基于运动副变胞实现的变胞机构构型综合*
2017-02-01 01:54刘江南张文博
华南理工大学学报(自然科学版) 2017年9期
刘江南 张文博
(湖南大学 汽车车身先进设计制造国家重点实验室,湖南 长沙 410082)
变胞机构是一种典型的可变拓扑结构机构,与传统机构不同,变胞机构在连续运动过程中存在多个稳态和变胞态,其构型综合是变胞机构结构学的难点.自Dai等[1]首次提出其概念以来,变胞机构就受到国内外学者的广泛关注.李端玲等[2]通过分析变胞机构的构态转换规律,提出了一种基于构态邻接矩阵运算的机构综合方法.王德伦等[3]通过定义变胞源矩阵、工作状态矩阵和变胞矩阵,并分析其求解过程,将变胞机构的结构综合转化为对此3类矩阵的构造和求解.Zhang等[4- 6]建立了基于基因建模理论的变胞机构构型综合理论,并将其用于将各子构态机构聚合形成变胞源机构.Li等[7- 9]提出了基于扩展Assur杆组的变胞机构的结构组成原理和结构综合方法,又引入了变胞机构的等效阻力梯度模型,分析变胞运动副的约束特点与结构形式,并将两者结合,得到一种基于工作任务的变胞机构结构综合方法.杨强等[10]应用等效阻力梯度模型研究了约束变胞运动副的约束形式、约束变化基本规律以及以变胞源机构为基础设计变胞机构的结构综合方法.Zhang等[11]从折纸中衍生出了一种变胞运动副,具有变轴线方位和变自由度的特点,并将此变胞运动副应用于变胞并联机构的综合设计.张武翔等[12]运用形态学矩阵法对各工作构态机构进行构型综合设计,得出不同的变胞源机构方案,再通过设计相应的变胞运动副,得到变胞机构构型.上述研究表明,变胞机构的构型综合主要包含了构造变胞源机构、综合变胞机构构型两个过程.但目前的相关研究多集中在分析变胞运动副约束形式以及构造变胞源机构等方面,对于如何有效设计变胞运动副结构、综合变胞机构构型尚需进一步研究.文中从分析运动副变胞的约束变化特征出发,通过探究变胞运动副的结构实现形式,提出一种新的变胞机构构型设计方法.
1 变胞运动副约束变化特征描述
变胞机构可以改变拓扑结构,使机构构态发生变化,通过不同稳定构态之间的转换实现不同的机械运动.变胞运动副是指在机构构态转换过程中其约束状态发生变化的运动副.由于变胞运动副的约束状态在机构构态转化过程中发生变化,其约束特征为非定常约束.运动副在某一时刻的约束特征采用运动副约束函数C(t)[13]进行表达:
C(t)=(c1,c2,c3,c4,c5,c6)T
(1)
(2)
式中,c1、c2、c3为运动副各坐标轴线方向的移动约束,c4、c5、c6为运动副各坐标轴线方向的转动约束,pk为运动副相应轴线方向的驱动力或力矩,pkmax为运动副相应轴线方向的最大约束力或力矩.
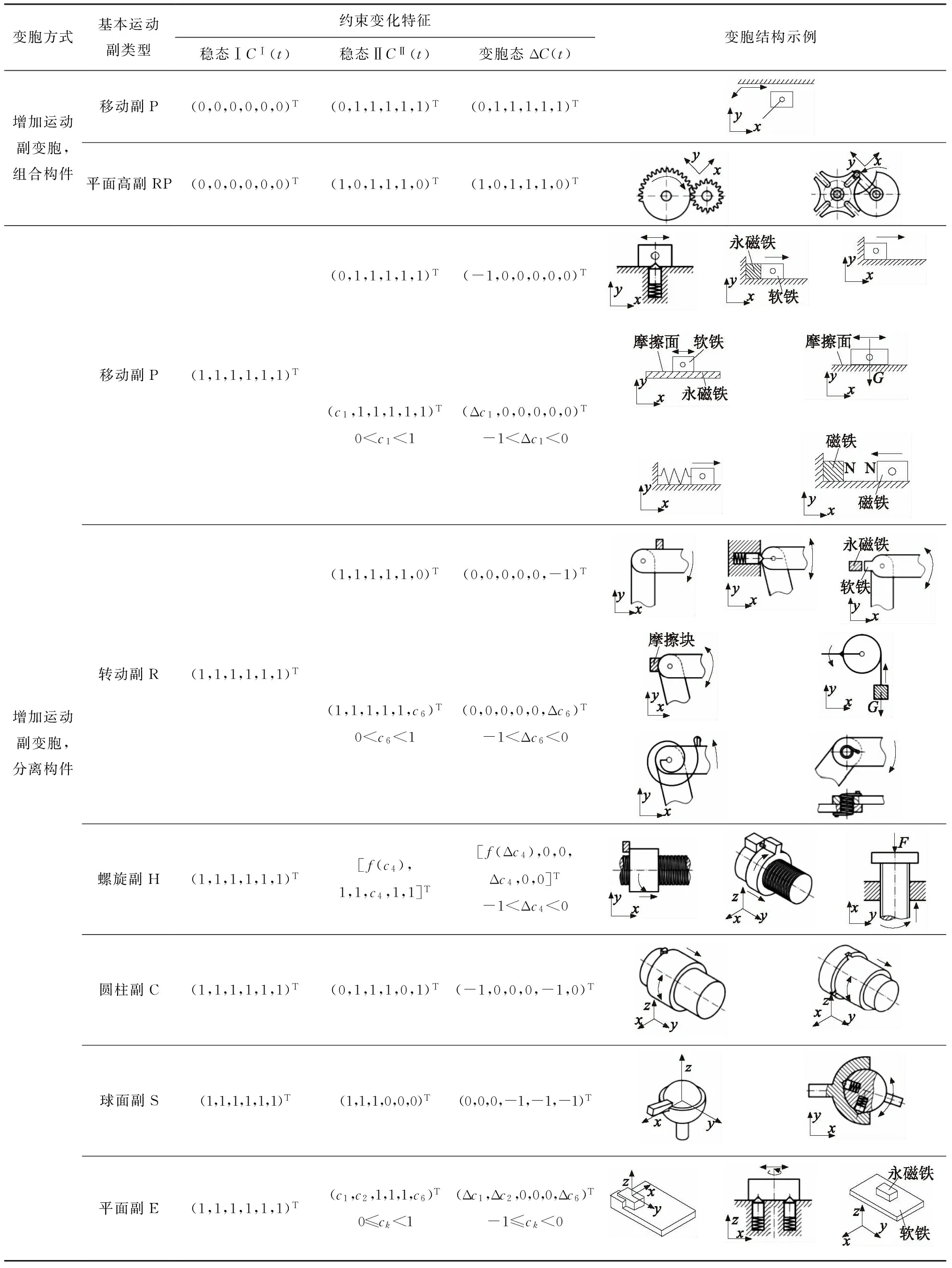
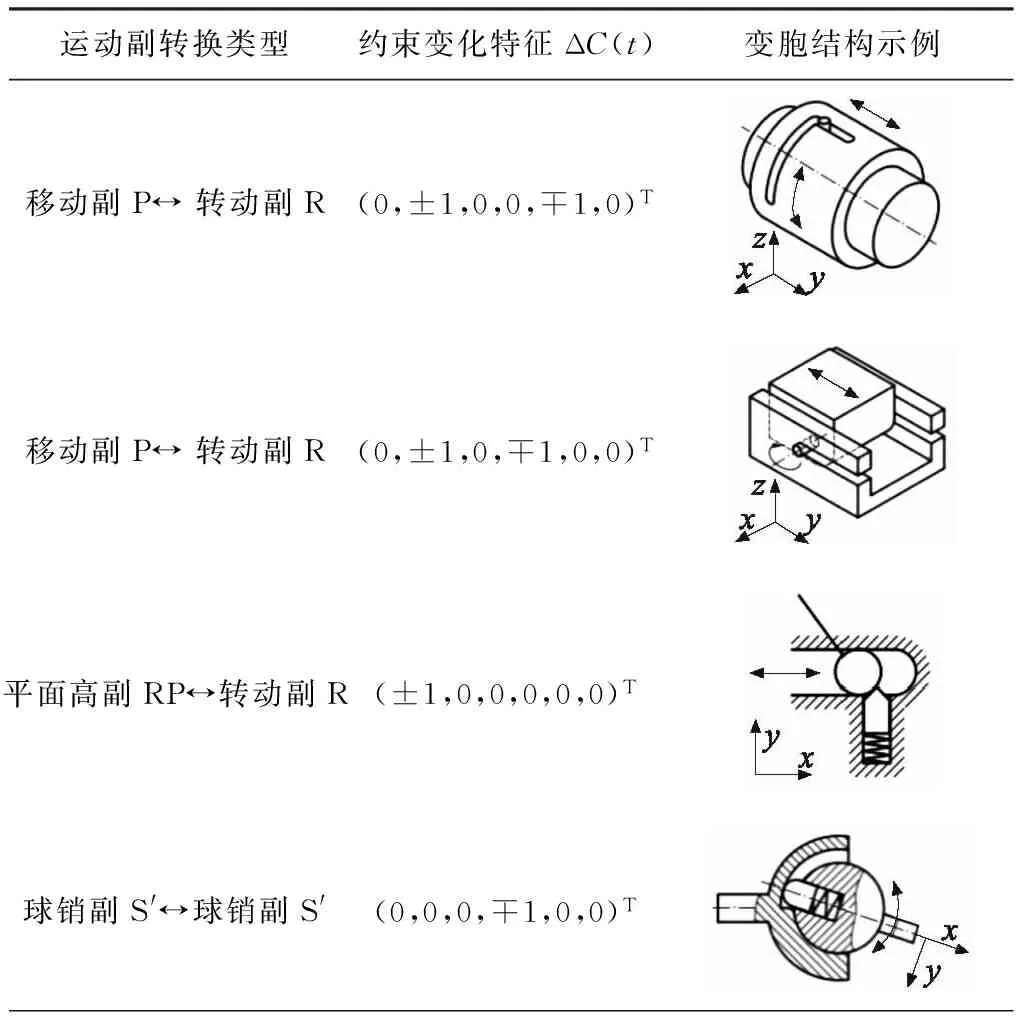
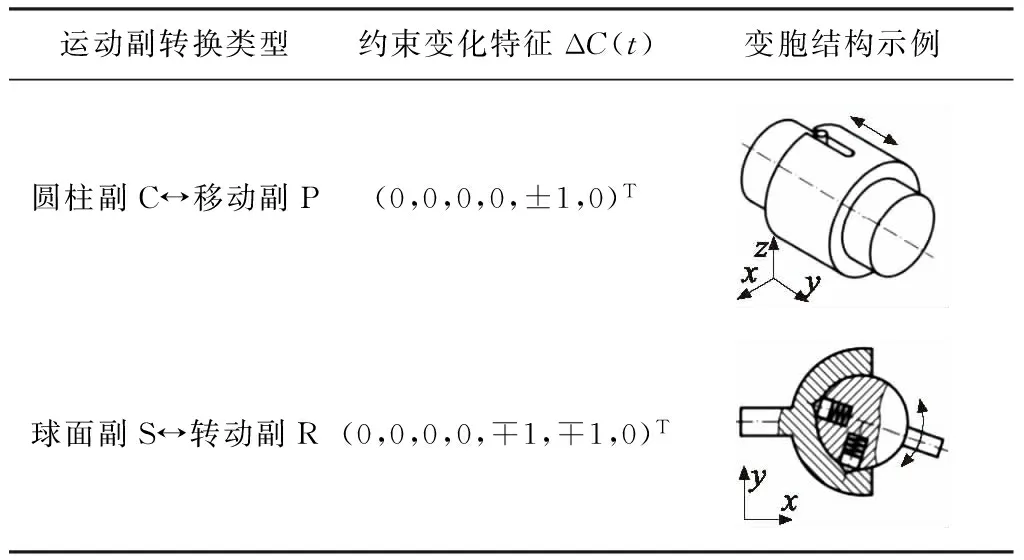
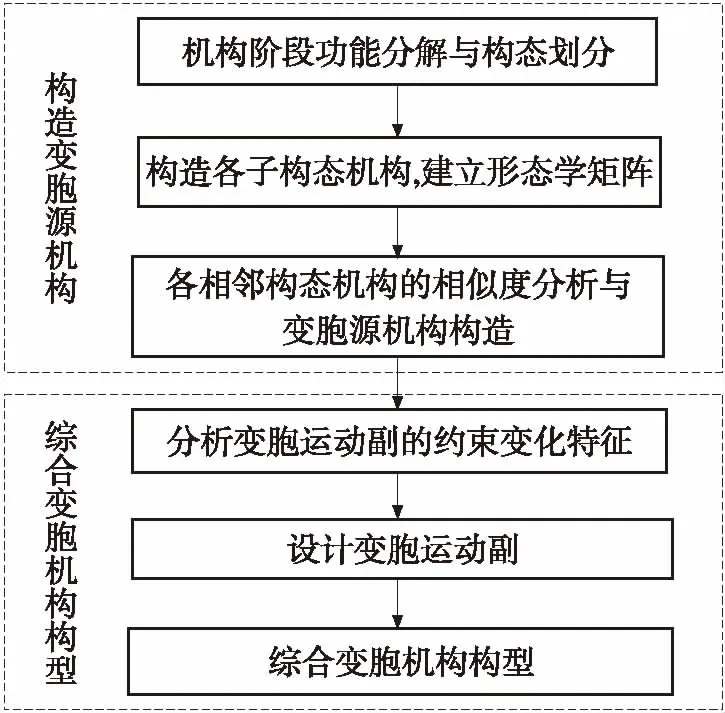
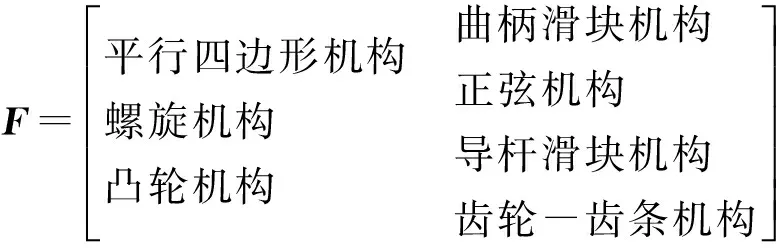
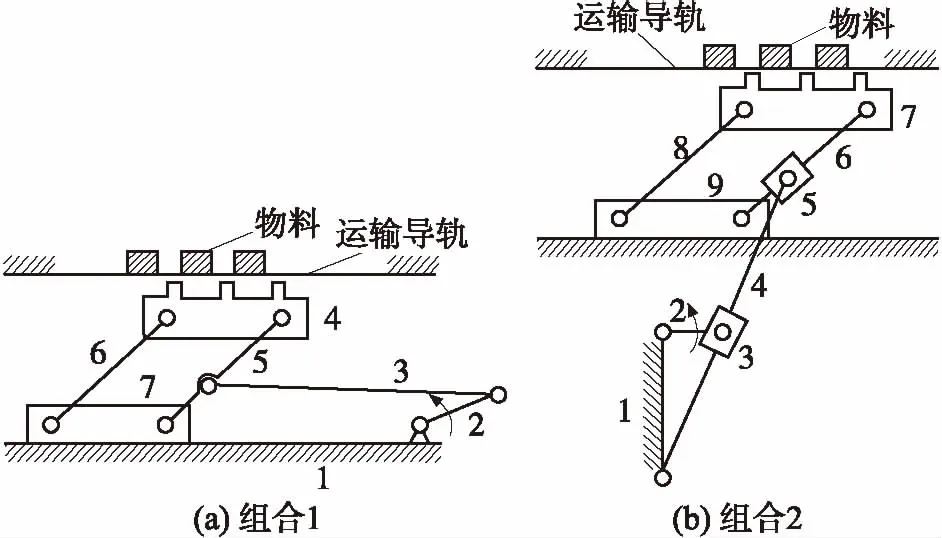
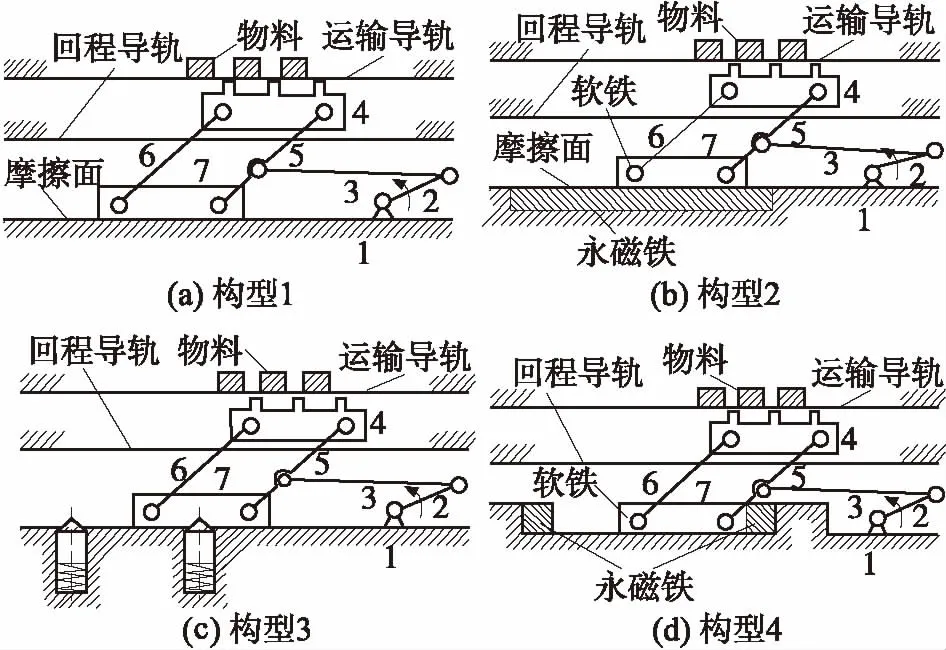
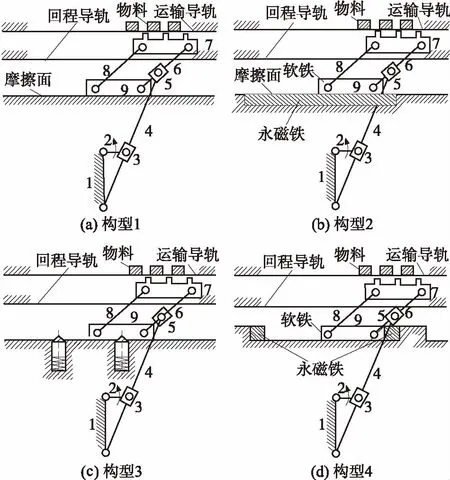
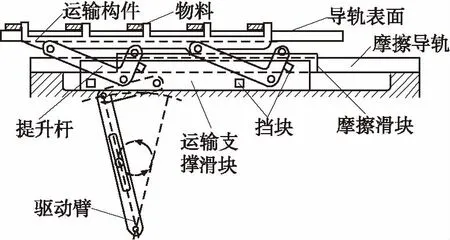
当ck=0(k=1,2,…,6)时,运动副在k方向上无约束;当ck=1时,该方向上的约束为完全刚性约束;当0 变胞运动副各方向上的约束变化特征通过以下数学运算进行描述: ΔC(t)=CⅡ(t)-CⅠ(t)= (Δc1,Δc2,Δc3,Δc4,Δc5,Δc6)T (3) 式中,上标Ⅰ和Ⅱ均为稳态编号. 当Δck>0时,变胞运动副在k方向上增加了约束;当Δck<0时,变胞运动副在k方向上减少了约束. 运动副变胞的本质表现为组成构件之间相互接触关系的变化,并体现在运动副约束特征的变化上.变胞运动副实现约束特征变化的基本结构形式主要有几何结构约束和阻力约束(如弹簧力、摩擦力、电磁力等),其变胞方式主要包括:消除运动副变胞、增加运动副变胞以及改变运动副类型变胞.以不同的方式进行变胞,变胞运动副具有不同的约束变化特征,需要采取相应的结构形式来实现变胞. 本节分别针对上述3类变胞方式分析运动副在变胞过程中的约束变化特征,同时分析、归纳文献[14- 17]和工程实际中具有变胞功能的各类工程案例,设计各类常见运动副的变胞结构形式.基于设计目录[18]的方法,构建变胞运动副结构设计目录. 增加运动副的变胞具有两种形式:组合无连接关系的构件或分离已合并的构件. 由构件组合导致的增加运动副变胞,即在无连接关系的两构件之间增加一定约束,使之相互连接构成运动副,如不完全齿轮机构在进入啮合时的齿轮高副约束变化.运动副的约束变化特征为 ΔC(t)=CⅡ(t)-CⅠ(t)=CⅡ(t) (4) 通过减小已合并的两构件间部分方向上的约束,使之分离形成运动副时,在变胞前,运动副约束函数CⅠ(t)=1.变胞运动副的约束变化特征为 ΔC(t)=CⅡ(t)-1 (5) (6) (7) 若在变胞过程中,变胞运动副在k方向上的驱动力和最大约束力同时发生变化,如克服弹簧阻力作用变胞,则该方向上的约束变化特征 (8) 在进行变胞运动副结构设计时,可通过求解运动副在机构构态转换过程中所需要的约束变化特征,设计对应的约束结构,实现其变胞功能. 基于上述分析方法,对常见运动副(如移动副、平面高副、转动副等)的增加运动副变胞过程进行分析.在分析、归纳相关文献和工程实际中具有变胞功能的各类应用机构结构的基础上,针对各类运动副相应的约束变化特征,设计对应的变胞结构形式,构建运动副的结构设计目录,得到表1所示常见运动副的增加运动副变胞过程与结构设计目录. 表1 常见运动副的增加运动副变胞过程与结构设计目录1)Table 1 Adding joint process and structure design catalogue of common joints 1)G—重力;F—压力;N—磁铁N极;下同. 消除运动副变胞过程相当于增加运动副变胞的逆过程,其约束变化特征分析方法与2.1节所述相同.但在设计运动副结构时,相应的约束力方向或构件运动方向应与之相反,可根据表1所示的运动副结构设计目录设计相应的运动副变胞结构. 改变运动副类型变胞是指改变运动副的一个或几个约束分量,使运动副类型发生改变,且变胞前后机构构件数与运动副数都保持不变.改变运动副类型变胞具有3种形式:增加运动副部分方向上的约束,但组成构件不形成刚性连接(如圆柱副转化为移动副);减少运动副部分方向上的约束,但不导致组成构件完全分离(如移动副转化为圆柱副);在运动副部分方向上增加约束,同时在其他一个或几个方向上减少约束(如将移动副转换为转动副). 在改变运动副类型变胞的过程中,运动副的约束变化特征可直接由式(3)求得,其中各分量的值则采用式(6)-(8)进行计算.采用与第2.1节相同的方法对常见运动副的改变类型变胞过程(如移动副转换为转动副、移动副转换为圆柱副等)进行分析,针对运动副的约束变化特征,设计变胞结构形式,构建相应的运动副结构设计目录,得到表2所示的常见运动副的改变类型变胞过程与结构设计目录. 表2 常见运动副的改变类型变胞过程与结构设计目录1) Table 2 Changing joint type process and structure design catalogue of common joints 运动副转换类型约束变化特征ΔC(t)变胞结构示例移动副P↔转动副R(0,±1,0,0,∓1,0)T移动副P↔转动副R(0,±1,0,∓1,0,0)T平面高副RP↔转动副R(±1,0,0,0,0,0)T球销副S'↔球销副S'(0,0,0,∓1,0,0)T 续表2 1)变拓扑方式:改变运动副类型. 由以上分析可知,根据变胞运动副的约束变化特征,能有效设计其对应的结构形式.基于此,在变胞机构的构型综合过程中,可通过分析变胞运动副在变胞过程中的约束变化特征,并依据相应的运动副结构设计目录,设计含变胞运动副的变拓扑机构. 变胞机构构型综合主要包含两个过程:构造变胞源机构和综合变胞机构构型.文中基于以上变胞运动副的约束变化特征分析,提出一种新的变胞机构构型综合设计方法,其基本步骤如图1所示. 图1 变胞机构构型综合设计基本步骤Fig.1 Basic steps of type synthesis of metamorphic mechanism 变胞机构在不同的工作构态具有不同的拓扑结构,其构型综合应根据工作任务要求,从机构的各阶段功能分解出发,构造各子构态机构,再根据子构态机构构造变胞源机构,然后通过分析变胞运动副在变胞过程中的约束变化特征,设计相应的变胞结构,综合出变胞机构构型.具体如下. (1)机构各阶段功能分解与构态划分 根据机构的工作任务要求,将变胞机构在一个周期内的总功能进行分解,并划分相应的机构构态. (2)各子构态机构的构造及形态学矩阵的建立 分别设计各子构态机构,并采用形态学矩阵F[12],得出全部可能的机构组合. (3)各相邻构态机构的相似度分析与变胞源机构构造 采用相似度分析法[12]对所得的机构组合进行分析,选择相似度较高的组合构造变胞源机构. (4)变胞运动副约束变化特征的分析 首先,根据变拓扑源机构各子构态的运动特性和对应的子构态机构,判断变胞运动副,并以约束函数C(t)描述相应运动副在各构态的约束特征;然后,通过约束函数C(t)的算术运算,分析运动副在变胞过程中的约束变化特征. (5)变胞运动副设计 基于变胞运动副的约束变化特征,查找相应的运动副结构设计目录,选择合理的设计信息;再根据具体的设计要求和机构构态转换顺序,设计变胞运动副结构,得到每一个变胞运动副的结构集合. (6)变胞机构构型综合 分别从步骤(2)所设计的各变胞运动副结构中选取一种结构进行组合,应用于变拓扑机构的构型设计中,即得到全部的变拓扑机构构型. 连杆运输机构[14]是一种在工程上用于运送物料的装置,可实现物料的单向间歇运输.其工作过程为:运输构件通过平动向上抬高,与运输导轨接触后沿导轨平移,将物料往前推送;运输完成后,运输构件先下降到初始高度后再平移返回,以保证物料停在运输导轨上直到下一次循环.文中基于上述变胞机构构型综合方法,对连杆运输机构进行构型设计. ①根据连杆运输机构在一个周期内的工作任务,将其功能分解为运输构件的升降和平移2个基本功能,机构构态对应划分为U1和U22个子构态. ②根据机构在构态U1、U2时的运动要求,分别设计各子构态机构,并建立形态学矩阵 U1U2 (9) ③采用相似度分析法对步骤②中得到的各机构组合进行分析,经筛选得到两个可行的组合方案:组合1——平行四边形机构+曲柄滑块机构;组合2——平行四边形机构+导杆滑块机构.然后,从机构整体设计出发,分别构造两方案的变胞源机构,如图2所示. 图2 连杆运输机构的变胞源机构 Fig.2 Source metamorphic mechanism of linkage for transport mechanism 以组合1变胞源机构来综合连杆运输机构构型. ④根据机构在构态U1、U2时的运动特性和相应子机构结构,可知运输构件4与机架在构态U1时无接触关系,在构态U2时形成移动副P14.构件7与机架在构态U1时处于完全约束状态,在构态U2时转化为移动副P17,两运动副的约束变化特征分别为 ⑤基于步骤①所得的运动副约束变化特征,结合连杆运输机构的构态转换顺序,并根据表1所示运动副结构设计目录对变胞运动副P14、P17进行设计,得到其基本结构集合,如表3所示. 表3 连杆运输机构的变胞运动副基本结构 Table 3 Basic structures of metamorphic joints of linkage for transport mechanism 变胞运动副约束变化特征基本结构P14ΔC14(t)=±(0,1,1,1,1,1)TP17ΔC17(t)=±(Δc1,0,0,0,0,0)T,-1≤Δc1<0 ⑥分别从P14与P17的基本结构集合中选取一种应用于变胞源机构,得到组合1的4种连杆运输机构构型,如图3所示. 图3 组合1的变胞机构构型Fig.3 Metamorphic mechanisms of combination 1 采用同样的方法对组合2对应的变胞源机构进行构型综合,即可得到组合2的4种连杆运输机构构型,如图4所示. 图4 组合2变胞机构构型Fig.4 Metamorphic mechanisms of combination 2 图5为文献[14]提出的一种典型连杆运输机构,与该机构相比,文中得出的两变胞源机构构型具有较少的构件数目,结构更简单.从文中所得变胞机构构型中选取与图5所示机构相似度最大的机构构型(如图4(a)所示)进行运动特性对比. 以该典型连杆运输机构的相对尺寸关系为参 图5 一种典型的连杆运输机构Fig.5 A typical linkage for transport mechanism 照,保证两机构驱动件的尺寸、转速和运输距离均相同,且各传动件尺寸比例相当,采用ADAMS分别进行运动学仿真,并运用Matlab绘制两机构运输构件的水平速度曲线,结果如图6所示. 图6 运输构件水平方向速度曲线对比图Fig.6 Comparison of horizontal velocities of transport links 由图6可知,图4(a)所示机构与图5所示机构相比,在变胞前后运输构件的水平速度突变较小,运动较平稳,运动特性较好. 综上,运用文中提出的变胞机构构型综合方法不仅可以设计出多种变胞机构构型方案,还能对原机构进行改进,减少机构构件数目,简化机构结构,改善机构运动特性. 文中通过约束函数的算术运算描述运动副在变胞过程中的约束变化特征,方便与变胞运动副的结构设计建立对应关系,分析了运动副在增加、消除和改变类型3类变胞过程中的约束变化特征.对应于每一种变胞方式,构建了变胞运动副的结构设计目录;同时,采用形态学矩阵法构造变胞源机构,通过求解变胞运动副约束变化特征,并基于运动副结构设计目录,提出了一种新的变胞机构构型综合方法. 实例表明,基于上述变胞机构构型综合方法不仅能有效综合出多种满足功能需求的变胞机构构型,还能简化机构结构,改善机构性能.但是,文中未能对综合出的机构构型方案进行评估与筛选,针对所得变胞机构构型方案的评价体系还有待进一步研究. [1] DAI Jian-sheng,JONES J Rees.Mobility in metamorphic mechanisms of foldable/erectable kinds [C]//Proceedings of ASME Design Engineering Technical Conference.Atlanta:[s.n.],1998:13- 16. [3] 王德伦,戴建生.变胞机构及其综合的理论基础 [J].机械工程学报,2007,43(8):32- 42. WANG De-lun,DAI Jian-sheng.Metamorphic mechanisms and the synthesis theory [J].Chinese Journal of Mechanical Engineering,2007,43(8):32- 42. [4] ZHANG Li-ping,WANG De-lun,DAI Jian-sheng.Biological modeling and evolution based synthesis of metamorphic mechanisms [J].Journal of Mechanical Design,2008,130(7):1029- 1033. [5] 张利萍,王德伦,戴建生,等.变胞机构的基因建模理论与构态进化分析 [J].机械工程学报,2008,44(12):49- 56. ZHANG Li-ping,WANG De-lun,DAI Jian-sheng,et al.Fundamental of metamorphic-mechanism biological mo-deling and analysis of configuration evolution [J].Chinese Journal of Mechanical Engineering,2008,44(12):49- 56. [6] 张利萍,王德伦,戴建生.变胞机构的基因进化综合理论 [J].机械工程学报,2009,45(2):106- 113. ZHANG Li-ping,WANG De-lun,DAI Jian-sheng.Genetic evolution principles for metamorphic mechanism design [J].Journal of Mechanical Engineering,2009,45(2):106- 113. [7] LI Shu-jun,DAI Jian-sheng.Structure synthesis of single-driven metamorphic mechanisms based on the augmented Assur groups [J].Journal of Mechanisms & Robotics,2012,4(3):385- 390. [8] 李树军,王洪光,戴建生.变胞机构的等效阻力梯度模型及其设计方法 [J].机械工程学报,2014,50(1):18- 23. LI Shu-jun,WANG Hong-guang,DAI Jian-sheng.The equivalent resistance gradient model of metamorphic mechanisms and the design method [J].Journal of Mechanical Engineering,2014,50(1):18- 23. [9] LI Shu-jun,WANG Hong-guang.Task-based structure synthesis of source metamorphic mechanisms and constrained forms of metamorphic joints [J].Mechanism & Machine Theory,2016,96:334- 345. [10] 杨强,王洪光,李树军,等.含变胞运动副结构的约束变胞机构构型综合 [J].机械工程学报,2014,50(13):1- 8. YANG Qiang,WANG Hong-guang,LI Shu-jun,et al.Type synthesis of constrained metamorphic mechanisms with structural forms of metamorphic joints [J].Journal of Mechanical Engineering,2014,50(13):1- 8. [11] ZHANG Ke-tao,DAI Jian-sheng,FANG Yue-fa.Geome-tric constraint and mobility variation of two 3SvPSv metamorphic parallel mechanisms [J].Journal of Mechanical Design,2013,135(1):184- 194. [12] 张武翔,丁希仑,戴建生.基于约束变化特征分析的变胞机构构型综合方法 [J].机械工程学报,2013,49(5):1- 9. ZHANG Wu-xiang,DING Xi-lun,DAI Jian-sheng.Me-thod for configuration synthesis of metamorphic mechanisms based on constraint variation [J].Journal of Mechanical Engineering,2013,49(5):1- 9. [13] 刘江南,于德介.基于约束函数的变胞机构变胞方程[J].机械工程学报,2012,48(9):1- 9. LIU Jiang-nan,YU De-jie.Metamorphic equation of variable topology mechanisms based on the constraint function [J].Journal of Mechanical Engineering,2012,48(9):1- 9. [14] NEIL Sclater.Mechanisms and mechanical devices sourcebook [M].New York:McGraw-Hill Professional,2011. [15] 潘承怡,向敬忠.机械结构设计技巧与禁忌 [M].北京:化学工业出版社,2013. [16] 符炜.机械创新设计构思方法 [M].长沙:湖南科学技术出版社,2006. [17] 邹慧君,颜鸿森.机械创新设计理论与方法 [M].北京:高等教育出版社,2008. [18] ROTH K.Design catalogues and their usage [M].Engineering Design Synthesis.London:Springer,2002:121- 129.2 运动副变胞方式分析与结构设计
2.1 增加运动副变胞
2.2 消除运动副变胞
2.3 改变运动副类型变胞
3 变胞机构构型综合方法
4 示例


5 结语

猜你喜欢
军民两用技术与产品(2022年1期)2022-06-01
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08
数学年刊A辑(中文版)(2020年1期)2020-05-19
北京航空航天大学学报(2017年10期)2017-04-20
股市动态分析(2016年23期)2016-12-27
股市动态分析(2016年7期)2016-09-29
股市动态分析(2016年4期)2016-09-29
股市动态分析(2016年29期)2016-08-04
人生十六七(2015年6期)2015-02-28
航天返回与遥感(2014年4期)2014-07-31