利用TRIZ理论对饲料包装袋套袋机开袋装置进行优化设计
2017-01-05 01:57邓援超周
饲料工业 2017年17期
■董 阳 邓援超周 杨 张 立
(湖北工业大学,湖北武汉 430068)
1 TRIZ概述
TRIZ是由前苏联根里奇·阿奇舒勒(G.S.Alt⁃shuller)提出,自1946年开始探究的一套具有普遍适用性的发明问题解决理论,它能帮助我们发现问题并找到解决问题的方法,实现产品的快速创新和优化[1]。TRIZ理论有一套标准的找到解决问题方案的流程,包括以下4步:①对待解决的实际问题作详尽的分析并清楚地定义该问题;②将该问题转化为TRIZ中的某种通用问题模型;③利用TRIZ工具得到TRIZ提供的通用形式的解;④把TRIZ通用形式的解具体化为针对该实际问题的具体的解。
自1990年开始,TRIZ理论进入中国,首先主要被机械、电子、生物、化工等技术领域的研究人员重视,随着对其研究的逐渐深入,TRIZ理论被引入到了管理、创新教育等非技术领域,在企业和科研机构的应用范围与推广力度也越来越大。很多学者做了相关的研究和探讨。平恩顺等[2]将TRIZ理论应用于新产品的开发,建立了机械产品突破性创新设想产生过程模型,以期在机械产品突破性创新方面进行一些前期探索。徐起贺等[3]阐述了TRIZ理论中各项工具方法在机械产品创新设计研究中的应用,并展望了随TRIZ方法学的不断推广与应用深化,人类技术创新过程必将更快更新。黄蕾等[4]则是将TRIZ理论应用到具体的饲料机械工程实际问题当中,解决了袋装饲料智能装车机安装厂房高度受限问题。
本文将TRIZ理论应用于饲料包装袋套袋机的开袋装置中,对该装置进行了问题描述、问题分析,并运用合适的TRIZ理论方法及工具提出该问题的解决方案模型,最终转化为实施方案。
2 饲料包装袋和饲料包装袋套袋机介绍
2.1 饲料包装袋及开袋装置介绍
现在工业上饲料的包装大都采用覆膜包装袋(见图1),但由于一些饲料产品对包装密封性要求高,通常会采用较高档的双层包装袋(见图2),这种双层包装袋包括外部的编织袋(以下称外袋)以及其内部套的一层塑料薄膜袋(以下称内袋)。

图1 覆膜包装袋

图2 双层包装袋
双层包装袋在使用前需要套在一起,即将内袋套入外袋中,目前双层包装袋套袋动作由人工完成,劳动强度大,随着经济快速发展,现研发出适用于双层袋的饲料包装袋套袋机(见图3)来代替人工,其生产流程如图4所示,箭头方向代表生产工艺流程走向。
其中,要完成套袋动作,先必须将外袋打开,再将内袋套进去,所以外袋开袋装置是将内袋套入外袋不可缺少的部分,其结构见图5。

图3 饲料包装袋套袋机
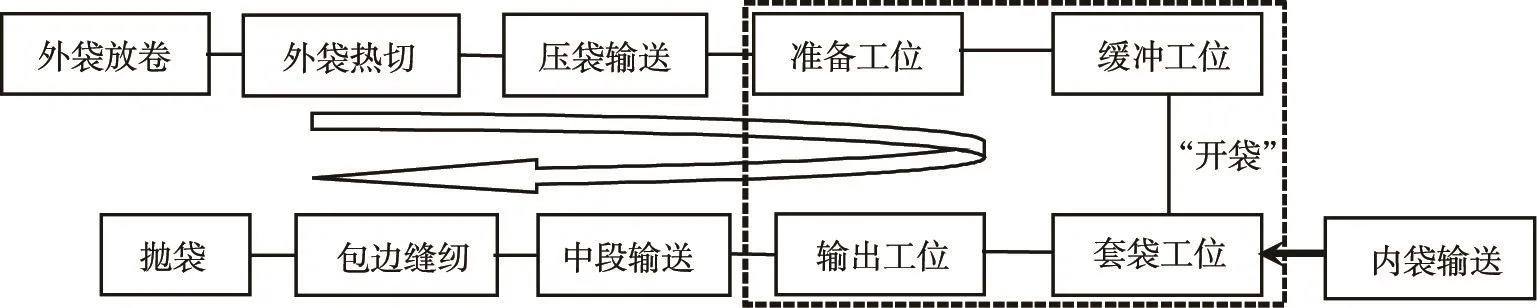
图4 饲料包装袋套袋机生产流程
各关键部套按如图6(a)~6(c)的顺序执行套袋动作。过程如下:上吸盘下降吸气将外袋吸住、上升、打开外袋,见图6(a);拉内袋机械手伸出,夹住内袋,见图6(b);拉内袋机械手收回,将内袋套入外袋中,见图6(c)。
2.2 问题描述
图5中的开袋上吸盘包含左侧开袋上吸盘、中间开袋上吸盘、右侧开袋上吸盘,这三个开袋上吸盘初始状态是等高的且同时动作,其工作流程如图7所示。
在实验样机调试过程中我们发现开袋装置在打开外袋后,由于外带长度在800~1 000 mm之间,长度较长,加上编织袋很软,所以上表面形成不平整弧面,外袋左、中吸盘以及中、右吸盘之间部分会下坠,如图8所示。

图5 外袋开袋装置
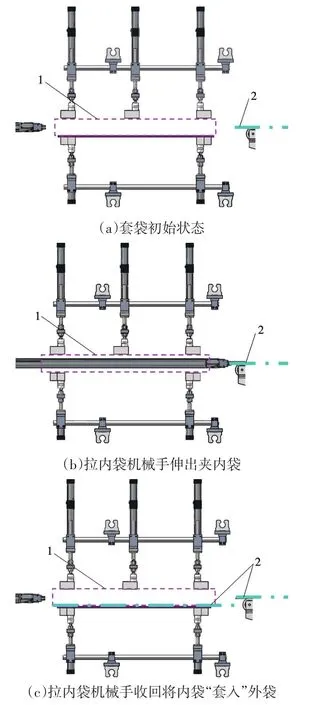
图6 套袋工位各关键部套的工作示意图
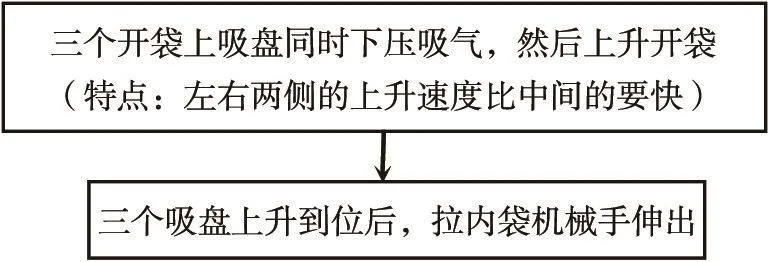
图7 开袋上吸盘工作流程图

图8 外袋下坠部分示意图
当出现开袋上吸盘中间的外袋下坠较严重时会导致拉内袋机械手在伸出过程中戳到外袋,将外袋戳掉,不能实现套袋,在这之后的工序都无法实现正常进行。
综合上述分析,问题可描述为:打开的外袋上表面下坠。
3 问题分析
3.1 系统功能组件分析
组件列表可以回答系统是由哪些组件组成,包括系统作用对象、技术系统组件、子系统组件,以及和系统组件发生相互作用的超系统组件。超系统组件有:机架、进内袋装置、拉内袋机械手、内袋;系统组件有:上吸盘托架、下吸盘托架、升降装置、左侧开袋上吸盘、中间开袋上吸盘、右侧开袋上吸盘、右侧开袋下吸盘、左侧开袋下吸盘;作用对象为:外袋。功能分析如图9所示。
3.2 因果链分析
通过对问题进行因果分析可以帮助梳理逻辑关系,找到解决问题的更多突破口。针对问题描述,对当前系统进行因果分析,得图10的因果链分析图。
4 提出解决问题方案模型

图9 功能组件分析
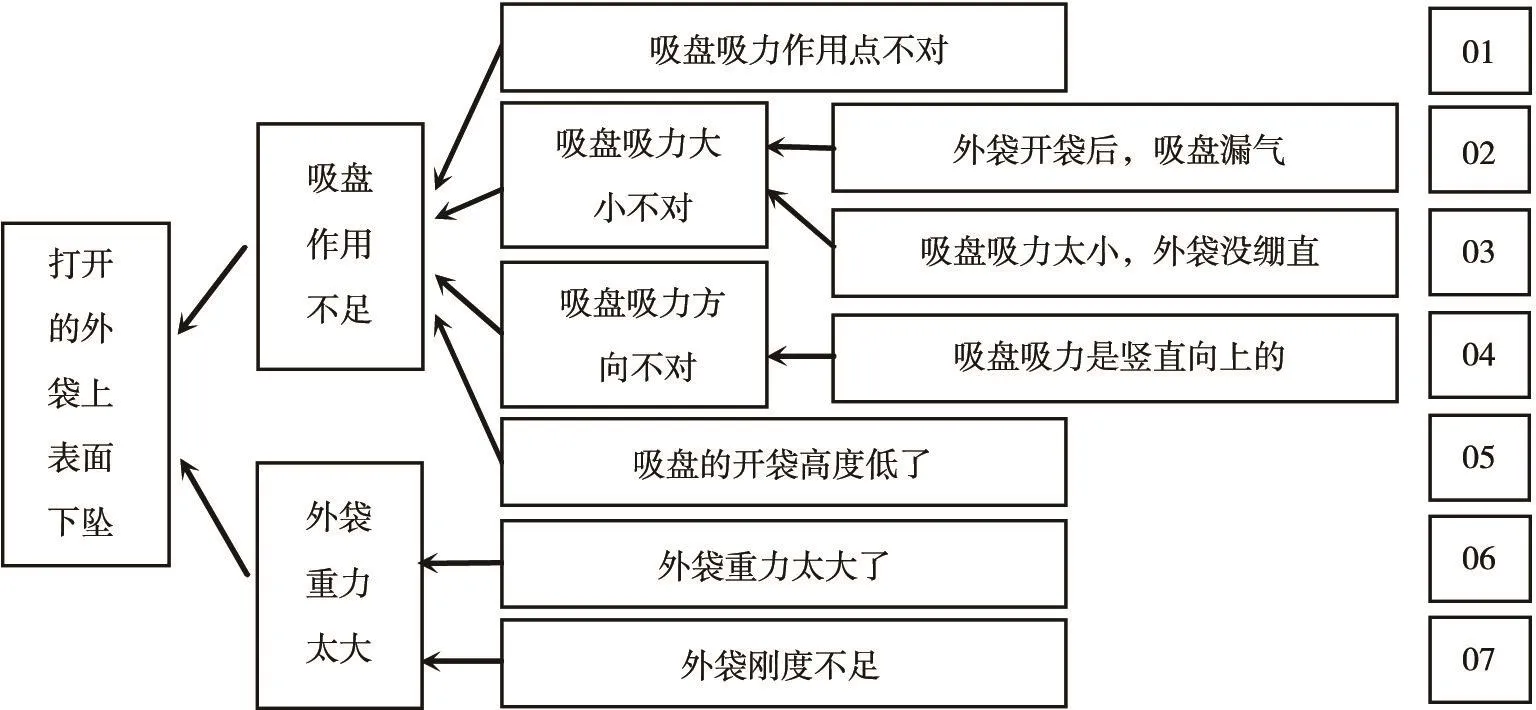
图10 因果链分析
对上述因果分析结果进行探讨和实验研究。针对功能组件分析,系统本身存在不足的作用;由于现实验样机上所确定的吸盘吸力作用点是通过实验确定的,故01号原因不是关键缺点;针对02号原因进行实验,测得外袋开袋后,吸盘的真空度值保持在-18.7 kPa,并无漏气情况;06号和07号原因所描述的内容是外袋自身特性,也不是关键缺点;故以上四项原因不足以提供方案模型。03号和05号原因所描述的内容属于现有工作过程中的某种工作状态,可考虑运用TRIZ工具对这两种工作状态做进一步的研究;04号原因是吸盘吸力方向所决定的,亦可作进一步讨论。
4.1 物场模型解决问题
针对功能组件分析和对03号原因进行分析,都可理解为开袋上吸盘对外袋的作用不足,从而导致外袋的上表面开袋效果不好,才呈现如图8所示的开袋情况。那么对开袋上吸盘、外袋、真空气构建物场模型进行分析。功能载体:开袋吸盘;功能作用体:外袋;功能:真空场。用物场模型来描述该问题模型,如图11所示。

图11 系统物场模型
这是一个效应不足的物场模型,对这种物场模型,TRIZ理论中的标准解法第二级(S2级)中提供了多种解法。在此采用S2.4.9构造场方法(如图12),增加另一个场F2来强化有用的效应[5]。为了找到能够利用的场F2,采用资源分析来寻找可以利用的资源。系统中能够提供的资源种类有四类,分别是时间资源:开袋装置打开外袋后到拉内袋机械手伸出前的这段时间T;空间资源:开袋装置各吸盘之间的空间,以及被打开外袋中间的环形空间;能量/场资源:机械场、压缩空气流、外袋的重力场;功能资源:整机机架、拉内袋机械手、内袋、开袋装置、外袋。

图12 物场模型的第二种解法示意图
经空间资源分析得出开袋装置各吸盘之间的空间,以及被打开的袋子中间的环形空间可利用。提出可解决问题的方案一:在开袋上吸盘之间另增加两个吸盘,减小外袋上表面的下坠程度,这样能有效改善外袋的开袋效果,有利于拉内袋机械手顺利穿过外袋,且不会将外袋戳掉。
分析04号(吸盘吸力是竖直向上的)原因,目前吸盘对外袋产生的吸力是竖直向上的。当外袋产生下坠时,根据静力学的知识可知,在吸盘与外袋接触的位置,外袋表面张力对吸盘产生的拉力应当是斜向下的,然而此处吸盘产生的吸力是竖直向上的,吸盘产生向上的吸力不足以抵消外袋产生斜向下的作用力,这也是一个效应不足的物场模型。按照方案一的解题思路,提出可解决问题的方案二:将吸盘做改进,增加一种机械场来加强吸盘原有的真空气的作用效应,在吸盘的工作面上加若干根成45°倾斜布置的钢针,当吸盘接触编织袋时,钢针成角度的刺入外袋,给外袋提供一个45°斜向上的拉力,用以抵消外袋产生的斜向下的作用力,吸盘模型优化前后对比见图13。
4.2 技术矛盾解决问题
分析05号(吸盘的开袋高度低了)原因。对开袋装置而言,由于外袋口周长是定值,如果抬高它的袋口开袋高度,固会减小吸盘的长度,这样一来会影响开袋效果,这两个参数是相矛盾的。解决矛盾的重要途径就是利用阿奇舒勒矛盾矩阵。综上,对两方面的参数进行分析总结如下:
需要改善的方面——提高开袋上吸盘的开袋高度,改变外袋打开后的袋口形状;
造成恶化的方面——减小了吸盘长度,开袋困难。
定义矛盾:
需要改善的参数——12#形状;
造成恶化的参数——3#运动物体的长度。

图13 吸盘模型优化前后对比
查阅阿奇舒勒矛盾矩阵表得到这对矛盾对应的发明原理是29#气压与液压结构、34#抛弃与再生、5#组合、4#非对称这四个。采用4#非对称发明原理,其内容包括两种含义:第一种含义,物体的对称形式转为不对称形式;第二种含义,如果物体不是对称的,则加强它的不对称程度。由4#非对称性提出解决问题模型方案三:开袋装置的结构形式是对称结构,将其对称结构非对称化。对开袋结构形式做调整,如图14所示。图14中所述开袋上吸盘中的三个吸盘不等高(有高度差△h)且不同步动作,工作流程图如图15所示。

图14 方案三的模型

图15 方案三的模型的工作流程
4.3 方案选择
三个方案理论上都可以将问题得到解决,但是方案一的制作成本、结构复杂性以及整机重量均会提高,方案二需要重新设计零部件以及plc设计程序上改动较大,所以前两个方案只作为备选的参考方案。我们在现场调试过程中采用的第三种方案,并做了数据记录,发现方案三可以完全解决这一问题,不会出现拉内袋机械手戳掉外袋这种情况。
5 结语
①通过对饲料包装袋套袋机开袋装置进行问题描述、分析,将工程实际问题转化为TRIZ问题,运用TRIZ理论方法和工具提出解决实际问题的方案模型,并对方案模型进行分析选择,将最合适的方案实施在实物样机中,解决了问题,达到了理想效果。
②将TRIZ理论创新方法首次应用在饲料包装袋套袋机上,为后续对饲料包装袋套袋机的优化工作提供了导向。
猜你喜欢
今日农业(2022年15期)2022-09-20
能源工程(2022年2期)2022-05-23
花火·绘阅读(2021年1期)2021-09-10
重型机械(2020年2期)2020-07-24
装备制造技术(2019年12期)2019-12-25
学苑创造·C版(2019年4期)2019-05-09
中国果业信息(2019年1期)2019-01-05
商业文化(2017年26期)2017-03-20
学苑创造·C版(2016年12期)2017-01-17
儿童故事画报·发现号趣味百科(2015年4期)2015-12-04