一种自动翻转吊卡的研制
2017-02-09 06:24江连会周斌谭跃刚黄安贻王雄王龙渤
石油钻采工艺 2017年6期
江连会 周斌 谭跃刚 黄安贻 王雄 王龙渤
1.武汉理工大学机电工程学院;2.荆州市明德科技有限公司;3.中国石化石油工程机械有限公司研究院;4.渤海钻探工程有限公司管具技术服务分公司
随着我国多数油田都已进入了原油开采的中、后期阶段,修井作业也随之越来越繁重。为降低工人的劳动强度,增加操作安全性,修井作业自动化研究成为目前研究的热点[1-3]。起下管柱作业是修井作业中最常见的作业形式,吊卡是起下作业中最关键的装置之一。目前修井作业吊卡的操作主要还是以人工为主,工人劳动强度高、安全性低。自动吊卡可以降低工人的劳动强度,增加操作安全性,成为了国内外研究开发的重点。目前国内外自动吊卡主要是液压翻转式吊卡[4-9]。根据我国修井作业装备情况,为节省成本,在手动吊卡基础上,研制了气压翻转式自动吊卡。
1 自动吊卡结构和参数
Structure and parameters of automatic elevator
1.1 结构
Structure
自动吊卡主要由吊卡体、活页、翻转机构、活页开关机构、上锁舌开关机构和下锁舌开关机构等组成,结构如图1所示。活页开关机构用于推动活页关闭和打开,实现油管的卡住和释放。上锁舌开关机构和下锁舌开关机构实现活页与吊卡的锁死和解锁,保证起吊油管的安全性。翻转机构实现吊卡的翻转,方便吊卡卡住油管。支架用于保护和支撑上述机构。
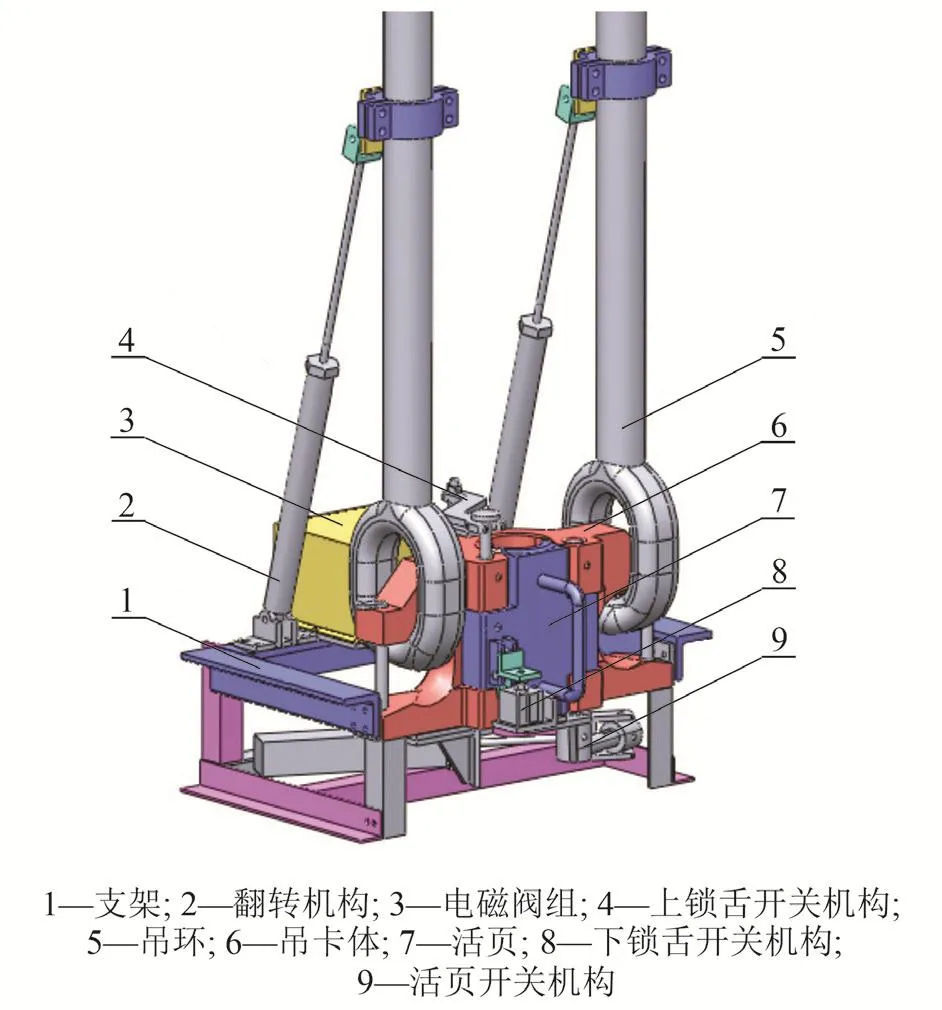
图1 自动吊卡结构示意图Fig. 1 Schematic structure of automatic elevator
1.2 主要设计参数
Main design parameters
自动吊卡的重量为77.5 kg,自动吊卡在图1位置时的长宽高为660 mm×482 mm×1 180 mm,活页最大旋转角度为100°,吊卡最大翻转角度为75°,额定载荷为4 000 kN,适用油管外径73.02 mm。
2 翻转机构
Turnover mechanism
翻转机构是自动吊卡最主要的部件之一。当自动吊卡处于如图1所示的垂直位置时,翻转机构运动简图如图2所示。在图1位置时,翻转机构的长宽高为660 mm×482 mm×950 mm。气缸收缩时,带动吊卡体翻转;气缸伸长时,带动吊卡体返回,最终到垂直位置。根据自动吊卡的几何空间布局,D、C点的位置是确定的,A点竖直方向的位置也是确定的,A点水平方向的位置可在一定范围内变动,优化A点水平方向的位置让翻转机构的性能达到最优。

图2 翻转机构运动简图Fig. 2 Schematic movement of turnover mechanism
吊卡翻转的目的是顺利抓取从猫道等拉排管装置送上的油管。在不同修井工况下,猫道等拉排管装置送上油管的倾斜角度(油管与水平面的夹角)范围一般为5~35°。当吊卡轴线与油管轴线平行且吊卡与油管贴合时,关闭吊卡活页可以顺利实现油管的抓取。由于猫道等拉排管装置送来的油管倾斜角度不同,抓取油管时,调整吊卡轴线倾斜角度与油管轴线倾斜角度一致的方法有两种。(1)通过检测和控制系统调整吊卡的翻转角度与油管的倾斜角度一致,这样做对控制系统的要求高,相应的成本比手动吊卡也会增加很多。(2)根据观察,井口操作人员在翻转吊卡时,并没有和猫道等拉排管装置送上来的油管的倾斜角度完全一致,吊卡在重力的作用下自动和油管吻合,利用这一现象,根据猫道等拉排管装置送上的油管倾斜角度的范围,我们把吊卡的翻转角度定为75°,当吊卡的前部和油管接触后,释放翻转机构,吊卡在重力的作用下,完全和油管吻合,从而可以实现油管的抓取,这样做既可以实现油管的抓取,控制系统也较简单,相比手动吊卡成本增加不大。通过比较,选择第2种方式实现油管的抓取。
3 翻转机构运动学与动力学仿真
Kinematics and dynamics simulation of turnover mechanism
利用CAD软件建立自动吊卡的虚拟设计模型,如图1所示,然后把该模型导入到ADMAS软件中,将摩擦系数设置为0.3,气缸的拉力和推力设置为994 N,分别对A点在水平方向的五个位置对翻转机构进行运动学和动力学仿真分析。
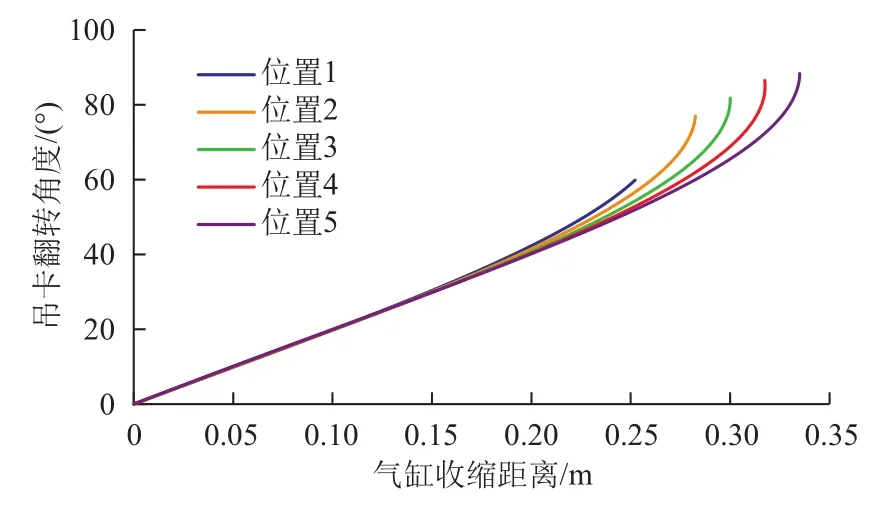
图3 气缸收缩距离与吊卡翻转角度关系曲线Fig. 3 Relationship between the shrinkage distance of cylinder and the turnover angle of elevator
图3为A点在水平方向不同位置时,气缸收缩距离和吊卡翻转角度的关系曲线。水平位置1时(如图中曲线1所示),初始条件下,气缸最大收缩250 mm,对应吊卡的最大翻转角度为60°,达不到最大翻转角度为75°的要求。位置2~5都可以达到吊卡翻转75°的要求。位置2吊卡的最大翻转角度为77°左右,考虑扰动的影响,也予以排除,位置3~5都能够实现吊卡稳定翻转75°的要求。
图4为吊卡翻转角度、角速度和角加速度曲线图。从图中曲线可以看出,位置3(对应图中曲线3)的翻转速度较快,翻转较稳定。因此确定位置3(如图2)为A点的最终水平位置。位置3的最大翻转角度为82.2°,在0.21秒时达到最大翻转角度,气缸收缩的距离为299.9 mm。
4 实验
Experiment
依据优化结果,设计制作了自动吊卡装置。在994N气缸力的作用下,吊卡最大翻转角度为79.6°,在0.22秒时达到最大翻转角度,最大翻转角度时,气缸收缩的距离为295.6 mm。吊卡最大翻转角度误差为3.16%,仿真结果与实验结果误差较小,在允许范围内。
在现场环境进行了实验:翻转机构翻转平稳、快速;吊卡门开关机构开闭稳定、迅速;可以顺利抓取与水平面夹角为0°~50°、直径为73.02系列的油管;锁舍启闭灵活,保证了吊卡的安全。操作人员远离吊卡遥控操作,保证了操作人员的安全。实验数月,运行一直平稳。
5 结论
Conclusions
在手动吊卡的基础上,加装自动执行机构,实现了手动吊卡到自动吊卡的升级。应用Admas软件,对自动吊卡的翻转机构进行了优化设计。依据优化结果,制作了自动吊卡装置,并进行了翻转实验,仿真结果与实验结果非常接近。应用Admas软件对设计模型进行仿真并优化,可以减少实验装置的制作,节约成本。
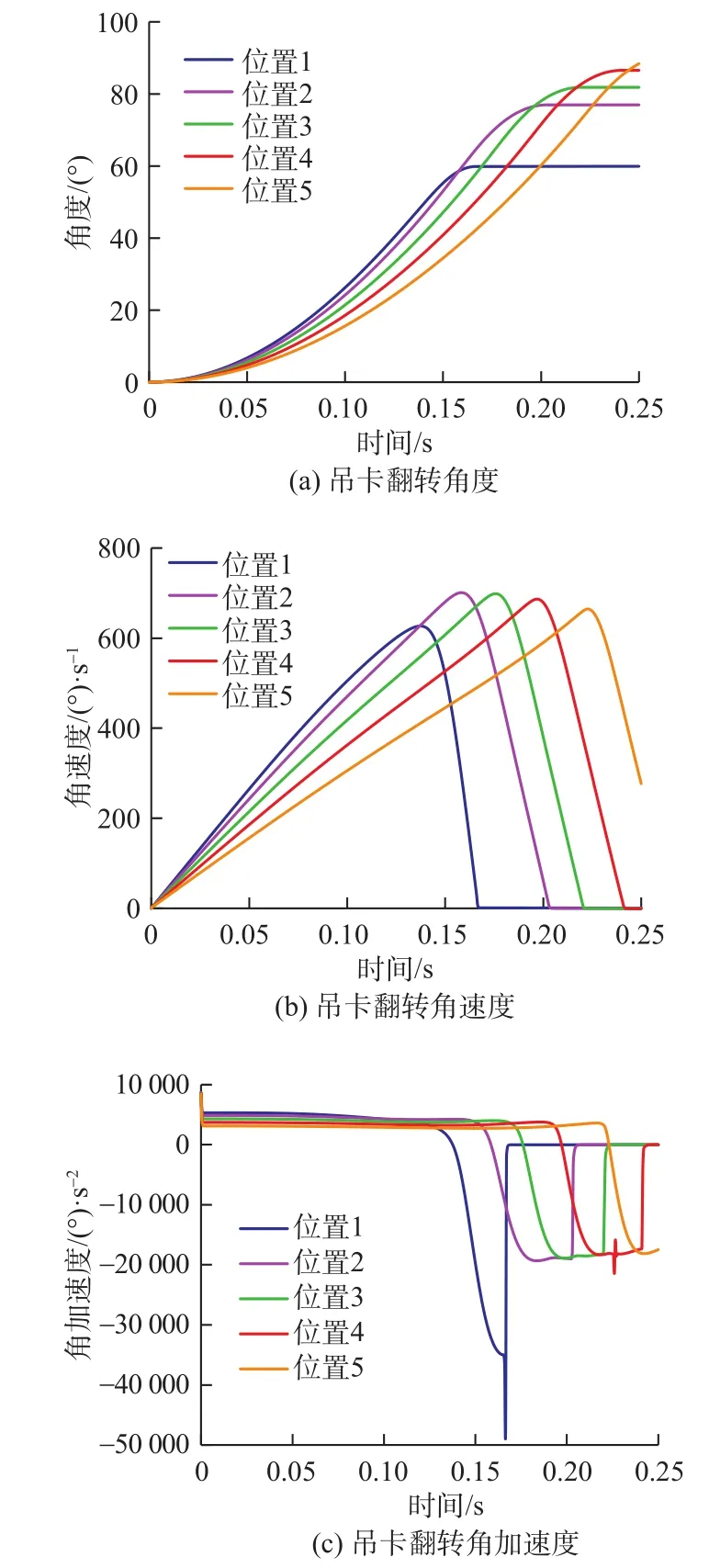
图4 吊卡翻转运动学曲线Fig. 4 Kinematics curve of the turnover of elevator
[1]耿玉广,谷全福,王树义,曾良军,孙连会,李宝军. 修井作业井口无人操作起下油管装置[J]. 石油钻采工艺,2014,36(6):116-121.
GENG Yuguang, GU Quanfu, WANG Shuyi, ZENG Liangjun, SUN Lianhui, LI Baojun. A device of pulling and running tubing string for workover with unmanned wellhead operation[J]. Oil Drilling & Production Technology, 2014, 36(6): 116-121.
[2]高广启. 升降式油管枕的研制与应用[J]. 石油钻采工艺,2014,36(6):122-124.GAO Guangqi. Development and application of jack-up tubing stand[J]. Oil Drilling & Production Technology,2014, 36(6): 122-124.
[3]中国石油天然气股份有限公司. 起下油管井口无人操作系统的推拉机械手:中国,201120558063. 0 [P].2012-08-15.
PetroChina Company Limited. Push-and-pull machine hand for pulling and running tubing string of workover with unmanned wellhead operation: China, 201120558063. 0[P]. 2012-08-15.
[4]高胜,孙冠,常玉连,任福深,陈玉. 动力开合吊卡的平衡分析与研究[J]. 石油机械,2011,39(6): 29-32.
GAO Sheng, SUN Guan, CHANG Yulian, REN Fushen,CHEN Yu. Balance analysis and research for power elevator[J] . China Petroleum Machinery, 2011, 39(6):29-32.
[5]孙冠. 动力吊卡设计与运动仿真[D]. 大庆:东北石油大学,2011:4-8.
SUN Guan. Design and motion simulation of power elevator[D]. Daqing: Northeast Petroleum University,2011: 4-8.
[6]魏凯. 新型筒式自动吊卡设计及理论分析[D]. 大庆:东北石油大学,2012: 6-9.WEN Kai. New cylinder automatic elevator design and theoretical analysis [D]. Daqing: Northeast Petroleum University, 2012: 6-9.
[7]何鸿,闫永宏,王德贵,祝贺. 液压自动吊卡技术现状及发展建议[J]. 石油机械,2012,40(8):29-34.
HE Hong, YAN Yonghong, WANG Degui, ZHU He.Current situation of the hydraulic automatic elevator thechnology and suggestions on development [J]. China Petroleum Machinery, 2012, 40(8): 29-34.
[8]祝贺,栾苏,杨艳,阎永宏,董毅军,王德贵. 液压翻转式吊卡的研制[J]. 石油机械,2014,42(11):35-37.
ZHU He, LUAN Su, YANG Yan, YAN Yonghong, DONG Yijun, WANG Degui. Development of the hydraulic rotary elevator [J]. China Petroleum Machinery, 2014, 42(11):35-37.
[9]山东胜利石油装备产业技术研究院. 一种全自动吊卡:中国,201510363529. 4 [P]. 2015-09-23.
Shandong shengli petroleum equipment industry technology research institute. A kind of automatic elevator: China, 201510363529. 4 [P]. 2015-09-23.
猜你喜欢
辽宁省交通高等专科学校学报(2022年5期)2023-01-03
化工管理(2022年14期)2022-12-02
九江职业技术学院学报(2022年1期)2022-12-02
汽车实用技术(2022年9期)2022-05-20
云南化工(2021年5期)2021-12-21
装备制造技术(2021年1期)2021-05-21
钢管(2021年6期)2021-05-10
化工设计通讯(2021年2期)2021-01-07
山东工业技术(2016年15期)2016-12-01
中国音乐教育(2015年9期)2015-05-16