
模糊自适应控制在永磁同步电机控制系统中的应用研究
2017-01-10 01:46朱禹杭
黑龙江电力 2016年2期
张 丛,胥 良,朱禹杭
(黑龙江科技大学 电气与控制工程学院,哈尔滨 150022)
模糊自适应控制在永磁同步电机控制系统中的应用研究
张 丛,胥 良,朱禹杭
(黑龙江科技大学 电气与控制工程学院,哈尔滨 150022)
目前,大多数的控制系统都是非线性的,传统的PI控制虽然结构简单,不受控制对象的影响,但在一定程度上受到了局限性。而模糊控制适用于非线性系统,可根据模糊量来对系统进行精确控制。结合这两种方法的优点,提出了模糊PI自适应控制,并将其应用在永磁同步电机调速控制系统中,根据不同的情况自动调节控制器参数。经MATLAB建模仿真,验证了模糊PI自适应控制能提高系统的动态稳定性与鲁棒性。
永磁同步电机;模糊自适应PI控制器;MATLAB
电动汽车驱动控制系统要求控制精度高,可靠性强等优越的性能,这使它成为了控制系统的核心[1]。永磁同步电机(PMSM)体积小,重量轻,转子无发热问题,具有损耗低、电气时间常数小、响应快等特点,因此永磁同步电机已大量应用于电动汽车控制系统中[2]。但由于永磁同步电机存在非线性,外界干扰等因素,传统的PI控制不能达到满意的控制效果。而模糊控制不受被控对象的影响,是利用人的思维与经验,通过模糊逻辑推理系统实现 PI 控制器参数的在线调节,从而使系统具有超调量小,鲁棒性、自适应性强和调节时间短的优点[3]。所以本文提出使用模糊自适应PI控制器,根据外界因素的变化来不断改变PI调节中的比例和积分增益[4],实现对永磁同步机的控制。
1 PMSM的数学模型
在dq坐标系中,定子电压方程为:
ud=Rsid+pψd-ωψquq=Rsiq+pψq+ωψd
(1)
式中:Rs为定子绕组电阻,p为微分算子,ψ为磁链,ω为角速度。
定子磁链方程为:
ψd=Ldid+ψfψq=Lqiq
(2)
式中:ψf为定子上耦合磁链,L为电感。
电磁转矩方程为:
Te=pm[ψfiq+(Ld-Lq)idiq]
(3)
式中:pm为极对数。
2 矢量控制策略
目前,矢量控制策略主要有id=0的控制、cosφ=1的控制、最大转矩电流比控制和恒磁链控制[5]。cosφ=1的控制过程中磁链会随着负载变化而变化,降低了电机功率系数;最大转矩电流比控制方法随着转矩增加,电机端电压会升高,致使功率因素下降;恒磁链控制虽然功率因素高,但会限制最大输出转矩[6];id=0的控制方法,可使直轴电流id分量为0,并通过交轴电流iq来进行控制[7],这种方法有较宽的调速范围、能够在很小电流情况下获得很大的转矩,使控制更加方便准确。所以,id=0成为了矢量控制的首选方案。
在这种控制模式下定子电压方程为:
ud=ωψquq=Rsiq+pψq+ωψd
(4)
电磁转矩方程为:
Te=pmψfiq
(5)
通过上述可以看出,对转矩的控制可以通过控制电流来实现。在控制过程中,可对转速、位置还有三相电流进行采集。内环为电流环,外环为速度环。有坐标变换模块、SVPWM发生模块、PI调节、模糊自适应PID调节等共同完成对永磁同步电机速度的闭环调节[8]。控制系统如图1所示。
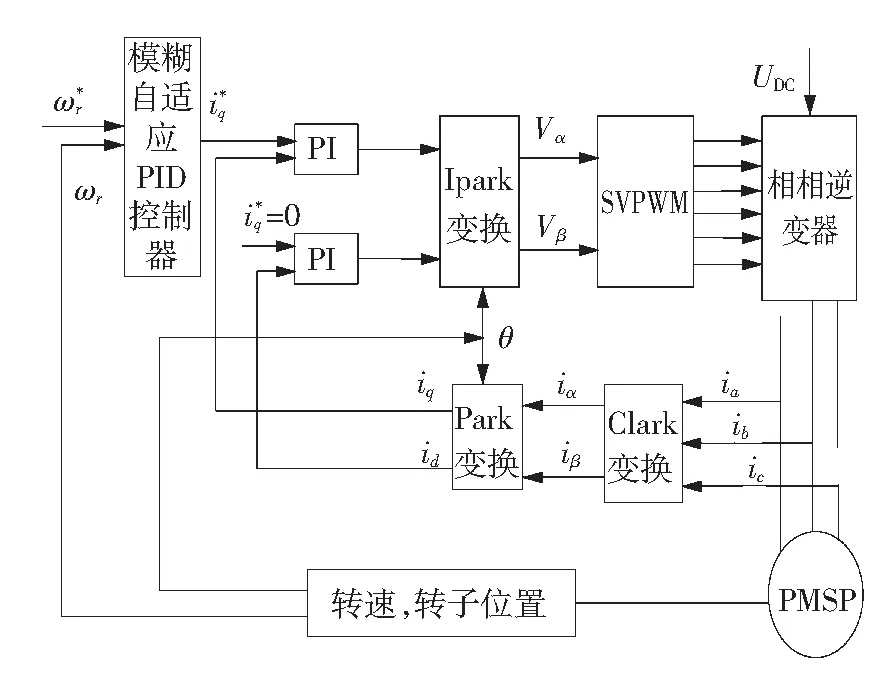
图1 PMSM控制系统
3 模糊控制原理
模糊控制系统一般由定义变量、模糊化、数据库和规则库、模糊推理决策、解模糊5部分组成[9]。控制系统原理图如图2所示。
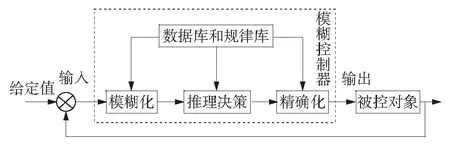
图2 模糊控制原理图
用E代表输入的转速误差,EC代表转速误差变化率。输出变量的P、I修正ΔKP、ΔKI。模糊控制规则如表1所示。其中,NB、NM、NS、ZO、PS、PM、PB分别代表负大、负中、负小、零、正小、正中、正大。隶属度函数如图3所示。
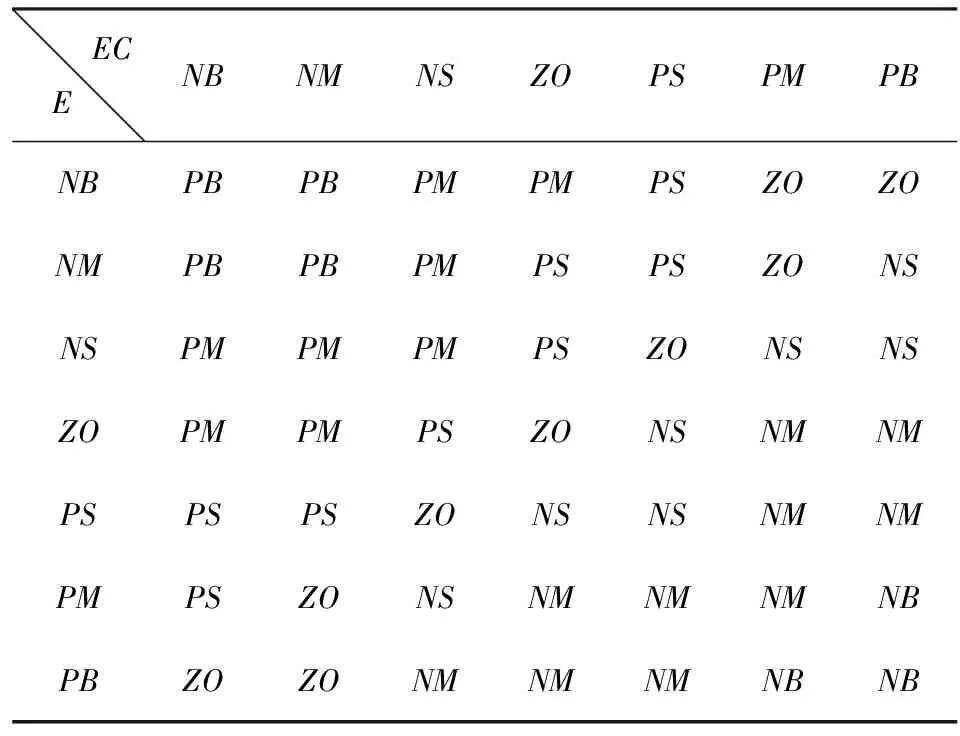
表1 ΔKP规则表规则表
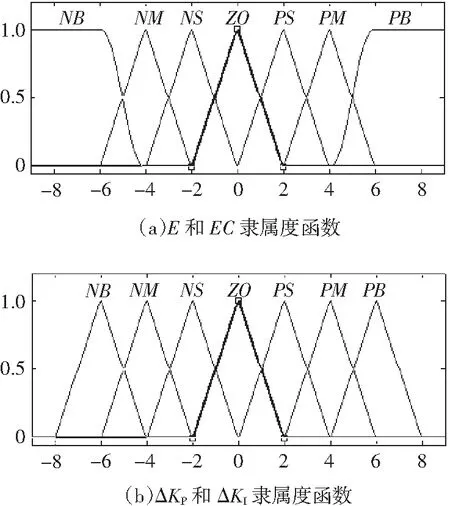
图3 隶属度函数
在MATLAB中建立模糊控制模型,所设计模糊控制器输出控制曲面如图4所示。
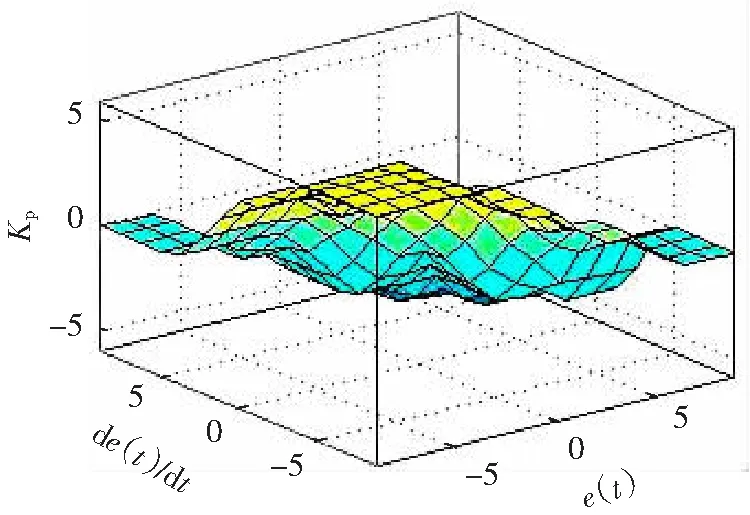
图4 ΔKp 输出控制曲面
4 模型建立与仿真
在MATLAB中建立的仿真模型如图5所示,设定子电阻Rs=2.875 Ω,Ld=Lq=8.5×10-3H,转子磁链为ψf=0.175 Wb,转动惯量J=0.008 kg·m2,给定的转速为300 rad/s,空载启动。
为了方便观察,在t=0.1 s时负载突增到4 N·m,并与同条件下的PI控制进行了对比。
转速、转矩及三相输出电流波形如图6、7、8所示。
由图6~8可明显看出,模糊自适应PI控制比传统PI控制的响应速度快,干扰小,稳定性高,尤其在突加负载后,模糊控制几乎不存在干扰,并>且能很快对系统进行调节,快速的恢复到稳定状态。可见,本文模糊自适应PI调节器能更好地对永磁同步电机调速系统进行控制,满足实验及实际应用要求。
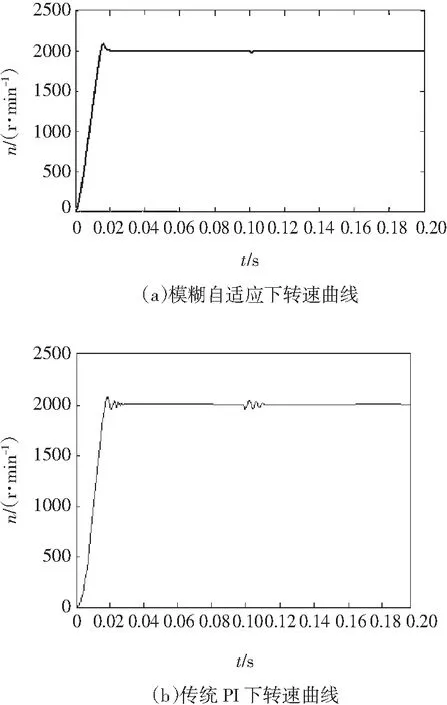
图6 转速曲线
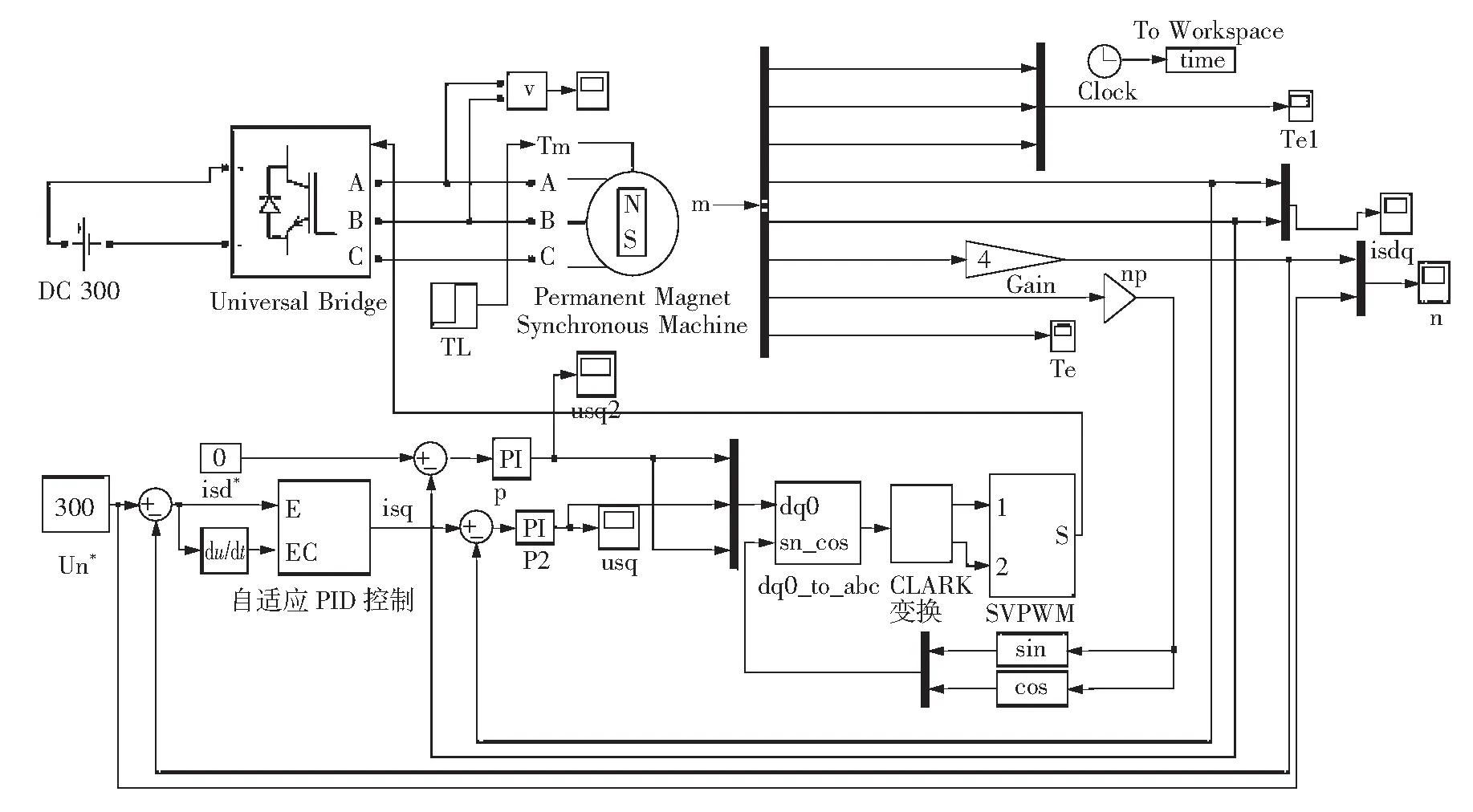
图5 仿真模型
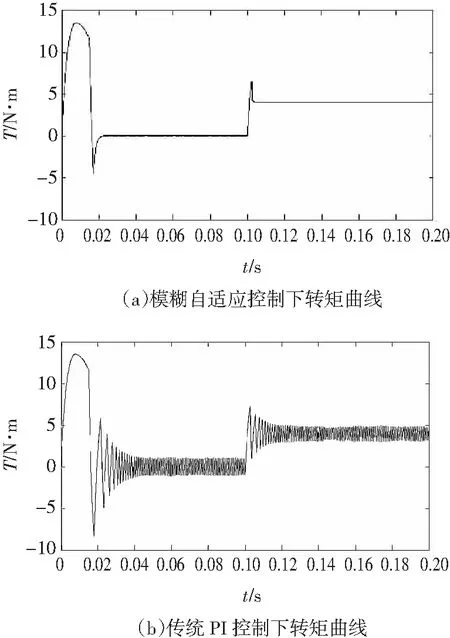
图7 三相输出电流波形
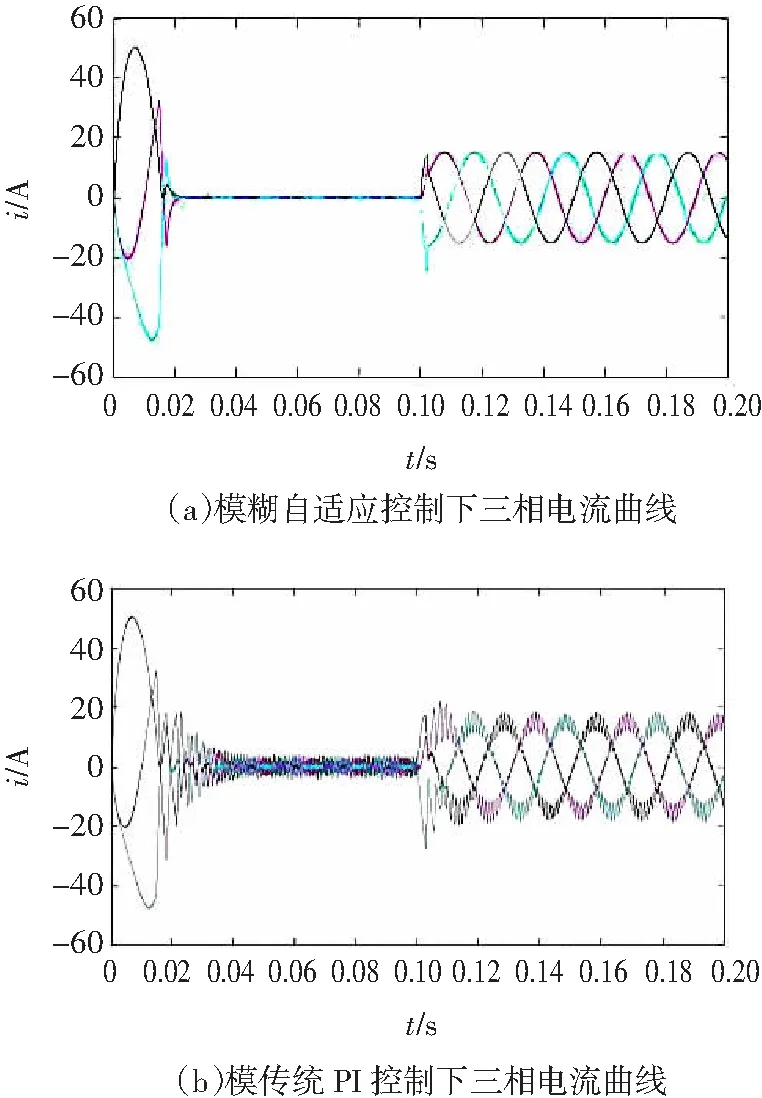
图8 转矩曲线
5 结 语
本文在重点讨论PI控制与模糊控制优缺点基础上,提出了优于两种控制的PI模糊自适应控制,并通过仿真试验证明,该模糊自适应控制比传统PI调节有更快的响应速度,仿真曲线平滑,振动小,超调量小,有较好的跟随性与抗干扰性。而且使用模糊自适应PI调节器能更好地提高系统的稳定性与鲁棒性,所以,其应用在电动汽车永磁同步电机调速系统中予计会有更广阔的发展前景。
[1] 张云红,曾成碧,吴传来,等. 模糊控制在永磁同步电机调速系统中的应用[J].微电机,2012,45(7):69-73. ZHANG Yunhong, ZENG Chengbi, WU Chuanlai, et al. Speed regulating system of permanent magnet synchronous machine based on fuzzy control[J]. Micromotors, 2012,45(7):69-73.
[2] 王洪诚,赵波,陈洁,等.基于Simulink的永磁同步电机矢量控制系统研究 [J].物联网技术,2012,2:83-85. WANG Hongcheng, ZHAO Bo, CHEN Jie, et al. Permanent magnet synchronous motor vector control system based on Simuli-nk [J]. Internet of Things Technologies, 2012,2:83-85.
[3] 赵海亮.双馈异步风力发电机定子匝间短路故障诊断[J].黑龙江电力,2013,3:279-282. ZHAO Hailiang. Fault diagnosis of stator winding inter-turn short circuit in double fed wind induction generator [J]. Heilongjiang Electric Power, 2013,3:279-282.
[4] 罗文明, 王少杰, 陈伟, 等. 基于模糊 PI 控制的永磁同步伺服电机转速系统仿真分析[J].计算机工程与科学,2014,33(11):67-73. LUO Wenming, WANG Shaojie, CHEN Wei, et al. Simulation analysis of permanent magnet synchronous servo motor speed system based on the fuzzy PI control [J]. Computer Engineering Science, 2014,33(11):67-73.
[5] 梁新涛.基于模糊控制的永磁同步电机控制研究 [J].机电信息,2014,33(423):114-116. LIANG Xintao. Research on permanent magnet synchronous motor control based on fuzzy control [J]. Mechanical and Electrical Information, 2014,33(423):114-116.
[6] 林渭勋.现代电力电子技术[M].北京:机械工业出版社,2006. LIN Weixun. Modern power electronics technology [M]. Beijing: China Machine Press, 2006.
[7] 秦帅,张斌,李彬郎. 模糊自抗扰控制在永磁同步电机调速系统的应用[J]. 计算机测量与控制,2014,22(10):3199-3202. QIN Shuai, ZHANG Bin, LI Binlang. Fuzzy auto disturbances rejection control application of permanent magnet synchronous motor control system [J]. Computer Measurement & Control, 2014,22(10):3199-3202.
[8] 原杰,赵永瑞,周茂浩,等. 永磁同步电机模糊 PID 控制建模与仿真[J].系统仿真技术,2013,9(4):361-365. YUAN Jie, ZHAO Yongrui, ZHOU Maohao, et al. Modeling and simulation of permanent magnet synchronous motor based on fuzzy PID control [J]. System Simulation Techonology, 2013,9(4):361-365.
[9] 张德丰. MATLAB/Simulink建模与仿真实例精讲[M].北京:机械工业出版社, 2011. ZHANG Defeng. Intensive teaching of MATLAB/Simulink modeling and simulation examples [M]. Beijing: China Machine Press, 2011.
(责任编辑 郭金光)
Application of fuzzy adaptive control in permanent magnet synchronous motor control system
ZHANG Cong, XU Liang, ZHU Yuhang
(School of Electrical & Control Engineering, Heilongjiang University of Science & Technology, Harbin 150022, China)
At present, most of the control systems are nonlinear. Although the traditional PI control structure is simple, without being affected by the influence of control object, it is limited to some extent. Fuzzy control is, however, suitable in nonlinear system, which can be precisely controlled according to fuzzy quantity.The advantages of combining these two methods, this paper proposed the fuzzy PI adaptive control which was applied in the permanent magnet synchronous motor speed control system to automatically adjust controller parameters under different conditions. Through MATLAB modeling simulation, the fuzzy PI adaptive control is verified to succeed in improving dynamic stability and robustness of the system.
PMSM; fuzzy adaptive PI controller; MATLAB
2015-09-07。
张 丛(1990—),女,硕士研究生,研究方向为矿山电力传动与控制。
TP273; TM341
A
2095-6843(2016)02-0165-04
猜你喜欢
微电机(2022年8期)2022-10-12
电机与控制应用(2022年1期)2022-09-01
舰船科学技术(2022年11期)2022-07-15
电机与控制应用(2022年4期)2022-06-27
防爆电机(2022年3期)2022-06-17
微特电机(2021年6期)2021-06-22
防爆电机(2021年2期)2021-06-09
防爆电机(2020年6期)2020-12-14
自动化学报(2019年6期)2019-07-23
自动化学报(2016年8期)2016-04-16
