全回转桨初始安装偏角对船舶操纵性的影响
2017-01-03 09:12:39吴兴亚高霄鹏
船海工程 2016年6期
吴兴亚,高霄鹏
(海军工程大学 舰船工程系,武汉 430033)
全回转桨初始安装偏角对船舶操纵性的影响
吴兴亚,高霄鹏
(海军工程大学 舰船工程系,武汉 430033)
针对全回转螺旋桨设计4种初始安装方案,通过在开阔水域开展船模回转、Z形操舵的大尺度自由自航模试验,对比各方案的回转直径、横倾角及速降等试验参数和相关性能指数,结果表明,当螺旋桨的初始安装位置为相对船艏呈外八字2°时,船舶的操纵性能较为优异。
全回转螺旋桨;初始安装偏角;船舶操纵性;自航模试验
一艘船的固有操纵性在设计建造完成之初就已经确定,主要由船体主尺度、艉部线型,以及桨、舵的尺寸大小、位置布置决定。对于常规桨、舵分离的船型,合理布置桨、舵的相对位置可极为有效地改善船舶的固有操纵性能,一些驱护舰型的设计经验更直接表明,舵适当合理外偏能缩小其定常回转直径[1-2]。而对于全回转桨吊舱推进器这一新型的船舶推进系统[3-7],未见有文献对全回转桨初始安装偏角对船操纵性能的影响进行研究。
为探究全回转桨不同初始安装偏角对船舶操纵性能的影响,根据布置在船尾一对全回转对转螺旋桨相对位置的变化,设计螺旋桨的4种偏角作为初始状态,通过船舶自航模试验,分别针对每种螺旋桨初始状态进行回转试验、Z形操纵试验,探究确定螺旋桨初始偏角的最佳方案,为船舶操纵性能的优化提供参考依据。
1 试验方案设计
本试验共设计4种螺旋桨初始偏角作为初始位置的方案,分别为平行布置(偏角为0°)和相对船艏呈外八字形布置(偏角依次为2°,3°,4°)2种基本状态。2种桨基本位置布置见图1。2桨均为全回转对转桨,铝合金材质,前桨为5叶螺旋桨,后桨为4叶螺旋桨。4种方案的全回转螺旋桨初始状态见表1。

图1 2种桨位置布置示意

方案编号2桨相对位置分布桨对应偏角/(°)1平行 02外八字形23外八字形34外八字形4
2 自航模试验
2.1 试验模型
自航船模采用玻璃钢材料制作,船模表面光滑,线型制作符合“水面自航模操纵性试验规程”CB*/Z 327—82的要求。自航船模量纲一的量化主要参数见表2。

表2 自航船模量纲一的量化主要参数
2.2 控制系统
自航模测控系统全部由计算机完成对船模的操控及运动参数的采集。自航模控制系统由岸上基地操纵系统、船载执行系统、数据采集系统组成,其中采用GPS定位系统记录船舶轨迹,标称平面椭圆误差为2 cm;采用惯导系统测量模型的相关运动参数;采用超声波式浪高仪测定试验现场的浪高、流速;采用YGY-FSXY1风速风向仪测量试验现场风速风向。数据传输采用无线通讯设备,将记录数据及时传回岸基控制系统,主要采集数据参数包括:倾角、航速、航向、坐标位置、三轴加速度、三轴角速度、舵机的转舵时间和转舵的角度、主推电机转速、主机的运行工况等。
3 试验及影响分析
3.1 试验内容


图2 回转速降与直径的关系
回转试验中定常回转航速Vs与定常回转半径Rs、横倾角φs的关系见图3。

图3 定常回转航速与定常回转半径和静横倾角乘积的关系
(1)
式中:h——船的横稳定中心高; ZG——船重心距船基线的垂直距离; ZH——水动力作用点到船基线的垂直距离。
图2、3体现出的曲线关系表明本试验4种方案的设计能满足船舶的一般操纵规律,试验结果的离散程度可以满足工程上的要求,为测量结果的分析比较开展提供了理论支持。
3.2 试验测量数据处理分析
3.2.1 回转试验
根据船模作定常回转运动得到的数据结果,作出4种方案下各参数的时历曲线,如图4所示为方案1下打左舵15°时船体作回转运动时的各参数时历曲线。由图4分析可得船体作左向15°的定常回转运动,回转过程中回转角速度稳定在6.1~6.2rad/s。在回转过程中由于船舶所受水动力的变化,船在打舵后2.4s时先向回转内侧横倾,在3.8s时达到最大角度为-1.3°,然后转为向外侧横倾,在8.2s时横倾角达到最大值度,此时的角度称为最大横倾角,继而船舶进入定常回转状态,横倾角稳定在3.0°~3.2°,此时的角度为定常回转横倾角,同时,纵倾角也经历相似的变化过程,最后稳定在0.45°~0.48°,以上各参数在受到试验现场风、浪、流等外在因素的影响下会有微小的波动,但均符合船舶作回转运动的一般操纵规律,同样方案2~4也遵循上述运动规律,这也为下文各方案测量结果的分析比较的开展提供了理论支持。
图5为4种方案下无因次定常回转直径随舵角的变化关系曲线,图6为不同回转角度下无因次定常回转直径各方案的对比。

图4 回转运动中各参数的时历曲线 (U=2.3 m/s 、δ=-15° )

图5 各方案下无因次定常回转直径与舵角的关系
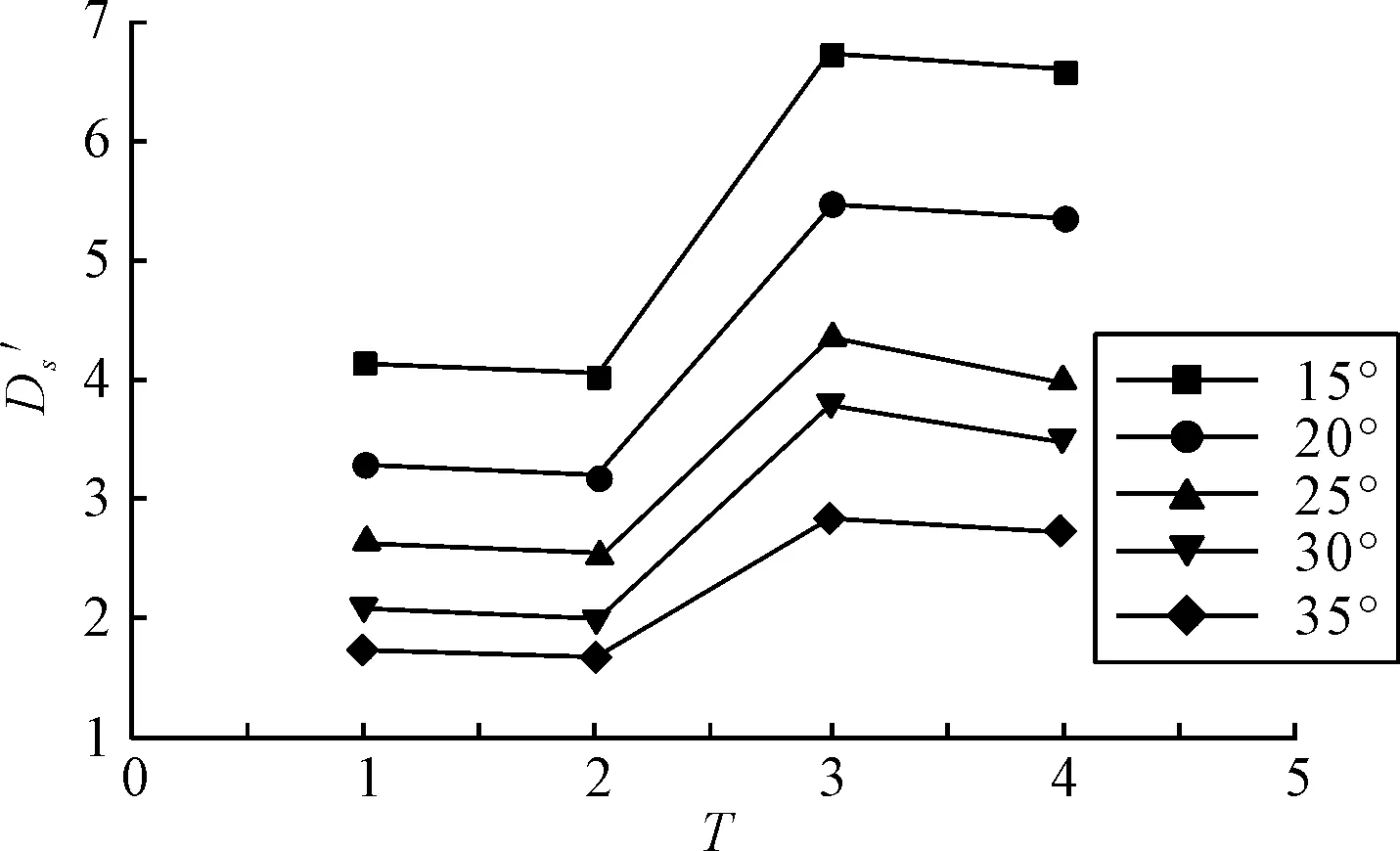
图6 +25°回转舵角下无因次定常回转直径各方案对比
由图5分析可得:在4种方案下,均遵循随着所操舵角的不断增大,无因次定常回转直径不断减小的船舶操纵规律;结合图6知,试验中操相同舵角,当螺旋桨的初始安装位置为相对船艏呈外八字3°、4°时,船舶的无因次定常回转直径较安装位置为平行、外八字2°时明显变大,其中当螺旋桨的初始安装位置为相对船艏呈外八字2°时最小,相比平行位置减小3%~5%,呈外八字3°时最大,相比平行位置增大56.9%~58.6%。
各方案下横倾角随舵角的变化以及不同回转角度下横倾角的各方案对比见图7~10。

图7 各方案下静横倾角与舵角的关系

图8 +25°回转角度下静横倾角各方案对比
由图8分析可得:在同一全回转桨初始安装偏角下,随着所操舵角的不断增大,静横倾角均不断减小,结合图9知,同一舵角下,当螺旋桨的初始安装位置为相对船艏呈平行、外八字2°时静横倾角值较为相近,相对较小,呈外八字3°、4°时静横倾角值也较为相近,相对较大,比较小时提高50.0%~58.6%。

图9 各方案下最大横倾角与舵角的关系

图10 +25°回转角度下最大横倾角各方案对比
由图9分析可得:在同一全回转桨初始安装偏角下,随着所操舵角的不断增大,船舶的最大横倾角不断增大。结合图10所体现出的变化规律可知,在同一舵角下,当螺旋桨的初始安装位置为相对船艏呈外八字2°,3°时,在回转运动中出现的最大横倾角相对较小,其中当呈外八字2°时最小,当螺旋桨的初始安装位置为平行和相对船艏呈外八字4°时,在回转中出现的最大横倾角相对较大,其中当呈平行时最大,约比初始位置为外八字2°时大6.2%~18.2%。
图11~14为4种方案下回转角速度、回转速降系数随舵角的变化关系曲线以及+35°下回转角速度、回转速降系数各方案对比。
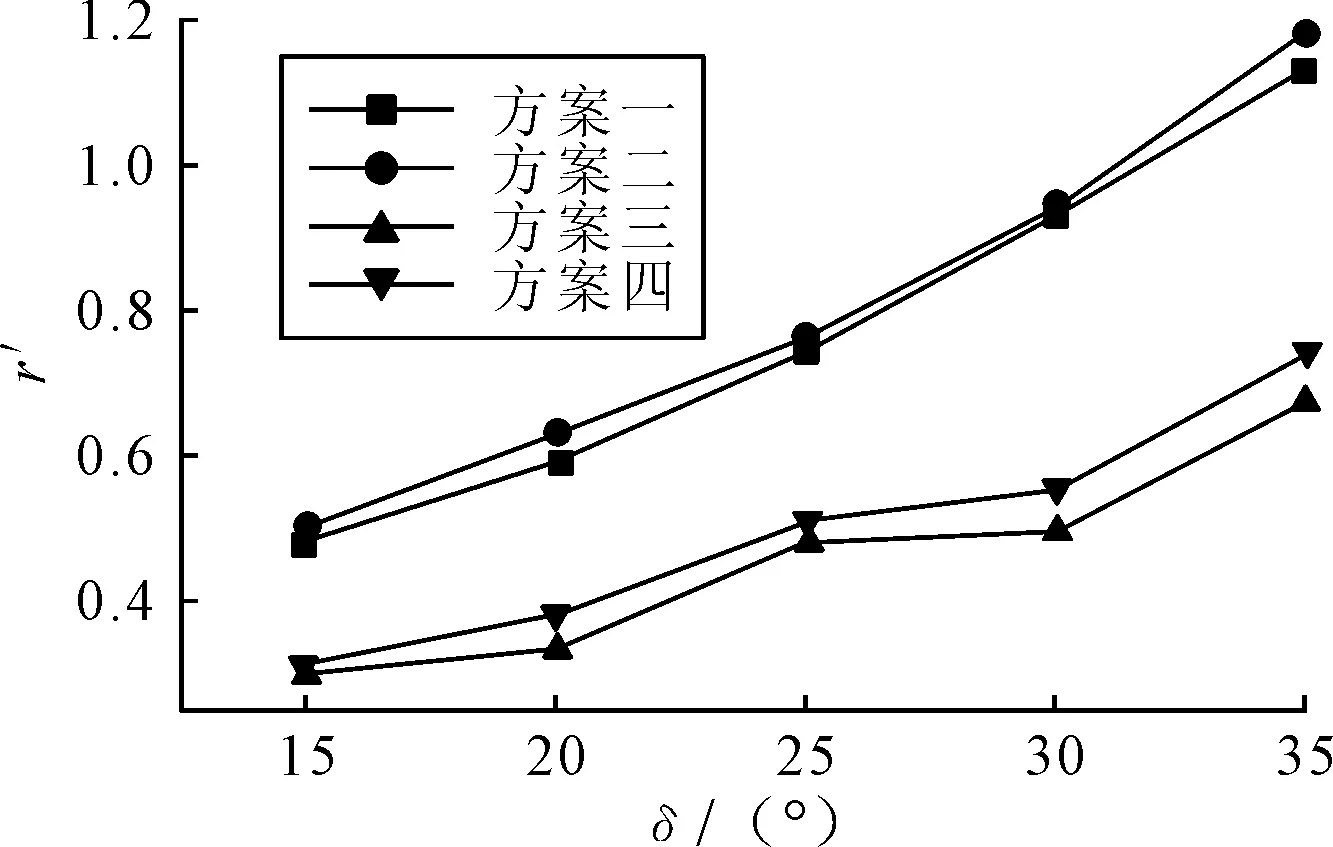
图11 各方案下无因次定常回转角速度与舵角的关系
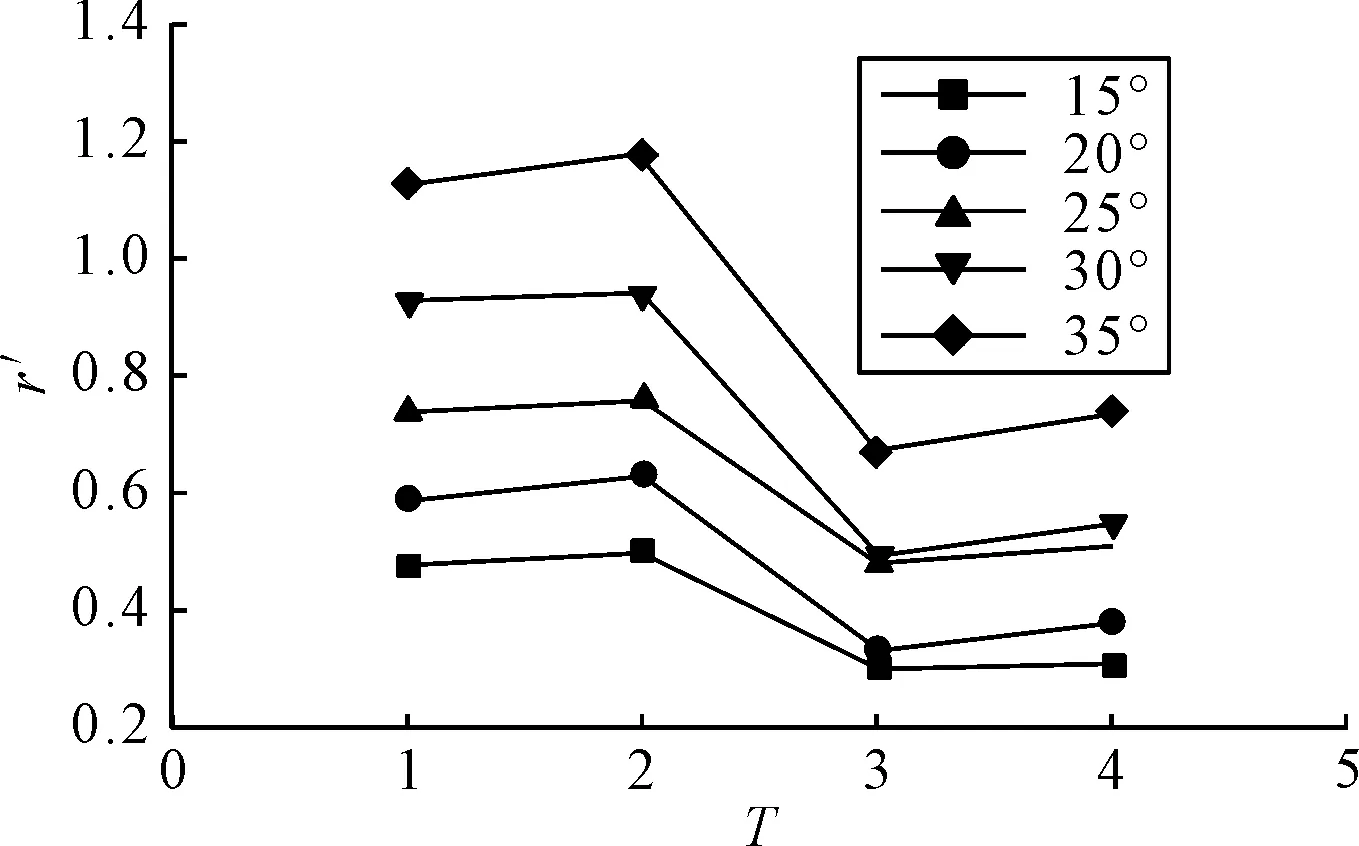
图12 +35°回转角度下无因次定常回转角速度各方案对比
由图11分析可得:在同一全回转桨初始安装偏角下,随着所操舵角的不断增大,回转过程中的回转角速度显著增大,其中当当螺旋桨的初始安装位置为相对船艏呈平行和外八字2°时规律性较为稳定。结合图12的变化规律可知,在同一舵角下,当螺旋桨的初始安装位置为相对船艏呈平行、外八字2°时,回转过程中的回转角速度较大,其中当呈外八字2°时最大,而当螺旋桨的初始安装位置为相对船艏呈外八字3°、4°时回转角速度较小,其中当呈3°时最小,约比呈外八字2°时小40%~43.2%。同时各方案下图11、图12中回转角速度体现出的规律形也与图9、图10中定常回转直径体现的规律性相符,即船舶作回转运动时,当回转角速度越大时,回转直径越小。
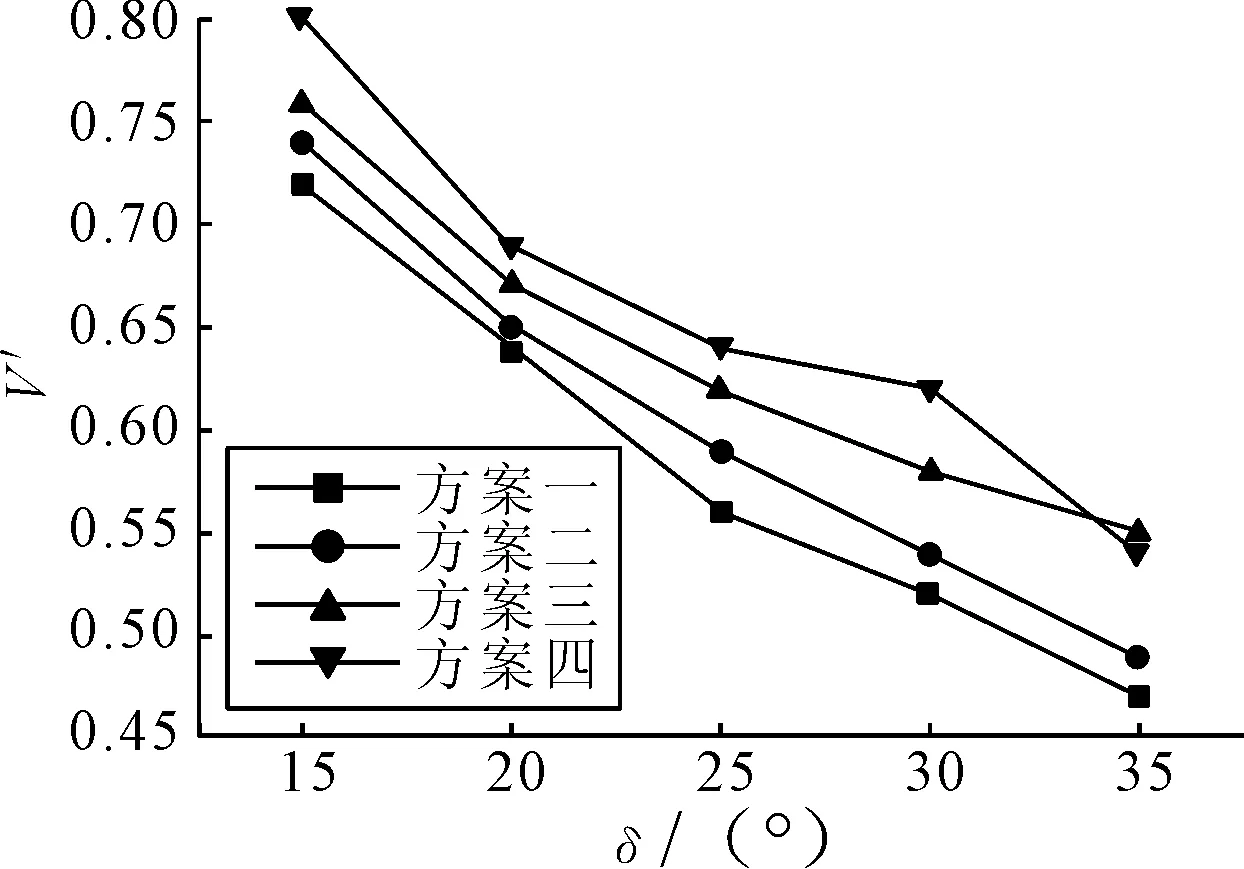
图13 各方案下定常回转速降系数与舵角的关系

图14 +35°回转角度下定常回转速降系数各方案对比
回转运动中,回转速降系数即为船舶定常回转时的航速与回转前船舶直线航行时稳定航速之比,所以同一试验航速下,速降系数越小,船舶定常回转时的航速越小。由图13分析可得:在同一全回转桨初始安装偏角下,随着所操舵角的不断增大,速降系数均逐渐变小。结合图14可知,同一舵角下,从方案1到方案4,速降系数不断增大,即回转航速不断增大,其中当螺旋桨的初始安装位置为相对船艏呈外八字4°时比平行时大7.8%~20.0%。
3.2.2Z形操纵试验
根据船模作Z形运动得到的数据结果,作出4种方案下各参数的时历曲线,方案1下+20°时轨迹时历曲线、舵角以及艏向角的时历曲线见图15、16。
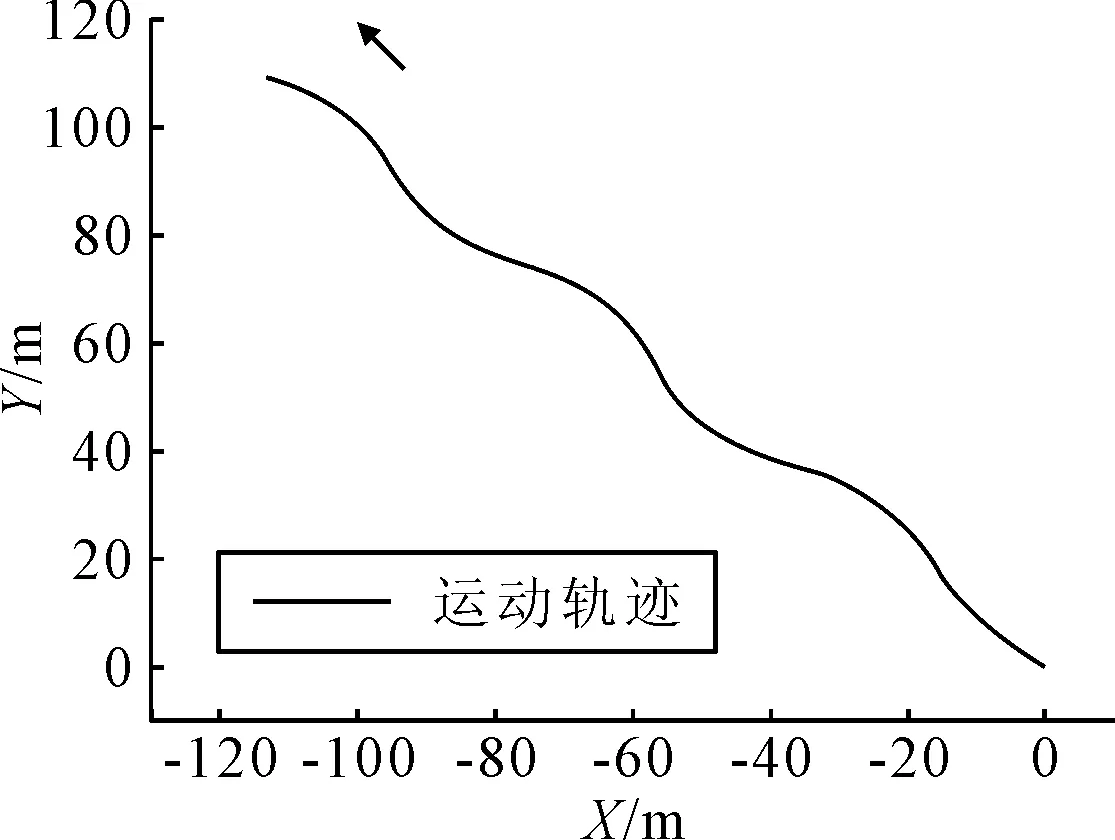
图15 +20°轨迹时历曲线

图16 +20°舵角与艏向角时历曲线
由时历曲线可直接测量初转期ta、超越时间ts、超越角ψs,以及周期T等特征值,并由时历曲线及各特征值分析出4种方案下的Z形操纵试验符合船舶的一般操纵运动规律,为进行的K、T指数,以及转艏性指数P的求解分析比较提供了理论支持。
通常用转艏性能指数或回转性指数等技术参数评估船舶的机动性,用航向稳定性指数或稳定性衡准数来表示船舶的航向纠正及保持能力,评估其航向稳定性。其中回转性指数K越大,定常回转角速度越大,回转直径越小,船的回转性越好;应舵-航向稳定性指数T越小,表示船舶的稳定性和跟从性越好,操舵后船能很快的进入定常回转;转艏性指数P越大,船的转艏性越好,船越容易改变航向。不同舵角的Z形操纵试验中所求K、T指数不同,但两者变化率近似相同,导致转艏性指数P比较稳定,而转艏性指数P仅与舵效及船的惯性相关,与船的稳定性无直接关系。4种方案下无因次回转性指数K′、无因次应舵-航向稳定性指数T′以及转艏性能指数P在不同舵角下的数值见表3~5。
在+20°角度下无因次回转性指数K′、无因次应舵-航向稳定性指数T′以及转艏性能指数P各方案对比见图17~19。
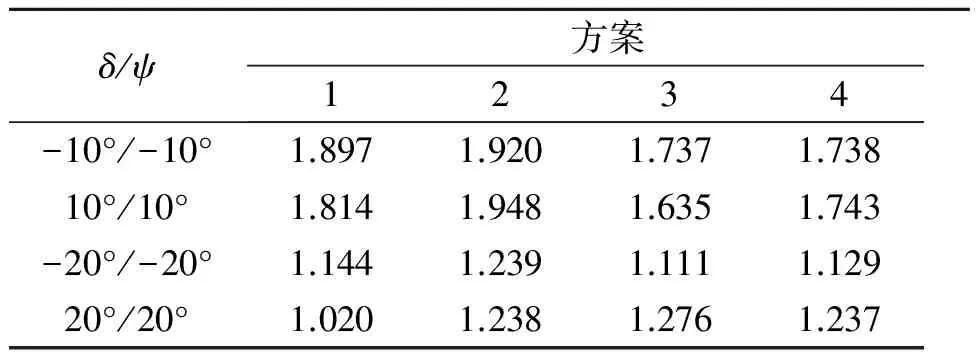
表3 无因次回转性指数K′在不同舵角δ下的数值
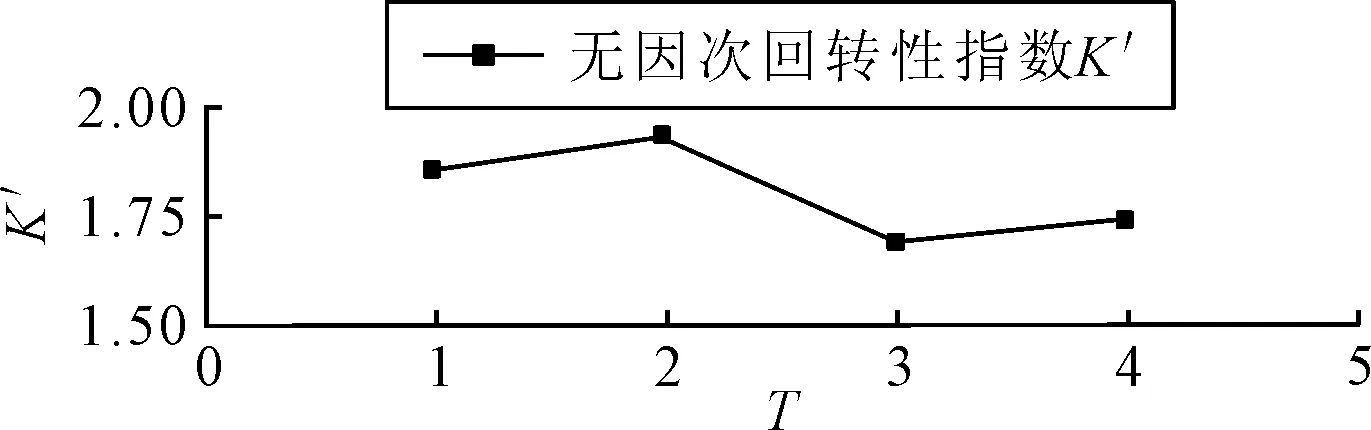
图17 10°/10°无因次回转性指数K′各方案对比
由表3可得:在各方案下,无因次回转性指数随着舵角δ从10°增大到20°明显减小。根据《舰船通用规范》规定,水面舰船转艏性能是以其最大设计航速下作10°/10°Z形试验的转艏性指数来衡准,结合图17,10°/10°下无因次回转性指数各方案对比可知,在相同舵角下,当螺旋桨的初始安装位置为相对船艏呈平行、外八字2°时,K′相对较大,呈外八字3°,4°时,K′相对较小,其中当螺旋桨的初始安装位置为相对船艏呈外八字2°时最大,回转性最好,外八字3°时最小,回转性最差。

表4 无因次应舵-航向稳定性指数在不同舵角δ下的数值

图18 10°/10°下无因次应舵-航向稳定性指数各方案对比
由表4分析可得:在各方案下,无因次回转性指数T′随着舵角δ从10°增大到20°明显减小,即应舵时间明显减少。结合图18,10°/10°下无因次应舵-航向稳定性指数T′各方案对比所示,同一舵角下,当螺旋桨的初始安装位置为相对船艏呈平行、外八字2°时,T′相对较大,呈外八字3°、4°时,T′相对较小,且值较为接近,其中当螺旋桨的初始安装位置为相对船艏平行时最大,应舵性最差,外八字3°时最大,应舵性最好。

表5 转艏性能指数P在不同舵角δ下的数值

图19 10°/10°转艏性能指数P各方案对比
由表5分析可得:由于转艏性指数P仅与舵效及船的惯性相关,故在4种方案下不同舵角的Z形操纵试验中转艏性指数P均比较稳定,均满足《舰船通用规范》中P值大于0.3的规范要求。结合图19,10°/10°下转艏性能指数P各方案对比表明,同一舵角下,当螺旋桨的初始安装位置为相对船艏呈平行、外八字2°时,P值较为接近,相对较小;呈外八字3°,4°时,P值也较为接近,相对较大,约提高超过71.6%。试验中发现该装有全回转对转桨的船的直线航行性能较常规桨舵分开船型较差,而对于直线不稳定或稳定性较差的船,转艏指数必须与表示稳定性的指数联合应用,才能全面反应操纵性能。
4 结论
在自航模试验的基础上对实验数据做了具体的的分析对比,得出初步的全回转吊舱推进器操纵性能优化的安装方法,下一步将采用数值模拟仿真的方法分析螺旋桨周围的流场变化,并从水动力出发重点分析不同安装偏角下的螺旋桨及船体的受力情况,以期待能在安装此类新型推进装置的船舶操纵性能方面得出更好的优化方案。
[1] YUMMURO A. Influences of propeller and rudder on maneuvering stability derivatives[J]. Journal of the society of naval architects of Japan, 1980,148:80-91.
[2] MORI M. Calculation of normal force of rudder behind propeller[J]. Journal of the Kansai Society of Naval Architects,1974,153:81-89.
[3] 刘洪梅.吊舱推进与传统推进船舶操纵性能对比分析[J].船舶力学,2011,15(5):463-467.
[4] 马志坚.Z轴全回转螺旋桨拖船操纵性能分析及应用[J].船海工程,2002.
[5] 霍虎伟.航海模拟器中全回转拖轮操纵运动建模与仿真[D].大连:大连海事大学,2013.
[6] 郑巢生.全回转吊舱推进器回转状态水动力性能预报[C].第十三届全国水动力学学术会议暨第二十六界全国水动力学研讨会文:F集.上海:水动力学研究与进展杂志社,2014-08.
[7] 王文涛.全回转吊舱推进器性能预报:仿真与试验研究[J].造船技术,2012.
[8] 范尚雍.船舶操纵性[M].北京,国防工业出版社,1988.
Influence of Initial Installation Angle of the Full-revolving Propeller upon the Ship Maneuvering
WU Xing-ya, GAO Xiao-peng
(Dept. of Naval Architecture Engineering, Naval University of Engineering, Wuhan 430033, China)
Specific to the influence of different full-revolving propeller’s initial installation angle of the ship maneuverability, four initial installation schemes of propeller were designed. In each case, the free-running model tests, including circle test and the zigzag test were carried out in the open and still water to investigate its test parameters, such as tactical diameter, roll angle, speed drop and relative performance index. Experimental results showed that the ship’s maneuverability is excellent when the initial installation site of propeller is toe-out 2° relative to the bow.
full-revolving propeller; initial installation angle; ship maneuverability; free-running model test
10.3963/j.issn.1671-7953.2016.06.003
2016-04-13
吴兴亚(1992—),男,硕士生
U661.33
A
1671-7953(2016)06-0009-06
修回日期:2016-05-11
研究方向:船舶与海洋结构物设计制造
E-mail:282294867@qq.com
猜你喜欢
意林(2023年18期)2023-11-05 10:45:10
江苏船舶(2021年4期)2021-09-28 08:09:10
舰船科学技术(2021年8期)2021-09-18 08:36:06
民用飞机设计与研究(2020年4期)2021-01-21 09:15:46
舰船电子工程(2020年4期)2020-06-19 06:14:48
新课程·中学(2019年7期)2019-09-17 13:41:15
中国生殖健康(2019年7期)2019-01-06 09:27:48
物理教学探讨(2018年1期)2018-02-13 09:26:52
中国水运(2015年2期)2015-04-23 15:04:07
中国火炬(2012年3期)2012-07-25 10:34:09