船舶电力推进六相感应电机控制系统设计
2017-01-07 01:32王五桂张兰勇陈辉煌
兵器装备工程学报 2016年12期
王五桂,张兰勇,陈辉煌
(1.中国舰船研究设计中心,武汉 430064; 2.哈尔滨工程大学, 哈尔滨 150001;3.毫米波国家重点实验室,南京 210096)
【信息科学与控制工程】
船舶电力推进六相感应电机控制系统设计
王五桂1,张兰勇2,3,陈辉煌2
(1.中国舰船研究设计中心,武汉 430064; 2.哈尔滨工程大学, 哈尔滨 150001;3.毫米波国家重点实验室,南京 210096)
船舶电力推进是一种先进的推进方式,近几十年达到了空前繁荣。推进电动机及其控制技术是船舶电力推进的关键技术之一,本文介绍的主要是六相感应电机矢量控制系统。通过六相感应电机在d-q坐标系的数学模型,给出了基于TMS320F2812DSP的六相感应电机矢量控制系统的实现,并通过实验验证了本文所提的控制策略。 本研究成果有望应用于大功率船用驱动电机。
船舶电力推进;六相感应电机;矢量控制;DSP
随着发电系统和变频传动技术的快速发展,电力推进在各种船舶及近海设备中得到成功应用,电力推进已成为21世纪海洋船舶技术装备的重要发展方向[1]。
多相感应电机驱动系统已有30多年的发展历史,尤其近年来,除了用于舰船驱动、宇航推进系统等国防军事领域外,也逐步在核电站、电动混合燃料车辆、电力机车牵引等场合推广[2]。多相感应电机技术较传统的三相感应电机有很多优点:首先,多相感应电机因高相数的使用避免了功率器件的串并联,设计者完全可以采用标准功率模块进行变频器设计,可以用低压功率器件实现大功率;其次,多相结构有利于电机磁动势波形的改善、线电压的减小以及工作效率的提高,并减小噪声和损耗;多相电机还易于组成多相冗余形式,当多相感应电机的一个或多个定子绕组开路的情况下,不会致使电机停机,而只需降载运行。多相感应电机调速系统得到了广泛的研究[3]。
随着电力电子技术的迅速发展以及电机控制策略的不断创新,多相感应电机传动系统的研究也取得了一定的成就。Y.Zhao和T.A.Lipo在六相感应电机中引入了空间矢量解耦的方法,将六维空间分解为相互正交的三个子空间,通过使用空间矢量合成技术,实现了电机的高性能控制。R.Kianinezhad等人在六相感应电机中加入了直接转矩控制技术,也取得了很好的控制效果。
本文首先对六相感应电机的数学模型以及六相感应电机矢量控制技术进行了分析,结合六相感应电机的数学模型和六相感应电机矢量控制技术,设计完成了基于DSP六相感应电机矢量控制系统的硬件电路,设计了实现六相感应电机矢量控制的程序。最后通过实验,验证了该控制系统的可行性。
1 六相感应电机数学模型
首先是建立六相感应电机数学模型,在研究六相感应电机的数学模型时,作如下假定[4]:
① 电机定、转子六相绕组在空间完全对称;
② 电机定、转子表面光滑、无齿槽效应;
③ 电机气隙磁势在空间正弦分布;
④ 铁芯的涡流、饱和、磁滞损耗忽略不计。
六相感应电机在自然坐标系下的数学模型为[5]:
(1)
六相感应电机是一个多变量、强耦合、非线性系统,直接求解这些方程有一定难度,通过一些解耦变换,可使问题简化。六相谐波基变换矩阵T6×6如下:
(2)
通过坐标变换,将自然坐标系下的各个量分解到d-q子空间、z1-z2子空间和o1-o2子空间。只有d-q子空间的分量产生旋转的磁动势(MMF),从而完成机电b能量的转换;而其他子空间的分量不产生旋转的MMF,没有定、转子之间的相互作用,只是在定子绕组中产生谐波电流,引起铜损[6]。
转子相对于定子旋转,可以利用旋转变换,把转子上的电压、电流量变换到定子上。此时,固定在定子上的d-q坐标系也被称为α-β坐标系。转子到定子的变换矩阵为:
(3)
将旋转变换矩阵Trs作用于d-q子空间的电压方程两侧,而且该电机采用鼠笼型转子,转子电压为0,得六相感应电机在α-β坐标系下的电压方程:
(4)
六相感应电机在d-q坐标系下的电压方程与三相感应电机在两相旋转坐标系下的电压方程是一致的。而三相感应电机的一些控制策略如直接转矩控制和矢量控制等都是基于三相感应电机在两相静止坐标系下的电压方程实现的,因此这些控制策略也可以应用到六相感应电机的控制中。
本设计中采用转子磁场定向技术[7]所示。采用转子磁场定向时,选择d轴的方向和转子磁场方向相同,则有:
(5)
(6)
(7)
(8)
式中:Tr为转子时间常数,Tr=Lr/Rr;ψr为转子磁链;ωs为转差。
六相感应电机采用电压源型逆变器供电,电压源型逆变器共有64种开关状态,与开关状态的64种空间电压矢量一一对应的。本文中采用的是空间矢量脉宽调制(SVPWM)技术,SVPWM将逆变器和电动机作为一个整体考虑,从电动机的角度出发,着眼于如何使电动机的“磁链空间矢量”运动轨迹逼近圆形。具体做法是利用逆变器的不同开关状态所形成的不同的“电压空间矢量”控制实际的“磁链空间矢量”,使其逼近圆形。与传统的SPWM相比,其谐波电流和转矩脉动更小、直流侧电压利用率更高[8]。
2 六相感应电机矢量控制系统

3 六相感应电机矢量控制系统硬件电路设计
基于TMS320F2812的矢量控制系统电路结构框图如图2。整个系统为交直交变压变频电路,由主回路、控制回路和辅助回路三大部分组成。系统主电路采用的变频器是交-直-交电压源型变压变频器,以DSP数字处理器为核心完成矢量控制核心算法、SVPWM脉冲的产生等。其他辅助部分为提供电源设计,为系统中各芯片提供所需的电压。
本系统的硬件设计主要完成六相感应电机的控制器设计,感应电机控制器主要包括以下两部分,功率电路和控制电路。功率电路主要完成功率的转换,主要形式是AC-DC-AC的电力转换。控制电路主要是完成各种信号的接收,经过控制计算发出控制信号控制功率电路,以实现对六相感应电机的控制。控制器包括两块电路板,功率电路和控制电路分别放到两个电路板上,这样可以避免两个电路之间的相互干扰。控制器主要包括两个电源的输入,380 V的三相电供给功率电路,220 V的单相电产生各种控制电供给功率电路和控制电路[10]。
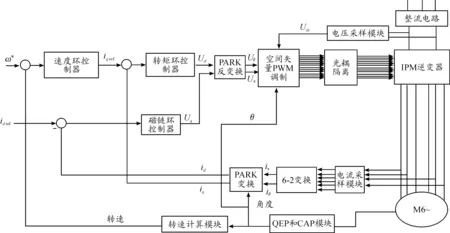
图1 六相感应电机矢量控制系统
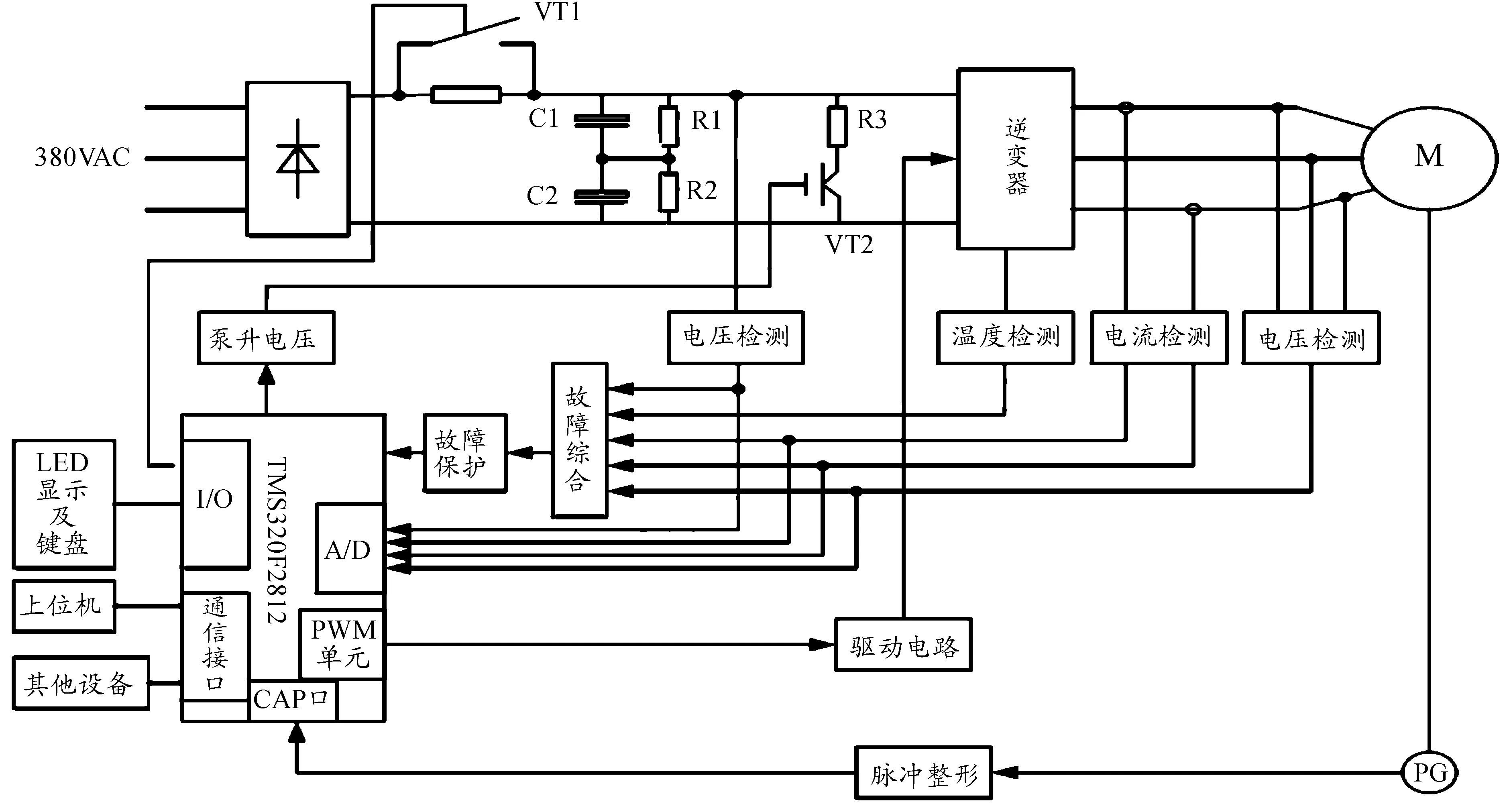
图2 矢量控制系统电路结构
3.1 功率电路的设计
本设计中使用的是应用最为广泛的交-直-交电压型逆变器,其基本结构如图2所示。电路主要分为两个部分:整流部分,交-直(AC-DC);逆变部分,直-交(DC-AC)。
3.1.1 整流电路
系统的输入为三相交流电,整流电路的目的就是把三相交流电转变为直流电。本系统采用的是三相不可控整流桥(60 A,1 600 V),整流电路输出的直流电会出现脉动,而且由于整流部分以及负载变化也会产生脉动,因此在整流电路输出的直流母线上需要并入大电容。直流母线上的电压平均值为U=1.35×380=514 V。在本系统中采用的是两个容量为3 300 μF,耐压为450 V的电容串联,这样可以有效抑制直流母线上的谐波。
在给整流电路上电的时候,产生大电流,如果不进行限流的话会对元件产生冲击。因此加入继电器、限流电阻,在上电开始时继电器断开,这时候限流电阻串入母线,给电流充电;当母线电压高于一定值时,接通继电器,使限流电阻切开。
3.1.2 逆变电路
本系统采用的功率器件是智能功率模块IPM,它内部含有高性能的IGBT,使用IPM具有开发周期短,不需要设计外围保护电路等优点。六相感应电机的逆变电路包括两个三相全桥,因此需要六路相互隔离的驱动电源给IPM供电,在选用驱动电源时,为了保证IPM能够稳定工作,需要保证驱动电源输出电压的品质以及驱动电源的功率。在实验过程中发现,给IPM供电的驱动电源尽量只给IPM供电,不要给其他部分供电。
3.2 控制电路的设计
3.2.1 主控芯片
本控制系统使用的控制芯片为TI公司生产的TMS320F2812,它是专门用于控制的一款高性能、多功能、高性价比的定点32位处理芯片,最高工作频率可以达到150 MHz。TMS320F2812包括16路12位精度的ADC,以及2个事件管理器(EVA和EVB)。每个事件管理器具有3个全比较单元,能产生6路带可编程死区的PWM信号。因此,TMS320F2812可以完成对六相感应电机的控制。
3.2.2 光耦隔离电路
控制芯片输出端位于低压控制系统,而IPM控制信号的输入端则是电机功率驱动所在的高压系统,为了防止高压系统对低压系统的影响,需要在高压系统和低压系统之间加入光耦隔离电路。为了防止DSP的输出功率不足以驱动光耦隔离电路,所以在DSP的PWM输出端加入一个总线收发器提供驱动能力。结构如图3所示。
3.2.3 电流检测电路
本设计中使用的电流传感器为霍尔型电流传感器,输出电流范围为0.5~4.5 V,而TMS320F2812的ADC模块的输入范围为0~3 V,因此需要加入电压调理电路,使得输入电压满足DSP的要求。定子电流检测电路如图4所示。以其中一路信号为例,ADINA0为电流传感器输出的电压信号,首先电压信号经过一个运放,把这个运放接成电压跟随器的形式,提高信号的带负载能力。电压跟随器的输出端为ADC0,然后ADC0经过电阻分压,ADC-0信号的电压范围为0~3 V,ADC-0接入TMS320F2812的引脚ADCINA0。
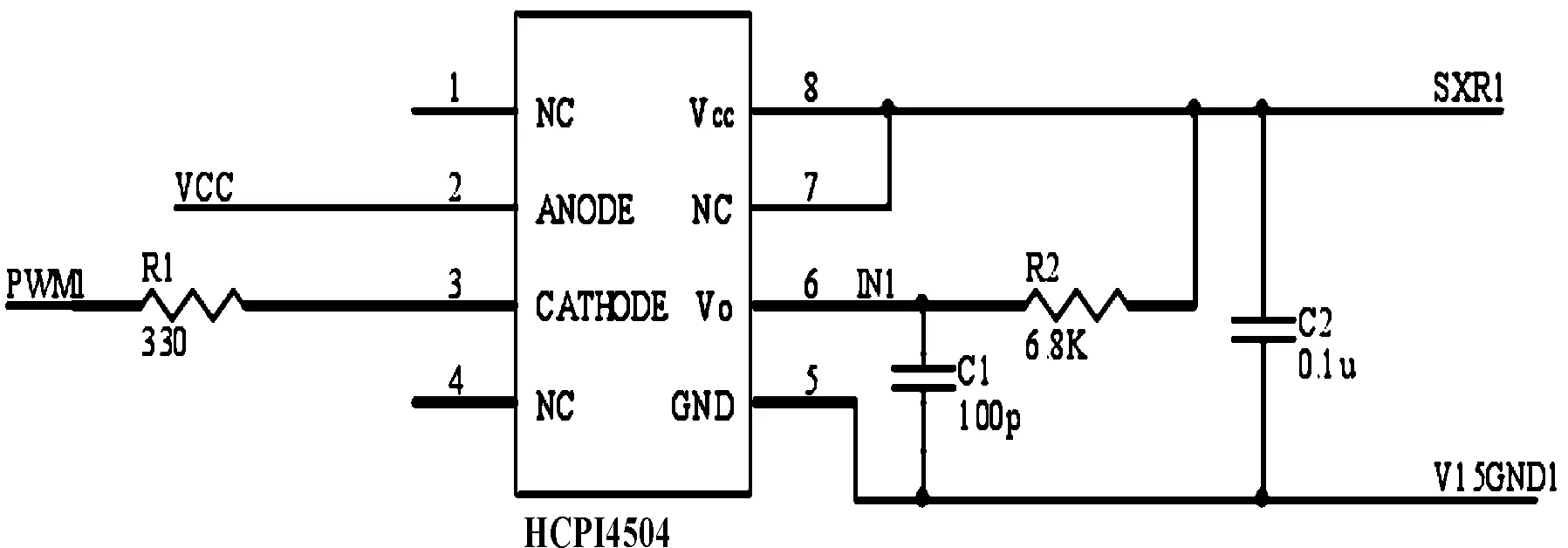
图3 信号隔离电路
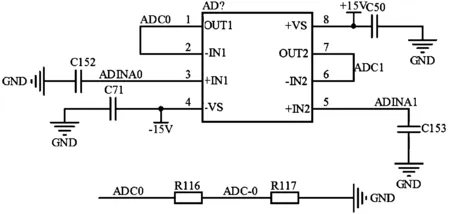
图4 定子电流检测电路
3.2.4 转速检测电路
在六相感应电机的矢量控制系统中,转速的测量非常重要,直接影响控制精度。本设计中采用增量式广电编码器,光电编码器输出的信号为差分信号。转速检测电路如图5所示。
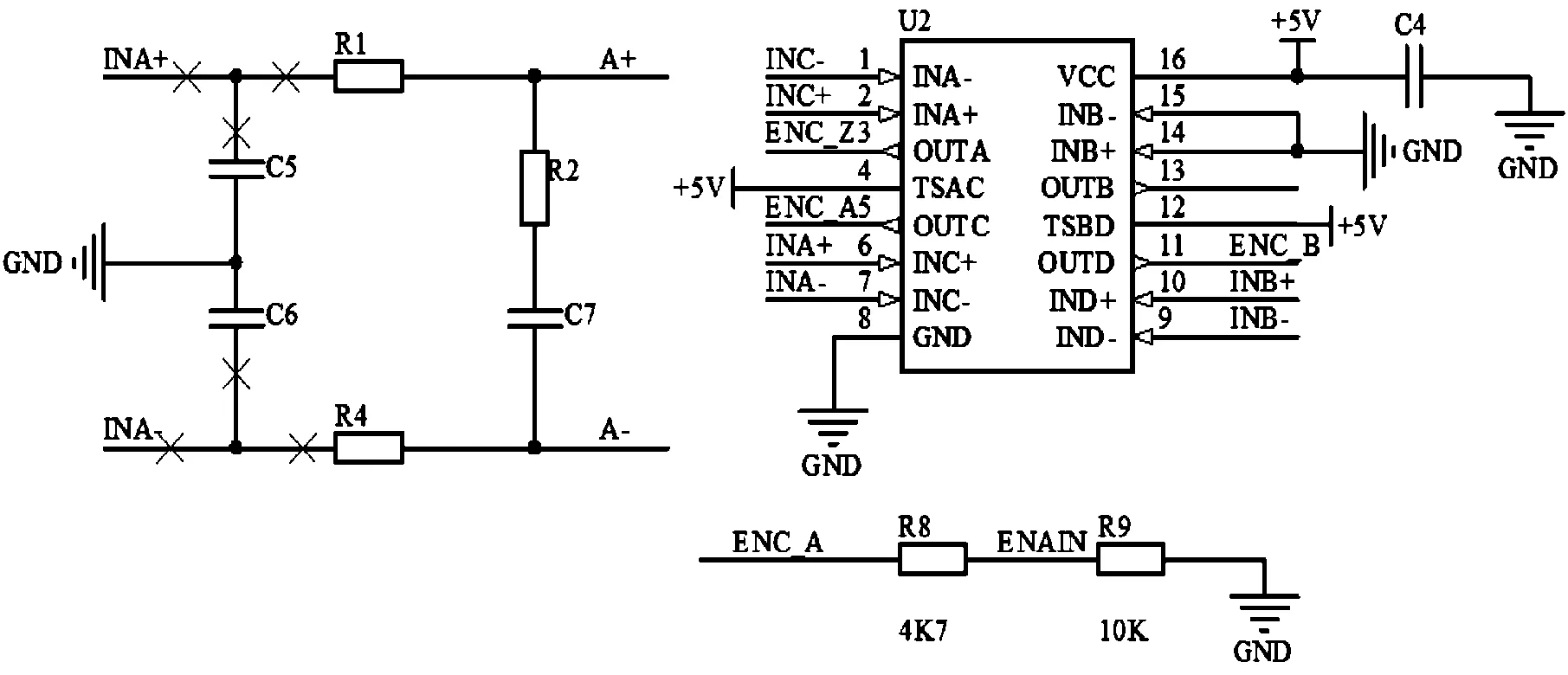
图5 转速检测电路
在本设计中光电编码器的供电电压为Vcc=5 V,A+、A-、B+、B-、C+、C-为光电编码器的输出端,输入信号经过一个π形滤波器,为输入信号进行整形。此时输入信号的电平为TTL电平,高电平为5 V,大于DSP对输入信号的要求的高电平3.3 V。通过电阻进行分压,使输入信号的高电平转化为3.3 V。经过转化后的信号接到了DSP上的QEP引脚。
3.2.5 母线电压检测电路
本系统中采用的是交-直-交电压型逆变器,母线电压的变化对逆变系统的影响较大。当母线电压过低时,不能满足系统的要求,应该尽快切断电源;当母线电压过高时,会对逆变系统造成损坏,更严重的会造成IPM损坏。为了实时监测母线电压,防止母线电压过低或过高,设计了母线电压检测电路。
母线电压检测电路分为比例运放电路和光耦隔离电路。比例运放电路就是将过高的母线电压经过运算放大器进行缩小,本文中直流母线的电压为0~514 V,经过比例运放电路的输出电压为0~2.57 V。光耦隔离电路的目的是将高压系统和低压系统进行光电隔离。
3.2.6 串行通讯电路
本设计中采用的是RS-485通讯标准。RS-485是电子工业协会(EIA)于1983年制定并发布的,与RS-232相比,RS-485有传输距离长、传输速率高、抗干扰能力强等优点。
本设计中所采用的通讯接口器件为IL485-3 V。IL485-3V的3脚接DSP的SCIRXDB脚,用作串行通讯的接受端;6脚接DSP的SCITXDB脚,用作串行通讯的发送端。IL485-3V的供电电压为3.3 V,可以兼容3.3 V的电平,因此该通讯接口芯片可以直接和DSP芯片相连,中间不需电平转换。
4 系统软件程序设计
系统软件程序由主程序模块和PWM中断程序模块组成,本系统所采用的转子磁场定向策略,系统的主程序如图6所示。
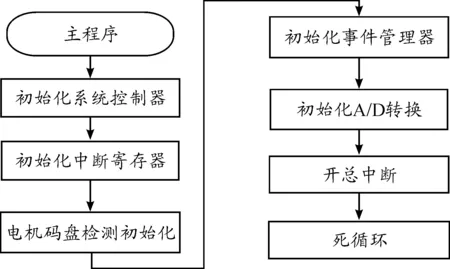
图6 主程序流程
大部分的算法程序都在PWM。
中断服务程序完成电流采样、转速采样、PID算法、参数辨识算法和SVPWM产生等。PWM的中断周期为0.1 ms,此即为电流采样周期,速度环的采样周期为电流环的10倍,为1 ms。
5 实验结果
本次实验所采用的电机为一台10 kW六相6对极感应电机,采用双三相全桥逆变器作为拓扑机构,IPM作为功率器件进行仿真验证。本设计中的开关频率为3 kHz。主要参数如下:PN=2 400 W,TN=1 00 N·m,nN=155 r/min,Rr6=0.457 8 Ω,p=4,Ld6=0.002 85H,Lq6=0.003 34H,B=0.000 3 N·m/(rad/s),J=0.001 469 kg/m2,ψf=0.171 Wb。
图7为DSP输出PWM信号测试结果图,由于PWM信号为低电平有效,因此从图中可以清晰的看到U相的上下桥臂已经设置的死区时间,可以有效防止上下桥臂直通造成短路。
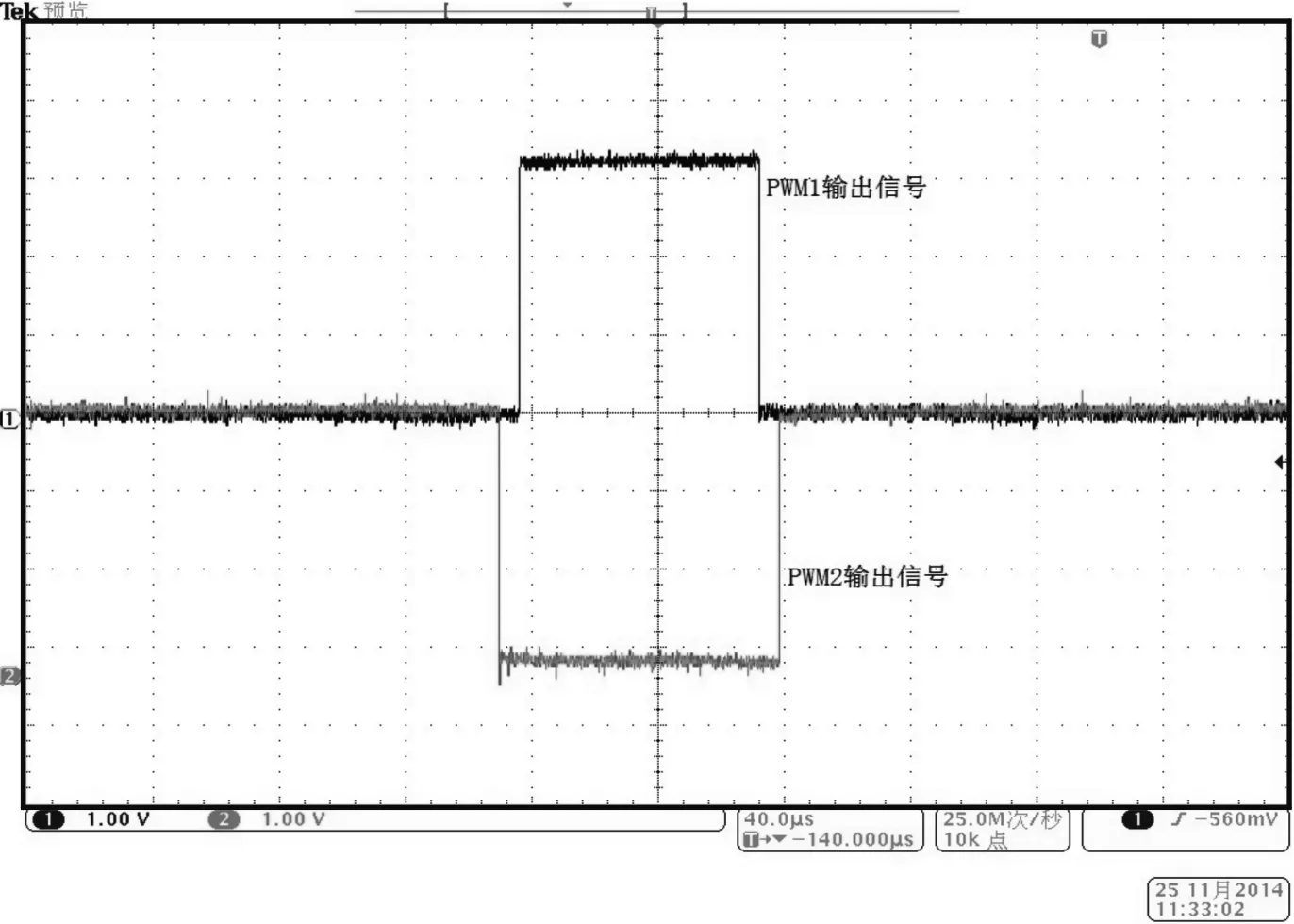
图7 DSP输出PWM信号
1) 给定速度n=155 r/min时,六相感应电机在空载起动的相关曲线如图8。
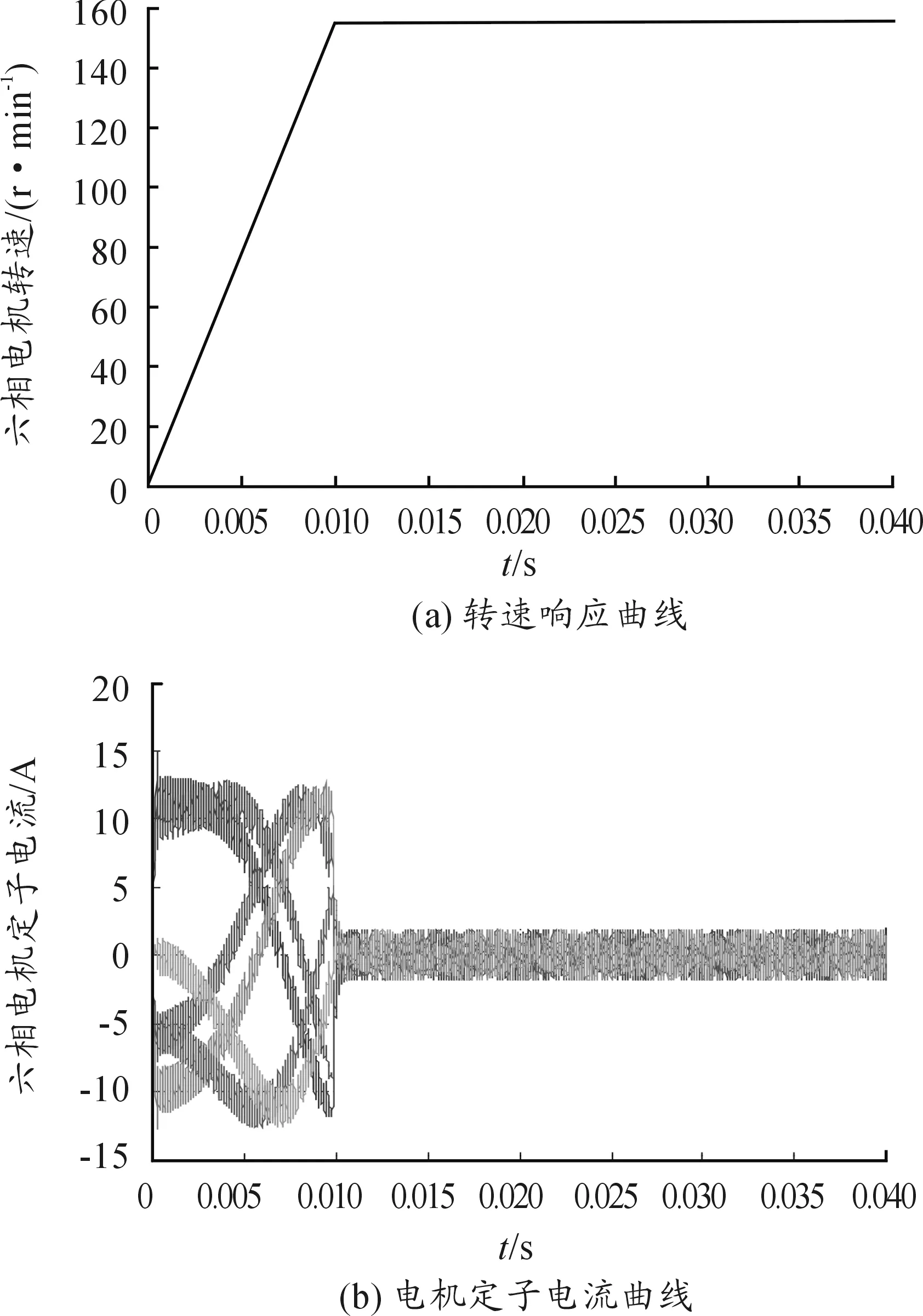
图8 空载起动时的六相感应电机转速响应曲线和电机定子电流曲线
从图8可以看到:起动时,感应电机转速迅速增大,达到给定转速后,出现一定的浮动,最终稳定。上升时间tr=0.065 s,调整时间ts=0.07 s。响应过程电机电流基本无振荡现象,电流有较好的正弦性,达到设计要求。
2) 在0.02 s时突加负载10 N·m,六相感应电机的仿真相关曲线如图9。

图9 突加负载时六相感应电机转速和电机电流曲线
从图9可以看到,从施加负载到系统趋于稳定,系统的恢复时间tv=0.005 s,表明感应电机能较快地稳定于给定速度。另外,电机电流能很好跟随转速变化,系统具有较好的反应性和稳态性能。
六相感应电机带不同负载转矩时的转速、电流的暂态过程和稳态结果,仿真结果良好,说明六相感应电机模型正确。
6 结论
本文分析了六相感应电机的数学模型及六相感应电机的矢量控制原理,并且根据矢量控制原理完成了基于DSP2812的六相感应电机矢量控制系统硬件电路的设计。设计中功率电路和控制电路分别放到两个电路板上,避免功率电路对控制电路的信号干扰。同时完成了六相感应电机矢量控制的程序设计。
[1] 汤建华,赵乌恩,杨子龙. 船舶综合电力推进技术发展思路研究[J]. 舰船科学技术,2010,05:133-138.
[2] STEVEN WILLIAMSON,SANDY SMITH, Pulsating torque and losses in multiphase induction machines [J]. IEEE Trans on Industry Applications,2003,39(4):986-993.
[3] CHE H S,LEVI E.Operation of a Six-Phase Induction Machine Using Series-Connected Machine-Side Converters[J].IEEE Transactions on Industrial Electronics,2014,61:164-176.
[4] 姜程.基于DSP的六相感应电机矢量控制系统[D].重庆:重庆理工大学,2011.
[5] 高景德,王祥珩,李发海等.交流电机及其系统分析[M].北京:清华大学出版社,2005.
[6] 李山.多相感应电机控制技术的研究[D].重庆:重庆大学,2009.
[7] 陈伯时,陈敏逊.交流调速系统[M].北京:机械工业出版社,2013.
[8] MIRANDA R S,JACOBINA C B,LIMA A M N.Modeling And Analysis Of Six-phase Induction Machine Under Fault Condition[C]//Power Electronics Conference.COBEP’09. Brazilian, 2009:824-829.
[9] JIAN Liu, YANG Guijie, SU Jianyong, An Improved Vector Control Method For Dual Three Phase PMSG[C]//IEEE 7th International Power Electronics And Motion Control Conference-ECCE Asia,2012:1252-1256.
[10]刘海庆.中功率表贴式永磁同步电机伺服系统研究[D].哈尔滨:哈尔滨工程大学,2013.
(责任编辑杨继森)
Six-Phase Induction Motor Control System of Ship Electric Propulsion
WANG Wu-gui1, ZHANG Lan-yong2,3, CHEN Hui-huang2
(1.China Ship Development and Design Center, Wuhan 430064, China; 2.Harbin Engineering University, Harbin 150001, China; 3.State Key Laboratory of Millimeter Waves, Nanjing 210096, China)
Ship electric propulsion is an advanced way of propulsion, which has achieved unprecedentedly prosperity in the recent decades. The control technique of propulsion motor is one of the key technologies of ship electric propulsion. This paper introduced vector control method of six-phase induction motor. Through the six-phase induction motor in the mathematical model ofd-qcoordinate system, the method realized vector control system based on TMS320F2812 DSP was provided. Experimental research results show that the control strategy is effective. The results of this study are expected to be applied to large power marine motor.
ship electric propulsion; six-phase induction motor;vector control; DSP
2016-09-08;
国家自然科学基金(51579047); 国家科技支撑计划(2013BAG25B01);东南大学毫米波国家重点实验室开放课题(K201707);MPRD专项资助(IEP14001);博士点基金资助课题(20132304120015);中央高校基本科研业务费(HEUCF160414)
王五桂(1985—),工学博士,工程师,主要从事船舶电气工程设计研究。
10.11809/scbgxb2016.12.020
王五桂,张兰勇,陈辉煌.船舶电力推进六相感应电机控制系统设计[J].兵器装备工程学报,2016(12):84-89.
format:WANG Wu-gui, ZHANG Lan-yong, CHEN Hui-huang.Six-Phase Induction Motor Control System of Ship Electric Propulsion[J].Journal of Ordnance Equipment Engineering,2016(12):84-89.
TM343
A
2096-2304(2016)12-0084-06
修回日期:2016-10-15
猜你喜欢
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
科技信息·学术版(2021年7期)2021-01-10
煤矿机电(2020年5期)2020-11-02
课程教育研究·学法教法研究(2018年20期)2018-08-11
航空世界(2018年12期)2018-07-16