弹丸海上落点声学测量方法研究
2016-12-23 05:31:13刘德耀吴军波武翰文
测试技术学报 2016年6期
刘德耀,吴军波,武翰文
(解放军92941部队94分队,辽宁 葫芦岛 125001)
弹丸海上落点声学测量方法研究
刘德耀,吴军波,武翰文
(解放军92941部队94分队,辽宁 葫芦岛 125001)
对大口径舰炮弹丸海上落点水声特性进行分析,提出采用水听器作为传感器,采集弹丸入水时产生的击水噪声信号,通过水听器在海面合理布阵,利用噪声信号到达各水听器的时延差(TDOA),对弹丸海上落点进行精确定位. 仿真计算结果表明,该方法具有测量范围大、 测量精度高等特点,能够满足大口径舰炮弹丸海上落点测量需求.
海上弹丸落点; 声学测量; 水声特性
0 引 言
舰炮威力是其作战效能的重要组成部分,对于中大口径舰炮,其有效射程及地面密集度是舰炮威力的核心技术指标之一[1],而这两个舰炮主要战术技术指标靶场试验的关键是弹丸落点的高精度测量. 舰炮对海射击时弹丸海上落点测量可采用无线电测量、 光学测量及声学测量等多种测量手段[2-6],本文针对弹丸海上落点的声学测量方法进行探讨.
1 弹丸落点声学特性及其检测方法
1.1 弹丸落点声学特性
弹丸入水过程分3个阶段:初始击水阶段、 空腔形成阶段和气泡脉动阶段. 与之对应的过程所产生的水下噪声信号主要包括击水声信号、 寂静区间和气泡脉动声信号. 图 1 为实验测得的空投目标溅落声信号时域波形图[7].
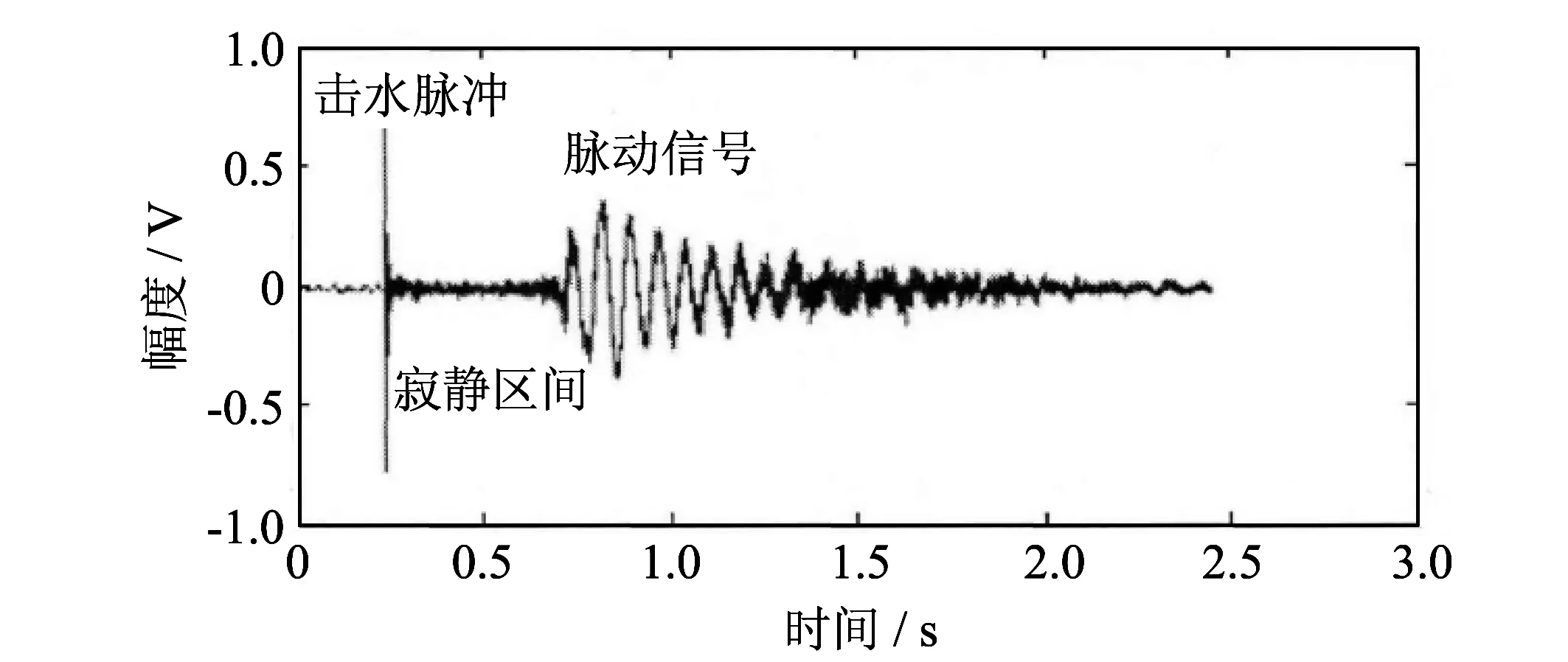
图 1 目标入水噪声信号Fig.1 The noise signal emitted by target into the water
在目标接触水面后的极短时间内,目标撞击和挤压周围的水介质产生幅度较高的冲击压力脉冲,即图 1 中所示的击水声信号(第一个脉冲信号). 随着目标入水过程的继续,水流从目标前端开始分离,形成充气空泡,目标愈深入水中空泡体积随之扩大,内部压力愈发降低; 同时在水面逐渐形成水花,水花溅落时产生二次击水声,但它们所包含的能量很低,这一阶段可看作一个声寂静区间. 寂静区间之后为气泡脉动声,当环境压力大于空腔内部压力时,空泡壁上的水质点向中心汇聚,出现闭合现象; 当物体高速入水时,所形成的空泡越大,空泡内外的压力差越大,其闭合过程越剧烈,产生的辐射噪声就越强.
1.2 弹丸落点信号检测方法
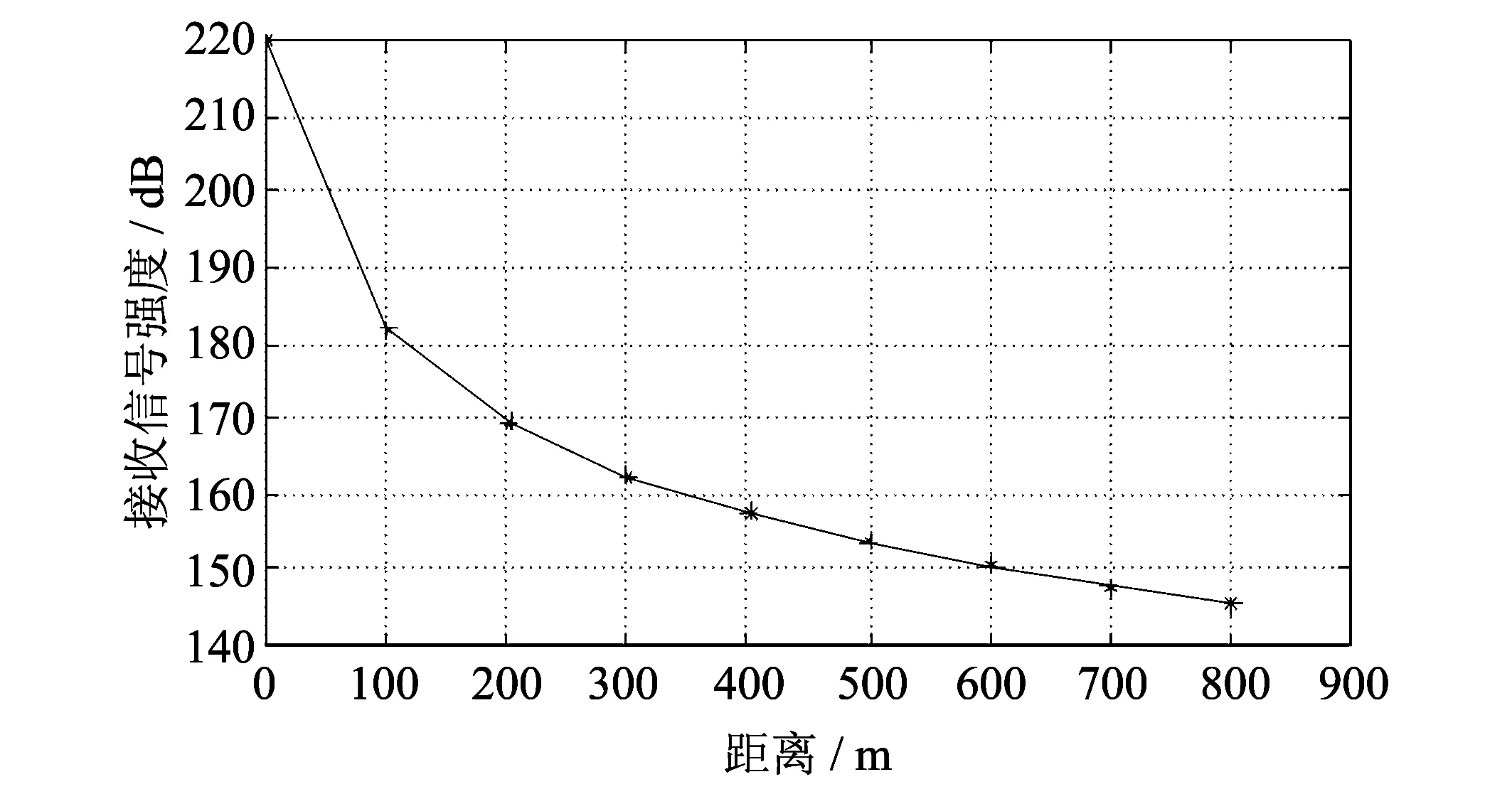
图 2 不同距离处击水声信号强度估算Fig.2 Water acoustic signal intensity estimates at different distances
弹丸落点可采用水听器检测其击水声信号(第一个脉冲信号)的方法进行定位,主要有两个原因: 一是其声源级高,易检测,参数估计精度高; 二是击水声产生位置直接对应弹丸入水点位置,定位结果直观反应弹丸落点.
目标击水声的产生与物体撞击水面及随后的运动紧密相关,严格的理论分析不易进行. 通过对不同入水速度、 不同入水角、 不同收发位置、 不同特征尺度的目标入水声的模拟实验数据分析,估算某型弹丸的击水声信号强度见图 2.
在三级海况下,500~5 500 Hz频带内的海洋环境噪声级约110 dB[8-10],在800 m距离处的接收信噪比约36 dB. 若系统检测阈值为10 dB,可满足800 m左右的水声作用距离要求.
2 测量原理及定位精度分析
2.1 弹丸落点测量基本技术要求
对弹丸落点最基本的测量技术要求有两点: ① 测量范围; ② 测量精度. 具体的测量范围及测量精度要求与弹丸散布有关,弹丸的散布因弹丸种类及其发射系统的不同而差异较大,如英国BAE公司研发的62倍口径155 mm“先进舰炮系统”(AGS)远程对地攻击弹(LRLAP)的散布约为20 m(CEP),而通常大口径舰炮的地面散布一般在1/300(变差系数EX/X,EX为距离散布,X为距离)左右,CEP约为100 m 左右. 综合考虑大口径舰炮武器系统的现状及发展趋势,其弹丸海面落点测量范围可确定为半径500 m的圆,测量误差优于5 m(标准差). 由2.2节论述可以得知,水声测量方法可以满足测量范围要求.
2.2 测量系统组成及工作原理
系统主要由主控单元、 无线传输单元、 信号处理单元、 水听器阵列(测量基站)等组成,见图 3. 测量基站检测出弹丸落水的噪声信号,并经过信号处理单元处理后通过无线传输单元上传至主控单元,主控单元根据噪声到达各基站的时间差,采用相应的软件完成弹丸落点的解算.
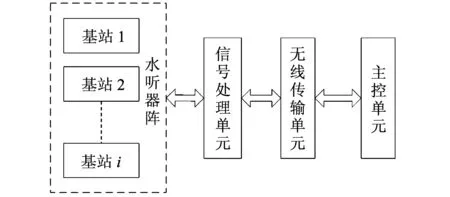
图 3 系统原理框图Fig.3 System schematic block diagram
2.3 目标定位方法及基站布设
目标定位方法有多种,其中时差定位方法(TDOA)又称双曲线定位方法,技术成熟,较易实现,本文以此为基础展开讨论. TDOA定位是由弹丸入水产生的噪声信号到达不同基站的时间差,计算出弹丸入水点到各基站间的距离之差,而两个基站的距离差能建立唯一的一条双曲线,由至少3个基站建立的双曲线方程组求解,得到交点来确定弹丸落点的坐标.
基站布设方式直接影响TDOA的测量精度. 根据平面上火炮弹着点的散布区域为椭圆形,散布密度服从正态分布的特性[11],并考虑到实际测量环境,基站以正多边形或L型布设为宜,测量中心与散布中心重合. 图 4 分别为正多边形6基站和L型7基站布站示意图.
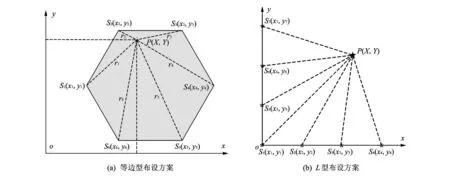
图 4 测量基站布设方案Fig.4 Layout Scheme of measuring stations
假设待求弹丸落点坐标为p(x,y),各基站坐标为si(xi,yi),则可得到方程组
式中:r1=c*t,r2=r1+c*(t2-t1)=c*(t1+τ21),…,ri=c*(t1+τi1).c为声在水中的传播速度,t1为噪声到达参考基站(s1)的时间(未知量),τ21,…,τi1为噪声到达各基站与参考基站时间差(可测量,已知量).
由式(1)可知,理论上3个基站就可对弹丸落点进行测量. 而实际使用中由于种种误差,完全一致的交点是不存在的,需要较多的基站得到超过未知量数目的方程组,获得更多的冗余信息来实现更准确的定位. 基站的数量大于3时,得到的非线性方程组个数要多于未知变量的个数,先将式(1)化为线性方程组,然后用加权最小二乘法求弹丸落点的精确解[12].
2.4 测量精度仿真计算
2.4.1 仿真条件
弹丸落点测量精度与基站基准位置精度、 时间同步精度、 噪声信号捡拾精度、 弹丸落点噪声及海况背景噪声相关,同时信号处理算法也对定位精度起着关键作用.
仿真条件按照工程可实现条件设定:
基站位置采用GPS定位,设定其精度为2 m(标准差); 声速装定误差0.2%(设定弹丸落点区域内海水声传播速度为1 500 m/s); 时间同步精度及噪声提取时延误差简化后综合为2 ms.
正多边型基站布设半径为500 m(分4基站、 5基站及6基站3种情况);L型基站布设为边长900 m的直角线(7个测量基站),见图 4. 测量基站坐标为图中标注的圆点.
2.4.2 仿真计算结果
应用MATLAB语言编程,采用蒙特卡洛法,每个测量点统计500次,得到不同基站布设情况下的定位误差空间分布,见图 5.
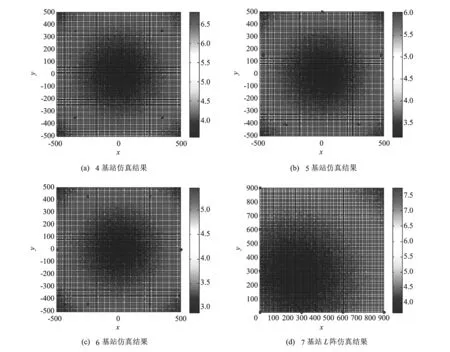
图 5 不同基站布阵测量精度仿真结果Fig.5 Measuring accuracy simulation results under different station embattle
仿真结果表明:
1) 测量基站的布设方式对测量精度及测量范围影响较大;
2) 等边多边形布阵优于L型布阵,在半径为500 m圆的范围内,测量精度优于5 m,满足弹丸落点的测量要求;
3) 测量中心区域的测量精度较高,测量边缘区域的测量精度较低;
4) 多测量基站有利于提高测量精度,当测量基站多于5个时,增加测量基站对提高测量精度影响不敏感.
3 结束语
弹丸海上落点测量手段有多种,各种测量方法均有其优缺点. 水声测量方法具有测量范围大、 测量精度高等优点,特别是环境适用性强、 使用方便,在工程实施方面具有独特的优势,更适用于靶场舰炮试验工作.
本文提出的采用水听器作为传感器提取弹丸落水噪声信号,采用TDOA定位原理进行弹丸入水点测量的方法,为大口径舰炮弹丸海上落点测量提供了一条新途径.
[1] 王保柜,张晨. 火炮系统效能评价方法研究[J].测试技术学报,2010(4): 287-292. Wang Baogui,Zhang Chen. Reseach on evaluation methed of artillerg system effectivness[J]. Journal of Test and Measurement Technology,2010(4): 287-292. (in Chinese)
[2] 辜珺琦. 舰炮落点预测系统研究与开发[D]. 成都: 电子科技大学,2011.
[3] 靳田保,郝晓剑,周汉昌. CCD交汇测量高速弹丸落点坐标设计研究[J]. 电子测试,2011(6): 54-56. Jin Tianbao,Hao Xiaojian,Zhou Hanchang. Study of measure high-speed projectile impact point coordinates by dual CCD[J]. Electronic Test,2011(6): 54-56. (in Chinese)
[4] 徐诚,黄大庆. 无人机光电侦测平台目标定位误差分析[J]. 仪器仪表学报,2013(10): 2265-2270. Xu Cheng,Huang Daqing. Error analysis for target localizatiaon with unmanned aerial vehicle electro-optical detection plantform[J]. Chinese Journal of scientific instrument,2013(10): 2265-2270. (in Chinese)
[5] 方俊伟. 地面炮弹密集度测试系统的研制[D]. 合肥: 中国科技大学,2007.
[6] 刘志坤,刘忠,付学志,等. 基于矢量水听器的水下目标定位系统[J]. 火力与指挥控制,2011(12): 51-53. Liu Zhikun,Liu Zhong,Fu Xuezhi,et al. Study on underwater target loacalization based on vector hydrophone[J]. Fire Control & Command Control,2011(12): 51-53. (in Chinese)
[7] 吴成刚.水下瞬态信号特性获取与分析[D]. 哈尔滨: 哈尔滨工程大学,2009.
[8] 周德生,韩庆伟,陈庆元. 水声对抗的现状及发展趋势[C]. 江苏省系统工程学会第十届学术年会论文集,2007: 412-415.
[9] 骆文于. 海洋环境噪声场分析及声场数值预报系统[D]. 北京: 中科院声学所,2001.
[10] 李整休,彭朝晖,何利. 海洋环境噪声源级经验公式修正[C]. 中国声学学会2010年学术会议论文集,2010: 1-2.
[11] 李魁武,王宝元. 火炮射击密集度研究方法[M]. 北京: 国防工业出版社,2012.
[12] 范平志,邓平,刘林. 蜂窝网无线定位[M]. 北京: 电子工业出版社,2002.
The Projectile Demonstration of Acoustics Measurement of Falling Point on the Sea
LIU Deyao,WU Junbo,WU Hanwen
(Unit 92941 of PLA,Huludao 125001, China)
Analyzing method about acoustic characteristics of the large-caliber gun projectile falling point on the sea has been put forward in this paper. Using hydrophone sensors, the noise signal generated by the projectile splashing into the water is collected, Via placing the hydrophone reasonable embattle in the sea, using the TDOA that noise signal arrives at each different hydrophones, projectile falling point on the sea is accurate located. The simulation results show that this method has the characteristics of large measuring range and high measuring precision. The method can meet measurement needs of large-caliber gun projectile falling point on the sea.
sea projectile point; acoustics measurement; water acoustic features
1671-7449(2016)06-0506-05
2016-05-20
刘德耀(1963-),男,高级工程师,硕士,主要从事舰炮系统试验技术工作.
TJ306
A
10.3969/j.issn.1671-7449.2016.06.010
猜你喜欢
舰船科学技术(2022年10期)2022-06-17 06:28:04
军事文摘(2021年16期)2021-11-05 08:49:08
军事文摘·科学少年(2021年8期)2021-09-10 21:28:31
空间科学学报(2021年6期)2021-03-09 06:20:16
装备制造技术(2019年12期)2019-12-25 03:07:32
电子制作(2017年22期)2017-02-02 07:10:34
电子制作(2017年19期)2017-02-02 07:08:28
系统工程与电子技术(2016年7期)2016-08-21 13:59:18
太空探索(2016年12期)2016-07-18 11:13:43
新闻传播(2016年4期)2016-07-18 10:59:21