
农用车辆悬架的干扰解耦H∞观测器设计
2017-01-07 10:21王刚
贵州农机化 2017年4期
王 刚
(贵州理工学院 机械工程学院,贵州 贵阳 550003)
0 引言
农用车辆经常工作在路面环境恶劣的工况下,由于长时间的振动会造成驾驶人员的疲劳和疼痛,对车辆进行主动减振是有意义的研究工作[1]。由于H∞控制易于处理该类型的振动控制问题,已经取得了大量的研究成果,该方法能在保证时域约束的同时,最大化的提高悬架的舒适性[2-5]。
从关于H∞控制的文献中可看出,所设计的控制器几乎都依赖于全部或部分状态量的测量[6,7]。然而在实际应用中,由于传感器类型及安装位置的限制,状态变量仅部分可测或全不可测,以文献[8]的松本汽车为例,仅簧载与非簧载质量处的加速度可测。导致在实际应用中,即使配备了主动悬架的汽车也难以构成相应的闭环系统。考虑到目前针对农用车辆主动悬架的观测器设计研究较为少见,因此有必要研究在状态量不可测时,如何实现车辆主动悬架的闭环控制策略。本文提出了一种基于干扰解耦的H∞观测器设计方法,最后通过一个数值实例验证了所提方法的有效性。
1 模型建模与问题描述
考虑到大多数文献均以1/4悬架模型为研究对象,为了便于说明该方法的有效性,这里亦采用如图1所示的基于状态观测器的1/4车悬架模型。图中ms,mu分别代表簧载与非簧载质量,ks,cs为主动悬架的刚度与阻尼系数,ku为轮胎的可压缩刚度系数,xs,xu分别为簧载与非簧载质量的垂直位移,q为路面不平度激励为观测器估计的状态变量,u为主动控制力,x¨s,分别为加速度计测量的加速度信息。
在大多数文献中,均取系统的状态变量为:

并假定全部或部分状态量可测。而在实际应用当中,限于传感器类型及安装位置的限制,仅簧载与非簧载质量的加速度方便测量。故本文的思路为仅以加速度为已知量,通过设计的状态观测器去估计系统的全部状态变量,并将其应用于悬架的主动控制当中,故定义可测量为
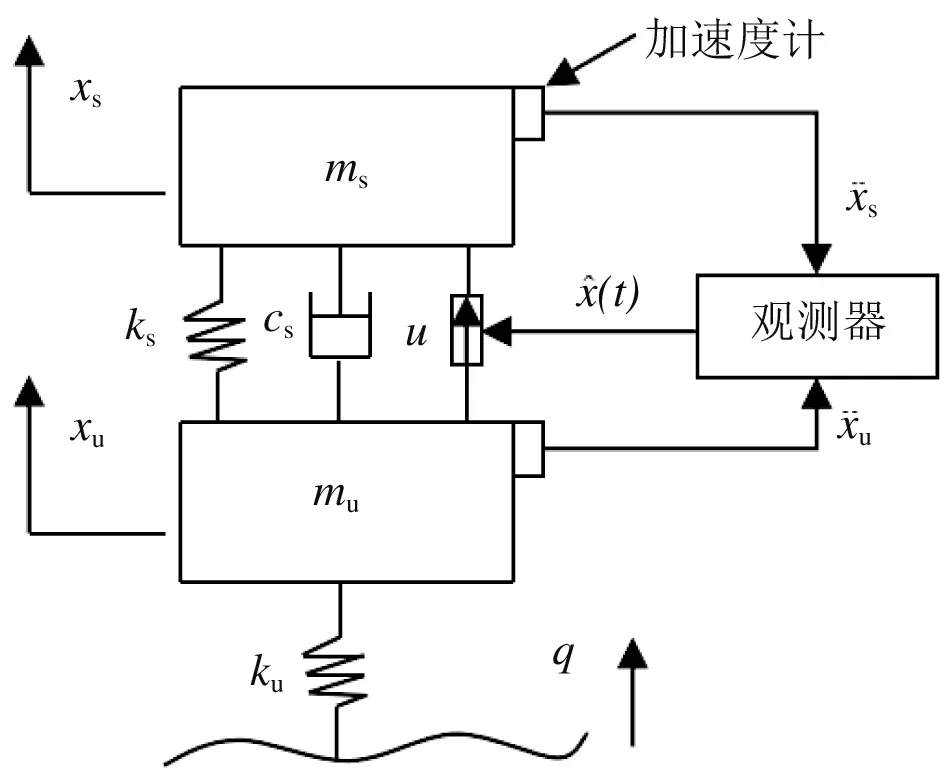
图1 基于状态观测器的1/4车悬架模型
根据状态变量(1),可得系统的状态空间方程:

2 干扰解耦观测器设计
在求出所需的控制器增益矩阵后,便可按如下步骤设计系统的状态观测器。这里取理想情况下的状态反馈作为控制输入,即u(t)=Kx(t),这样不仅可以便于之后的干扰解耦,还可以避免系统的误差积累。将其代入(2)中可得如下的闭环系统:
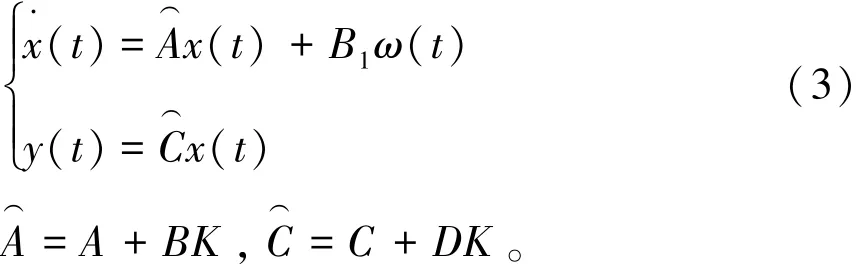
定义所设计的全阶状态观测器形式如下:

N,L,E为待求的观测器矩阵。观测系统的误差方程为



P B1=0。
由文献[9]可知,虽然可根据条件(1)(2)求解出精确的观测器矩阵,但由于极点配置等问题在实际中难以实现,且当某些矩阵轶条件不满足时,并不存在精确的可行解。故本文考虑采用H∞的方法在保证系统收敛稳定的基础上,最小化干扰对估计量的影响。

为了求得满足命题1的观测器矩阵,首先对方程(5)进行如下的未知矩阵变换。

根据未知矩阵Λ,上式等价于方程Λ·Θ=Γ,其中

由广义逆性质可知,上式有解的充分必要条件为:

若条件(7)不满足,则命题1中的H∞-观测器不存在。若条件(7)满足,则可解得满足系统收敛稳定的未知矩阵(Λ=Γ Θ++Φ I12-Θ Θ+),其中Φ为合适维数的任意矩阵,Θ+为矩阵Θ的广义逆矩阵,由满轶分解可得:

其 中FG=Θ,rank(F)=rank(G)=rank( Θ)。

从(9)式中可看出,为了满足命题1中的条件,需要设计一个观测器矩阵Φ,使得干扰ω(t)对e(t)的能量增益降低到ϑmin以下。由有界实引理[10]可得如下的推论。
推论1:给定正标量ϑ,对于系统(3)及误差方程(5),若存在对称正定矩阵X及一般矩阵满足如下LMI,则命题1成立。

若推论1有可行解,则相应的观测器矩阵为:

在实际应用中,由于量测噪声的影响,若观测器的极点具有较高的虚部,则会引起系统的振荡与失稳现象。因此这里应用LMI域方法[9]将观测系统的极点配置在如下的梯形区域D内。

应用推论2可将观测系统的极点配置在如图2所示区域内,从而保证系统的鲁棒性。
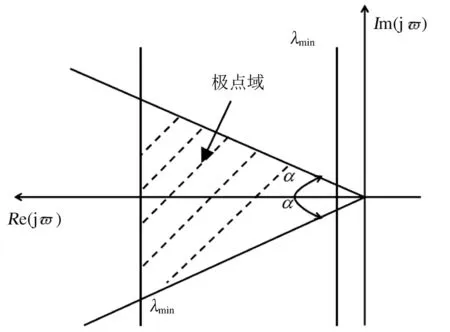
图2 LMI极点域
推论2 :给定正标量ϑ,对于系统(3)及误差方程(5),若存在对称正定矩阵X及一般矩阵满足如下LMIs,则命题1成立,且观测系统的极点可配置在区域D内。
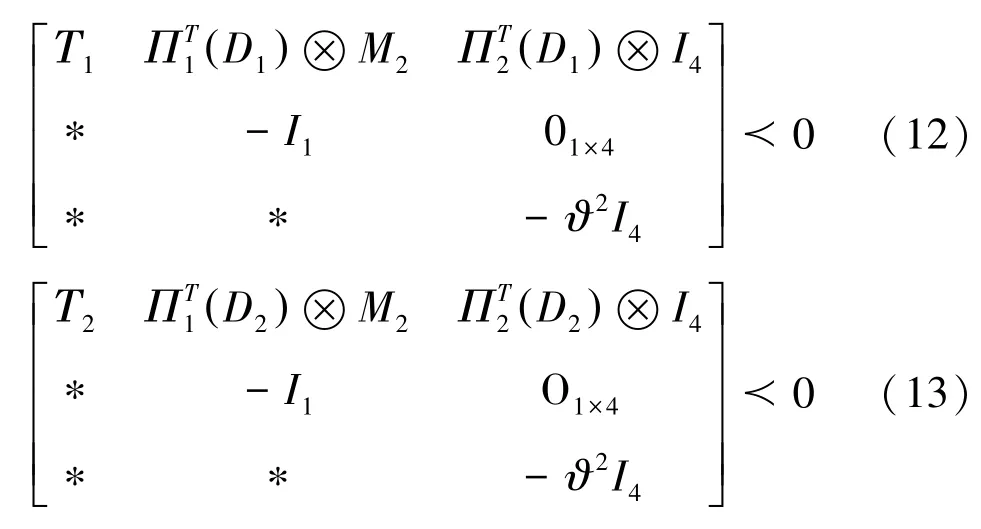

相应的证明过程可参考文献[9]中的LMI域极点配置方法。。
3 数值验证
为了验证所提设计方法的有效性,这里以图1所示的1/4悬架模型为例给出数值验证。悬架模型参数如表1所示。极点配置参数选为α=π/4,λmin=10,λmax=100。

表1 悬架模型参数
根据上述参数,可求出满足系统性能要求的控制器增益矩阵及观测器矩阵。具体步骤如下:
第一步:首先求解有限频域控制器增益矩阵为[3]。
第二步:若参数矩阵轶满足条件(7),表示使系统收敛稳定的未知矩阵存在,进一步可求得广义逆矩阵Θ+。
应用求出的观测器矩阵,可得干扰对各误差分量的奇异值响应曲线(图3)。从图中可看出干扰对各误差分量的影响情况,其中在0.01-100 Hz范围内的最大能量增益值均小于2.5×10-6,可见该方法具有较小的保守性。
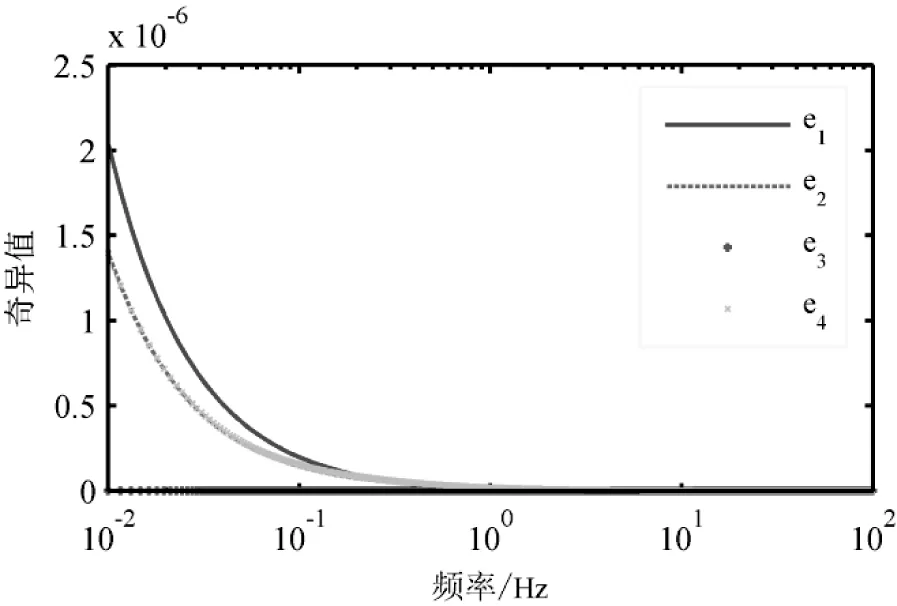
图3 误差e的奇异值响应曲线
为了验证该方法的时域观测情况及控制效果,应用求出的观测器矩阵及控制器增益矩阵进行时域仿真分析。选择如下函数作为路面不平度干扰:

图4 状态观测值
图4为该包块激励下的状态观测量与悬架系统实际状态量的对比曲线,从图中可看出所设计的观测器可以很好的估计实际的状态变量,且误差e的量级均小于10-4。
4 结论
由于在实际的农用车辆悬架主动控制当中,限于传感器的类型及安装位置的不便,状态变量仅部分可测或全不可测,而大多数主动控制方法均依赖于系统的状态变量的测量。针对上述问题,本文提出了一类基于干扰解耦的H∞观测器设计方法,并将其应用于车辆悬架的有限频域多目标控制当中。最后通过数值实例给出了观测器的设计过程,并验证了所提方法的有效性,在包块激励及随机路面激励下,均能将观测误差的量级降低到10-4以下。

猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
数字技术与应用(2021年2期)2021-04-22
湖南大学学报·自然科学版(2021年1期)2021-02-21
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
智能计算机与应用(2020年10期)2020-03-18
北京航空航天大学学报(2017年6期)2017-11-23
电子制作(2017年24期)2017-02-02
导弹与航天运载技术(2016年2期)2016-10-14
北京汽车(2016年6期)2016-10-13
