三维激光扫描技术在古建筑模型重建中的应用
2016-12-26 08:21:42彭文博杨武年
地理空间信息 2016年3期
彭文博,杨武年,王 鹏
(1. 成都理工大学 地学空间信息技术国土资源部重点实验室,四川 成都 610059)
三维激光扫描技术在古建筑模型重建中的应用
彭文博1,杨武年1,王 鹏1
(1. 成都理工大学 地学空间信息技术国土资源部重点实验室,四川 成都 610059)

以四川省闽良市某古建舍利塔为研究对象,使用FARO SCENE、Geomagic 2013、Photoshop CS3和3dsMax 2012等数据获取和处理软件生成逼真的舍利塔三维模型,为三维激光扫描技术在古建筑物保护和维修方面的应用提供了参考和借鉴。
三维激光扫描;古建筑保护;三维重建;GIS
古建筑作为特殊的文化信息载体[1],在一定意义上,见证了一个时代的变迁,一旦破坏,就再难以接续和修复。对古建筑进行三维重建是古建筑保护的有效手段[2]。三维空间信息数据的快速获取是制约古文物三维重建的一个难题。三维空间信息的获取其实质是空间定位数据的采集[3]。传统的三维空间数据获取方法多为单点数据获取[4],其获取的数据精度虽高,但耗时耗力,数据更新慢,难以满足信息快速发展的需求。三维激光扫描系统集成多种高新技术的三维坐标测量仪器,采用非接触式高速激光测量方式[5],可快速获取被测目标表面的阵列式几何图形的点云数据,可快速应用于城市建筑三维重建和局部信息的空间信息获取,是目前测绘发展的一个重要方向。本文结合三维激光扫描的基本工作原理及实施过程,以某摩崖造像舍利塔为例,探讨了三维激光扫描技术在文物建筑保护中的应用[6],给出了三维激光扫描数据采集、数据处理和模型构建的具体步骤。
1 三维激光扫描测量系统
三维激光扫描是以获取扫描对象表面点云的方式来采集物体表面的空间坐标的。地面三维激光扫描测量系统由地面三维激光扫描仪、后序处理软件、电源以及附属设备构成[7],它具有与扫描仪器相关的特定的坐标系统,称为仪器坐标系统。如图1所示,仪器坐标系统同样分为X、Y、Z三个坐标轴。坐标原点即激光发射点,Z轴向上为正,位于仪器的竖向扫描面内;X、Y轴都位于仪器的横向扫描面内;X轴与Z轴、X轴与Y轴分别相垂直,且X轴与Y轴构成右手坐标系,该坐标系中,Y轴正方向一直指向被扫描对象。
该系统中的扫描仪主要包括激光测距系统、扫描系统和支架系统,同时集成数字摄影和仪器内部校正等系统[8]。测量时采用高速激光测时、测距的方法获取点云坐标:首先,已知测量系统发射的激光束的水平角度α和垂直角度θ;然后计算脉冲从发射脉冲到接收反射回来的脉冲时间间隔t,进而计算距离S;最后从获取扫描反射接收的激光强度,对扫描点进行颜色灰度的匹配,可计算得到扫描点P(X,Y,Z)的三维坐标为:
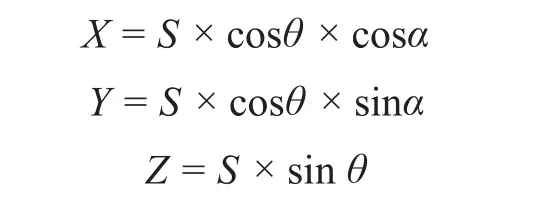
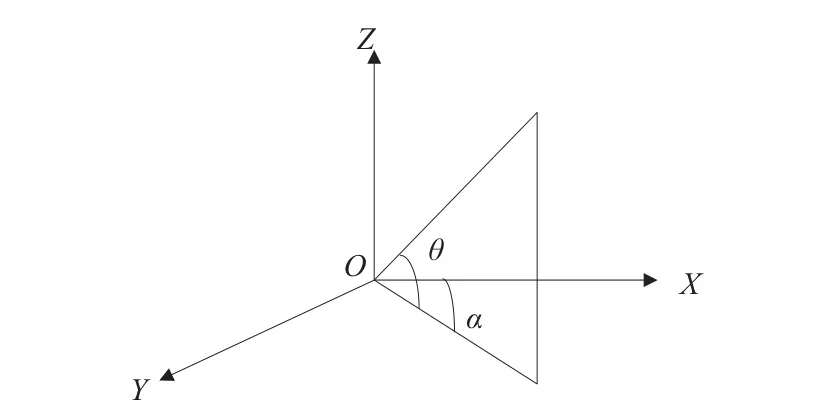
图1 三维坐标获取图
近年来,三维激光扫描通过与惯性导航系统(INS)、全球定位系统(GPS)、电荷耦合(CCI)等技术相结合已经在测绘领域中应用得越来越广泛,如城市三维重建、滑坡泥石流监测、变形监测等。此外,三维激光扫描技术在矿山测量、矿产储量分析、高山冰雪融化监测、高山与斜谷测土等方面也发挥了重要作用。
2 三维激光扫描工作流程
三维激光扫描的主要工作流程为制定严密的内业计划、现场勘查与定点、实施扫描、点云数据处理与三维建模。在具体实施之前应根据扫描对象的不同和数据采集精度要求,设计合适的扫描路线、测站数、大致的设站位置[9],确定合理的扫描距离和采样密度等。数据获取主要包括扫描对象点云数据的采集和影像数据的采集等。点云数据质量的好坏直接关系到后期数据处理的效果,因此在数据获取阶段还要初步验证点云数据的准确性。数据处理阶段主要是点云数据的预处理,如各测站点云数据拼接、去噪、简化、封装等。本次数据主要采用FARO SCENE、Geomagic、Photoshop和3dsMax 2012等软件进行处理,这就需要数据处理人员不但要具有一定的测量知识,还要具备一定的三维建模能力。
3 三维激光扫描在古建筑保护中的应用
3.1 古建筑点云数据的获取
以四川省某处摩崖舍利塔为例,本次扫描采用FARO Focus3D 120三维激光扫描仪和配套软件进行数据采集。由于舍利塔本身体型不算大,故本次扫描过程设置3个测站,采样密度设为10 m处6 mm;为了保证各站点云数据拼接的精度,设站时应尽可能保证站与站间扫描区域不低于10%的扫描重叠度。此外,由于该扫描对象处于旅游观赏区,故扫描时间选择在游客密度相对较少,遮挡相对小的时候进行。点云数据拼接后的效果如图2。

图2 舍利塔整体拼接图
3.2 古建筑建模
在进行古建筑三维建模时,利用点云数据可逼真地表现实体的空间形体特征;但要准确描述目标的细节特征,还需要构建精细的TIN三角网模型,在建立目标物的TIN模型时,需进行点云预处理,如点云去噪、封装、修复漏洞和纹理映射等。
1)点云拼接[10]。作为三维重建的基础数据,点云的精度决定了三维重建的精度,本次数据拼接是将3 个测站有一定重叠度的点云拼接成一个整体数据。
2)联合点对象,是将拼接后3个测站的点云模型联合成一个点云模型。该操作可以便于后续的采样、封装等。
3)点云去噪和体外孤点。扫描目标物获取的原始点云数据分布散乱,这是因为在数据扫描的过程中,任何无关的动作,如激光仪的轻微震动、激光散射、光线变化、人流树叶的遮挡等都会使测量得到的点云数据中出现噪声点、粗差点等,因此去噪和体外孤点对数据中的噪声剔除尤为重要。
4)统一采样。获取舍利塔点云数据时,采用的是分站式扫描,站与站之间的数据存在不低于10%的数据重叠度,使得各站获得的点云数据间有一定的数据冗余,因此在构建三维模型时需以某一阈值进行重采样,这样可以保证在不影响整体数据精度的前提下减少点云数量,便于删除重叠点云和稀释点云,采样后还可以提高数据处理时的运算速度。
5)封装和漏洞修复。统一采样后得到的三维点云模型并不能真实表现研究对象的实体表面,需要将这些空间离散点构建成三角网,以恢复研究对象表面复杂的拓扑关系。对于此,封装就是一种简单实用的方法。在数据采集过程中,由于舍利塔的伞状结构,使得舍利塔的顶部有些地方无法获取点云信息,造成局部点云数据的缺失,导致数据漏洞。在建模过程中需进行“补洞”,使研究对象的三维模型完整表达出来。舍利塔模型修复的效果如图3所示。

图3 舍利塔点云修复图
6)纹理贴图。纹理映射的主要目的是建立三维几何模型与影像之间的纹理关系,即建立几何模型上各三角形顶点与影像像素之间的对应关系[11]。将数码相机获取的影像数据赋给已经建立的研究对象的三维模型,使得三维模型表面具有真实的纹理信息。数码相机获取的影像数据不是正射图,使得已有纹理信息与实际信息出现偏差。为了改善这种纹理贴图偏差,需要对照片进行处理校正,转化为正射投影图后再进行纹理映射。该舍利塔局部纹理映射效果如图4所示。
4 结 语
以某摩崖造像舍利塔为例,本文详细阐述了基于三维激光扫描技术的古建筑三维模型重建,准确地获取了该舍利塔的三维空间数据和影像数据,给出了该舍利塔的三维模型效果图,并总结了实际操作过程中出现的一些问题。
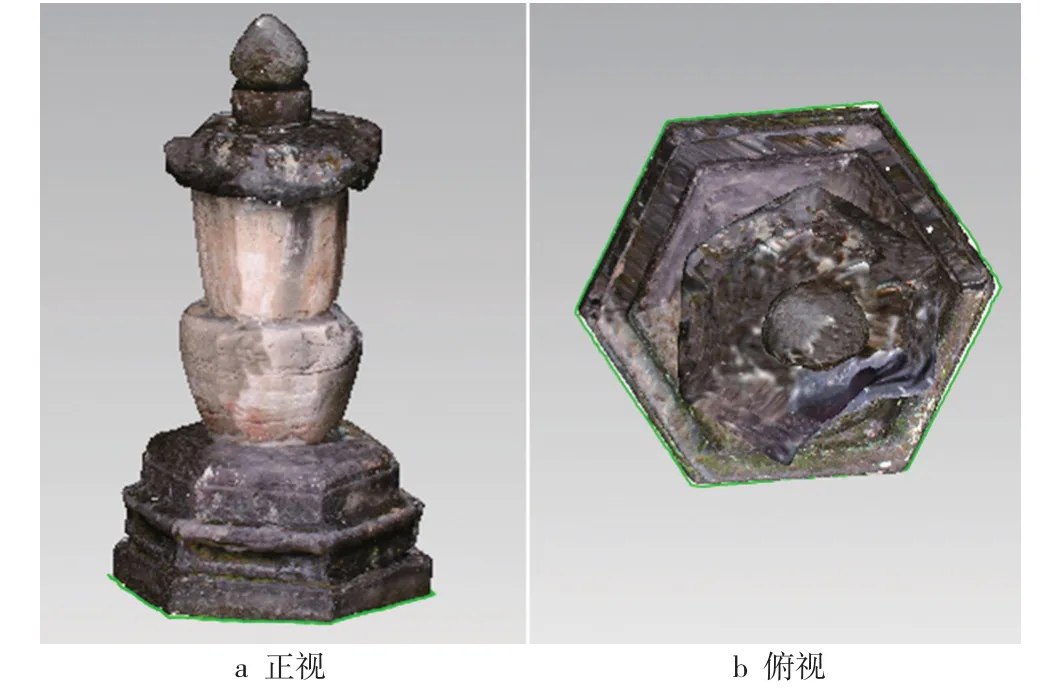
图4 舍利塔纹理贴图效果图
1)扫描阶段,要根据扫描对象所处实际地理位置进行细致安排,如该舍利塔地处旅游景区,选择在客流量相对少时进行扫描;此外,为保证数据质量,在确保精度的基础上减少数据冗余,应合理设置测站数和各测站点位置。同时,为了得到更为完整的点云数据,需结合近景摄影测量以弥补扫描时细节部分的缺失。
2)数据处理时,应根据相应模型质量要求合理安排相对处理因子,如统一采样间距、体外孤点敏感性设置等;在实际操作中,将三维激光扫描仪和高精度数码相机相结合,完整表达出该古建筑的三维模型。同时在进行纹理映射时,可能会因为有限的影像分辨率出现纹理拉伸,使得无法逼真呈现目标物的纹理信息,因此处理过程中将图片转换为正射投影图后再进行纹理贴图,能明显改善纹理偏差。
[1] 刑昱,范张伟,吴莹.基于GIS与三维激光扫描的古建筑保护研究[J].地理空间信息,2009,7(1):88-91
[2] 张键,董玉华.基于三维激光扫描技术的大型古建筑精细三维重建[J].河南城建学院学报,2013,23(2):58-62
[3] 刘春,刘伟.三维激光扫描对构筑物的采集和空间建模[J].工程勘察,2006(4):49-53
[4] 李长春,薛华柱,徐克科.三维激光扫描技术在建筑物模型构建中的应用与实现[J].河南理工大学报:自然科学版,2008,27(2):193-199
[5] 郑德华,雷伟刚.地面三维激光影像扫描测量技术[J].铁路航测,2003,29(2):26-28
[6] 汤羽扬,杜博怡,丁延辉.三维激光扫描数据在文物建筑保护中应用的探讨[J].北京建筑工程学院学报,2011,27(4):4-9,36 [7] 吴静,靳奉祥,王建.基于三维激光扫描数据的建筑物三维建模[J].测绘工程,2007,16(5): 57-60
[8] 李鹏,张文兵,李静.三维激光扫描测量技术[J].科技信息,2009(31):832-834
[9] 周华伟,朱大明,瞿华蓥.三维激光扫描技术与GIS在古建筑保护中的应用[J].工程勘察, 2011(6):73-77
[10] 李用强,刘会云,冯梅,等.大型古建筑文物三维数字化保护研究——以白马寺齐云塔为例[J].河南理工大学学报:自然科学版,2012,31(2):186-190
[11] 王昌翰,向泽君,刘洁.三维激光扫描技术在文物三维重建中的应用研究[J].城市勘测,2010,12(6):69-70
P208
B
1672-4623(2016)03-0094-03
10.3969/j.issn.1672-4623.2016.03.030
彭文博,硕士,研究方向为摄影测量与遥感。
2015-01-23。
项目来源:国家自然科学基金资助项目(41372340)。
猜你喜欢
学生天地(2020年31期)2020-06-01 02:32:16
软件(2020年3期)2020-04-20 01:45:18
软件(2020年3期)2020-04-20 00:56:34
摄影之友(影像视觉)(2018年12期)2019-01-28 09:01:00
视野(2018年18期)2018-09-26 02:47:52
Coco薇(2017年8期)2017-08-03 15:23:38
文物季刊(2017年1期)2017-02-10 13:51:01
光学精密工程(2016年6期)2016-11-07 09:07:56
腹腔镜外科杂志(2016年12期)2016-06-01 12:10:09
Coco薇(2015年5期)2016-03-29 23:22:15