
基于直线特征和谱图理论的光学与SAR图像配准
2016-12-28 06:13:00高永光吕枘蓬宋志娜
地理空间信息 2016年10期
高永光,徐 军,吕枘蓬,宋志娜
(1. 61683部队,北京 100094;2.武汉大学 测绘遥感信息工程国家重点实验室,湖北 武汉 430079;3.武汉大学 遥感信息工程学院,湖北 武汉 430079)
基于直线特征和谱图理论的光学与SAR图像配准
高永光1,徐 军2,吕枘蓬2,宋志娜3
(1. 61683部队,北京 100094;2.武汉大学 测绘遥感信息工程国家重点实验室,湖北 武汉 430079;3.武汉大学 遥感信息工程学院,湖北 武汉 430079)

针对可见光与SAR图像配准问题,提出了基于直线特征和谱图理论的配准方法。通过提取图像的直线特征求交点,再利用特征点集构造Voronoi图,结合谱图理论寻找匹配的Voronoi多边形,从而获得配准参数,最后根据仿射变换模型得到配准结果。实验结果表明,与传统配准算法相比,本文配准方法普适性好、配准效率高。
光学图像;SAR图像;图像配准;谱图理论;Voronoi图
由于SAR影像和光学影像成像机理差异大,图像获取的视角、时间、环境等条件的不同,使得SAR影像和光学影像的配准存在很多问题[1]。目前光学与SAR影像配准方法大致分为两类:一是基于区域的配准方法,二是基于特征的配准方法[2]。前者按照相似性度量准则进行匹配,后者主要基于特征点、特征线、特征面进行配准。由于光学影像与SAR影像在辐射上的表现差异较大,同一目标灰度可能完全相反,因此很少采用基于区域的影像配准方法,而基于特征提取的影像配准技术则倍受关注。
谱图理论通过研究图的代数表示形式(如拉普拉斯矩阵、紧邻矩阵等),并对谱进行分析来研究图的结构信息,通过比较两个矩阵的特征向量确定特征集之间的对应关系,从而达到配准效果[3-5],其中由Voronoi区域构成的Voronoi图性质优良[6],因此被广泛应用于图像配准中。
本文从图像特征提取和配准策略两方面展开了研究。由于SAR影像面特征提取难度较大,本文通过提取影像的直线特征来构造特征点集,同时利用谱图理论引入点集的局部几何特征Voronoi图,更精确地描述了点集中元素的空间结构和分布特征,避免了传统点集配准算法需要重复迭代的问题,从而实现光学影像和SAR图像的配准。
1 研究方法
本文提出的基于直线特征和谱图理论的SAR影像与光学影像配准方法中,针对两类影像分别采用了不同的边缘检测方法,并用Hough变换提取直线特征,通过求解直线交点获得最初的特征点集,进而分别构造两个特征点集的Voronoi图;最后结合谱图理论求取相似的Voronoi多边形,获得两幅影像的变换关系,从而实现配准。算法流程图如图1所示。
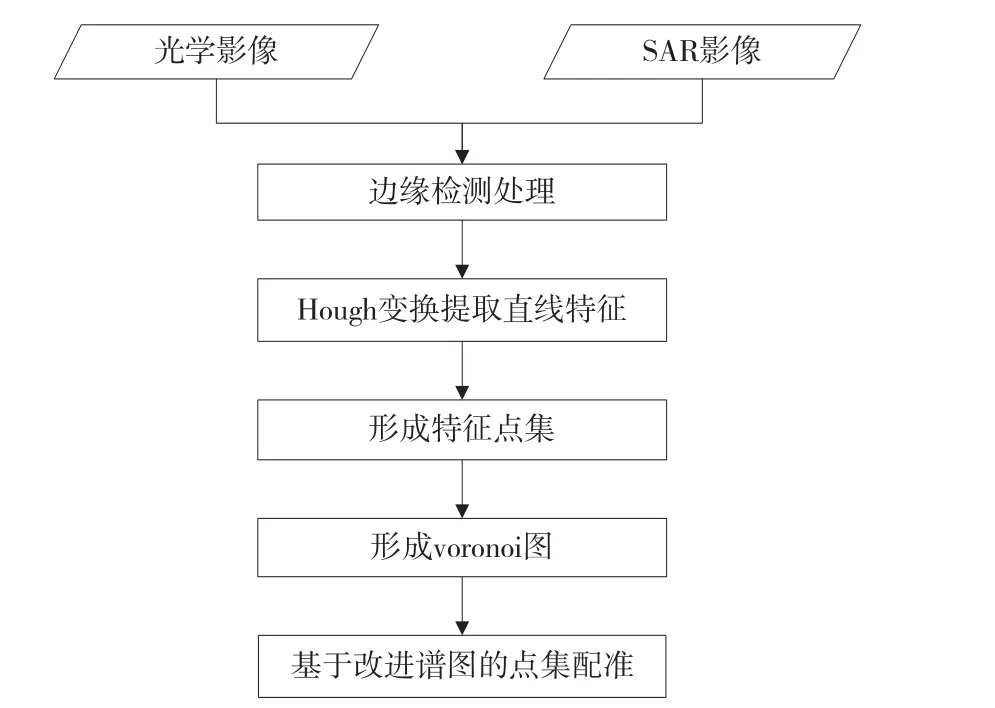
图1 基于直线特征和谱图理论的影像配准流程
2 基于直线特征和谱图理论的配准
2.1 特征点集的获取
由于SAR影像受相干斑噪声干扰严重,待配准影像几何差异大,同名特征点提取困难;同时考虑到SAR影像面特征提取难度大,甚至影像范围内不含面特征,本文方法直接提取影像的直线特征。线特征提取时首先抽取影像边缘,然后将这些边缘编组并连接为有意义的线状特征。光学影像只需采用Canny边缘检测就可以得到比较理想的边缘结果[7],而对于边缘信息提取困难的SAR影像则采用改进的RGOA算法来进行边缘检测[8],该方法利用梯度边缘的强度信息,增强空间相关的乘性噪声下边缘检测能力,可取得更好的效果。对影像的边缘采用Hough变换提取直线特征后,求取直线交点作为初始点特征。在求取直线特征的过程中,由于角点、噪声的存在以及对比度低等原因会造成大量断裂边缘;经过边缘修补后,虽然大多数断裂边缘可以被连接起来,但是这种现象仍不能完全避免。由于误差的存在,理论上位于同一条直线的线段其方程式不一定相同,这样求其交点就会产生一些干扰点,因此本文算法在获得直线交点后,首先利用改进的RANCE算法去除干扰点,然后对点集进行处理并获得最终的点特征。
2.1.1 改进的RANCE算法
获得待配准图像间的匹配对后再对图像间的变换关系进行估算,如果基准图上的点(x2,y2)对应的待配准图上的点是(x1,y1),假设两幅图像间的仿射变换关系可表示为:
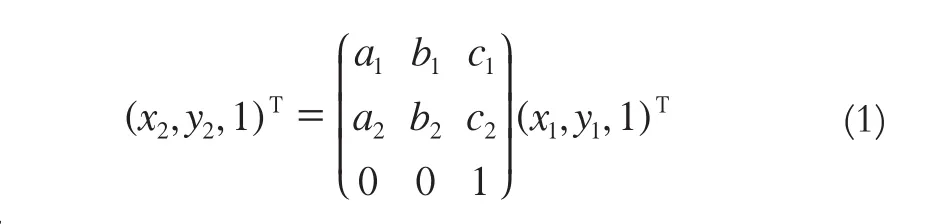
由上式关系中获得的特征点匹配中,还有可能存在误匹配。一般的RANSAC算法主要通过多次重复采样后选择标准方差最小的点集[9]。统计理论上,这种随机采样方法是成立的,这种方法比较适用于大数量点,但是在正确点的概率比较低和点数比较少时不适用。针对SAR和光学影像匹配点难获取的情况,本文提出了改进的随机采样方法:在点数量比较多时,从中提出3 000组;在点数比较少时则采用穷举法搜索出最精确的3个点以及与这3个点相对应的内点(每组3个点,保证这3个点距离不能太近,并且角度也不能太小)。为增加匹配点数量,将初匹配过程中判断为误匹配的点也依次代入进行检验,找出其中正确的匹配点,从而增加准确匹配点对数。
2.1.2 点集处理
相对于刚性变换模型,仿射变换模型下的点集配准更具有普适性,但参与计算的参数也随之增多,计算时间也相应增加。为了减少参数数量,提高计算效率,可先对上文得到的点集分别进行归一化处理,使两个点集间具有简单的旋转变换。因为满足归一化的两个点集X、Y具有如下特点:
1)两个点集X、Y的低阶质心矩满足下式:

2)处理后两个点集满足旋转变换。旋转变换满足行列式大于0且各向量正交归一化,可以表示为:

假设初始特征点集为W,归一化后的特征点集为W',则变换矩阵可由下式取得:

其中,AWW'为变换矩阵为点集W的协方差矩阵;ΛW为∑W的特征值矩阵;PW为的特征向量矩阵。由上式可见,直接求解两个点集之间的仿射变换时,需要计算的参数较多,而经过归一化处理后,两个点集之间变换为旋转变换,只需计算一个旋转角度即可。
2.2 基于改进谱图的点集配准
实际应用中,若两个特征点集之间相差较大,直接对其进行匹配往往难以得到满意的效果。所以要对点集进行一些处理,把点集嵌入到统一的特征空间中。本文通过将点集的几何特征Voronoi图与谱图理论相结合对点集配准。算法具体步骤如下:
1)假设由两幅图像中得到的特征点集分别为X、Y,首先分别构造两个特征点集的Voronoi图,分别记为Vx、Vy。
2)构造两个Voronoi图的关联矩阵G,G定义为:

式中,dij表示Vx中的第i个Voronoi多边形和Vy中的第j个Voronoi多边形之间的距离,本算法中Voronoi多边形之间的距离由hausdorff距离求得;参数σ值的大小由两个Voronoi图的相似程度确定。
3)对上式构造的矩阵G作奇异值分解,G=TDUT,T∈Mm,U∈Mn是正交矩阵,D为对角矩阵,其对角元素从大到小排列。
4)将D用m×n的矩阵E来代替,E代表对角元素均为1的矩阵,由此获得矩阵:的行向量和列向量分别代表特征Voronoi图Vx、Vy的Voronoi区域,而则代表Voronoi区域特征的匹配程度,若(i,j)为所在行的最大值,同时是所在列的最大值,则认为Vxi、Vyj是对应的Voronoi多边形,反之则不是。
3 实验与分析
为了验证本文提出的基于直线特征和谱图理论的光学与SAR影像配准方法的有效性,实验分别采用了光学与SAR传感器所拍摄的不同地区的两组实验影像。第一组数据选取了具有重叠区域的某机场影像,分别是大小为512×256像元、分辨率为6.5 m的光学影像和大小为519×272像元、分辨率为5 m的SAR影像。第二组数据选取了具有重叠区域的成都立交桥影像,光学影像大小为456×484像元;SAR影像为Cosmo影像,分辨率为1 m,大小为418×424像元。每一组配准实验都分别使用互信息算法(MI)、改进SIFT算法和本文算法进行计算[10-11],以比较3种算法的性能,证明本文算法的有效性。配准结果如图2所示。
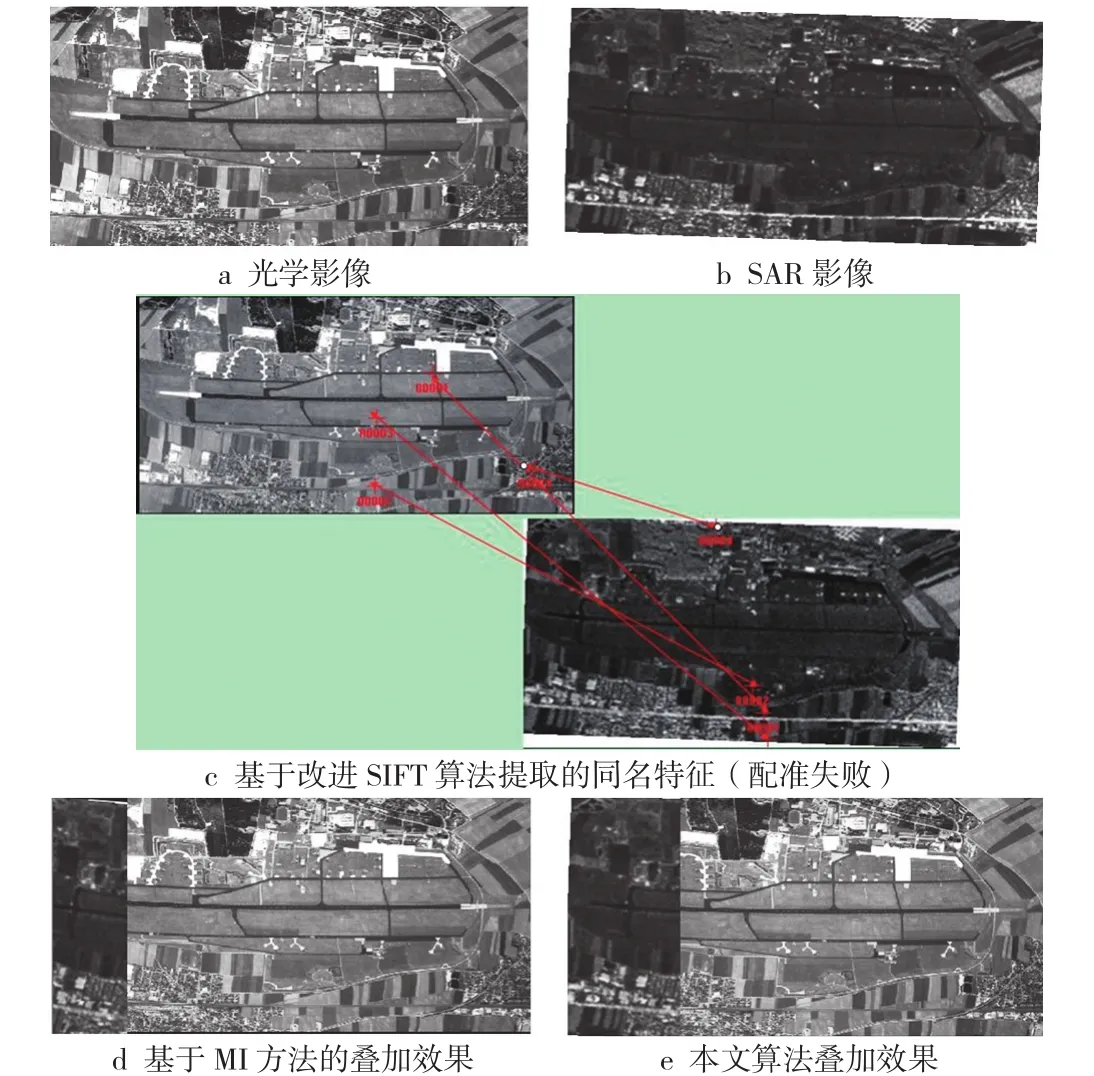
图2 机场影像配准实验
本实验进行精度评价时,手动选择10组同名点来计算RMSE,计算公式如下:

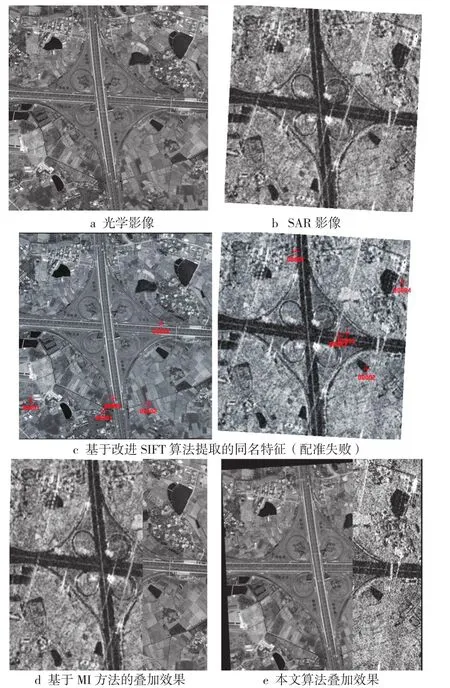
图3 立交桥影像配准实验
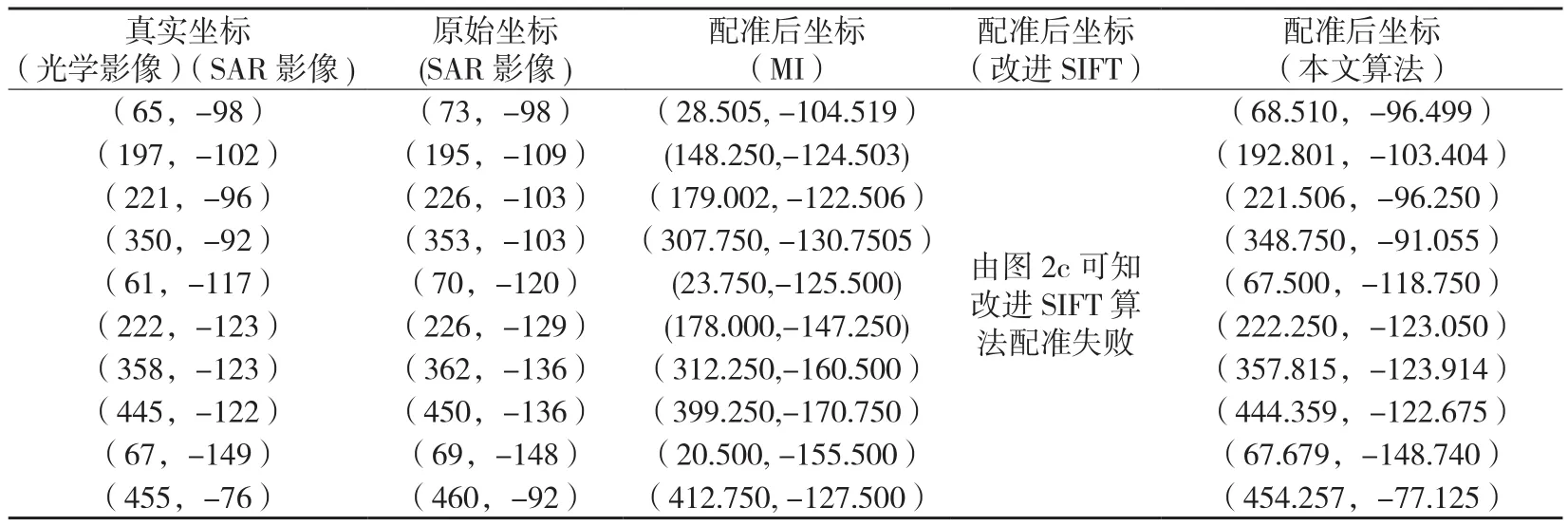
表1 实验1图像配准比较
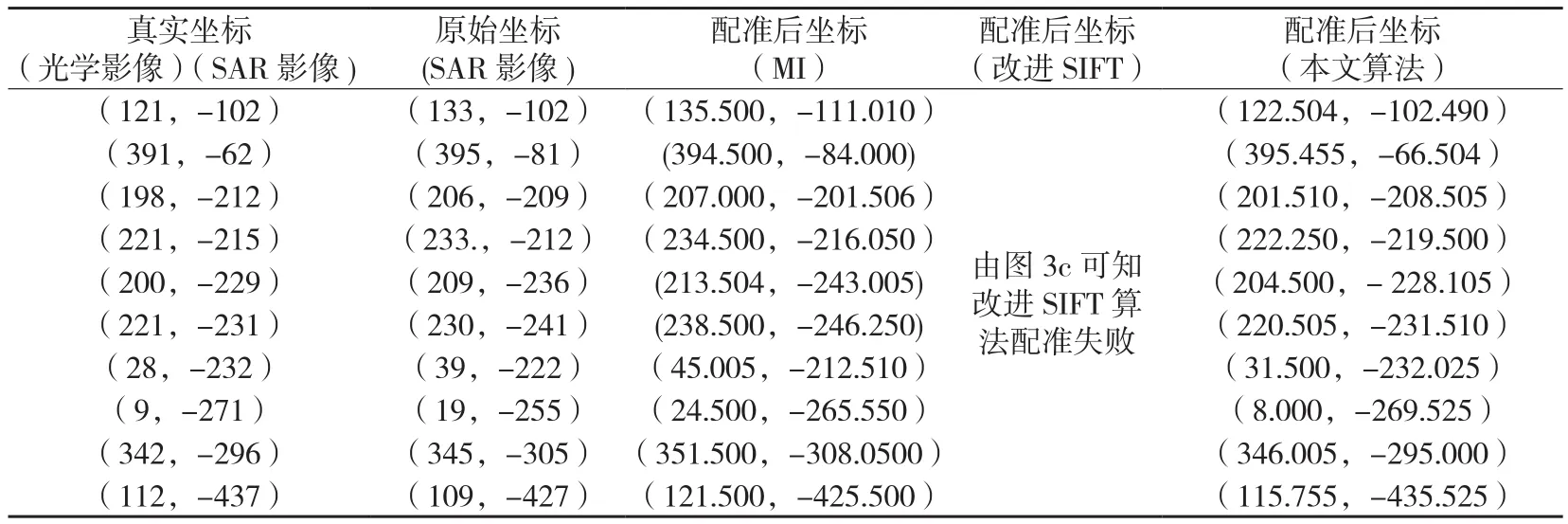
表2 实验2图像配准比较
式中,N为点数;xi、yi为待配准影像上的坐标;Xi、Yi为对应参考影像上点的坐标。两组实验的精度分析结果如表1、表2所示。从实验配准效果及精度分析可以看出,传统的配准方法(SIFT)由于影像灰度变化或相干斑噪声影响,配准效果很不稳定,而本文算法对这两类因子敏感度相对较低。相对于改进的互信息算法以及SIFT算法,
本算法成功率更高,配准精度也有了明显提高,对SAR与光学影像的配准具有较强的适用性。
4 结 语
本文针对可见光与SAR图像的配准问题,充分利用了谱图理论用于点集配准以及应用Voronoi图表示点集局部结构的优势,提出适合于光学影像与SAR影像基于直线特征和谱图理论的配准方法,实验证明该方法有效。但是如果影像区域不存在明显直线特征,则本文算法也不能很好地解决其配准问题。因此如何有效获取同名特征并且得到更佳的配准效果将是下一步要研究重点。
[1] 王运锋.SAR图像与光学图像数据融合算法研究[D].成都:子科技大学研究生院, 2003
[2] ZITOVA B, FLUSSER J.Image Registration Methods: a Survey [J]. Image Vision Computing, 2003( 21):977-l 000
[3] PILU M. A Direct Method for Stereo Correspondence Based on Singular Value Decomposition [C]. IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 1997: 261-266
[4] CARCASSONI M, HANCOCK E R. Graph Matching With a Dual-Step EM Algorithm [J]. IEEE Transactions Pattern Analysis and Machine Intelligence, 2003, 25(12):1 609-1 615
[5] XUE Z, TEOH E K. A Novel Eigenvector Approach to Pose and Correspondence Estimation [C]. Proceedings IEEE International Conference on Systems, Man and Cybernetics, 2000:1 489-1 494
[6] 陈军. Voronoi动态空间数据模型[M]. 北京:测绘出版社,2002
[7] 王植.多尺度自适应边缘检测方法研究[D] . 武汉:武汉大学,2004
[8] ZHENG Yao Bai,HE Pei Kun. An Improved Ratio Edge Detector for Target Detection in SAR Images [C]. Proceedings of the International Conference on Neural Networks and Signal Processing, 2003:982-985
[9] 陈艺虾,孙权森,徐焕宇,等. SURF算法和RANSAC算法相结合的遥感图像匹配方法[J]. 计算机科学与探索, 2012,6(9):822-828
[10] MAHMUDUL H, MARK R. Pickering and Xiuping Jia. Multimodal Registration of SAR and Optical Satellite Images [C]. Digital Image Computing: Techniques and Applications, 2009:447-453
[11] 杨雪梅,龚俊斌,王鹏,等.基于改进SIFT的SAR图像与可见光图像配准[J]. 航天控制, 2010, 28(6):13-17

图7 评价结果可视化界面
4 结 语
本文在“三旧”改造用地潜力评价研究的基础上,根据潜力评价业务需求,构建了“三旧”改造用地潜力评价系统,提高了潜力评价的科学性和客观性,为决策者提供辅助决策。
参考文献
[1] 郭谁琼,黄贤金,白晓飞,等,土地利用变更调查数据的应用研究现状与前景[J].中国土地科学,2013(12):18-24
[2] 李小军,吕嘉欣.广东“三旧”改造面临的挑战及政策创新研究[J].现代城市研究,2012(9):63-70
[3] 吴次芳,王权典.广东省“三旧”改造的原则及调控规制[J].城市问题,2013(10):78-84
[4] 吴晓峰,彭建东.基于生态城市理念的“三旧”改造模式研究:以东莞市“三旧”改造为例[J].城市发展研究,2012(6):19-22
[5] 雷霆,胡月明,王兵,等.“三旧”改造实施评价的指标体系构建[J].安徽农业科学,2012(21):10 955-10 957
[6] 高艳梅,李景刚,张效军.城市改造与城市土地利用效益变化研究:以佛山市禅城区“三旧”改造为例[J].生态经济,2013(1):59-63
[7] 张大伟,权锦,何晓燕,等.基于地理信息系统的一维溃坝洪水分析系统研发及应用[J].水利学报,2013(12):1 475-1 482
[8] 涂建军,卢德彬.基于GIS与耕地质量组合评价模型划定基本农田整备区[J].农业工程学报,2012(2):234-238
[9] 郑昊.TerraMap组件集成技术[J].计算机工程与设计,2012(2):798-803
[10] 宋金红,张熠斌,隋立春.基于组件式GIS的城市信息查询系统的设计与开发[J].测绘通报,2011(1):56-58
[11] 陈超泉,王政锋,匡昭敏,等.基于GIS的广西暴雨风险度实时评估系统[J].计算机应用,2013(1):276-280
[12] 古敏聪.基于GIS的“三旧”改造信息管理系统的设计与实现[J].测绘通报,2013(6):90-93
[13] 曾元武,陈泽鹏,吴楷钊.基于现代测绘技术的“三旧”改造监管系统建设[J].测绘通报,2012(S1):630-632
作者简介:王刚,工程师,主要从事大地测量、工程测量、GIS应用等方面的工作。
P237
B
1672-4623(2016)10-0046-04
10.3969/j.issn.1672-4623.2016.10.013
高永光,博士,工程师,研究方向为遥感应用。
2015-06-29。
项目来源:国家重点基础研究发展计划资助项目(2012CB719906);国家高技术研究发展计划资助项目(SS2013AA122301)。
猜你喜欢
初中生学习指导·中考版(2022年4期)2022-05-12 00:12:51
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16 05:32:06
小学生导刊(2018年13期)2018-11-30 15:19:29
数学小灵通·3-4年级(2017年10期)2017-11-08 08:43:10
小学生导刊(低年级)(2017年2期)2017-06-10 02:37:43
通信产业报(2016年44期)2017-03-13 08:41:45
航天返回与遥感(2014年1期)2014-07-31 17:55:36
自动化博览(2014年12期)2014-02-28 22:34:26
幼儿时代·故事妈妈(2004年4期)2004-03-17 08:08:22
雕塑(1999年2期)1999-06-28 05:01:42
