连接刚度对舵机加载系统性能的影响
2016-12-28 01:24张春春毕永利
黑龙江大学工程学报 2016年4期
张春春,毕永利
(黑龙江大学 机电工程学院,哈尔滨 150080)
连接刚度对舵机加载系统性能的影响
张春春,毕永利*
(黑龙江大学 机电工程学院,哈尔滨 150080)
介绍了舵机加载系统的结构及其数学模型,分析了连接刚度对系统性能的影响,主要包括机械谐振、稳定性和多余力矩等,并进行了实验仿真验证。结果表明,在满足系统稳定性和机械谐振频率要求的条件下,降低连接刚度有利于系统的调节和性能的改善。
舵机加载系统;连接刚度;机械谐振;稳定性;多余力矩
电动加载系统是用于模拟各种航行器在飞行过程中舵面所受空气动力载荷的重要设备[1-2],是航行器大回路半实物仿真系统的重要组成部分[3-4]。随着力矩电机技术水平与电力电子器件性能的提高,使具有响应速度快、精度高、控制方便等优点的电动加载成为可能[5]。电动加载系统的性能指标分为静态性能指标和动态性能指标,其中连接刚度对两个指标均有显著影响,文中主要讨论了连接刚度对加载系统性能的影响。
1 加载系统的结构与数学模型
1.1 加载系统的结构
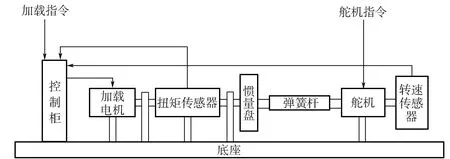
图1 舵机加载系统的基本结构Fig.1 Basic structure of servo loading system
舵机加载系统的基本结构见图1。舵机加载系统在工作时,给定控制柜加载指令,控制加载电机进行加载。但是,由于舵机加载系统是被动式加载控制系统[6],在加载过程中舵机一般处于运动状态,对力矩加载过程是一个很大的扰动,这就要求加载过程具有消除或抑制位置扰动的能力。图1中加入弹簧杆的目的是验证其对系统稳定性的影响和消除多余力矩的效果。
1.2 加载系统的数学模型
1.2.1 加载电机模型
电压平衡方程:
(1)
电磁转矩方程:
Tm(t)=Kti
(2)
1.2.2 连接装置模型
(3)
T(r)=K(θm-θa)
(4)
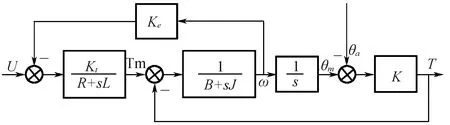
图2 系统控制方框图Fig.2 System control block
式(1)~式(4)中U为电枢电压;i为电枢电流;L为电枢电感;R为电枢电阻;ω为电机转速:Tm为电磁转矩;Ke为反电动势系数;Kt为转矩系数;J为等效转动惯量;B为粘滞摩擦系数;T为负载转矩;K为弹簧杆刚度系数;θm为加载电机轴转角;θa为舵机轴转角。
根据式(1)~式(4),通过拉氏变换并整理,可得舵机加载系统负载转矩的函数,见式(5),该函数转换为控制方框图,见图2。
(5)
2 连接刚度对系统性能的影响
从加载系统的数学模型可知,系统输出转矩由两个部分组成:力矩指令信号引起的输出转矩和舵机角位移信号引起的输出转矩,分别对应加载通道和扰动通道[7]。加载通道对应加载性能,扰动通道对应多余力矩。
2.1 连接刚度对系统机械谐振的影响
加载性能是指不考虑舵机运动时系统的性能(即静态加载),与系统的无扰指标相关。无扰加载频宽是衡量无扰性能的主要指标。由于谐振频率制约着系统频宽(见实验仿真及分析部分),为满足系统频宽的要求,在电机参数确定的情况下,需要分析连接刚度K对系统谐振频率的影响。
令式(5)中舵机角位移θa=0,并进行适当的变形,得到的加载通道的传递函数:
(6)
考虑到电机电感和阻尼系数较小,连接刚度较大,忽略小系数项之后,可将系统分解成比例环节和振荡环节的串联形式:
(7)
比例环节只将幅频曲线上下平移,不改变相频特性。对于振荡环节,将其化为二阶系统的标准形式,并令角频率和阻尼比分别为:
(8)
(9)
(10)
对振荡环节的幅频函数取极值,可求得谐振频率:
(11)
当转动惯量J为某一确定值并且连接刚度K很大时,谐振频率ωr很大,只要ωr处在跟踪系统的通频带之外(即高频段),则机械谐振对整个系统性能的影响可忽略不计。如果K变小,则ωr也变小,使得谐振频率有可能落入跟踪系统的通频带之内,此时对系统有很大影响,甚至产生自激振荡。
2.2 系统稳定性对连接刚度的要求
Kp>0
KI>0
KD≥0
(12)
由式(12)可见,在满足系统稳定的要求下连接刚度的取值是有上限的,该上限与加载电机参数、控制器参数和系统转动惯量有关。从数学模型知,连接刚度仅影响系统开环传递函数的极点,而对开环增益和开环零点并没有影响。当引入PID调节器时,整理可知系统传递函数分子分母均发生变化,即改变了系统的零极点分布。当KD=0时,在电机参数确定的条件下,连接刚度K的取值上限与KP和KI的选取成反比。因此,在满足系统稳定性的前提下,选择的刚度较大时,必然会限制PID控制器的KP与KI的大小,从而影响到加载系统的动态性能和控制精度,这与实验调试的结果相吻合。
2.3 连接刚度对多余力矩的影响
舵机加载系统是被动式加载控制系统,在加载过程中,舵机处于运动状态,对加载过程是一个很大的扰动(即多余力矩),在系统中加入弹簧杆可对这种扰动起到一定的缓冲作用,消除部分多余力矩,使多余力矩幅值衰减、相位滞后,但同时刚度降低也对加载通道有幅值衰减、相位滞后的作用。
3 实验仿真及分析
根据实验设备可得相关参数,具体值见表1,在Matlab中对系统的特性进行实验仿真并分析。

图3 系统静态加载特性Fig.3 System static loading characteristics
Table.1 Simulation parameters table

参数取值电枢电阻R/Ω4.0电枢电感L/mH9.8反电动势系数Ke/(V·s·rad-1)1.7转矩系数Kt/(N·m·A-1)1.8粘滞摩擦系数B/(N·m·s·rad-1)0等效转动惯量J/(kg·m2)0.1
首先分析系统静态加载特性,根据表1中参数可得加载通道的频率特性曲线,见图3。由图3可见,系统存在谐振频率点,系统加载频宽不能超过此谐振频率的范围,也就是谐振频率制约着系统频宽。
再考虑在不同连接刚度下,加载通道和扰动通道的频率特性,见图4、图5。在特性曲线图中,曲线1、2、3分别对应的刚度系数是200、2 000、20 000 N·m/rad。由图4、图5可见连接刚度对系统的加载通道和扰动通道均有影响,刚度越小,系统的谐振频率越小,所允许的系统频宽也越小,同时相位滞后越严重,但是在抑制由舵机位置扰动引起的多余力矩时却有更好的效果。因此,低连接刚度有利于降低扰动通道对系统性能的影响。

图4 加载通道频率特性曲线Fig.4 Loading channel frequency characteristic curve

图5 扰动通道频率特性曲线Fig.5 Disturbance channel frequency characteristic curve
4 结 论
1)连接刚度不仅制约着系统频宽,刚度越大,频带越宽,同时也限制着PID控制器参数。刚度增大会导致控制器增益下降,控制系统快速性降低。
2)连接刚度对多余力矩有影响,降低刚度有利于抑制或消除部分多余力矩。
3)在满足系统机械谐振频率和稳定性前提下,选择适当的刚度系数和PID控制器参数,使系统整体满足动态特性和精度要求。
[1] Nam Y,Lee J,Hong S K.Force control system design for aerodynamic load simulator[C]// Proceedings of American Control Conference,Chicago,2000: 3043-3047.
[2] 范金华,吕鸣,刘建斌.舵机加载测试系统扰动补偿方法研究[J].兵工自动化,2007(60):61-64.
[3] 崔业兵,鞠玉涛,周长省.舵机电动加载测试系统设计及数值仿真研究[J].计算机仿真,2012(3):137-140.
[4] 崔业兵,鞠玉涛,郑健.舵机电动加载测试系统的研究[J].江苏航空,2010(s1):141-143.
[5] 朱伟.电动负载模拟器控制方法研究[D].西安:西北工业大学,2005: 5-7.
[6] Yang Dongwei,Wang Xiaodong.Surplus torque elimination of electrical load simulator based on servo error signal[J].IEEE,2011(11):949-952.
[7] Wang S,Yang C G,Chen F,et al.Research on modeling and parameter identification of electro-hydraulic servo loading system[C]// Advanced Materials Research,2014,889: 970-977.
Influence of connection stiffness on the performance of servo loading system
ZHANG Chun-Chun,BI Yong-Li*
(SchoolofMechanical&ElectricalEngineering,HeilongjiangUniversity,Harbin150080,China)
Structure and mathematical model of servo loading system is introduced.The connect stiffness is analyzed which influence the performance of whole system,including stability,machine resonance and surplus torque.Digital simulation is made and simulation result verifies that the reasonable low connect stiffness should be selected in the system to make system adjusting easier and reach better system performance.
servo loading system; connection stiffness; mechanical resonance; stability; surplus torque
10.13524/j.2095-008x.2016.04.063
2016-11-25
国家自然科学基金资助项目(61573131)
张春春(1989-),男,山西忻州人,硕士研究生,研究方向:智能仪器与智能控制技术,E-mail:zccdyx1271@163.com;*通讯作者:毕永利(1968-),男,吉林农安人,教授,硕士研究生导师,研究方向:运动控制系统设计,E-mail:biyongli@hlju.edu.cn。
TP273
A
2095-008X(2016)04-0087-05
猜你喜欢
数学物理学报(2022年4期)2022-08-22
数学物理学报(2021年4期)2021-08-30
北京航空航天大学学报(2021年7期)2021-08-13
数学物理学报(2019年4期)2019-10-10
自动化学报(2019年6期)2019-07-23
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
西南交通大学学报(2016年3期)2016-06-15
照明工程学报(2016年3期)2016-06-01
通信电源技术(2016年4期)2016-04-04