
传动间隙对汽车驾驶性的影响规律研究
2017-01-06 10:15姜丹娜郝东浩
振动与冲击 2016年24期
姜丹娜, 黄 英, 郝东浩
(北京理工大学 机械与车辆学院,北京 100081)
传动间隙对汽车驾驶性的影响规律研究
姜丹娜, 黄 英, 郝东浩
(北京理工大学 机械与车辆学院,北京 100081)
汽车驾驶性的提高是汽车品质提升的一个关键因素,间隙是传动系统中必然存在且对驾驶性存在影响的因素,所以研究间隙对驾驶性的影响规律是非常有必要的。通过建立车辆纵向的低频动力学模型仿真典型驾驶性恶劣工况——Tip-in工况来研究间隙对驾驶性的影响规律。包括不同位置和不同大小的间隙对驾驶性的影响,分析在面向控制的建模时对模型的简化需要注意的问题。进一步的研究了当车辆传动系统存在较大间隙时,采用经典的转矩斜率控制的方法来改善驾驶性时出现的问题。并针对这一问题设计了基于冲击最小的闭环控制器,使汽车驾驶性得到了改善。
传动间隙;汽车驾驶性;间隙的位置;间隙的大小;驾驶性控制
现代汽车需要车辆对驾驶员的操作有快速的响应特性和良好的舒适性。这些属性被定义为汽车的驾驶性。驾驶性是指从驾驶员的角度对车辆的动态特性评价的主观术语,通常采用驾驶经验丰富的司机在特定车辆工况下的主观感受来进行评价。这些特定工况主要包括发动机怠速,起步,加速,巡航(低速,高速),急加/减速,换挡,发动机启停等[1]。具有电子燃油喷射系统的发动机对驾驶员的请求响应非常迅速,但是这也激发了传动系统的扭振,从而导致驾驶性恶化。因此,当驾驶员需求转矩被执行时需要考虑传动系统的动力学行为。
对发动机快速转矩传递的动力学现象被广泛的归结为“Shunt”和“Shuffle”现象。Tip-in/out工况被定义为驾驶员急踩/松油门踏板,发动机转矩经过传动系统作用到车身上,因为有间隙和传动轴弹性的作用,会导致“Shunt”或者叫做“Clonk”的现象[2]。随后在传动系统欠阻尼时会发生“Shuffle”现象,国内被翻译成窜振[3]或者纵向振动[4]。图1显示了能够反映这种现象的实车数据示例[5]。
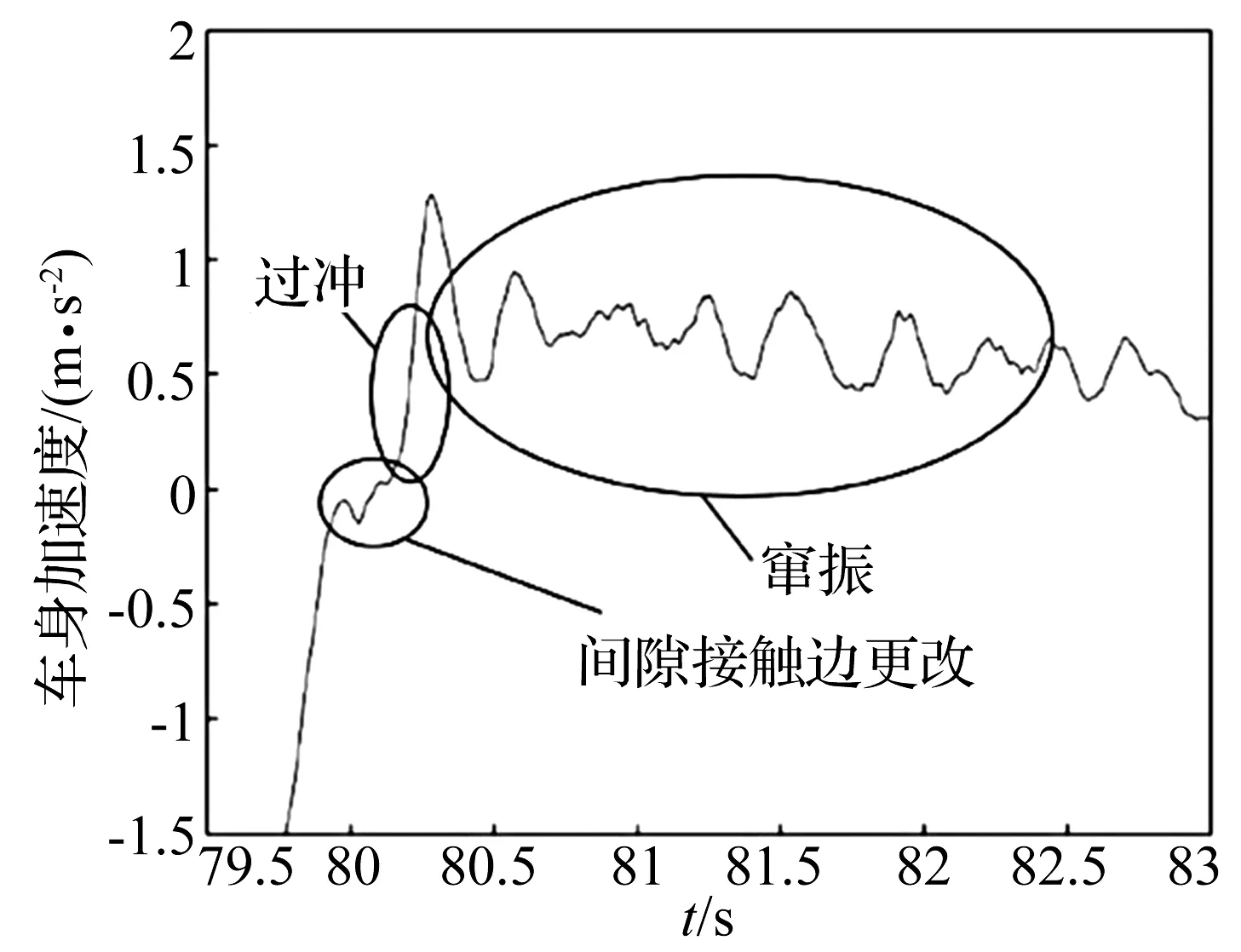
图1 Tip-in工况下车身的加速度曲线Fig.1 Vehicle body acceleration in Tip-in condition
间隙是传动系统必然存在的现象,而且随着车辆的使用和磨损,间隙会越来越大,并且对驾驶性带来极大的危害[6]。为了对存在间隙的传动系统提高驾驶性,很多学者进行了很多基于模型的控制研究[7-8],但对于如何进行面向控制间隙的驾驶性提高,并没有统一的建模认识。同时常规的面向驾驶性提高采用的方法是开环的转矩斜率控制方法,这种方法在面向有间隙较大的传动系统时是否依然有效也值得探讨。基于此目的,本文建立了基于Simulink的低频车辆动力学模型,仿真驾驶性恶劣的工况如Tip-in/out工况下的车辆运动学特性,研究间隙的位置和大小对车辆驾驶性的影响规律,总结面向控制的建模规律。并进一步的,针对存在间隙的传动系统的驾驶性控制,研究了典型控制算法存在的问题,并设计了基于冲击最小的闭环控制器,使汽车驾驶性得到了改善。
1 带有间隙的车辆动力学建模
本文研究传动间隙对驾驶性的影响,所以选择了特定的工况进行仿真。而由于评价本身是主观的,如何选择评价的指标,本文参考了人体对振动的敏感度进行了选择。ISO 2631-1:1997(E)《人体承受全身振动评价》[9]是公认的机械振动对人体影响的评价方法,此标准指出横向、纵向和垂向三个方向的线振动对人体最为敏感,而水平方向(包含纵向和横向)的比垂向更加敏感。又因为Tip-in/out工况对纵向的影响要远大于横向,因此在本研究中,采用车辆纵向加速度作为驾驶性的评价指标,而对影响车辆横向和垂向的动态特性将不予考虑。因为受传动系统激发的车辆纵向低频振动频率通常在10 Hz以下,而该频率段范围的振动正好是驾驶员(人体)各器官的敏感范围[10],因此,本研究中所建立的车辆动力学模型将只考虑车辆的纵向低频动力学特性,而中高频的特性将不予考虑。
本文所研究的车辆为一辆五档手动变速箱前轮驱动的车辆,参考车型见文献[11] 。建立的动力学模型包含两个部分:传动部分和车辆动力学部分,其中传动部分包含整个动力传动系统,车辆动力学部分仅包含纵向的动力学。两部分模型通过轮胎耦合在一起。因为整个动力传动系统多个位置存在间隙,如变速箱,主减速器,差速器,花键,万向节等,文献[12]实验测量出整个动力传动系统有8°的角间隙。本文假设间隙出现在两个位置,即变速箱和差速器,为了简化计算,其他位置的间隙假设为零。
1.1 动力传动系统建模
整个动力传动系统结构如下图2所示,包括发动机(图中用e表示),离合器(图中用cd表示),变速箱(图中用g1,g2表示一对啮合的齿轮),主减速器(图中用df表示),驱动半轴(图中用hs表示),以及轮胎(图中用w表示)。图中符号下标f,r分别表示前后,下标L,R分别表示左右,ϑ表示转角,不同的部件用表示不同部件的下标表示。在本文中仅考虑固定档下的车辆低频动力学特性,且假设离合器完全结合。
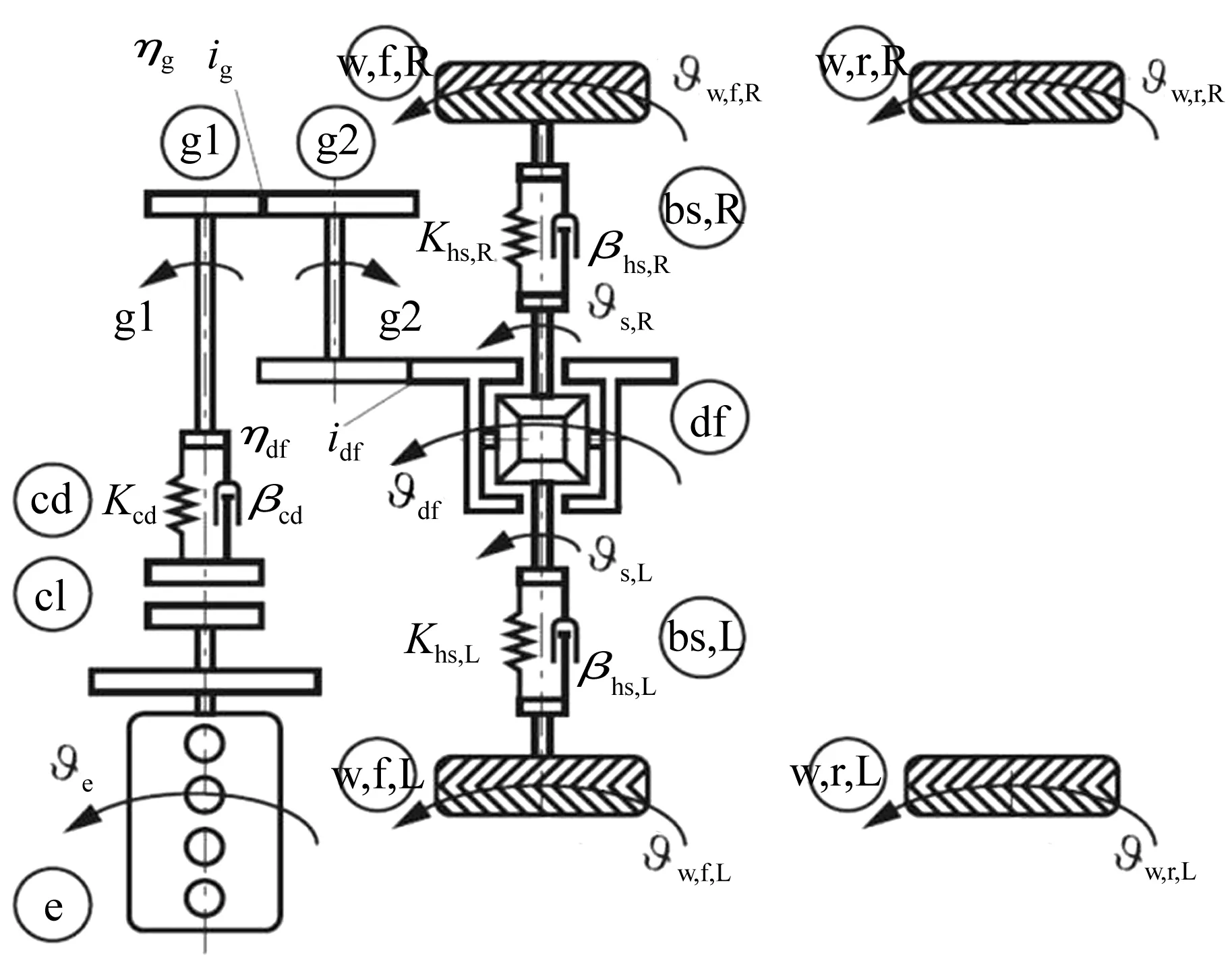
图2 传动系统部件组成示意图Fig.2 Vehicle driveline layout
Te为发动机实际输出转矩,Tcd为离合器转矩(包含离合器及扭转减震器),Je为发动机飞轮转动惯量。发动机飞轮端的满足动力学方程(1)
(1)
由于仿真过程不考虑换挡,所以不考虑离合器的分离和结合过程,始终处于结合状态。由于离合器扭转减振器的存在,离合器与齿轮箱之间用扭转弹簧和阻尼简化,同时考虑到齿轮的间隙,建立模型的动力学方程如式(2),设间隙角度为2α1
(2)
齿轮箱仅考虑一对啮合齿轮,其满足的运动学方程如式(3)、(4),将小齿轮的转动惯量折合到大齿轮中的动力学方程如式(5)
Tg=Tcdigηg
(3)
ϑg1=ϑg2ig
(4)
(5)
而主减速器与齿轮箱类似,有一对啮合齿轮,其满足的运动学方程如式(6)、(7)
Tdf=Tgidfηdf
(6)
ϑg2=ϑdfidf
(7)
忽略左右轮的差异,认为差速器等速输出,则左右两个半轴输出端转速相同,均为ϑdf。
左右两个半轴为弹性轴,可以等效为扭转弹簧和阻尼,同样考虑到间隙的影响,设间隙角度为2α2,其动力学方程如式(8)
(8)
驱动车轮的旋转动力学方程如式(9),其中Tr是轮胎的滚动阻力矩,Tt为轮胎与地面接触力矩。
(9)
而非驱动车轮的旋转动力学方程如式(10)
(10)
纵向轮胎力采用魔术轮胎公式[13]来计算,轮胎的纵向力用轮胎的垂直载荷,滑移率以及摩擦因数的函数表示,见式(11)。
Fx=μFzsin(Ctarctan([κt-
Et{Btκt-arctanBtκt}])
(11)
式中:κt为轮胎的滑移率,用式(12)表示,x为车辆在前进方向上的位移。
(12)
前后轮的轮胎与地面的接触转矩可以用式(13)、式(14)计算
Tt,f=Fx,fRw
(13)
Tt,r=Fx,rRw
(14)
1.2 车辆动力学建模
文献[14]中对比了包含悬架的车辆动力学模型和不包含悬架的车辆动力学模型,仿真了Tip-in工况,发现这两种模型对Tip-in/out工况下的仿真结果非常接近,因此悬架的垂向因素在该问题的分析中可以去除,仅考虑纵向的动力学特性。车辆模型简化为图3进行动力学分析,其动力学方程如式(15)~式(18),其中,Fd是指空气阻力,mg·sinβ为坡道阻力,Fx,f,Fx,r,Fz,f,Fz,r分别为前后轮的轮胎纵向力和垂向力,下标f和r分别为前后。n为前后轮的轮数,h为质心CG的高度,a,b分别为前后轮距离质心的距离,Vw为风速。

图3 车身受力分析Fig.3 Vehicle body force
(15)
(16)
(17)
(18)
将车辆动力传动系统和车辆动力学的建模原理采用Matlab/Simulink软件搭建,如图4所示,采用ode113s求解器,能够进行各种工况的仿真。车辆参数如表1所示。表中数据来源于文献[11] 。
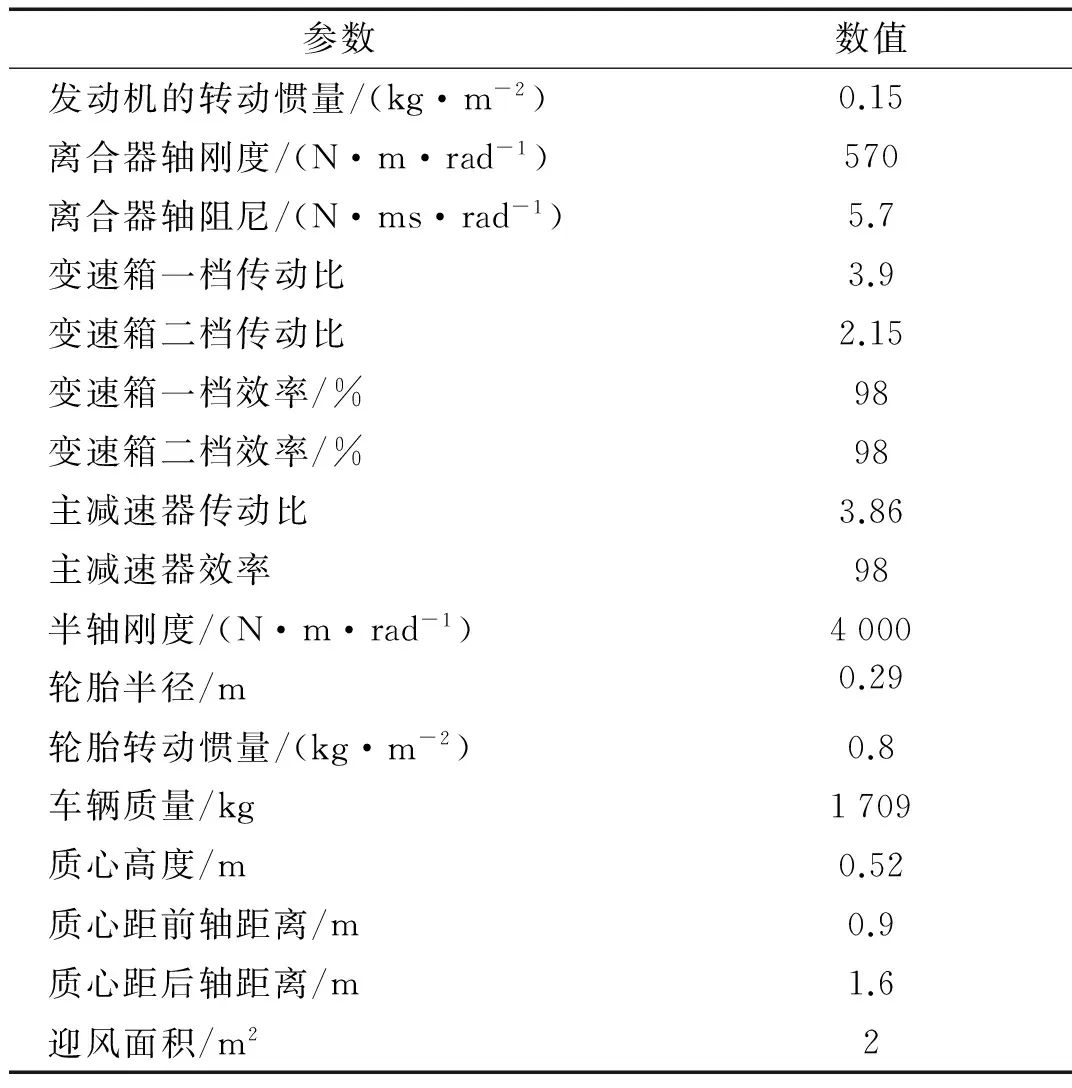
表1 车辆主要参数Tab.1 Parameters of the vehicle

图4 低频车辆动力学Simulink模型Fig.4 Low frequency vehicle dynamic Simulink model
发动机的转矩激励采用如文献[15] 的实际Tip-in工况的发动机转矩曲线(该文献所述车型与上文车型数据较为接近)。增加Tip-out时转矩瞬时下降到负转矩,这里假设松油门后0.1 s下降到负转矩,并假设各转速下摩擦转矩均为-10 N·m不变。发动机的激励转矩曲线如图5所示。仿真开始时设各间隙处于最大间隙位置。

图5 Tip-in/out工况下发动机转矩激励曲线Fig.5 Engine torque at Tip-in/out condition
2 不同间隙位置对车辆驾驶性的影响分析
图6(a)为Tip-in/out工况下,间隙集中在变速箱或差速器上,间隙大小为5°情况下车辆的加速度曲线,图6(b)显示的是该工况下间隙分别分布在变速箱和差速器上各2.5°和集中分布在变速箱或差速器上为5°情况下的加速度曲线,图6(c)为间隙分别分布在变速箱和差速器上各2.5°和集中分布在差速器上为2.5°情况下的加速度曲线。图中间隙1指的是变速箱处间隙,间隙2指的是差速器处间隙。
由图6(a)可知,间隙存在变速箱处时,相比无间隙的情况,加速度曲线幅值略有增加,几乎可以忽略,但间隙存在于差速器处时,加速度曲线比间隙存在于变速箱处时,存在明显的延迟,并且加速度的振动变得更加剧烈。这主要是因为差速器间隙的位置比变速器间
隙的位置相对车身负载来说更为接近。也就是说同样大小的间隙,越靠近传动链末端,对车辆驾驶性影响越大。
由图6(b)可知,在整个动力传动系统同样存在5°间隙的情况下,间隙集中在差速器上,间隙分布在差速器和变速器上和间隙集中在变速器上,整个系统的响应是不同的,间隙越向传动链后部集中,振动越剧烈,延迟也就越严重。同样也证明了不同位置的间隙并不能等效到一个位置,但由于变速箱处的间隙对系统响应影响不明显,在此处的间隙可忽略,如图中6(c)所示,忽略了变速箱处间隙的车辆加速度特性与不忽略变速箱处间隙的仿真结果非常接近。
从图6中各图的Tip-in和Tip-out过程对比中,可以发现,间隙的影响在Tip-out过程中更加明显。主要是因为Tip-in过程存在驱动力,间隙仅被穿越一次,而Tip-out过程失去了驱动力,扭振的作用使间隙被反复穿越,出现了多次加速中断现象。
由运动学方程可知,变速器处于传动的前端,在穿越变速器间隙时,系统的转动惯量为发动机的飞轮,而主减速器间隙位于传动末端,在穿越减速器间隙时,系统的转动惯量为整个动力传动系统,因此,穿越前端间隙的时间要少于穿越后端间隙的时间,因此,在系统延迟上看,变速器间隙的延迟影响小。在穿越了间隙之后,变速器间隙的作用使Tcd增加了一个大小为2α1Kcd的转矩,作用在变速器转动惯量的小惯量上,振动加剧并不严重,主减速器间隙的作用使Ths增加了一个大小为2α2Khs的转矩,作用在车辆这一大惯量上,振动加剧非常明显。因此在面向间隙问题的控制建模时可仅考虑最接近车轮处的差速器间隙。
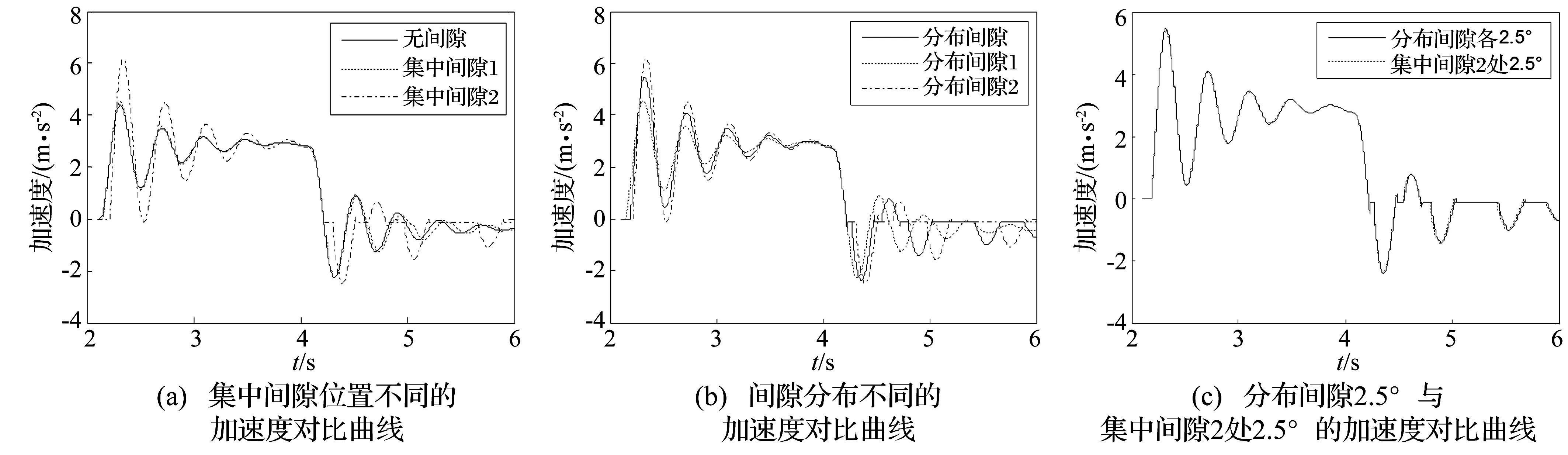
图6 间隙位置对车辆驾驶性的影响Fig.6 Influence of gap position to drivability
3 不同间隙大小对车辆驾驶性的影响分析
针对典型工况Tip-in/out展开仿真,分别设置差速器间隙为0,2.5°,5°,10°进行仿真,仿真结果如图7,由图7(a)可知,随着间隙的增大,系统延迟增大,系统加速度的波动也更加剧烈。但当间隙进一步增大,如增大到10°时,加速度波动的频率发生了比较大的变化,而且当加速度上升到一定值后开始迅速下降,这主要是因为冲击的作用导致了轮胎发生了滑移率增大,也就是轮胎打滑造成了驱动力的迅速下降。图7(b)为各种间隙情况下的滑移率曲线,在10°间隙时,滑移率剧增,车轮失去附着,车辆加速度急剧减小。可见随着间隙的增大不仅会使驾驶性变得恶劣,同时也会带来驱动滑移等安全性问题。

图7 间隙大小对车辆驾驶性的影响Fig.7 Influence of gap size to drivability
4 间隙存在对车辆驾驶性控制的影响分析
针对车辆在前后方向上低频的振动现象,由于会带给乘员不舒服的感觉,所以需要对其进行控制,通常采用的方法是根据动力传动系统第一阶扭振的固有频率计算发动机转矩的上升时间,使发动机转矩的上升时间满足T为固有周期的整数倍[16]。在本文的车辆动力传动系统的固有频率约为2.5 Hz(使用仿真曲线连续三个周期频率的平均值),设置发动机的转矩斜率不超过250 N·m/s。如图8所示,将原发动机转矩调整后如图8(a),无间隙情况下的车辆驾驶性得到了较好的改善如图8(b)。
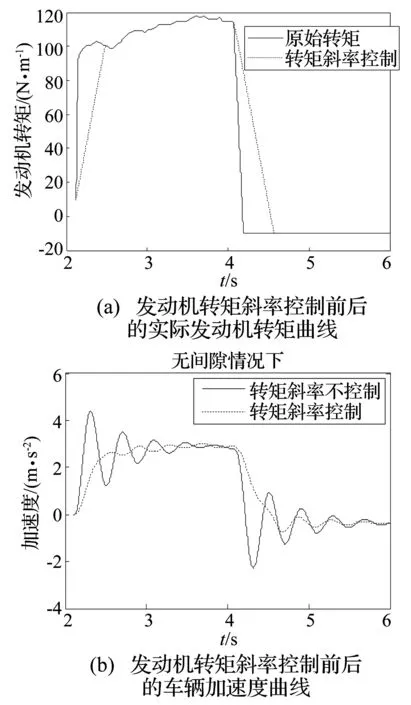
图8 无间隙情况下的转矩斜率控制对驾驶性的改善Fig.8 Using torque slope control to improve drivability when no gap in driveline
但如果系统存在,同样的发动机转矩斜率控制并不能取得较好的效果,如图9所示,这种控制方法虽然一定程度上改善了加速度的波动,但控制效果并不理想,控制后仍有较大的加速度波动,并且系统延迟变得更加严重,这是因为变缓的发动机转矩在穿越间隙时花费的时间更长了。所以在系统存在间隙的情况下,转矩斜率控制的方法并不非常适用。
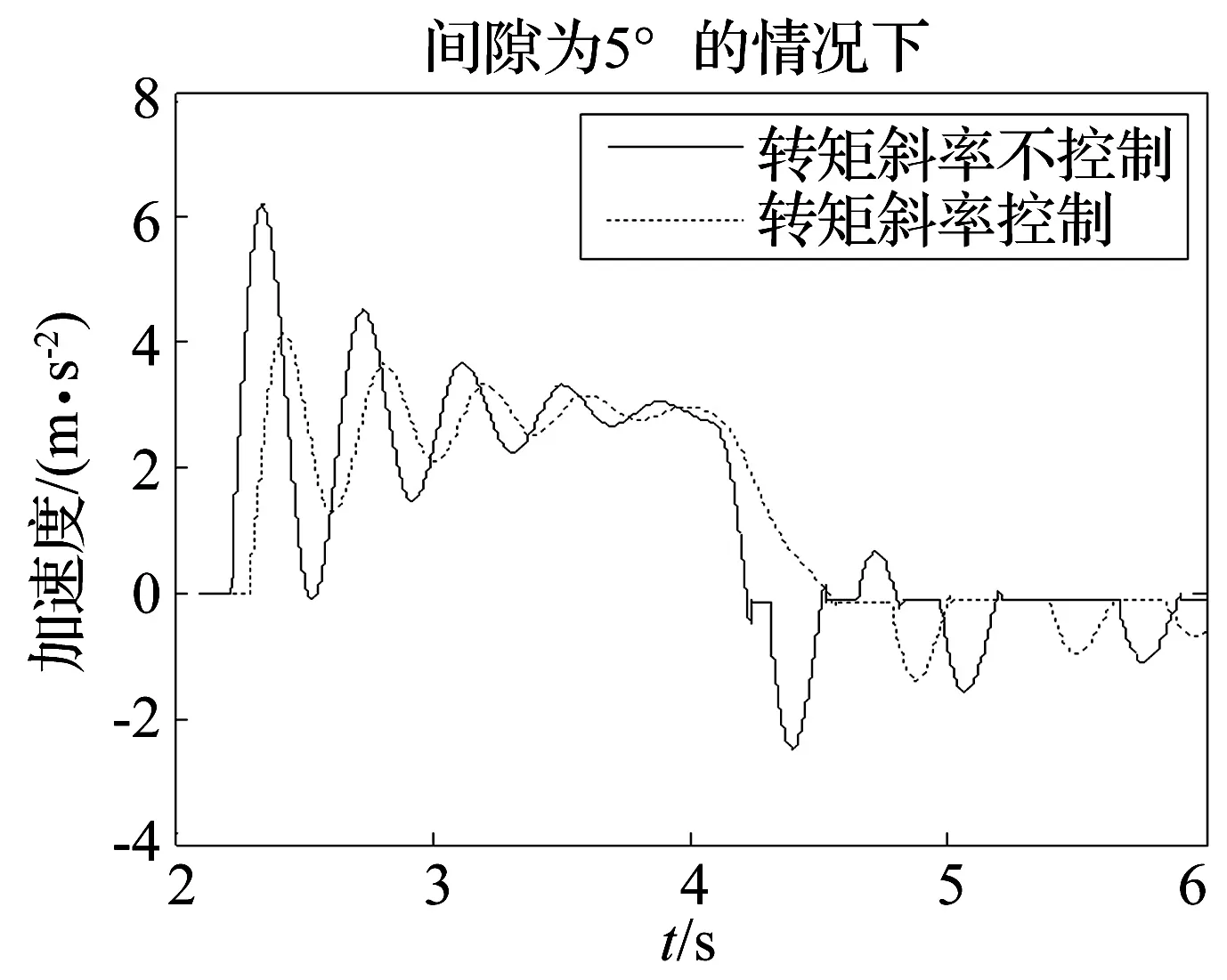
图9 有间隙情况下的转矩斜率控制对驾驶性的改善Fig.9 Using torque slope control to improve drivability when there is gap in driveline
针对这种情况,本文设计了一种基于加速度冲击的反馈PID控制,控制框架如图10所示,将车辆的加速度进行微分处理得到车辆的冲击度,将冲击度作为控制目标设计PID闭环控制器,并将得到的转矩补偿到需求转矩中,再对实际车辆的发动机进行控制,从而得到实际的需求转矩。控制效果如图11所示。显然闭环控制的效果比发动机转矩斜率控制效果要好。

图10 基于冲击反馈控制的控制框架Fig.10 Control frame using feedback control algorithm based on impulse

图11 有间隙下冲击控制和转矩斜率控制效果对比Fig.11 Comparation of control effects between two control strategies
5 结 论
通过建立车辆纵向低频动力学模型,仿真研究了动力传动系统间隙对车辆驾驶性以及控制规律的影响,得到了如下的结论:
(1)动力传动系统间隙的位置不同,对车辆驾驶性的影响也不同,越靠近传动末端,对加速度的波动影响越大,延迟越严重。整个动力传动系统的间隙不能等效到一处进行建模,做简化处理时可仅考虑最末端的间隙。
(2)动力传动系统同一位置的间隙越大,在Tip-in/out工况下车辆的加速度波动也就越大,系统延迟也就越严重,驾驶性越差,磨损更严重时,即间隙更大时,会使轮胎产生滑移现象,对系统安全性也有很大的危害。
(3)在有间隙的情况下,采用传统的转矩斜率控制方法并不能很好的改善加速度的波动,还带来延迟更严重的情况,探讨采用冲击反馈的方法解决间隙造成的加速度波动,改善主动控制的效果。
[1] LIST H, SCHOEGGL P. Objective evaluation of vehicle driveability[C]// International Congress & Exposition.SAE 980204.
[2] MO C Y,BEAUMOUNT A J,POWELL N N. Active control of drivability [C]//International Congress & Exposition. SAE 960046.
[3] 李进, 欧阳明高. 电控柴油机动力系统窜振控制策略研究[J]. 汽车工程, 2006, 28(3): 238-241. LI Jin,OUYANG Minggao. A study on surge control strategy for diesel powertrain[J]. Automotive Engineering, 2006,28(3): 238-241.
[4] MITSCHKE M. WALLENTOWITZ H.汽车动力学[M]. 陈三荫,译. 北京:清华大学出版社, 2009.
[5] KARLSSON J. Powertrain modeling and control for driveability in rapid transients[D]. Sweden: Chalmers University of Technology Goteborg, 2001.
[6] MENDAY M T, RAHNEJAT H, EBRAHIMI M. Clonk: an onomatopoeic response in torsional impact of automotive drivelines[J]. Journal of Automobile Engineering, 1999, 213(4):349-357.
[7] TEMPLIN P, EGARDT B. A powertrain LQR-torque compensator with backlash handling[J]. Oil & Gas Science and Technology-Revue d’IFP Energies Nouvelles, 2011, 66(4): 645-654.

[9] Mechanical vibration and shock-evaluation of human exposure to whole-body vibration-part 1: general requirement:ISO 2631-1:1997(E)[S].
[10] GRIFFIN M J. Handbook of human vibration [M]. Cambridge, MA: Academic Press, 2012.
[11] SORNIOTTI A. Driveline modeling, experimental validation and evaluation of the influence of the different parameters on the overall system dynamics[C]//SAE World Congress & Exhibition.SAE 2008-01-0632.
[12] KRENZ R A. Vehicle response to throttle Tip-in/Tip-out[C]//SAE Surface Vehicle Noise and Vibration Conference.SAE 850967.
[13] PACEJKA H. Tire and vehicle dynamics[M]. Amsterdam: Elsevier, 2005.
[14] GALVAGNO E, MORINA D, SORNIOTTI A, et al. Drivability analysis of through-the-road-parallel hybrid vehicles[J]. Meccanica, 2013, 48(2): 351-366.
[15] HOLDSTOCK T, SORNIOTTI A, SURYANTO N A, et al. Linear and non-linear methods to analyse the drivability of a through-the-road parallel hybrid electric vehicle[J]. International Journal of Powertrains, 2013, 2(1):52-77.
[16] FAN J. Theoretische und experimentelle untersuchungen zu langsschwingungen von pkw(ruckeln)[M]. Aachen:Verlag Shaker, 1994.
A study of the driveline gap influence on vehicle drivability
JIANG Danna, HUANG Ying, HAO Donghao
(School of Mechanical Engineering, Beijing Institute of Technology, Beijing 100081, China)
Drivability is a key factor to the quality of a car. The gap is an inevitable factor in driveline which has influence on drivability. It is thus necessary to study the influence of the gap on drivability. By setting up a low-frequency longitudinal vehicle dynamics model to simulate the tip-in drive condition with bad drivability, the influence of the gap on the car’s drivability was studied. It included the impact of clearance gaps at different locations and different gap sizes on drivability. Some useful rules to control-oriented modeling were obtained. The methods of classical ‘torque slope control’ to improve drivability were applied to further study the problem when the vehicle has a big gap. In order to solve this problem, a closed-loop controller was designed and the car’s drivability was improved.
driveline gap; vehicle drivability; position of the gap; size of the gap; drivability control
国家自然科学基金(51475043)
2015-06-30 修改稿收到日期:2015-11-24
姜丹娜 女,博士生,1979年12月生
黄英 女,博士,教授,博士生导师,1967年2月生
U462.3; U463.2
A
10.13465/j.cnki.jvs.2016.24.025
猜你喜欢
中国造纸(2022年8期)2022-11-24
青少年科技博览(中学版)(2022年1期)2022-03-28
一重技术(2021年5期)2022-01-18
装备制造技术(2020年11期)2021-01-26
装备制造技术(2020年12期)2020-05-22
北京汽车(2018年4期)2018-09-08
电子制作(2018年10期)2018-08-04
车迷(2017年12期)2018-01-18
人间(2015年8期)2016-01-09
汽车实用技术(2015年8期)2015-12-26
