
基于Boost电路的预测PI控制
2017-01-19 06:30任正云
网络安全与数据管理 2017年1期
程 功,任正云
(东华大学 信息科学与技术学院,上海 201620)
基于Boost电路的预测PI控制
程 功,任正云
(东华大学 信息科学与技术学院,上海 201620)
非最小相位是指具有右半平面零、极点或滞后的线性对象,在DC-DC变换器中,Boost变换器以电容电压作为输出量进行反馈控制时,是一个非最小相位系统。由于目前大多数Boost电路的控制方法选用的是传统PID控制,这种方法具有结构简单、可靠性高等特点,但是系统的动态特性、抗干扰性能却有待进一步提高。由于预测PI控制算法具有抗滞后和抗非最小相位特性的能力,将其应用到Boost电路中进行理论研究并进行实时仿真。仿真结果表明,预测PI控制算法具有良好的动态特性且抗干扰性强,能够体现良好的控制效果。
非最小相位;预测PI控制算法;Boost电路
0 引言
由于电力电子技术发展迅速,带动了新能源技术的发展,同时使功率电源得到广泛运用。现在电力电子技术常用的是开关电源技术,其核心是DC-DC变换器。由于DC-DC变换器具有非线性特点,使其难以建立准确的模型。对于DC-DC变换器,传统的建模方法是建立小信号模型。而实际中的过程对象大都具有非线性、时变特征,若采用传统PID控制DC-DC变换器,则会存在输出电压不稳、精度低、可调范围小、纹波电流过大等问题[1]。
本文主要研究了Boost升压电路在预测PI控制算法和传统PID控制下的动态响应特性。由于Boost升压电路是典型的DC-DC功率变换器,因而是一个非最小相位系统,表现为小信号数学模型中存在右半平面的一个零点,这个零点的一个显著特征就是在占空比突变的情况下,除发生超调外,输出电压的开始阶段会出现先下降后上升的变化,即出现负调现象。这种负调现象会恶化控制系统的动态品质,导致系统的过渡时间延长,因此对Boost电路而言抑制负调非常重要[2]。
针对上述Boost升压电路的非线性特征,本文采用预测PI控制算法对Boost升压电路进行控制,使其具有良好的控制效果。实际仿真表明,预测PI控制算法具有很好的动态控制特性和抗干扰性。
1 Boost变换器
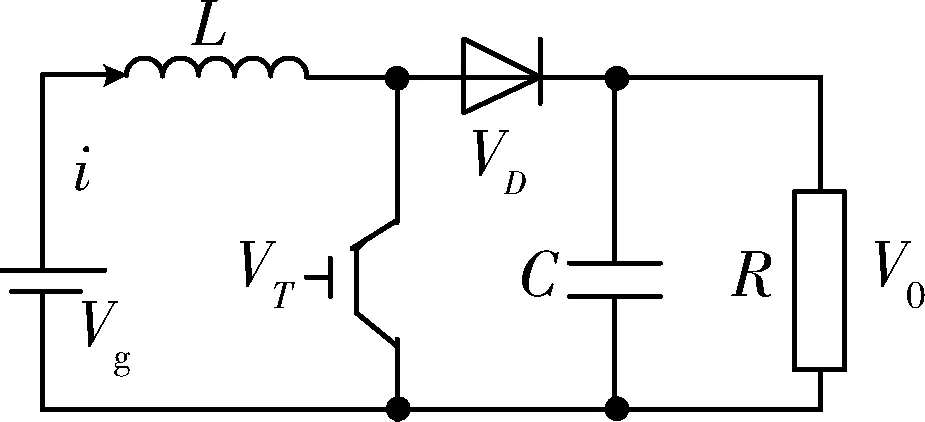
图1 Boost变换器电路结构
Boost升压电路采用闭环回路控制,采用传统PID进行控制,就必需对系统建立一个比较准确的数学模型。而在电力电子技术中,常用的方法是建立小信号模型,然后根据系统的幅频特性对其进行补偿,最后计算得到PID控制器参数。对Boost电路建立小信号模型时,通过忽略开关频率谐波等因素来简化模型,所以在研究某一稳定工作点附近的动态特性时,需要将其近似为线性系统[3]。Boost电路原理图如图1所示。
由小信号模型可以用下式得占空比D:
(1)
滤波电感的选择与负载电流的变化及希望的工作状态有关,这里假设电路要求工作在电感电流连续工作状态,则临界电感为:
(2)
滤波电容的选择直接关系开关稳压电源输出中纹波电压△U的大小。
(3)
由式(1)~(3)推出Boost电路的小信号模型为:
(4)
且
(5)
如果要求电压输入为12 V,电流输出为5 A,电压输出为18 V,开关频率为50 kHz,纹波电压小于0.1 V,则通过式(1)~式(4)并且微调电感、电容参数,分别取电感L=1 mH,电容C=0.000 4 F,可推出在小信号模型下的Boost电路的传递函数模型为:
(6)
其中得出:
kp=3×107,Tp=6.225×10-4
其中kp代表控制过程的开环增益,Tp表示过程的时间常数。由此可推出该传递函数是一个非最小相位系统的传递函数,其开环阶跃响应如下图2所示。

图2 开环阶跃响应
由图2可以得出,曲线在初始时有明显的负调现象。电感L、电容C共同决定系统启动时的超调量和上升时间,而此时的传递函数表明该系统有一个右半平面的零点,这个零点位置会随Boost变换器的电感、电容变化而变化,这种现象会恶化控制系统的动态品质,导致系统的过渡时间变长,而且在负调时间段内,控制器接受到相反的反馈信号,形成正反馈系统,严重影响系统的稳态性能[4]。对此传递函数进行一阶Pade近似,即:
(7)
其中τ为延迟环节,此时如果给式(6)配置式(7),进行一阶Pade近似会使负调现象在仿真中消失,从而拟合成一个消除负调现象的滞后系统,即:
(8)
其中τ=2Tp,从而可得下式:
(9)
从式(9)中可以得出,含有延迟环节的非最小相位系统是含有右半复平面零点非最小相位系统的一种特殊情况[5]。
2 系统辨识拟合
传递函数的辨识时域方法包括阶跃响应法、脉冲响应法等,其中以阶跃响应法最为常用[4-5]。通过对上述图形分析,进一步对其进行系统辨识拟合,采用二阶欠阻尼自衡对象的辨识。对于传递函数:
(10)
式中,w0为自然频率,ξ为阻尼系数,当ξ<1时,称为欠阻尼系数。
在阶跃输入激励下,系统输出会出现震荡现象,采用拉式变换,得出无因次曲线为:
(11)
其中:
令:
由二阶欠阻尼自衡对象的拟合辨识方法得出t1=0.003 7 s和t2=0.01 s时刻的值分别为Y1=38.7 V,Y2=28.5 V。
由公式:
得出所拟合传递函数:
(12)
得到K=27.270,用阶跃响应对其仿真,如图3所示。

图3 开环阶跃响应
接着继续对此传递函数进行一阶惯性对象的传递函数拟合,传递函数拟合一般有两种经典方法:切线法和计算法。下面通过计算法来辨识出需要的传递函数。
根据公式:
(13)
(14)
(15)
取t1=0.004 5 s,y1*=1.432,t2=0.011 s,y2*=1.08,带入式(14)、(15),得到τ=0.001 868 s,T=0.000 324。即一阶惯性滞后的拟合传递函数如下:
(16)
3 预测PI控制算法
传统的PID控制算法在控制器参数整定时比较麻烦,整定参数较多。自1992年Hagglund提出预测PI控制器的思想,预测PID算法得到了逐步的发展和完善,形成了预测算法和PID算法融合在一起的控制器。这种控制器中,包括预测控制器和PID 控制器,PID控制器与过程的滞后时间无关,根据以前的控制作用给出现在的控制作用。这种控制器已经成功应用于实际的工业过程。预测PI控制器由两部分组成:PI部分和预测部分,总共有5个参数,其中3个为可调参数[6-7]。其结构图如图4所示。

图4 预测PI控制结构图
假设控制对象传递函数为:
(17)
假设系统所期望的闭环传递函数如下:
(18)
则控制器的输入输出关系可表示为:
(19)
上式右边第一项具有PI控制器的结构形式,能够提高控制器的稳定性, 在不同干扰存在和模型发生变化时, 都能保持良好的控制性能。第二项可以解释为:控制器在t时刻的输出是基于时间区间[t-τ,t]上的输出预测而得到的[8]。这种控制器称为预测PI控制器(PPI)。引入预测控制项是为了克服纯滞后对控制的不利影响。在预测PI控制器参数选取上,kp一般选为过程增益的倒数,T为过程达到稳态值的时间常数,τ为过程的滞后时间。其中λ是可调参数,当λ=1时,系统的开环与闭环的响应时间常数一致;当λ>1时,系统的闭环响应比开环响应要慢;当λ<1时,系统的闭环响应比开环响应要快[9]。图4中的Gc1(s)和Gc2(s)分别为:
(20)
(21)
E(s)、U(s)分别为控制器的输入和输出。由结构可知预测PI控制算法同时具有PI算法的功能和预测功能,对带有滞后对象的系统能够进行有效控制,而且控制简单,参数调节方便[10-11]。
4 Boost电路的预测PI控制仿真及结果分析
利用预测PI控制算法对Boost电路进行控制,其控制原理如图5所示。

图5 控制原理图
其中G(s)为Boost电路的传递函数,Gp(s)为预测PI控制器,d(s)为扰动项,且由式可知,G(s)传递函数为:
(22)
则可知选取λ=10,kp=27.27,T=0.000 324时,有:
(23)
(24)
基于MATLAB中的Simulink工具包中的仿真工具,模拟构造控制系统,通过对系统的仿真,可以实时观测控制系统的动态特性,并对控制方案进行分析。首先采用传统PID控制方法对Boost电路进行仿真,得到仿真图如图6。
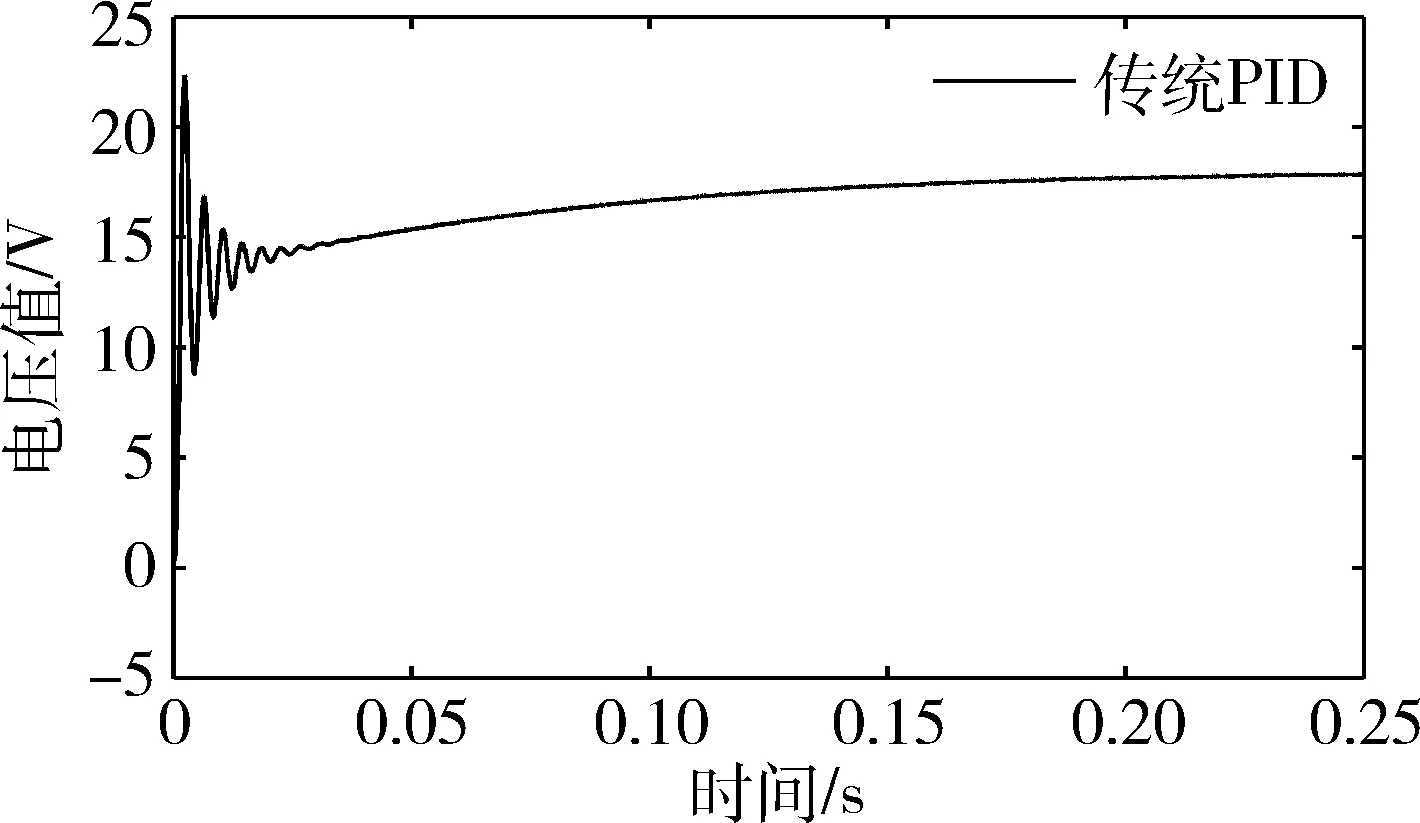
图6 PID仿真波形图
为了检验预测PI控制算法在Boost电路中的性能,将其与传统PID控制算法进行仿真比较。如图7。

图7 仿真对比图
对比可得,预测PI控制算法比传统PID算法在面对非最小相位系统对象时,稳定性和快速性具有良好的效果,同时震荡幅度也比传统PID要优良,并且大幅度缩短了系统响应时间,提高了系统快速性。
当系统达到稳态后,如果随机给稳态系统加上扰动,例如在0.3 s时加上一个扰动项,即加上一个3 V的阶跃信号充当干扰量,以及同样在0.3 s时加另外一个阶跃信号幅值为-3 V的扰动项,观察此时的预测PI控制以及传统PID控制下的Boost电路的波形图。仿真结果如图8、图9所示。

图8 加入3 V扰动时的仿真图
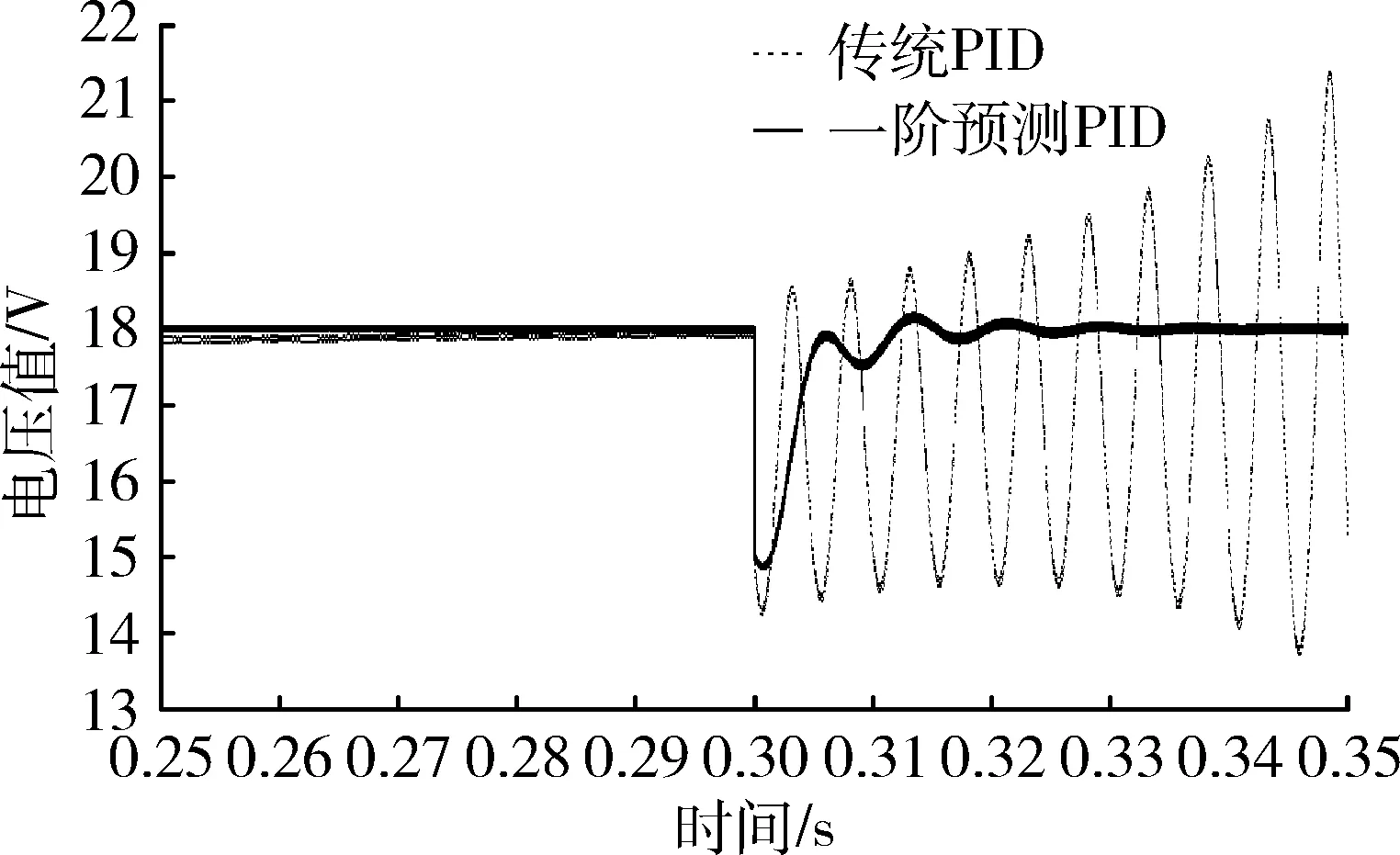
图9 加入-3 V扰动时的仿真图
通过观察上述两图,Boost电路在预测PI控制算法下,能够快速稳定地达到稳态值,同时超调量小,动态响应优越,而传统PID算法下的Boost电路,在加上-3 V的扰动项下,会出现发散,不能够达到稳态,动态响应差,从而证明了基于一阶预测PI的Boost电路的抗干扰性能和鲁棒性比传统PID优越。
5 结论
本文针对DC-DC功率变换器中的典型Boost电路的非最小相位行为,提出了基于预测PI的控制算法,并在理论上进行了研究与分析。仿真结果显示被控系统具有良好的响应曲线,并与传统的PID控制器进行了仿真对比,通过两者的响应曲线,表明了预测PI控制器可以实现高精度、强鲁棒性、快速性的性能,从而避免了传统PID在系统过程中出现的高超调、震荡大、响应慢、稳定性差等缺点,说明了预测PI控制算法比传统PID在性能上增强了系统的抗干扰能力,改善了控制性能,而且在参数整定方法上比较容易获得。因此基于预测PI算法的Boost电路是一种优良的控制方案。而且文中提出的预测PI控制器可以同时用在Buck电路和Buck-Boost电路中,是一种新的实用控制方式。
[1] 王淯舒,孙培德,吕蕾.基于自整定模糊PID控制的Buck变换器设计与仿真[J].自动化与信息工程,2014, 35(5):39-45.
[2] 马增辉,刘长良.一类非最小相位系统的PID控制器整定方法[J].信息与控制,2015,44(2):147-151.
[3] 李鹏波,胡德文,张纪阳.系统辨识[M].北京:中国水利水电出版社,2010.
[4] 皇金锋,刘树林.Boost变换器的参数选择与非最小相位分析[J].电机与控制学报,2014,18(7):51-59.
[5] 徐德鸿.电力电子系统建模及控制[M].北京:机械工业出版社,2005.
[6] 任正云.预测PID控制及其在工业中的应用[D]. 上海:上海交通大学,2003.
[7] SCHEI T S. A method for closed loop automatic tuning of PID controllers[J]. Automatica, 1992, 28(3): 587-591.
[8] RAD A B.Predictive PI controller[J].International Journal of Control,2007,60(5):953-957.
[9] 任正云,邵惠鹤,张立群. 几种特殊动态特性对象的预测PI控制[J].仪器仪表学报,2004,25(5):617-618.
[10] ZHENG D, REN Z Y, FANG J A. Stability analysis of multiple time-delayed system[J].ISA Transactions,2008, 47(3): 439-447.
[11] AIRIKKA P.Stability analysis of a predictive PI controller[C]. Control & Automation (MED), 2013 21st Mediterranean Conference on. IEEE, 2013: 1380-1385.
Predictive PI control based on Boost circuit
Cheng Gong,Ren Zhengyun
(College of Information Science and Technology, Donghua University, Shanghai 201620, China)
Non-minimum phase is a liner object, which has zero and pole in the right half of plane or be delayed. In the DC-DC converters, Boost circuit, which takes capacitor voltage as the output to carry on feedback control, is a non-minimum phase system. Now the controlling method of the Boost circuit is the traditional PID control. This control has a simple structure, high reliability, etc. But dynamic characteristics of the system, anti-jamming performance need to be improved. Because the predictive PI control algorithm has hysteresis resistance and the ability to resist non-minimum phase characteristics, it has incorporated into the Boost circuit to carry on theoretical research and real-time simulation. The results show that the predictive PI control algorithm has good dynamic characteristics and strong anti-interference. It has reflected a good control effect.
non-minimum phase; predictive PI control algorithms; Boost circuit
TM919;TP271
A
10.19358/j.issn.1674- 7720.2017.01.002
程功,任正云. 基于Boost电路的预测PI控制[J].微型机与应用,2017,36(1):4-7.
2016-09-14)
程功(1989-),通信作者,男,硕士研究生,主要研究方向:预测PID过程控制算法。E-mail:followcgsky@126.com。
任正云(1969-),男,博士,教授,主要研究方向:先进工业控制、工厂过程控制。
猜你喜欢
农业工程学报(2022年13期)2022-10-09
灌溉排水学报(2022年6期)2022-07-13
水泥工程(2020年4期)2020-12-18
纺织科学研究(2020年1期)2020-05-21
天津教育·下(2018年9期)2018-07-13
制造技术与机床(2017年6期)2018-01-19
自动化仪表(2017年8期)2017-08-30
舰船科学技术(2015年8期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
中国测试(2013年2期)2013-05-03
