波传感器测量机体离地安全距离后,微处理器控制全景相机及支架的上下翻转,可以防止全景相机进行全景图像采集时无人机起落架落入图像内,提高图像采集要素的完整性和图像的质量,获取全方位无起落架干扰的全景图像。
1 无人机起落架对全景相机视场的成像影响
通常,无人机折反射全景成像系统由无人机、折反射全景相机和数据处理单元等组成,如图1所示。折反射全景相机成像可以获得水平方向360°、垂直方向210°的大视场场景图像。折反射全景相机通常置放于无人机机身正下方,但由于无人机两侧起落架的位置低于全景相机,导致全景图像始终出现该起落架,影响图像的进一步解读,如图2所示。

图1 无人机全景成像系统组成结构图
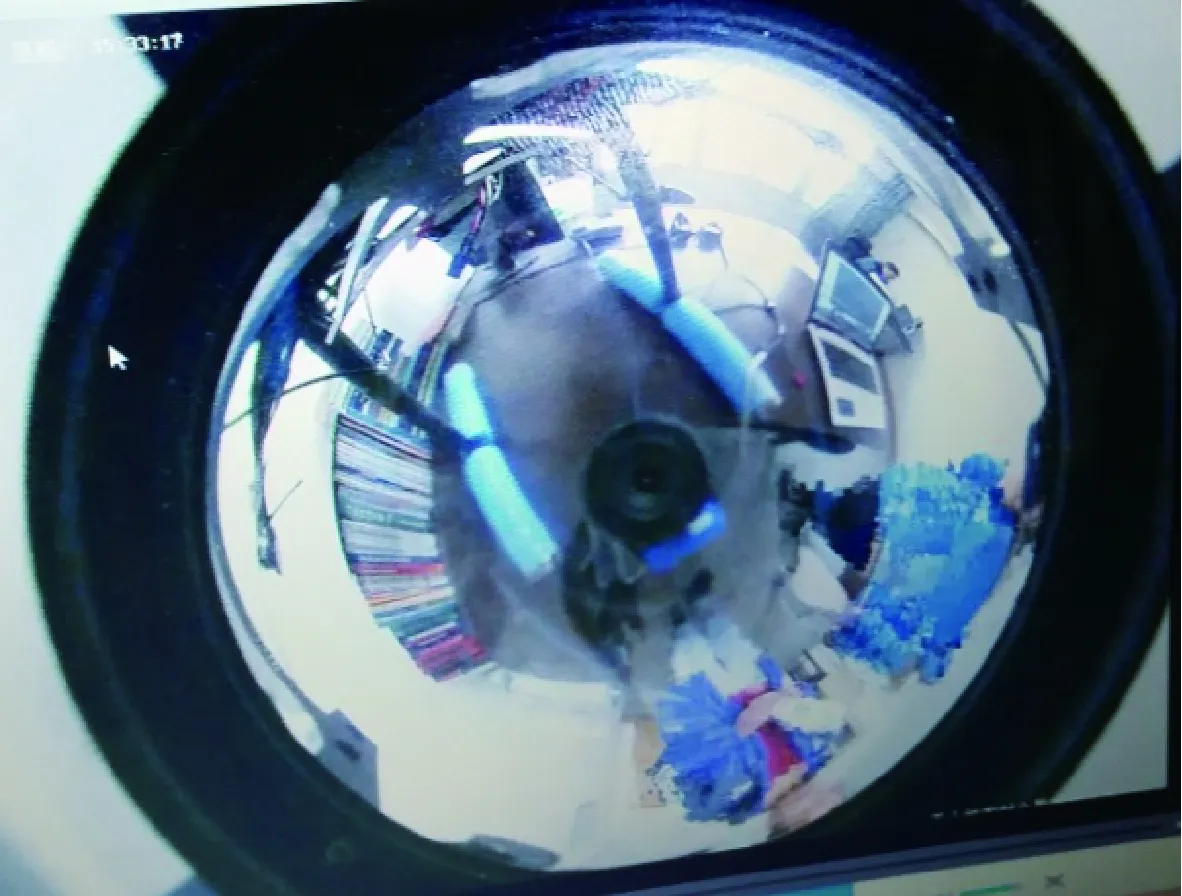
图2 无人机起落架对全景成像影响图
2 可翻转支架系统组成
防止无人机起落架影响全景相机视场的可翻转支架系统由超声波测距传感器模块、步进电机模块、中央处理器模块、全景相机及支架模块和电源模块组成[2-3],如图3所示。其中,超声波测距传感器模块用来测量无人机机体底部距离地面的垂直距离[4-5],步进电机[6]模块用来驱动全景相机及支架模块的垂直180°翻转,中央处理器模块[7]根据超声波测距传感器模块测量的距离信息控制步进电机模块的正反转,电源模块用来为系统供电。全景相机置放于起落架底部相交的回转轴的中部,通过滚动轴承进行上下翻转。

图3 可翻转支架系统组成图
可翻转支架系统的结构布局为:将全景相机的相机托盘放置于回转轴正中位置,回转轴通过滚动轴承和连接件连接于无人机起落架的两侧底端,步进电机、中央处理器、超声波测距传感器和电源等封装于一壳体内,其中超声波测距传感器指向无人机正下方,该壳体放置于一侧起落架外侧底端,具体结构布局如图4所示。
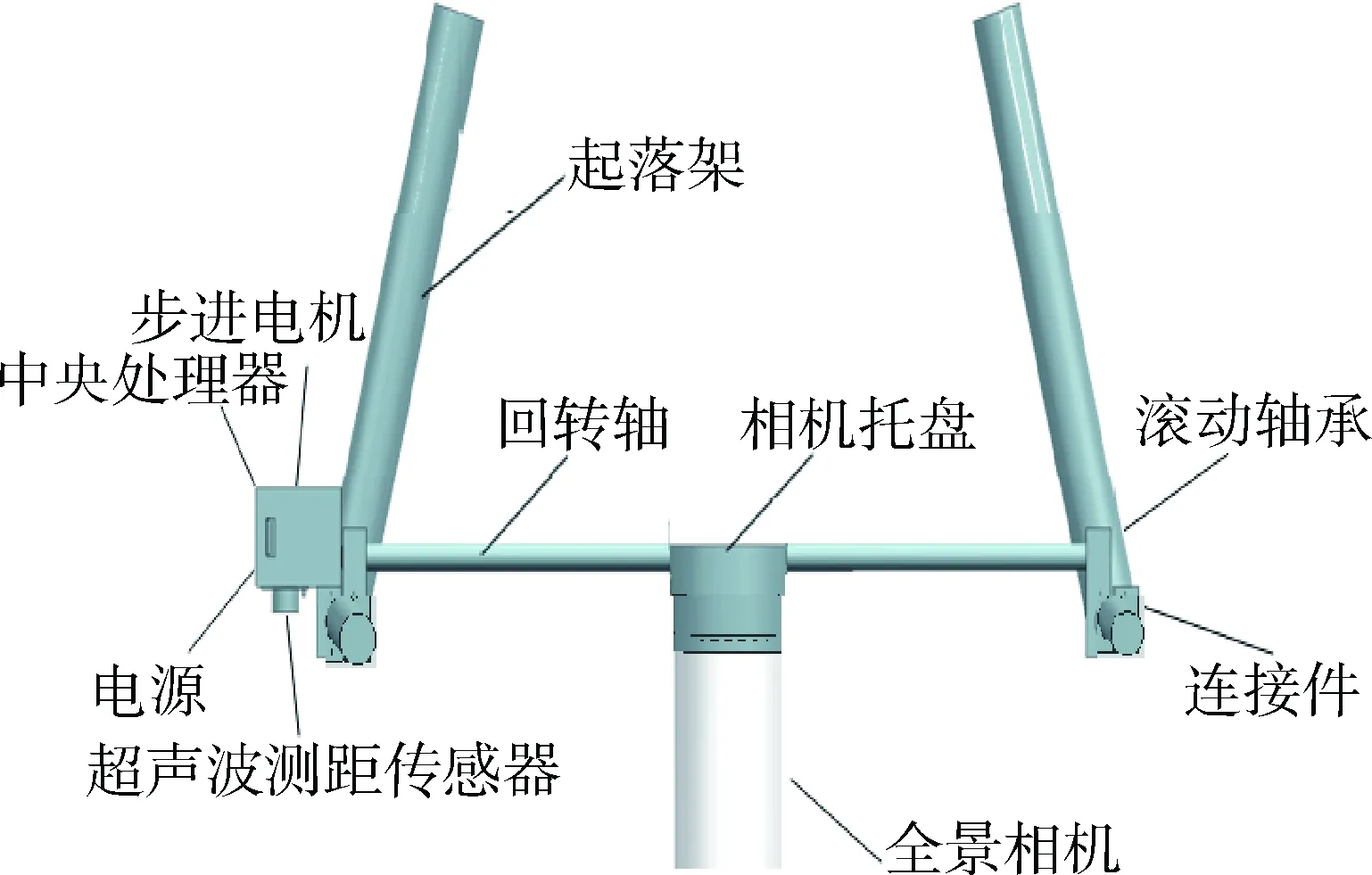
图4 可翻转支架系统结构图
3 可翻转支架系统工作过程
防止无人机起落架影响全景相机视场的可翻转支架系统工作过程如下:
(1) 无人机停止飞行状态下,全景相机镜头默认保持垂直向上初始位置,如图5所示。
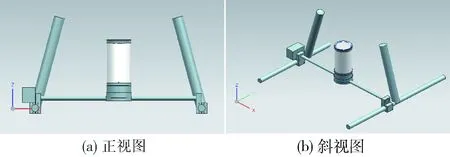
图5 全景相机初始向上位置图
(2)无人机飞离地面后,超声波测距传感器测量距地面间的垂直距离大于4 m时,中央处理器模块发出信号控制步进电机模块,使步进电机开始正转工作,驱动全景相机及支架模块开始向地面方向翻转180°,如图6所示。
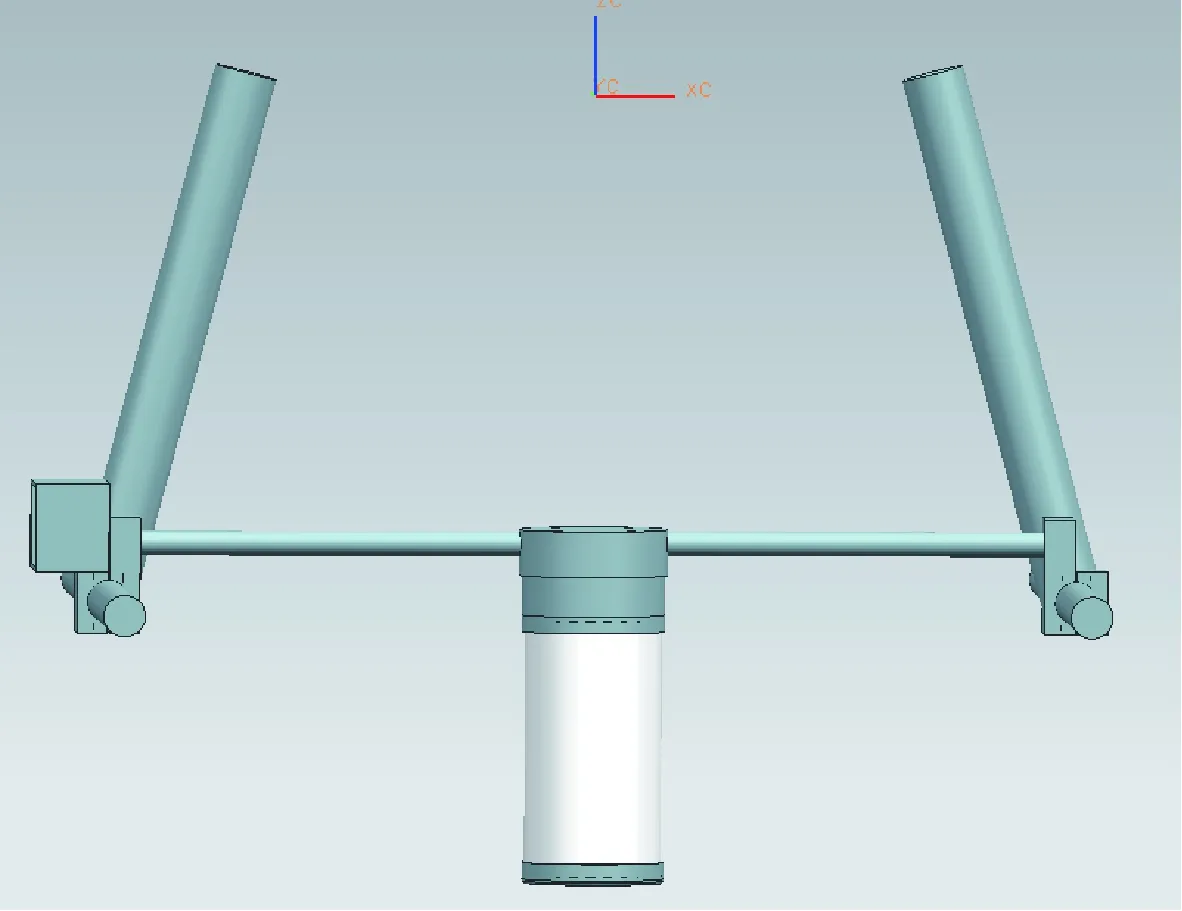
图6 全景相机翻转向上工作位置图
(3)无人机返回地面前,超声波测距传感器测量距地面间的垂直距离小于4 m时,中央处理器模块发出信号控制步进电机模块,使步进电机开始反转动作,驱动全景相机及支架模块开始向无人机方向转动180°,相机回到初始位置,直到无人机降落至地面。
4 结论
本文设计的可翻转支架系统,根据离地距离和无人机飞行状态调节全景相机镜头进行翻转,有效防止无人机起落架落入图像,同时保护镜头避免损伤,大幅提高了图像采集要素的完整性,为进一步的图像释读奠定了基础。
[1] 王敏,周树道,张水平,等. 全景立体成像技术浅述[J].信息技术,2014(5):24-27.
[2] 王祁. 智能仪器设计基础[M]. 北京:机械工业出版社, 2010.
[3] 姚锡凡.人工智能技术及应用[M].北京:中国电力出版社,2008.
[4] 李航,王可人. 基于STC89C52RC的超声波测距系统设计[J]. 电子测试,2010(1):55-58.
[5] 张银霞,魏振春,张儒瑞,等.基于超声波定位的机车监控与导航系统[J].计算机技术与应用进展,2009(12):1057-1060.
[6] 曹承志.电机、拖动与控制[M].北京:机械工业出版社,2000.
[7] 楼然苗,李光飞,等.51系列单片机设计实例[M].北京:北京航空航天大学出版社,2003.
周树道 (1964-),男,硕士,教授,主要研究方向:成像技术。
The study of overturn bracket to prevent the UAV landing gears impaction on the panoramic camera
Wang Min1,2, Zhou Shudao1,2, Yan Wei1,Shi Weilai1, Jia Yun1
(1. Institute of Meteorology and Oceanography, PLA University of Science and Technology, Nanjing 211101, China;2. Collaborative Innovation Center on Forecast and Evaluation of Meteorological Disasters,Nanjing University of Information Science & Technology, Nanjing 210044, China)
Aiming at the problem that when the panoramic images are got by the panoramic camera, they are shield by UAV landing gears, and the image acquisition elements are incomplete, the overturn bracket system to prevent the UAV landing gears impaction on the panoramic camera is proposed. The distance between the ground and the u4v and flight state of UAV are used to adjust the position of the panoramic camera, and prevent the landing gears into the image. The integrity of the collected factors reached 100%, and the quality of the image is improved integrity. At the same time, the UAV landing distance is used to turn and fold the panoramic camera, and avoid contact with the ground, and the lens is protected effectively.
UAV; landing gears; catadioptric panoramic camera; overturn bracket
TN942.2
A
10.19358/j.issn.1674- 7720.2017.02.011
王敏,周树道,严卫,等.防止无人机起落架影响视场的可翻转支架研究[J].微型机与应用,2017,36(2):32-33,40.
国家自然科学基金(41301370)
2016-07-27)
王敏(1983-),通信作者,女,博士,副教授,主要研究方向:成像技术、数字图像处理。E-mail:yu0801@163.com。
猜你喜欢
现代电子技术(2022年18期)2022-09-17
科学技术创新(2021年25期)2021-09-11
中原商报·科教研究(2021年6期)2021-05-13
家庭影院技术(2020年11期)2020-12-28
百科探秘·航空航天(2020年8期)2020-07-29
军民两用技术与产品(2019年12期)2020-01-19
中国医疗设备(2019年1期)2019-01-15
英美文学研究论丛(2018年1期)2018-08-16
家庭影院技术(2017年12期)2017-02-06
特别文摘(2016年21期)2016-12-05
