
基于差值放大法的锚固面位移监测系统
2017-02-09 05:52蓝章礼周建庭姚进强
重庆交通大学学报(自然科学版) 2017年1期
蓝章礼,田 源,周建庭,姚进强
(1.重庆交通大学 信息科学与工程学院,重庆 400074;2.重庆交通大学 土木工程学院,重庆 400074)
基于差值放大法的锚固面位移监测系统
蓝章礼1,田 源1,周建庭2,姚进强1
(1.重庆交通大学 信息科学与工程学院,重庆 400074;2.重庆交通大学 土木工程学院,重庆 400074)
通过对悬索桥锚固面特征的研究,设计了一种差值放大装置,结合图像处理技术,提出一种基于活塞装置的位移差值放大法来监测锚固面位移的测量系统。介绍了系统的组成和测量原理,通过图像分割、圆拟合、位移转换等获得锚固面蠕变数据。对测量系统镜头畸变误差和非垂直安装误差进行分析并阐明解决措施。实验结果表明:当蠕变范围为-1.2 cm~+1.2 cm时,其测量误差可以控制在3.5%以内。
桥梁工程;悬索桥;锚固面;位移;测量系统;差值放大
现代悬索桥结构的主要组成部分有吊杆、主缆、索塔、加劲梁、锚碇等[1]。其中,锚碇结构是支撑主缆的主要部分,锚固面为锚碇结构的承重面,因此评判锚碇结构所在的锚固面的位移情况,是直接判断桥梁健康与否的重要标志之一。对桥梁结构应力进行监测[2],需要布设许多智能传感器、光纤光栅等。1993年加拿大卡尔加里附近的Beddington Trail大桥成为最早使用光纤光栅传感器进行测量的桥梁之一[3]。虽能够取得相关响应参数,但是设备非常昂贵;若只对于结构位移进行监测,则需在锚固面中设置少数的监控点就可以监测锚固面的位移情况从而反演出桥梁的安全状况。
目前桥梁动态监测的方法主要有微波干涉法[4]、光纤传感器监测法[5]、GPS(global positioning system)系统监测法[6-7]、连通管监测法[8-9]等。但针对桥梁锚固面位移监测常见的方法有激光图像测量法[10]、压力差法[11]。利用激光进行锚固面位移监测的方法中,激光器易发生扭转和衰减,不适合长期监测;利用压力差进行锚固面位移监测的方法不适合于较深的隧道。
水蚀环境会改变锚碇的受力与变形,从而降低隧道式锚碇围岩与重力式锚碇基础的稳定性[12-13]。笔者通过对三峡库区蓄水后的丰都、忠县长江大桥锚室实地考察后提出一种可行的锚碇结构位移监测方法。
1 系统原理
1.1 系统组成
系统由差值放大装置、图像采集仪、装有专用软件的工控机、无线传输设备及连接装置组成,如图1。
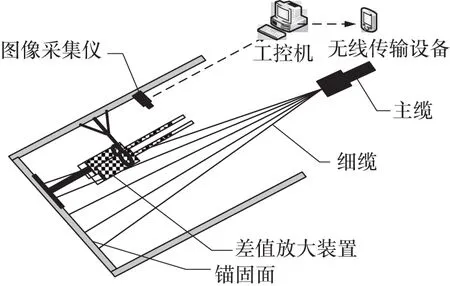
图1 系统组成Fig.1 Structure of the system
测量之前,首先用支架固定差值放大装置于锚固面上,差值放大装置的两组盛液器保持平行安装;图像采集仪安放于锚固面四周的弧形墙壁上,通过数据线与工控机相连,且工控机又与无线传输设备相连以发送采集的数据。图像采集仪镜头与差值放大装置的两根平行放置玻璃管必须保持垂直状态,调整摄像头的焦距,使其能在工控机上清晰地显示标定样本。
1.2 差值放大装置
如图2,差值放大装置由结构相同的测定活塞组件和基准活塞组件组成,测定活塞组件包括第1盛液器,与第1盛液器顶部连通的带有精密刻度的第1玻璃管和设置在第1盛液器内的活塞;活塞底部与活塞连接杆一端固连,第1盛液器底部具有使活塞连接杆的另一端穿过且与其密封配合的通孔;第1盛液器的内径是第1玻璃管直径的N倍。基准活塞组件与测定活塞组件相比,除了没有活塞连接杆外,其余装置都相同;且第1玻璃管与第2玻璃管管轴之间的平行距离为固定值d。
测量时,向两根平行玻璃管内注入相同体积的无色不易挥发液体且不能超过测量刻度的最大值,分别往两组液体中投放一颗经过特殊处理的圆形悬浮球,以便图像采集仪抓拍。
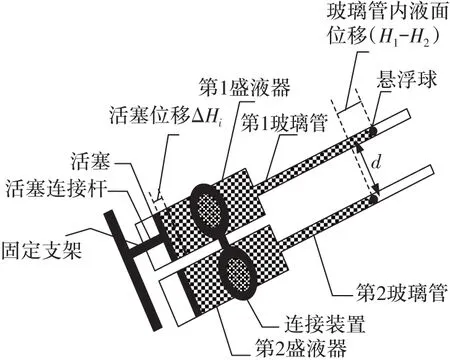
图2 差值放大装置Fig.2 Differential amplifying device
1.3 测量原理
当锚固面受力变化而发生前后蠕动时,测定活塞组件中的活塞随之移动位移ΔHi,进而影响测定活塞组件中的第1玻璃管内的液面高度发生变化(设第一玻璃管内液面高度为H1)。基准活塞组件除了无活塞连接杆与锚固面相连外,其他与测定活塞组件完全相同。两个组件内的液体在相同的条件下由于热胀冷缩会造成第1和第2玻璃管内液面高度发生相同的改变(设第2玻璃管内液面高度为H2),很大程度上制约了因温度而引起的误差。由于固定量液体的压缩/拉伸体积不变性,第1盛液器内液体体积改变量(设第1盛液器内径为R)等于第1玻璃管内液体的体积改变量(设第1玻璃管内径为r),即πR2ΔHi=πr2(H1-H2);式中:(H1-H2)是修正温度影响造成的第1玻璃管内液体高度实际变化量,所以活塞实际的位移量(即为锚固面在受力方向上的位移)为
(1)
2 图像处理液面高度
为实现系统化长时间在线监测,必须将玻璃管内液面高度变化转为智能化读取,本系统采取图像处理的方式记录玻璃管内液面高度的变化,具体原理如图3。
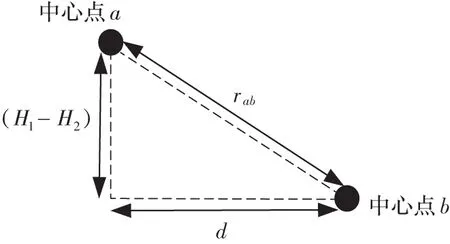
图3 中心点定位及距离计算Fig.3 Center point positioning and distance calculation
图3中:a表示测定活塞组件中的悬浮球;b表示基准活塞组件中的悬浮球;d为两组活塞组件中玻璃管中心轴之间的平行距离。
2.1 两斑点像素距离计算
要计算出两个斑点之间的距离rab,需要知道每个斑点的坐标。首先对斑点进行滤波处理,消除噪声干扰;由于抓拍的是悬浮球,所以斑点的成型会很规则,只需将两个斑点分割再各自找出中心点即可;笔者采用类似区域生长的方法将两个斑点分割,在待处理的二值化图像中找到第1个八领域非零像素点,标记为种子点,并以此为中心,往4个方向寻找此种子点的边缘,以此确定第1个斑点区域;用二值化后图像减去搜索出的第1个斑点,剩下的即为第2个斑点。找出两个斑点后,分别采用圆拟合法计算出两个斑点的中心坐标。假设采集到的图像大小为X×Y像素,E是斑点a的边界点集合。对于斑点a,i∈E,(xi,yi)为光斑边界像素的坐标,x,y满足
(2)
斑点a中心点的坐标(a1,a2)
(3)
(4)
斑点b中心点的坐标(b1,b2)用同样的拟合公式得到,最后再求出两个中心点的欧式距离,即为图像采集仪所捕捉到的两个悬浮球中心点的像素距离。
(5)
2.2 参数标定以及位移换算
上述求得的rab是根据图像像素点间欧式距离得来的,实际距离要根据所采用的图像采集仪的分辨率来换算。例如图像采集仪分辨率为1 920×1 080像素,假设图像采集仪在y轴的最大采集范围为300 mm,且不考虑镜头畸变,那么此图像采集仪在y轴上的比例系数为k=300/1 920=0.156 25 mm/pixel;同样可以知道图像采集仪在x轴的比例系数,由于图像采集仪和第1玻璃管始终保持垂直的角度,其所采集的斑点始终在一个二维平面上移动,所以通过比例系数就可以把像素距离rab换算成实际距离。
3 测量系统误差分析及应对措施
测量系统在选材和安装过程中,都会出现相应的误差,有些误差对于测量系统来说是致命的,因此分析误差产生的原因以及找到减小误差的方法对于提高测量系统精度来说至关重要。
3.1 图像测量系统镜头畸变误差分析及解决措施
3.1.1 误差分析
实验中所用的CCD摄像头往往通过市场购买。这类镜头在成像过程中一般都存在一定程度的非线性光学畸变,会造成图像的形状和大小发生某些变化,导致图像失真,给后面的图像分析和图像测量带来了误差,甚至造成误判。因此必须对摄像机镜头所造成的图像几何畸变畸形校正。
3.1.2 解决措施

湿地生态旅游是一种新的旅游方式,需要高素质的管理人才和服务人才,不但要为游客提供良好的服务,还要负责对游客的湿地教育。湿地生态旅游要强化宣传,充分利用各种宣传媒体,展示湿地的生态风貌,介绍湿地旅游产品的独特性,以此来塑造本地的开发形象,提高知名度。
3.2 非垂直安装误差分析及解决措施
3.2.1 误差分析
测量系统如若未垂直安装会对测量结果造成严重的误差。图4中,A和B是垂直平面成像点,对应A1和B1为中心定位后的像素点;a和b是倾斜平面成像点,对应a1和b1为中心定位后的像素点,θ是倾斜的角度。从像素平面可以看出随着θ的增大,中心定位后的像素点距离误差会越来越大,从而严重影响测量精度。
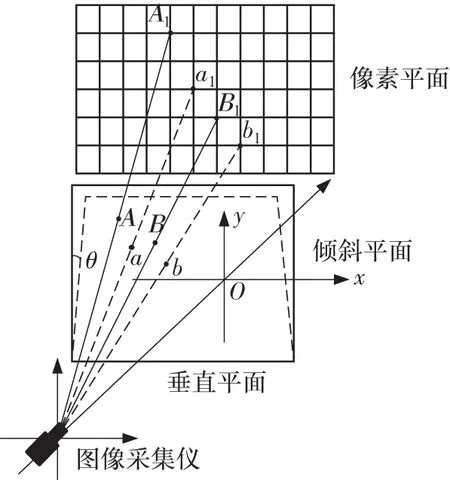
图4 非垂直安装误差分析Fig.4 Non vertical installation error analysis
3.2.2 解决措施
为了纠正非垂直安装误差,建立如图5的坐标系,原像素平面α上有一点A1(x0,y0),且α旋转角度θ形成平面β,此时该点在成像平面的投影点为a1(x1,y1),像素平面宽度为w,长度为H。笔者通过一种类比的方式来计算x1和x0的关系[14],由于当x1离x轴中线越近时x0也随之逼近,由此推导出x1,x0,θ存在以下关系:

图5 原平面与倾斜平面x轴方向校正Fig.5 Correction of the x axis of the original plane and inclined plane
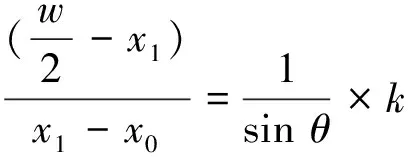
(6)
式中:k=(H-y0)/H,整理后得
(7)
y轴方向校正如图6,由于点A1(x0,y0)投影形成点a1(x1,y1),根据三角函数公式推理可得
(8)
由此可得
(9)
由式(9)可知,通过倾斜后的像素点以及旋转角度θ可以获得原像素点,再通过计算程序对每次测量点的值进行误差纠正,从而可以减小非垂直安装误差。
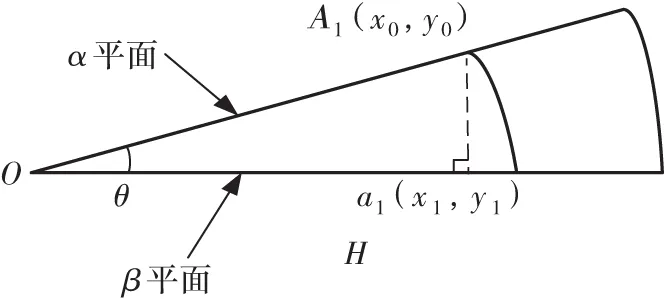
图6 原平面与倾斜平面y轴方向校正Fig.6 Correction of the y axis of the original plane and inclined plane
4 测量系统实验验证
本实验采用模拟锚室环境来验证系统可行性,测量装置如图7。两组特制的活塞装置平行固定于可精确移动的锚固面上,且玻璃管间的平行轴距d=153 mm,玻璃管内径比值r2/R2=0.04。实验采用分辨率为1 920×1 080像素的图像采集仪,并固定于差值放大装置正上方。使用高精度螺旋测微仪对锚固面进行移动,以原始点作为原点分别以间隔3 mm向前推或者向后拉,反复验证以确保系统可行。实验结果如表1。
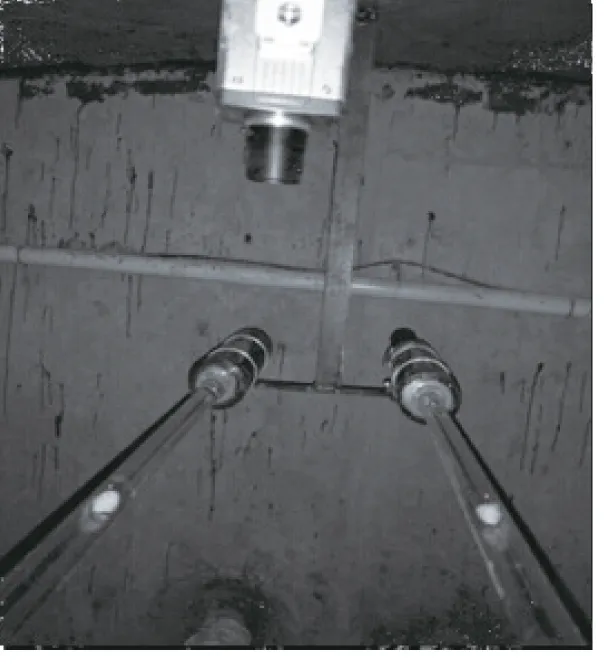
图7 测量装置实物Fig.7 Measuring device object graph
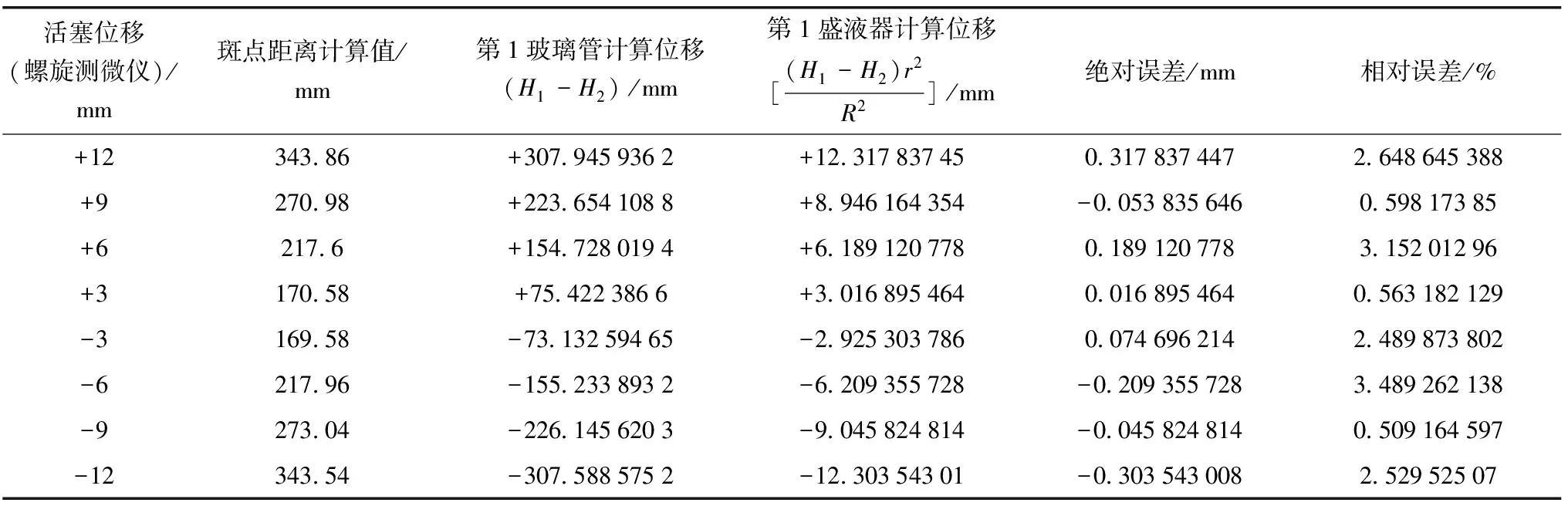
活塞位移(螺旋测微仪)/mm斑点距离计算值/mm第1玻璃管计算位移(H1-H2)/mm第1盛液器计算位移[(H1-H2)r2R2]/mm绝对误差/mm相对误差/%+1234386+3079459362+123178374503178374472648645388+927098+2236541088+8946164354-0053835646059817385+62176+1547280194+61891207780189120778315201296+317058+754223866+301689546400168954640563182129-316958-7313259465-292530378600746962142489873802-621796-1552338932-6209355728-02093557283489262138-927304-2261456203-9045824814-00458248140509164597-1234354-3075885752-1230354301-0303543008252952507
从表1可以看出:此系统可以真实反映锚固面在受力方向上的位移情况,显示锚固面每隔3 mm设定值与测量值的偏差情况,从中可以看出实验验证结果与设定值基本保持一致,从而保证了系统的准确性。
客观的反映出测量系统的误差存在,实验系统的最大绝对误差和最大相对误差分别为0.317 8 mm和3.489 3%。试验中由于引入了镜头畸变误差和非垂直安装误差,由此减小了误差的产生,如果再进一步提高测量系统的设备精度,系统的误差将会随之减小。
5 结 语
提出一种基于活塞装置的位移差值放大法来监测锚固面位移的测量系统。通过相应装置的设计,搭建实验平台,使用图像处理方式智能化读取信息,获得了有效的测量数据,验证了系统的可行性,并通过实验数据进行有效分析。由于文章篇幅有限,没有系统的阐述图像处理过程,只对设计流程和方法做了相应的陈述,在以后的使用过程中将会对此测量方法进行深入探讨、改进,对大规模使用的可行性进行研究。
[1] 张净霞,李阳赋.浅谈国内外悬索桥的发展[J].福建建材,2014(12):19-20. ZHANG Jingxia, LI Yangfu. The suspension bridges at home and abroad the development[J].FujianBuildingMaterials, 2014(12):19-20.
[2] 蓝章礼,兰天凤,鲁云平.基于弹性形变的拉索索力测量系统[J].传感器与微系统,2015,34(1):88-90. LAN Zhangli, LAN Tianfeng, LU Yunping. Cable force measurement system based on elastic deformation[J].TramsducerandMicrosystemTechmologies, 2015,34(1):88-90.
[3] 蒋洪涛,张岩.光纤传感器在桥梁健康监测中的应用[J].北方交通,2006(10):56-59. JIANG Hongtao, ZHANG Yan. Application of fiber-optic sensor in bridge health monitoring[J].NorthernCommunications, 2006(10):56-59.
[4] 刘德煜. GPS与微波干涉测量在桥梁动挠度测量中的对比分析[J].桥梁建设,2009(3):81-84. LIU Deyu. Comparative analysis of GPS measurement and microware interference measurement applied to measurement of bridge dynamic deflection[J].BridgeConstruction, 2009 (3):81-84.
[5] 伍贤智.新型光纤光栅倾角传感器设计及其桥梁挠度测试[D].长沙:中南大学,2009:34-52. WU Xianzhi.NewTypeofFiberBraggGratingAngleSensorDesignandtheBridgeDeflectionTesting[D]. Changsa: Central South University, 2009:34-52.
[6] 张雷潭.浅析GPS定位技术在变形监测中的应用[J].内蒙古科技与经济,2010(4):110-111. ZHANG Leitan. Analyis the application of GPS technology in the deformation monitoring[J].InnerMongoliaScienceTechnology&Economy, 2010 (4):110-111.
[7] 王峰波. GPS在桥梁健康监测系统中位移及挠度的监测[D].西安:长安大学,2006:23-50. WANG Fengbo.GPSinBridgeHealthMonitoringSystemDisplacementandDeflectionMonitoring[D]. Xi’an: Chang’an University, 2006:23-50.
[8] 李海东.基于GPRS的大跨度桥梁连通管式激光挠度测量系统开发[D].重庆:重庆交通大学,2008:13-45. LI Haidong.TheDevelopmentoftheCommunicatingPipeLaserDeflectionMeasurementSysteminLongSpanBridgeBasedonGPRS[D].Chongqing: Chongqing Jiaotong University, 2008:13-45.
[9] 刘国平.连通管式桥梁挠度监测系统的低频动态特性研究[D].重庆:重庆大学,2007:27-58. LIU Guoping.CommunicatingPipeTypeLow-frequencyDynamicCharacteristicsofBridgeDeflectionMonitoringSystemResearch[D]. Chongqing: Chongqing University, 2007:27-58.
[10] 周建庭,蓝章礼,张洪.利用激光进行锚碇结构位移监测的方法:CN102889858A[P].2013-01-23. 是否分节? & filename=CN102889858A & urlid= & yx=. ZHOU Jianting, LAN Zhangli, ZHANG Hong.TheMethodofUsingLaserDisplacementofAnchorageStructureMonitoring: CN10288 9858A[P]. 2013-01-23.
[11] 蓝章礼,张洪,周建庭.利用压力差进行锚锭结构位移监测的方法:CN102864794A[P].2013-01-09. 是否分节? & filename=CN102864794A & urlid= & yx=. LAN Zhangli, ZHANG Hong, ZHOU Jianting.TheUseofPressureDifferenceforAnchorageStructureofDisplacementMonitoringMethods:CN102864794A[P].2013-01-09.
[12] 汪海滨.悬索桥隧道式复合锚碇系统作用机理研究[D].成都:西南交通大学,2006:1-50. WANG Haibin.MechanismResearchonCompoundTunnelAnchorageofSuspensionBridge[D]. Chengdu: Southwest Jiaotong University, 2006:1-50.
[13] 商耿.悬索桥锚固区蠕动仿真与安全性评估研究[D].重庆:重庆交通大学,2012:21-48. SHANG Geng.TheStudyofPeristalticSimulationandSafetyEvaluationinAnchorageofSuspensionBridge[D]. Chongqing: Chongqing Jiaotong University, 2012:21-48.
[14] 林治贤,王伟智.空间平面倾斜失真的图像复原方法[J].福建电脑,2010(7):5-6. LIN Zhixian, WANG Weizhi. Image restoration method for spatial plane skew distortion[J].FujianComputer, 2010(7):5-6.
(责任编辑 朱汉容)
Anchoring Surface Displacement Monitoring System Based on Differential Amplification Method
LAN Zhangli1,TIAN Yuan1,ZHOU Jianting2,YAO Jinqiang1
(1. School of Information Science & Engineering, Chongqing Jiaotong University, Chongqing 400074,P.R.China;2.School of Civil Engineering, Chongqing Jiaotong University, Chongqing 400074,P.R.China)
A measurement system based on the piston device displacement differential amplification method is put forward for monitoring the displacement of anchorage surface through research on the characteristics of anchorage plane of the suspension bridge, design of a differential amplifier device in combination with image processing technology. The composition and measurement principle of the system were introduced, and the creep data of the anchor surface was obtained by the image segmentation and the circle fitting method and the displacement transformation. About the measuring system, lens distortion error and non vertical installation errors were analyzed and the solutions were expounded. The experimental results show that when the creep range of -1.2 cm~+1.2 cm, the measurement error can be controlled within 3.5%.
bridge engineering; suspension bridge; anchoring surface; displacement; measuring system; differential amplification
10.3969/j.issn.1674-0696.2017.01.02
2015-12-06;
2016-01-21
重庆市国土资源和房屋管理局科技计划资助项目(CQGT-KJ-2014029)
蓝章礼(1973—),男,重庆人,教授,博士,主要从事桥梁健康监测、数字图像处理等方面的研究。E-mail:Lanzhangli@126.com。
U446.3
A
1674-0696(2017)01-009-05
猜你喜欢
新作文·小学低年级版(2022年3期)2022-08-30
智慧少年·故事叮当(2021年5期)2021-08-23
高师理科学刊(2020年2期)2020-11-26
物理教师(2019年7期)2019-09-23
制造技术与机床(2019年1期)2019-01-14
今日农业(2019年15期)2019-01-03
中成药(2017年6期)2017-06-13
语文世界(小学版)(2015年2期)2015-04-07
小星星·阅读100分(高年级)(2014年10期)2014-10-29
安徽工业大学学报(自然科学版)(2014年4期)2014-07-11
