
压电微喷辅助液滴的多物理场耦合与实验
2016-12-23 01:27范增华荣伟彬王乐锋孙立宁
西安交通大学学报 2016年11期
范增华,荣伟彬,王乐锋,孙立宁
(1.山东理工大学机械工程学院,255049,山东淄博;2.哈尔滨工业大学机器人技术与系统国家重点实验室,150080,哈尔滨)
压电微喷辅助液滴的多物理场耦合与实验
范增华1,2,荣伟彬2,王乐锋2,孙立宁2
(1.山东理工大学机械工程学院,255049,山东淄博;2.哈尔滨工业大学机器人技术与系统国家重点实验室,150080,哈尔滨)
针对微对象辅助释放的操作液滴需求,基于压电驱动的方法进行辅助液滴的分配控制,设计了压电微喷分配器,利用单脉冲压电激励实现非接触式分配,分析了单液滴的形成条件。基于多物理场法,建立压电微喷液滴的多物理场耦合模型,包括压电设备、流固耦合、层流和两相流模型,以此模拟液滴的形成进程,并分析影响液滴形成能力的因素。在构建的微操作系统平台上进行实验分析,结果表明,分配液滴的体积随着驱动电压的幅值和脉冲宽度的增大而增大,较大的参数值利于单液滴形成,与仿真结果分析一致。通过对控制参数的复合调节,所设计的分配器可分配3.5 nL的最小液滴,满足微对象辅助释放的操作液滴要求。直径为200 μm的锡球和聚苯乙烯微球的辅助释放任务的实施,验证了所提出的方法和研制工具的有效性。
微操作;压电驱动;微喷;液滴;多物理场
微机电系统的发展促使操作构件日益微型化,质量轻、黏附力大的特性对微对象的可靠、无损操作提出了更高要求。微对象凸显的尺寸效应使黏着力相对于重力起到主导作用,拾取后的微对象易黏附在操作工具的末端,不能单依靠自身的重力而脱落[1-3],需借助外源作用力打破黏着平衡,实现释放。基于液滴毛细力的辅助释放方法具有操作柔顺性,能够避免表面应力集中,且具有自校准功能,并适应形状复杂零件的操作[4-6]。然而,辅助液滴的获取则是毛细力辅助释放实施的先决条件。
Obata等人针对基于辅助液滴的微对象释放策略,建立了毛细力释放模型,从理论上分析满足成功释放的条件,验证了所提出方案的可行性[7]。Chang等人利用超声波加湿器产生喷雾,在待释放基底上喷洒大量辅助液滴,实现了200 μm×200 μm×70 μm SU-8微芯片的释放和自校准定位[8-9]。Fuchiwaki等人将操作探针浸润在液体管道内,利用探针伸出管道后的末端残留液滴作为辅助液滴分配的初始条件,使辅助液滴接触基底并产生液桥,然后提升探针至液桥断裂,残留在基底上的液滴作为辅助释放的液滴条件,但只能被动地改变操作探针的尺寸和形状来控制所需液滴的体积[10]。
在微定位和控制方面,压电致动器具有响应速度快、控制精度高、功耗低等优点[11]。路士州和刘亚欣等人面向高黏度胶体分配,研制了基于压电驱动的撞针式喷射阀,并对喷射系统进行了仿真和实验研究[12-13]。在前述研究的基础上,本文基于压电驱动的单液滴分配方法,研制了压电式辅助液滴分配器;基于多物理场法建立压电微喷辅助液滴的多物理场耦合模型,分析了影响液滴形成能力的因素;最后实验并讨论了驱动参数(电压幅值和脉冲宽度)对液滴形成的影响,通过辅助释放实验验证了所提出方法和研制工具的有效性。
1 辅助液滴分配器结构和工作原理
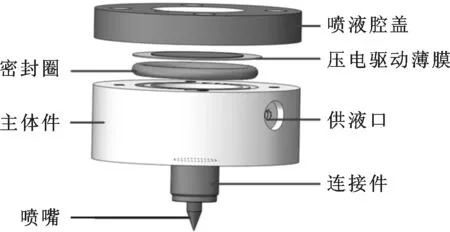
基于压电驱动的辅助液滴分配器的结构组件如图1a所示。主体件加工内腔结构储存待分配液体,主体件的上端开有螺纹孔和密封槽,螺纹孔与喷液腔盖连接;主体件的下端加工NPT螺纹孔,侧面配置供液口,连接外源供液装置,并依靠外源压力调节喷嘴处的初始液面。压电驱动薄膜包括压电陶瓷片和黄铜片,且两者融为一体。密封圈配置在主体件和压电驱动薄膜之间,喷液腔盖和主体件通过螺栓固定后可实现密封。连接件和喷嘴通过胶粘密封,且连接件的上端通过NPT外螺纹与主体件的螺纹孔密封连接,便于依据操作需要更换喷嘴。所有组件装配后,外源液体流经内部通道,直至喷嘴处。
基于压电驱动的辅助液滴分配器的工作原理如图1b~1d所示。在准备阶段调节喷嘴出口处的液面,使其处于临界喷射状态(见图1b)。压电驱动薄膜在激励电压的作用下产生变形,并压缩腔内的待分配液体,产生的压力波传递至喷嘴出口处,形成一定的流速,将液滴挤出喷嘴(见图1c)。流速产生的惯性力和颈缩最终形成单个液滴,并脱落在基底上(见图1d)。通过改变驱动信号的参数配置,可调控液滴的形成,单液滴的非接触分配创造了微对象辅助释放的先决条件。
(a)结构示意图

(b)准备 (c)液滴形成 (d)脱落图1 分配器的结构和工作原理
2 辅助液滴分配的多物理场耦合模型
2.1 多物理场模型配置
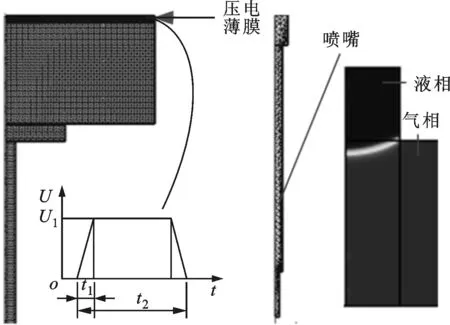
流体在分配器内流经多个设备器件,涉及气、液、固三相间的相互作用以及液相间的层流作用。针对液滴的形成能力开展研究,结合压电微喷器的结构配置,建立液滴分配的多物理场耦合模型如图2所示。鉴于整体设备组件的结构对称,为简化计算,所建模型为二维轴对称形式,主要包括压电设备模型、流固耦合模型、层流模型和两相流模型,液滴的形成是多物理场复合作用的结果。
单液滴形成的驱动源来自压电薄膜施加单脉冲激励信号后的变形,如图2a所示。定义压电陶瓷挤压黄铜的变形d=[xyz],则设备结构的运动方程如下式所示
(1)
式中:ρ为材料的密度;t为作用时间;Fv为变形前所受的体积力;σ为变形后产生的应力。
(a)压电设备和流固耦合 (b)层流 (c)两相流 图2 多物理场耦合模型
对于受到压力冲击下流体的运动,可用速度场v=[uωε]和压强p来描述。假设流体不可压缩,则其动量方程和质量守恒方程分别如式(2)和式(3)所示
(2)

(3)
式中:ρ为流体密度;F为外源力;μ为动力黏度。
基于多物理场耦合模型,在COMSOL环境下求解并描述流体的运动,进而获取分配器设备模型所需的液滴生成条件。图2a中将压电设备和流固耦合模块进行全耦合,可将压电设备的输出变形实时加载至流固耦合模块,并对其求解域采用四边形映射网格划分,有助于减少网格的翻转。鉴于管路的长度,为更精确描述流体的运动,在流固耦合和两相流之间增加了层流模块,采用自由三角形进行网格划分,并将流固耦合模块的出口流速施加到层流入口处,如图2b所示。液滴最终形成的计算域通过两相流模型描述,考虑气-液界面在液滴形成过程中的不断变化,采用自适应网格法划分两相流作用域。在多物理场仿真环境内对气相含率(体积分数)φ进行如下定义:φ=0代表在液相内;0<φ<1表示自由面(气-液界面);φ=1代表在气相内。图2c为初始化后喷嘴出口处的气、液相分布。
2.2 微喷液滴形成分析
外力的作用使流体能够流出喷嘴,但若形成单个脱落液滴,出口处的流速需达到一定的值,满足如下式所示的单液滴喷射的速度条件[14]
(4)
式中:We为韦伯数;ρ为流体密度;D为喷嘴内径;v为喷嘴出口处流速;γ为流体表面张力系数。
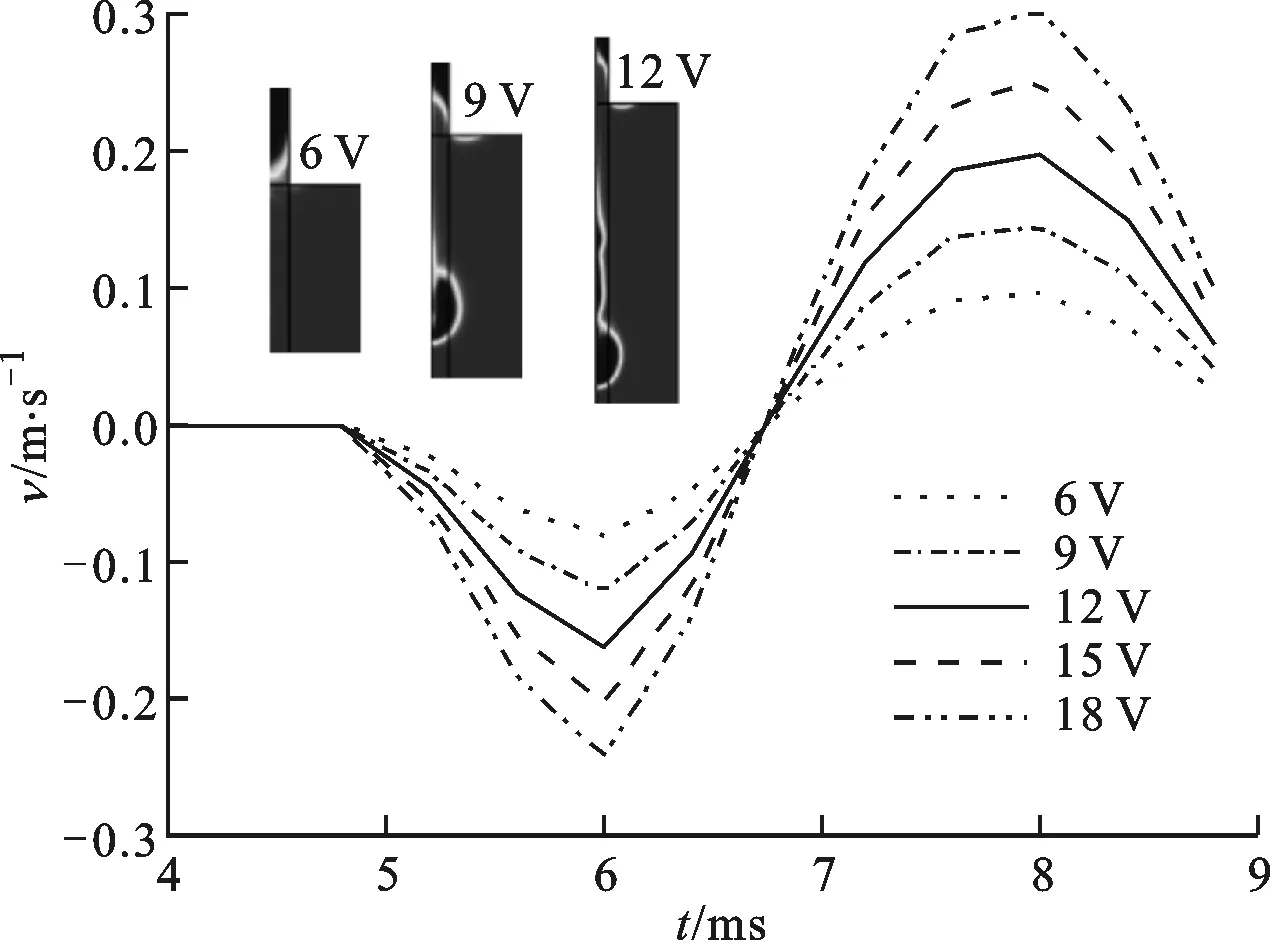
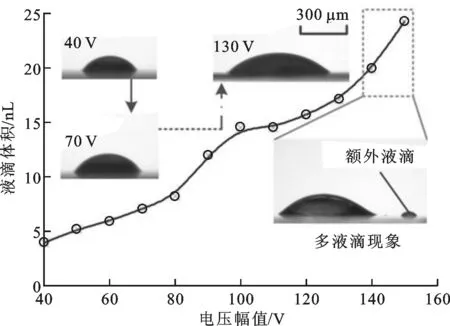
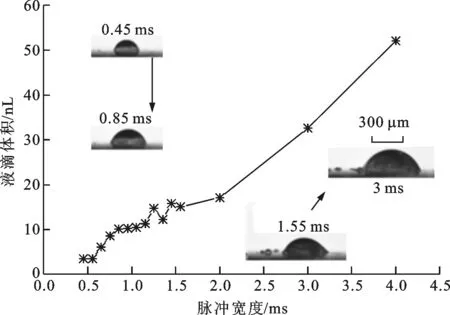
为避免辅助液滴与微对象接触后造成的额外污染,本文选择去离子水作为流体介质进行仿真分析,与实验分析中的介质一致。喷嘴内径为150 μm,流体的表面张力系数为0.071 84 N/m,计算得到该参数配置下单液滴形成的流速条件为2.39 m/s 通过调试驱动源模块(压电设备模块)的参数,借助多物理场耦合的流体运动模型,可模拟单液滴的形成。图3是在幅值为9 V,脉冲宽度为1.8 ms,上升、下降沿时间为0.8 ms的单脉冲信号驱动下单液滴的形成过程:驱动信号施加后,速度逐渐增大,流体在外力作用下不断流出(t=6 ms),此时流出喷嘴的液体呈现柱状;速度达到最大值后开始减小并反向增大,流出的柱状液滴开始产生颈缩(t=6.5 ms);最后,在流速惯性力和颈缩的双重作用下,单个液滴形成并离开喷嘴、脱落(t=7 ms)。在该参数配置下,对应模型喷嘴出口处的最大流速为2.85 m/s,大于单液滴形成的理论临界流速2.39 m/s,满足单液滴形成的条件。仿真结果的一致性验证了所建立的多物理场耦合模型对液滴形成模拟的有效性。 图3 多物理场耦合下的液滴形成 进一步分析了驱动电压幅值对辅助液滴形成能力的影响。图4为不同电压幅值下流速的变化和液滴的形成情况,随着电压幅值的增加,喷嘴出口处的最大流速增大,不同幅值下流速的变化趋势基本一致。 图4 不同电压幅值下的流速变化 电压幅值为6 V时,模型出口处的最大流速为1.9 m/s,未满足液滴的形成条件(2.85 m/s),不能形成流出液滴。较大电压幅值(9 V)利于液滴的形成和喷射,但过大的电压幅值(12 V)产生的较大流速会造成液滴的拖尾现象。随着电压幅值的增大,该现象愈明显,且会产生卫星液滴,即额外液滴的出现。若保证单液滴的稳定形成,需控制合理的脉冲电压幅值。液滴形成的多物理场模型的建立和液滴形成能力的仿真分析为进一步的实验研究提供了有效指导。 3.1 实验装置 加工压电微喷辅助液滴分配器,并构建实验测试系统,对所设计分配器的辅助液滴分配能力进行实验研究。图5为装配后的测试装置,主要包括视觉模块、运动模块、分配器模块和外源供液模块。 图5 实验装置 视觉单元包括2个相互垂直安装的显微镜,可观测液滴的形成进程,并通过上位机显示实时信息和采集数据。运动模块的3组三自由度位移平台可实现操作进程中2个显微镜和分配器的位置定位。装配后的分配器模块在压电陶瓷获得激励信号后,通过喷嘴分配辅助液滴至基底上。外源装置的升降电机和储液瓶可为分配器提供液体,并调节初始状态时喷嘴处的液面。 3.2 驱动信号对辅助液滴形成能力的影响 在分配器结构(喷嘴内径为150 μm)和分配液体(去离子水)确定的情况下,驱动脉冲信号参数直接决定了辅助液滴的形成能力,主要对驱动电压的幅值和脉冲宽度进行了实验分析。图6为驱动电压幅值对基底辅助液滴体积的影响,脉冲宽度恒为1.2 ms,通过图像处理(二值化-边缘检测-边缘拟合-数据处理)获取分配液滴的体积,并对实验结果进行B样条拟合。 图6 电压幅值对液滴体积的影响 实验结果表明:电压小于40 V时不能分配出液滴,大于仿真分析的参数值,因为实际中流体的流动并非理想状态,微尺度下表面张力和管路粗糙度等因素均会增加流动阻力,故需要较大的驱动电压。其影响因素和出现的现象与仿真分析中一致,随着驱动电压幅值的增加液滴的体积增大,当电压幅值较大时,会出现多液滴分配现象,即在主液滴的旁边出现额外液滴。究其原因主要包括:一是较大速度的液滴撞击基底后,分散出现额外液滴;二是较大的驱动电压会产生液滴拖尾,并伴随卫星液滴出现,与仿真结果中出现的现象一致。驱动电压幅值过大时,由于毛细管较大的变形,在恢复时会将空气带入管内,产生气泡,限制了操作液滴的稳定分配。 除了电压幅值,脉冲宽度也是影响液滴形成的重要因素,在脉冲电压幅值为80 V的情况下,图7为脉冲宽度对分配液滴体积的影响。随着脉冲宽度的增大,液滴的体积增大,其变化率在初始阶段较小,且没有额外液滴出现(0.45 ms),当脉冲宽度增大至1.55 ms后,体积变化率加快,且会出现较多的额外液滴。 图7 脉冲宽度对液滴体积的影响 在辅助液滴的释放进程中,若液滴较大则会包裹释放后的微对象并发生移动,破坏释放精度。为了提高释放的精确性,需获取较小体积的辅助液滴,由此进一步分析了该分配器的最小液滴获取能力。 上述分析可知,液滴的形成是多参数复合作用的结果,驱动信号的电压幅值和脉冲宽度均影响辅助液滴的获取能力。图8为不同电压幅值下最小液滴的体积变化及其对应的脉冲宽度。实验结果表明:不同电压幅值下的最小液滴体积的平均值约为3.5 nL,相应地获取最小液滴的脉冲宽度则随着电压幅值的增大而减小,且在初始阶段的变化速度较快,然后趋向平缓。 图8 最小液滴的获取能力 3.3 微对象辅助释放实验 通过对压电微喷分配器辅助液滴获取能力的实验分析表明,相对于喷雾式的多液滴无规则分配和浸润式探针的被动液滴获取,所设计的分配器可实现毛细力辅助单液滴的非接触式主动分配,并可动态控制分配液滴的大小。在此基础上,利用研制的分配器对辅助释放任务进行了测试实验。图9为微对象辅助释放进程,测试的微对象是直径为200 μm的锡球和聚苯乙烯微球。 (a)黏附 (b)液滴分配 (c)释放 (d)液桥蒸发 (e)液桥消失 (f)聚苯乙烯微球图9 微对象辅助释放进程 采用真空吸附的方式拾取微球对象,关于真空吸附的黏着问题已在前述工作中进行了研究[15],由于微尺度下黏着力的主导作用,微对象在拾取后不能自然脱落,如图9a所示。在此基础上,利用研制的分配器在待释放位置分配辅助液滴,如图9b所示。将直径为200 μm的锡球微对象移至待释放位置区域,并与辅助液滴接触,依靠微对象与辅助液滴形成的液桥力可克服微对象与操作工具间的黏着力,实现黏着微对象的释放,如图9c所示。微对象释放后,辅助液滴逐渐蒸发,如图9d所示,直至完全消失干净(见图9e),可避免辅助液滴对微对象的表面污染。基于同样的操作策略,对直径为200 μm的聚苯乙烯微球也进行测试实验,均可实现可靠释放,如图9f所示。操作实验初步验证了所研制的分配器对微对象柔顺辅助释放任务的有效性,为进一步实验分析辅助释放性能奠定了基础。 本文基于压电微喷的方法实现微对象辅助释放中操作液滴的获取,设计了压电微喷辅助液滴的分配器,根据分配器的流体路径,建立了多物理场的压电微喷耦合模型。理论和仿真结果表明,喷嘴出口流速大于2.39 m/s时该分配器可实现单个液滴形成,驱动电压的幅值越大越有助于液滴的获取。实验结果表明该方法可实现单液滴的非接触式分配,驱动电压的幅值和脉冲宽度对分配液滴的体积有较大影响,控制参数的复合作用可获取不同体积的辅助液滴。调节不同电压幅值下的脉冲宽度,该分配器可实现3.5 nL最小液滴的分配。辅助释放测试实验表明,借助所研制的分配器可实现直径为200 μm的锡球和聚苯乙烯微球的顺利释放,为柔顺微操作机器人系统的集成和辅助释放精度的进一步研究提供了基础保障。 [1] CHEN B K, ZHANG Y, SUN Y. Active release of microobjects using a MEMS microgripper to overcome adhesion forces [J]. Journal of Microelectromechanical Systems, 2009, 18(3): 652-659. [2] CECIL J, POWELL D, VASQUEZ D. Assembly and manipulation of micro devices: a state of the art survey [J]. Robotics and Computer-Integrated Manufacturing, 2007, 23(5): 580-588. [3] FAN Zenghua, RONG Weibin, WANG Lefeng, et al. A single-probe capillary microgripper induced by dropwise condensation and inertial release [J]. Journal of Micromechanics and Microengineering, 2015, 25(11): 115011. [4] AL AMIN A, JAGTIANI A, VASUDEV A, et al. Soft microgripping using ionic liquids for high temperature and vacuum applications [J]. Journal of Micromechanics and Microengineering, 2011, 21(12): 125025. [5] FAN Zenghua, WANG Lefeng, RONG Weibin, et al. Dropwise condensation on a hydrophobic probe-tip for manipulating micro-objects [J]. Applied Physics Letters, 2015, 106(8): 084105. [6] SHAH A, CHANG B Y, SUIHKONEN S, et al. Surface-tension-driven self-alignment of microchips on black-silicon-based hybrid template in ambient air [J]. Journal of Microelectromechanical Systems, 2013, 22(3): 739-746. [7] OBATA K J, MOTOKADO T, SAITO S, et al. A scheme for micro-manipulation based on capillary force [J]. Journal of Fluid Mechanics, 2004, 498: 113-121. [8] CHANG B, SARIOLA V, JAASKELAINEN M, et al. Self-alignment in the stacking of microchips with mist-induced water droplets [J]. Journal of Micromechanics and Microengineering, 2011, 21(1): 015016. [9] CHANG B, SHAH A, ROUTA I, et al. Surface-tension driven self-assembly of microchips on hydrophobic receptor sites with water using forced wetting [J]. Applied Physics Letters, 2012, 101(11): 114105. [10]FUCHIWAKI O, KUMAGAI K. Development of wet tweezers based on capillary force for complex-shaped and heterogeneous micro-assembly [C]∥2013 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ, USA: IEEE, 2013: 1003-1009. [11]张春林, 张希农, 陈杰, 等. 菱形微位移压电作动器的输入输出线性建模 [J]. 西安交通大学学报, 2014, 48(5): 102-106. ZHANG Chunlin, ZHANG Xinong, CHEN Jie, et al. Linear modeling for input-output relations of a rhombic micro-displacement piezoelectric actuator [J]. Journal of Xi’ an Jiaotong University, 2014, 48(5): 102-106. [12]路士州, 刘亚欣, 姚玉峰, 等. 压电驱动撞针式微喷系统的键合图建模 [J]. 西安交通大学学报, 2014, 48(1): 133-138. LU Shizhou, LIU Yaxin, YAO Yufeng, et al. Bond graph modeling of needle typed jet dispensing system driven by piezoelectric actuator [J]. Journal of Xi’ an Jiaotong University, 2014, 48(1): 133-138. [13]刘亚欣, 赵亚涛, 路士州, 等. 压电驱动撞针式高黏性胶体微喷系统的研制 [J]. 西安交通大学学报, 2015, 49(6): 90-95. LIU Yaxin, ZHAO Yatao, LU Shizhou, et al. Research on needle-type micro jet dispensing systems driven by piezoelectric actuator for high viscous liquids [J]. Journal of Xi’ an Jiaotong University, 2012, 31(8): 130-135. [14]KOLTAV P, ZENGERLE R. Non-contact nanoliter & picoliter liquid dispensing [C]∥Solid-State Sensors, Actuators and Microsystems Conference. Piscataway, NJ, USA: IEEE, 2007: 165-170. [15]RONG Weibin, FAN Zenghua, WANG Lefeng, et al. A vacuum microgripping tool with integrated vibration releasing capability [J]. Review of Scientific Instruments, 2014, 85(8): 085002. (编辑 荆树蓉) Multi-Physics Coupling Analysis and Experiments on Piezoelectric Micro-Jet of Auxiliary Droplets FAN Zenghua1,2,RONG Weibin2,WANG Lefeng2,SUN Lining2 (1. School of Mechanical Engineering, Shandong University of Technology, Zibo, Shandong 255049, China;2. State Key Laboratory of Robotics and System, Harbin Institute of Technology, Harbin 150080, China) To satisfy the manipulation requirement of auxiliary droplets release aiming at micro-objects, a droplet dispensing method based on piezoelectric drive is presented. The dispenser of piezoelectric micro-jet, which employs piezoelectric actuator to achieve non-contact dispensing, is designed. Accordingly, the formation condition of single droplet is analyzed. Subsequently, a multi-physics coupled model of piezoelectric micro-jet, including piezoelectric device model, fluid-solid interaction model, laminar flow model, and two-phase flow model, is established to simulate the process of droplets formation and analyze the factors affecting the droplet formation capacity. Experimental tests were conducted on a customized micromanipulation platform to verify the performance of the micro-dispenser. Experimental results indicate that the droplet volume increases with the driving voltage and pulse width. Meanwhile, the single droplet forms more easily with higher driving voltage and larger pulse width, and the results are consistent with simulation. Through the comprehensive adjustment of control parameters, the minimum drop volume of 3.5 nL, which is sufficient for micro-object auxiliary release, can be obtained using the designed micro-dispenser. The feasibility of the proposed method and the fabricated micro-dispenser were verified by the manipulation of tin and polystyrene microspheres with a diameter of 200 μm. micromanipulation; piezoelectric drive; micro-jet; droplet; multi-physics 2016-05-12。 作者简介:范增华(1986—),男,讲师;荣伟彬(通信作者),男,教授,博士生导师。 基金项目:国家自然科学基金创新研究群体科学基金资助项目(51521003);机器人技术与系统国家重点实验室(哈尔滨工业大学)自主研究课题(SKLRS201602C)。 时间:2016-07-18 10.7652/xjtuxb201611009 TP24 A 0253-987X(2016)11-0056-06 网络出版地址:http:∥www.cnki.net/kcms/detail/61.1069.T.20160718.0908.002.html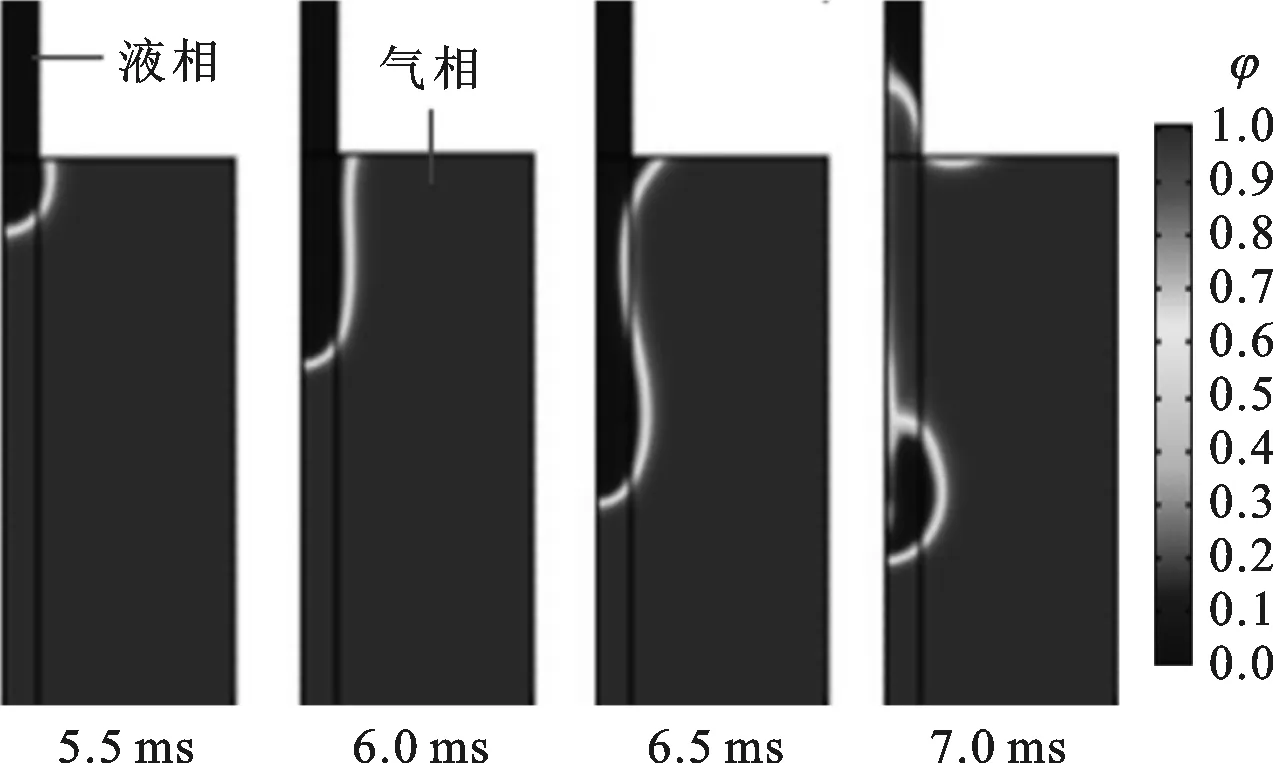
3 实验与结果




4 结 论
猜你喜欢
力学学报(2022年2期)2022-03-20
陶瓷学报(2021年3期)2021-07-22
演艺科技(2020年5期)2020-11-29
原子能科学技术(2020年1期)2020-03-30
铜仁学院学报(2018年6期)2018-07-05
三联生活周刊(2017年33期)2017-08-11
火控雷达技术(2016年1期)2016-02-06
原子能科学技术(2015年1期)2015-03-20
振动、测试与诊断(2014年6期)2014-03-01
振动、测试与诊断(2014年6期)2014-03-01
