工厂化育秧技术的创新与研究
2017-01-06 01:47张国鹏杨永发王金峰
林业机械与木工设备 2017年1期
张国鹏, 杨永发, 王金峰, 雷 倩
(西南林业大学机械与交通学院,云南 昆明 650224)
工厂化育秧技术的创新与研究
张国鹏, 杨永发, 王金峰, 雷 倩
(西南林业大学机械与交通学院,云南 昆明 650224)
基于云南地区的特殊地形地貌及工厂化育秧的农艺要求,设计了一款适用性较强的工厂化育秧设备,对设备的可靠性进行了理论计算,分析了播种轴的排种条件,实现了育秧和行走的同步。运用Solidworks软件对各组件进行了虚拟装配及运动学仿真分析,分别研究了设备运行过程中的铺土、播种及覆土条件。样机在云南地区进行了田间试验,对整套设备的可靠性进行了评估及测量。
工厂化育秧;播种轴;SolidWorks;试验
目前农业生产中,高效率、机械化的生产模式已成为主流。工厂化育秧技术是在工业化进程中出现的一项高度机械化、自动化和集约化的先进农业技术,可大大提高农业生产率与土地利用率,但在一些类似云南地区的特殊地形地貌作业环境中,高度机械化的工厂化设备由于占地面积大、投资大及生产效率低等不适合当地的农业生产要求。我国对工厂化育秧设备的研制始于20世纪70~80年代,当时国内的播种方式主要以机械式为主,如2ZBZ-600型水稻穴盘育秧流水线等[1],90年代后期开始对钵体育秧技术进行研究,如2QB-330型气吸振动式秧盘精量播种机等[2],使工厂化育秧技术更加贴近真实育秧环境,大大提高了育秧效率。本研究参考大量国内外相关文献后,设计出一套适应于云南地区特殊地理环境的工厂化育秧设备。该设备通过对播种轴的更换,可实现对多种作物的工厂化育秧,大大降低了劳动强度,提高了生产效率和土地利用率。
1 工厂化育秧技术农艺要求
工厂化育秧流程一般分为播前准备、播种过程、田间摊铺等,工艺流程如图1所示。
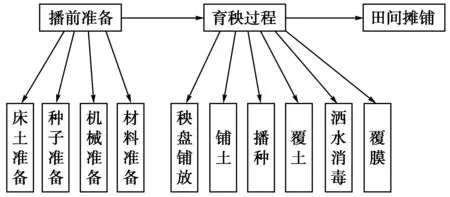
图1 工厂化育秧工艺流程
经试验测得农艺参数如下:床土(即营养土)一般为中性偏酸,pH值在5.4~7之间,种子要根据土壤环境选择适合当地栽培的优良品种,发芽率要大于95%,并做好浸种、消毒和催芽等前期工作[3],秧盘铺土厚度15~20 mm,覆土厚度3~6 mm[4]。
2 育秧机工作原理及结构设计
2.1 育秧机工作原理
工厂化育秧机示意图如图2所示。
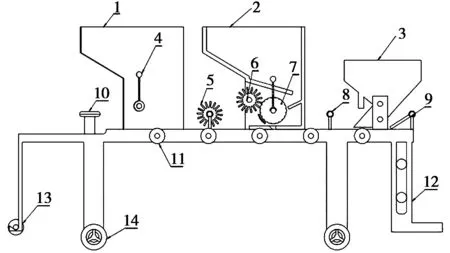
图2 工厂化育秧机示意图1.铺土料斗;2.播种料斗;3.覆土料斗;4.拨叉;5.滚刷;6.毛刷轮;7.播种轮;8.洒水装置;9.刮土板;10.行走转向系统;11.输送滚轮;12.秧盘垂直输送系统;13.覆膜轮;14.行走轮
作业时,外置发动机提供作业动力,秧盘由人工放入输入轨道,并被输送滚轮输送到铺土料斗下方,通过转动拨叉调节流量大小。秧盘通过料斗下方后便完成铺土过程;再由输送滚轮将秧盘输送到播种料斗下方,种子在重力的作用下落入到播种轴中,多余的种子则在转动过程中被毛刷轮滤掉,播种轴中的种子由料斗出口均匀落入秧盘中,完成播种过程;秧盘继续被输送到洒水消毒装置下方,开始对秧盘进行洒水消毒工序,输送滚轮将秧盘输送到覆土料斗下方后,靠重力下落的营养土由料斗出口覆盖在种子上面,然后由刮土板对秧盘中多余的营养土进行刮除,再由垂直升降系统将秧盘摊铺在田间,最后由覆膜轮对秧盘进行覆膜,以保证营养土的温度和湿度,至此即完成单个秧盘的育秧工序。
2.2 育秧机关键参数选取
2.2.1 动力源选取
本设计的育秧作业机具要求有自己的动力源,以提供输送秧盘和行走的动力,而且空间有限,因此要求质量轻、体积小,工作中振动及噪声要小。功率计算公式如下:
式中:N为机具工作时所需的功率(kW);m为机具满载质量(kg);g为重力加速度(m/s2);v为工作速度(m/s);f为滚动阻力系数,在此取0.2;η为传动效率系数。
经计算可得,当机具工作时满载质量为3 500kg、工作速度为0.2m/s、工作效率最高时动力至少为6kW,因此根据设计要求选用最大功率大于(或等于)6kW的汽油发动机来为机具提供动力。
2.2.2 播种作业条件
播种料斗中的种子在料斗箱中由于自身重力引起流体运动,落下的种子能否顺利进入播种轴中是排种成功的关键。种子若不能顺利落入将出现排种不均现象。播种料斗箱中的种子粒体流动示意图如图3所示。

图3 种子粒体流动示意图
当种子粒体从料斗箱的出口流出时,1区的种子首先自由降落,紧接着2区的种子补充1区,3区的种子从两侧顺着5区向下方滑动补充2区,最后是4区的种子向中心区滑动,运动相对缓慢,料斗箱中的种子以此规律连续运动[5-7]。
种子在料斗出口流出时会形成类似“拱桥”的形状,“拱桥”的高度决定了种子流出时的速度。由动态落粒拱理论可知,种子流出时的速度为:
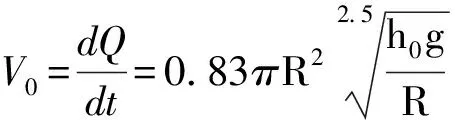
播种时排种成功的必要条件为:
V转=V0
式中:V转为播种轴的转速。
2.2.3 播种轴受力分析
播种轴在作业过程中由发动机为其提供动力自转,将落下的种子接入排种槽中,到达料斗出口处时依靠种子重力将种子播种到移动的秧盘中,为保证工作的可靠性需对其进行受力分析,如图4所示。

图4 播种轴受力分析
由理论力学可知该播种轴的力平衡方程分别为:
∑Fy=0 Fr1+Fr2-P1-P2=0
∑My=0 M3+M3=0
∑MB=0 P1(L1+L2+L3)+P2L3-Fr1(L2+L3)=0
根据以上各式可计算出所需参数,对播种轴进行结构设计。
3 育秧机田间试验分析


表1 铺土厚度 mm

表2 播种量 g
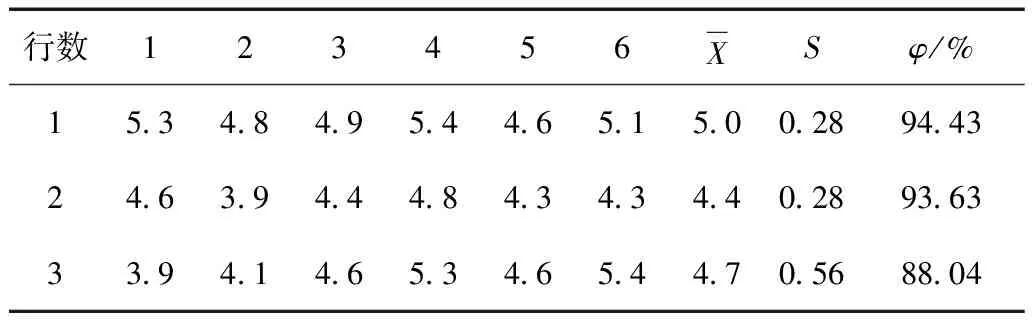
表3 覆土厚度 mm
这里的测量方式为直接测量,因此所测得的播种量为播种后的秧盘总重量,要得到实际的播种量还需减去播种前的秧盘总重量。
计算各表中测量结果平均值的极差为:18.0-17.6=0.4,125.9-125.6=0.3,5.0-4.4=0.6。
极差计算结果较小且各工序运行中稳定系数较高,说明该设备在作业过程中运行稳定,可靠性强,与传统的育秧设备相比,性能得到了显著提高,各工序均接近农艺要求,作业质量也得到了很大提高。
4 结论
(1)种子在秧盘内能否播种均匀是工厂化育秧设备能否高效的关键因素。大量生产试验表明,当种子的流出速度接近播种轴的速度时即可达到较高的作业效率。
(2)工厂化育秧在生产过程中必须根据农艺要求严格作业,才能使机械设备结合农艺要求在整个育秧过程中发挥最大作用。
(3)要尽可能地保证育秧过程中对秧盘铺土量、覆土量和播种量的精确控制。
(4)在实际生产中,要根据育秧环境对设备的机械装置部分进行适应性调整,以提高育秧效率。
[1] 王立臣,刘小伟,魏文军,等.2ZBZ-600型水稻播种设备的试验与应用[J].农机化研究,2000(1):70-72.
[2] 邱兵,张建军,陈忠慧.气吸振动式秧盘精播机振动部件的改进设计[J].农机化研究,2002(2):66-67.
[3] 吴介中.水稻盘育秧机械化流水线播种技术要点[J].江苏农机化,2009(2).
[4] 孟元元.自走式水稻育秧联合作业机的设计与研制[D].银川:宁夏大学,2014.
[5] 朱琳.组合式工厂化育秧机设计与研究[D].合肥:安徽农业大学,2014.
[6] 樊廷栋,王超,杜旭,等.智能化集中浸种催芽系统的组态优化设计[J].林业机械与木工设备,2016,44(11):38-42.
[7] 徐凯宏,张秀明.基于Android的林区寒地灌溉监控系统研究[J].森林工程,2015,31(3):90-93+100.
(责任编辑 张雅芳)
Innovation and Research on Factory Seedling Technology
ZHANG Guo-peng, YANG Yong-fa, WANG Jin-feng, LEI Qian
(School of Transportation and Machinery Engineering,Southwest Forestry University,Kunming Yunnan 650224,China)
Based on the special topography in Yunnan region and the agricultural requirements of factory seedlings,a kind of factory seedling equipment with strong adaptability is designed,theoretical calculation of the reliability of the equipment is realized and the seed sowing conditions of the seed sowing shaft is analyzed,realizing the synchronous operation of the seedling process and the walking process.Solidworks software is used to conduct virtual assembly and motion simulation analysis of each component,and the soil paving,seed sowing and overburden conditions are studied respectively.The field test of the prototype is performed in Yunnan,with the reliability of whole set of equipment evaluated and measured.
factory seedlings;sowing shaft;SolidWorks;experiment
2016-09-02
西南林业大学科技创新基金项目
张国鹏(1992-),男,山西运城人,硕士,主要研究方向为机械制造及其自动化,E-mail:807361664@qq.com。
S642.2
A
2095-2953(2017)01-0023-03
猜你喜欢
江苏农业科学(2021年10期)2021-07-01
江西农业大学学报(2020年6期)2021-01-08
当代水产(2019年2期)2019-05-16
新农民(2019年36期)2019-02-20
农业机械学报(2018年6期)2018-07-05
现代园艺(2018年1期)2018-03-15
农业科技与装备(2018年6期)2018-03-15
中国公路(2017年15期)2017-10-16
农业知识(2017年9期)2017-04-10
现代农业(2015年5期)2015-02-28