
浅谈电动汽车CAN总线通信设计
2016-12-22 03:15胡艳峰王斌邹利宁唐键
汽车电器 2016年11期
胡艳峰,王斌,邹利宁,唐键
(陕西重型汽车有限公司,陕西西安 710200)
浅谈电动汽车CAN总线通信设计
胡艳峰,王斌,邹利宁,唐键
(陕西重型汽车有限公司,陕西西安 710200)
简述电动汽车CAN通信设计过程;介绍网络拓扑结构规划、整车高压上电逻辑、标识符分配、节点能力状态反馈信号以及网络仿真。
电动汽车;CAN总线;通信设计
目前,CAN总线技术是广泛应用于汽车的总线技术之一,涉及到轿车、客车、载货汽车以及特种车等多种车型,这些车型可以是传统的燃油汽车,也可以是替代能源的汽车以及电动汽车。基于清洁能源及环境保护的需要,电动汽车将会在人类生活中扮演越来越重要的角色。电动汽车中各类ECU比传统汽车更多,CAN总线技术的应用更是不可或缺。本文主要根据笔者工作中的经验,和大家分享对CAN总线通信设计的一些理解,希望对各位读者能有一定的帮助。
1 电动汽车通信设计概述
首先介绍电动汽车的配置,电动汽车通常的节点及其功能见表1。实际车型的配置情况应具体情况具体分析。
通信设计的工作主要为[1]:①了解整车架构,主要是哪些节点通过CAN网络通信;②熟悉整车电器原理,包括低压部分和高压部分;③根据控制需求及节点通信需求确定各节点收发信号;④信号封装成报文,给出通信方式及ID;⑤计算各个节点占用网络负载率;⑥网络拓扑结构确定;⑦单节点仿真及总线网络仿真;⑧根据仿真结果,修改不合理的设计。
经过上述的设计过程,车辆的CAN网络通信设计就算完成了。设计工作完成之后,剩下的就是实车验证,实车验证是检验网络通信设计是否合理的最终标志。

表1 电动汽车节点及其功能
2 网络拓扑结构规划
网络拓扑结构是通信设计的一项重要内容,它体现了整车CAN网络架构,是合理规划、调配整车节点的一个重要手段。网络拓扑结构也是低压电线束设计的一个基础参考文件。那么网络拓扑结构规划要从哪几个方面来着手呢?
2.1 节点通信需求
周期性发送的报文通信周期的定义,一方面要考虑节点或信号对于刷新速度的要求,另一方面要兼顾到网络的负载率。一般来说,网络设计时要尽量避免高速度的刷新,因为这将占用很大的网络负载率,从而导致整体负载率上升,进而产生诸多不利的影响。
每个CAN网络节点都有自己的通信要求。例如周期发送的报文,驱动电机要求的周期刷新速率就比较高,一般要求周期10ms;电池管理系统对信号的刷新速率要求相对慢一些,周期一般100 ms或200 ms就可以满足要求。因此,在规划网络拓扑结构时,首先要考虑的就是各个节点自身的通信要求。一般原则是,对于通信周期速率要求较高的节点,以及和车辆安全性息息相关的节点,应考虑放在同一网段上或单独各自成一个子网。
2.2 总线负载率
总线负载率是通信网络上各个信息帧占用总线百分比之和。网络负载率的考虑主要是基于防止网络由于负载率过大而导致的报文丢帧以及漏发现象。对于网络负载率的要求,由于车辆的CAN网络系统都是主机厂根据某款车型具体研发,因此没有统一的标准。国外由于汽车CAN总线起步较早,经验丰富,有的主机厂网络负载率可以高达70%,并且仍能保证车辆CAN网络的高效、稳定运行。国内目前尚达不到这个水平,一般情况下,国内车辆的网络负载率一般不大于30%。随着CAN总线系统开发经验的丰富,这个数值也将会随之变大。
除了上述节点的通信需求外,网络负载率也是网络拓扑规划时要考虑的一个重要因素,同时它也是一个考察设计网络是否合理的一个重要参数。在了解节点通信需求后,根据通信需求计算出各个节点的占用负载率,然后根据一般不大于30%的原则,合理规划CAN通道的数量。如果所有节点的占用负载率之和小于30%,可以考虑将所有节点放在同一个CAN通道上;如果所有节点的占用负载率之和大于30%,就要考虑规划2个或多个CAN通道,且尽量做到每个CAN通道的负载率不大于30%。
关于负载率的计算,这里介绍一种计算方法[2],假设有2个报文,报文1和报文2都以100kb/s波特率进行传输,见表2。
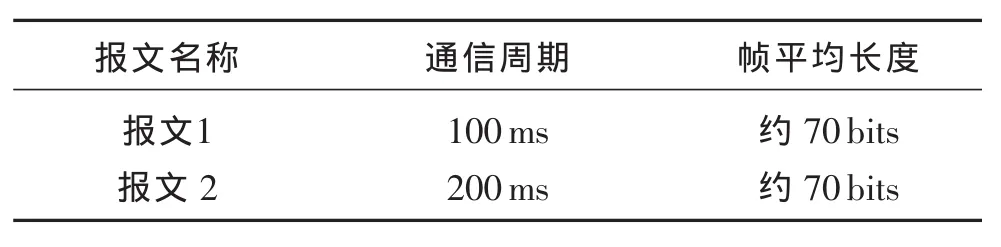
表2 2个传输报文
每秒传输的报文个数为(1000/100)+(1000/200)= 10+5=15个每秒钟最大传输的数据位数为15×70=1050bits负载率计算为1050/100000×100%=1.05%
2.3 网段划分
CAN总线的传输速率最高可达1 Mb/s。ISO11898根据传输速率将CAN总线分为高速CAN总线和低速CAN总线两种。当CAN总线的传输速率大于40kb/s小于等于125 kb/s时,称之为低速CAN总线;当CAN总线的传输速率大于125kb/s(最高可达1Mb/s)时,称之为高速CAN总线。因此,根据要求的传输速率不同,要相应地将高速段和低速段分开。目前,由于使用低速CAN总线的情况已经很少,因此通常我们会根据节点的性质而进行网段的划分,比如车身CAN总线、动力CAN总线、舒适CAN总线、娱乐CAN总线等。
2.4 网关设计
当对节点的通信要求、网络负载率、网段划分都考虑之后,若需要不止一条CAN总线时,这时候就要有网关了。网关允许数据在不同的子网络间,按照不同的协议传送。从一个子网向另一个子网传送数据消息时,网关提供了将参数重新封装到一个新的消息的功能,即网关的作用是在多条CAN总线上起一个协调作用,它可以和所有的CAN子网进行通信,并将消息在各子网之间进行传递,即网关的一个转发过程。
网关有集成网关和独立网关两种类型[3]。所谓集成网关,即选择一个CAN网络上的节点作为网关,该节点除了要完成节点本身的功能外,还要负责作为网关完成不同网段之间的信息转发、交互。独立网关,即不使用CAN网络上的节点作为网关,而是选取一个独立的设备作为网关,只负责不同网段之间的信息交互即可。基于集成网关的网络总线架构取决于集成网关的CAN通道的数量,而且随着网络上CAN控制器逐渐增多,网络上会出现网络负载率过大的现象,影响通信品质。基于独立网关的网络总线架构,便于扩展,但成本会相应增大。
在具体项目中,到底是选择集成网关还是独立网关,需要具体情况具体分析,根据项目需要来选择。
3 整车高压上电逻辑
电动汽车通信设计中要涵盖高压上电逻辑,其主要目的是为整车控制策略做好基础。只有在通信中根据整车高压上电的逻辑规划好相应需要的信号,整车控制时才有可能在这些规划好的信号的基础上得以实现。通信设计中包含的东西很多,高压上电设计就是其中一个。高压上电的命令要求一般由整车控制器来发出,网络中某个节点来执行完成高压上电动作。因此通信设计时首先要清楚高压上电逻辑。下面就某车型的高压上电设计来说明。
图1为某车型集成控制器中高压上电预充电电路示意图。该集成控制器集成了驱动电机系统以及辅助电机系统(包含电动转向、电动制动、DCDC等),并实行了分开的高压上电策略,即由KM1、KM2、R1组成了驱动电机系统的高压上电预充电电路,由KM3、KM4、R2组成了辅助电机系统的高压上电预充电电路。在与供应商沟通的过程中了解到,集成控制器中的驱动电机系统控制两路预充电电路完成预充电功能,即它是该车型整车高压上电的动作执行者。在此车型中,要完成高压上电,即要同时完成驱动电机系统及辅助电机系统这两路高压上电。搞清楚这些后,我们就可以设计高压上下电的通信,见表3。
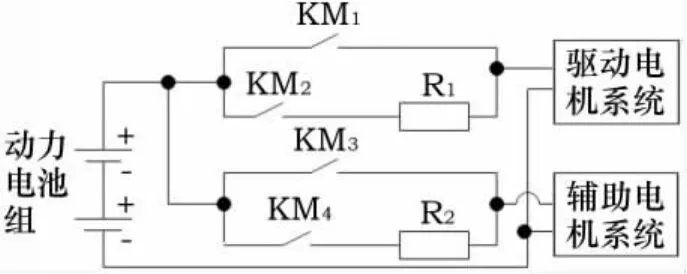
图1 预充电示意图

表3 高压上下电通信设计方案一
在这种通信设计中,整车控制器发送高压上电命令,集成控制器负责完成高压上电过程。在此以驱动电机预充电电路为例说明高压上电过程。当整车控制器发送高压上电命令后,集成控制器将首先闭合预充电接触器KM2,进行预充电;预充电完成后,闭合主接触器KM1,再断开预充电接触器KM2,完成高压上电。
当然高压上电过程我们也可以设计通信,见表4。
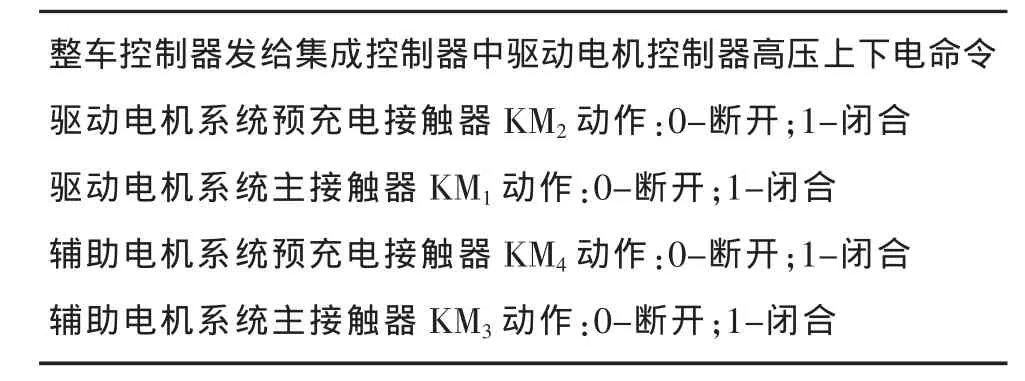
表4 高压上电通信设计方案二
在这种通信设计中,整车控制器将完全控制高压上电的过程,即整车控制器决定何时闭合预充电接触器开始预充电、何时断开预充电接触器完成预充电以及何时闭合主接触器,而集成控制器中的电机控制器在这里仅仅是接触器动作的执行者。
4 标识符(ID)分配
客车、载货汽车采用的都是29位标识符,遵循SAE J1939标准,该标准对CAN2.0B进行了重新定义。重新定义中,29位标识符(ID)的分配见表5。

表529 位标识符分配
在表5中,PRIORITY为优先级,占3位,可以有8个优先级;R为预留位,一般固定为0;DP为数据页,一般固定为0;PF为报文的代码,占8位;PS为目标地址或组扩展,占8位;SA为源地址,占8位。
4.1 优先级
CAN数据帧的优先级遵循CAN2.0B。CAN标识符的值决定了消息的优先级,标识符的值越小,优先级越高。即较小值(29位标识符均为0)具有最高优先级,最大值(29位标识符均为1)的优先级最低。SAE J1939对CAN2.0B的重新定义中,29位标识符中,优先级占高3位,消息优先级可从最高0(0002)设置到最低7(1112)。SAE J1939中规定,所有控制消息的缺省优先级是3(0112),其他所有信息、专用、请求和ACK消息的缺省优先级是6(1102)。实际中,优先级是可以根据实际情况进行调整。例如当定义新的参数组编号,或总线上通信量发生变化,或为了避免同一优先级报文数太多而引起的激烈竞争时,可以对优先级进行升高或降低。
需要注意的是,在实际计算用十六进制表示优先级的时候,R和DP也要参与到计算优先级里面。下面给出优先级对应表,见表6。
例如Pri=3,优先级3位+R+DP=(011002),(011002)=(C16)。
4.2 PDU
PDU(Protocol Data Unit),协议数据单元,是一种特定的CAN数据帧格式。SAE Jl939协议数据单元由7部分组成,分别是优先级、保留位、数据页、PDU格式、特殊PDU(可作为目标地址、组扩展或专用)、源地址和数据场。

表6 优先级对应表
PF(Protocol Data Unit Format),协议数据单元格式。29位标识符中的一个8位数据域,用于识别协议数据单元的格式,并且全部或部分用作参数组的标号。另外,它还是PGN的一个域。
PS(PDU Specific),特定协议数据单元。29位标识符中的一个8位数据域,其具体定义由协议数据单元格式(PF)的值决定。该域可能是表示目标地址(DA),也可能是组扩展(GE)。另外,它还是PGN的一个域。
SAE J1939共定义了2种PDU格式,PDU1格式(PS为目标地址)和PDU2格式(PS为组扩展),见表7。其中PDU1格式实现CAN数据帧定向到特定目标地址(设备)的传输,PDU2格式仅用于不指向目标地址(设备)的CAN数据帧的传输。

表7 2种PDU格式
SAE J1939中规定PDU2格式中值为255的PF(即上述的保留位为0,数据页为0)留作专用。在此情形下,特定PDU段留给制造商定义使用。专用B的PGN值在FF00~FFFF即65280~65535范围之内。
4.3 PGN
PGN,即Parameter Group Number,参数组编号,3字节,24位,包括预留位、数据页位、PDU格式和组扩展域等。参数组编号是唯一标识的一个参数组。通俗来讲,PGN用于区分CAN报文。上述提到,专属B的PGN值在65280~65535(十六进制为FF00~FFFF)是留给制造商定义使用,因此电动汽车PGN分配时通常选的就是这个范围。
例如,电池管理系统BMS发给整车控制器VMS的报文有3个,命名报文名称为BMS2VMSA、BMS2VMSB、BMS2VMSC,这3个报文的PGN可以按表8设定。

表8 PGN设定
4.4 源地址
SAE J1939的29位标识符中,源地址域占8位,这是确保网络中的唯一性原则制定,是确保CAN标识符符合CAN协议中的唯一性要求。通俗来讲,源地址用于区分不同的节点。源地址可以通过依次排列编号来实现,与消息的优先级、更新速度或者重要性无关。SAE J1939为公路设备预留的源地址区间为208~227,因此可以在此区间内为电动汽车特有的节点分配地址。这里需要注意的是,有些节点虽然在电动汽车中是常用节点,但是SAE J1939给公路设备规定的源地址中已经有了相应的规定,因此在网络设计时进行节点源地址分配时可以直接使用,具体见表9。
5 节点能力状态反馈信号
在此要特别提醒下一类信号,通信设计及控制中有时候往往会被忽略但却非常重要的一类,这类信号即反映零部件当前能力状态的反馈信号。举个例子来理解一下,以辅助动力单元APU为例。APU的作用是,在电池电量不足的情况下,开启APU发电给电池充电,从而达到增加整车续驶里程的目的。在这里APU的某一时刻的发电功率就是这里说的当前能力状态反馈信号。这个信号就是要告诉整车控制器所要求的发电功率不能超过APU目前的发电能力,当然也不能远远低于目前的发电能力。若超过,APU实现不了;若远远低于,则没有充分发挥到APU的作用。这类信号的重要性在于,它是真实反映某一时刻零部件能力的标志,是整车控制的一个重要依据。
电动汽车中可能要用到的一些反馈零部件当前能力状态的反馈信号,表10供大家参考。
6 网络仿真
网络仿真是通信设计中不可或缺的一个重要环节,它是验证设计网络是否合理的第1步验证。定义的架构是否合理?报文的收发是否能够没有丢帧地准确进行?在没有实车测试验证之前,网络仿真是必不可少的一个环节。网络仿真应用Vector公司的CANoe软件,CANoe是网络和ECU开发、测试和分析的专业工具。如何进行网络仿真本文不再赘述,很多杂志文章以及网络上都可以找到相关的内容。网络仿真的目的是为了验证设计网络的合理性,包括有无漏发帧数据、网络的负载率等。一旦发现有不合理的地方,可以提前修改,将设计中可能存在的问题在模拟验证中得以消除。
7 结束语
设计工作到此,基本上就算告一段落了。剩下的就是实车验证网络的可靠性及可实行性。本文是笔者在工作中的经验,希望对需要的人能有一定的帮助。
[1]胡艳峰,唐键,邹利宁.基于CANoe的汽车CAN总线通信及诊断设计[J].汽车电器,2015(12):16-20.
[2]CANoe7.2用户手册CANoe_Manual_En[Z].
[3]周红英,陶龙龙.基于独立网关的汽车网络总线系统设计[J].汽车实用技术.2015(4):1-3.
(编辑 陈程)
ElectricVehicle CAN Bus Communication Design
HU Yan-feng,WANG Bin,ZOU Li-ning,TANG Jian
(Shanxi Heavy-duty Automobile Co.,Ltd.,Xi'an 710200,China)
The paper demonstrates the design process of electricVehicle CAN Bus communication;introduces network topological structure planning,high-vault logic onVehicles,identifier distribution,node capability statues feedback signal,and network simulation.
electricVehicle;CAN Bus;communication design
U469.72
A
1003-8639(2016)11-0001-05
2016-03-02;
2016-09-03
胡艳峰(1986-),女,工程师,主要从事汽车总线系统设计及测试工作;王斌(1984-),男,工程师,主要从事汽车电器设计工作;邹利宁(1985-),男,工程师,主要从事汽车电器原理和线束设计工作;唐键(1985-),男,工程师,主要从事汽车电器设计和汽车总线系统设计工作。
猜你喜欢
汽车电器(2022年9期)2022-11-07
电子技术与软件工程(2022年11期)2022-09-09
计算机应用(2022年8期)2022-08-24
煤气与热力(2022年4期)2022-05-23
计算机应用文摘·触控(2022年6期)2022-04-15
中兴通讯技术(2021年5期)2021-11-25
电子制作(2021年4期)2021-06-16
台湾农业探索(2020年4期)2020-10-29
计算机系统应用(2020年8期)2020-03-22
台湾农业探索(2019年5期)2019-09-10
