动力定位操作员适任研究综述
2016-12-21 06:04陈丽宁何淋王新辉唐强荣
航海教育研究 2016年4期
陈丽宁,何淋,王新辉,唐强荣
(1. 广州航海学院 海运学院,广州 510725; 2. 广州航海学院 培训中心,广州 510725)
动力定位操作员适任研究综述
陈丽宁1,何淋1,王新辉2,唐强荣1
(1. 广州航海学院 海运学院,广州 510725; 2. 广州航海学院 培训中心,广州 510725)
首先比较了英国航海学会2007、2012和2014年制定的动力定位操作员的培训和发证规则,指出2014年规则做出的主要修改。进而,对动力定位操作员的海洋工程船培训、穿梭油轮培训的内容、体系进行研究。在此基础上,总结了中国动力定位操作员培训、发证中存在的问题,针对这些问题提出具有建设性的解决方法。
动力定位操作员;海洋工程船培训;穿梭油轮培训;动力定位模拟器
一、引言
船舶动力定位(dynamic positioning, DP)系统是一种闭环控制系统,它通过控制系统驱动船舶推进器来抵消风、浪、流等作用于船上的环境外力, 从而使船舶保持在海平面某要求的位置上。[1]DP船舶广泛应用于铺管、铺缆、采砂、挖泥、潜水支持、海上装载作业、油轮作业等领域。
DP海上作业,是通过DP船船员操纵DP系统及其他船上设备来完成的,因此DP船船员的知识水平和操作技能直接关系到DP作业的安全和效率。DP作业由动力定位操作员(Dynamic Positioning Operator, DPO)、轮机长、值班轮机员、电子员(electro-technical officer, ETO)等协作完成。[2]DPO为DP作业中最为关键的人员,其他船员配合DPO共同完成DP作业。截至2014年,全球约有5000余条DP船,每条1级、2级、3级DP船需要的DPO数量约为8.7人,全球DPO缺口约为18 500人。[3]国内研究人员对DP船舶展开了研究,研究主要集中在DP控制系统[4-6]、传感器信息融合[7-9]、DP测试[10-11]、DP海上作业[12-14]、DP系统故障诊断[15-16]、DP船体结构与布局[17-18]、DP系统滤波器[19]、DP能力[20]、DP模拟器[21-22]等。目前我国尚未有DPO培训、发证的相关法规, DPO适任研究仍处于起步阶段。
国际上DPO的适任培训计划主要由英国航海学会(the Nautical Institute, NI)制定。NI也负责对DPO培训机构授权、监督,以及DPO证书的发放与管理。中国船员要想获得DPO证书,需要到NI授权的培训机构进行培训,培训费用较高。我国作为一个航运大国,应该具有自己的DPO培训、发证的法规和体系,这既能体现我国航运大国的地位,摆脱国外机构的垄断,又有助于我国DP船船队的建设,降低DPO培训成本,促进船员就业。因此,系统地研究DPO适任,对于我国尽早制定符合我国国情的相关法规,并建立独立自主的DPO培训、发证体系,具有重要的意义。
二、DP系统的组成
DP系统由以下部分组成:DPO、船桥操纵台、计算机组、环境测量系统、动力系统、位置参考系统、艏向传感器、推进与推力系统,[23]DP系统的各组成部分关系如图1所示。DPO为DP系统中的核心操作人员。船桥操纵台是供DPO发送和接收数据用的设备,上面放置了所有控制的输入端、按钮、转换开关、指示器、报警器和显示器。船桥操纵台与安装DP控制软件的计算机组相连,计算机组主要负责DP功能,而不负责其他功能。控制单元接收环境测量系统、位置参考系统、艏向传感器等发送的信息,进行数据处理,并发出推进器指令来抵抗环境因素干扰。此外,控制单元还需补偿系统的固有滞后、消除传感器错误信号。
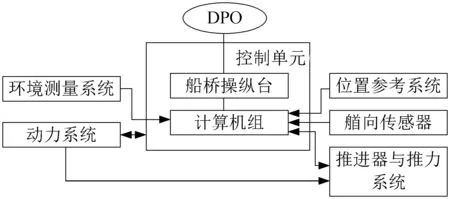
图1 DP系统的组成部分
环境测量系统包括风传感器、垂直参考单元(Vertical Reference Unit, VRU)、运动参考单元(Motion Reference Unit, MRU)。其中,风传感器用于测量风速、风向,VRU和MRU用于测量船舶的横摇、纵摇和垂荡。位置参考系统用于对船舶的位置进行观测,包括卫星定位系统、激光位置参考系统、水声位置参考系统、张紧索系统、微波位置参考系统等。艏向传感器用于测量船艏向,由电罗经、组合传感器和发送型磁罗经(Transmitting Magnetic Compass, TMC)组成。动力系统既需要给推进器和所有辅助系统提供功率,还需要给DP控制单元和测量系统提供功率。动力系统包括柴油机、交流发电机、配电盘、电源管理、功率分配和不间断电源(Uninterruptible Power Supply, UPS)。推进器与推力系统的基本功能是提供反抗环境干扰因素的力和力矩,以便DP船处于规定的作业区内。推进器与推力系统包括主推进器、舵、槽道推进器、全回转推进器等。
显然,为了能够安全、高效地完成DP作业,DPO既要对DP作业的相关知识有足够的了解,还要具备熟练的操作技能、一定的实践经验。这就要求DPO的培训、发证既需要考虑到知识的学习,也要考虑受训人的实际操作能力和海上经验。随着DP技术的不断发展,DPO的适任也应与时俱进、不断调整。
三、NI对DPO适任标准的修改
NI和国际海事组织(International Maritime Organization, IMO)对DPO的适任均有相关规定。NI在2007年[24]颁布了DPO适任培训的标准。2010年,IMO首次将DPO的适任写入STCW公约[25],即STCW公约马尼拉修正案B-V/f部分,但该部分过于简短。NI在2012年[26]对DPO适任标准进行了修改,主要内容与文献[24]基本一致,同时也满足IMO的相关规定。2014年12月,NI对DPO适任标准做出较大修改[27],并在2015年10月对新标准的培训内容进行了更为详细的说明[28]。NI的2014年标准与之前的标准差异较大,主要体现在三方面:DPO培训受训人资质的要求、DPO证书的分类、DPO培训体系。
1. DPO培训受训人资质要求的改变
NI对DPO培训受训人的资质有一定的要求。在文献[24][25]中,要求DPO培训受训人应持有STCW第II/1、II/2、II/3、III/1、III/2、III/3条规定的证书,即DPO培训受训人应持有STCW规定的海船船舶驾驶员、船长、轮机员或轮机长证书。
文献[27][28]对DPO受训人资质进行了修改,主要包括两方面。其一,除了文献[24][25]规定的STCW证书持有人外,持有STCW公约马尼拉修正案第III/6条所规定证书的ETO也可申请参加DPO培训并获得DPO证书。其二,海上职业资格证(Marine Vocational Qualification, MVQ)的持有者可申请参加DPO培训。NI所说的MVQ,是指STCW白名单(white list)[29]所列国家颁发的沿海、内河船员证书,即这些国家沿海、内河船舶的高级船员、船长、轮机员、轮机长、ETO也可以参加DPO培训。目前白名单包含中国等127个国家和地区。
需要注意的是,DPO证书应与STCW证书或MVQ证书配合使用,DPO所工作的DP船的吨位、主推进装置功率、航行区域要符合DPO所持有STCW或MVQ证书的相关规定。
2. DPO证书分类的改变
文献[24][26]根据DP系统等级对DPO证书进行分类,分为全任务级DPO证书(full DP certificate)、有限级DPO证书(Limited Certificate)。全任务级DPO证书颁发给在2级或3级DP船上工作的DPO,有限级DPO证书颁发给在1级DP船上工作的DPO。DP系统的分级见文献[23][30]。
文献[27][28]首先根据DP船种类对DPO证书进行分类,分为海洋工程船DPO证书和穿梭油轮DPO证书,前者颁发给在海洋工程船上工作的DPO,后者颁发给在穿梭油轮上工作的DPO。这里的海洋工程船(offshore vessel)是指为离岸作业工程提供服务的一系列船舶,包括铺管船、铺缆船、挖泥船、钻井支持驳船等。根据DP系统级别的不同,海洋工程船DPO证书又可分为未分级证书(restricted to unclassified vessels)、有限级证书(limited certificate)、无限级证书(unlimited certificate),这三种证书与DP系统级别的对应关系见表1。穿梭油轮DPO证书未根据DP系统级别进行进一步细分。

表1 海洋工程船DPO证书分类
3. DPO培训体系的改变
DPO的培训体系主要包括两大类培训:岸上培训、海上培训。岸上培训包括理论知识培训和模拟器培训。海上培训以实际操作为主,如果船上安装有DP模拟器,也可以在船上开展模拟器培训。[2][24][26-28]
文献[24][26]中,虽然DPO受训人最终获得的证书有差别,但其在岸上培训的内容相同。证书的差别主要受到海上培训的影响。海上培训至少为180天,如果此期间受训人一直在1级DP船上接受培训,且得到船长签署的适任声明,则NI授予其限制级DPO证书;如果此期间受训人至少有60天在2级或3级DP船上接受培训,且得到船长签署的适任性声明,则NI授予其全任务级DPO证书。
文献[27][28]对DPO培训体系进行了较大的调整。海洋工程船DPO需要参加海洋工程船培训(offshore training),穿梭油轮DPO需要参加穿梭油轮培训(shuttle tanker training)。海洋工程船培训和穿梭油轮培训在培训内容、培训流程上均有较明显的差异,相关内容在下文中予以介绍。
四、海洋工程船DPO的培训和发证
海洋工程船DPO需要参加海洋工程船培训,海洋工程船DPO证书分为未分级证书、有限级证书、无限级证书。未分级证书的培训和发证流程见图2,该证书的海上培训在0级或未分级的DP船上进行。有限级证书、无限级证书的培训流程与未分级证书相似,但NI对海上培训的DP船等级和时间均有要求,相关内容将在后文介绍。
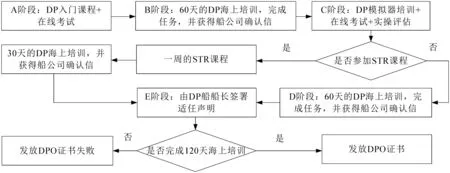
图2 未分级证书培训和发证流程
1. A阶段:DP入门课程+在线考试
A阶段培训为DP入门课程(DP induction course),培训完成后受训人会参加在线考试。DP入门课程是DPO培训的基础。该课程在NI授权的培训中心进行,最短的培训时间为28小时。NI建议80%的课时用于教授DP理论,20%的课时用于DP模拟器实际操作。通常DP入门课程用时4~5天;也可以用最多6周完成,每周上课1天。一名教师负责8名受训人,使用4台船桥操纵台。DP入门课程的主要内容如表2[27][28]。
参加完DP入门课程后,受训人需要参加在线考试,考试为选择题,考试时间为75分钟。通过考试后,NI会颁发DP航海日志(DP logbook)给受训人。航海日志上有受训人的姓名、受训人持有的STCW证书或MVQ证书的编号、培训中心以及海上培训需完成的任务等内容。
2. B、D阶段:海上培训
B、D阶段的培训在海上进行。如果一天累计培训时间不低于2小时,则计做一个DP海上时间日(DP sea time day)。海上培训分为Active培训和Passive培训。
Active培训指的是在DP船有推力时候进行的培训和评估,培训需要在持证DPO监督下进行。Active培训的主要内容包括:DP航海日志列出的需要完成的任务、FMEA、DP试验、应急演习等,DP航海日志上规定的任务见表3[31]。这里所说的DP试验包括DP年度试验、分级试验、承租人试验、靠泊实验等。DPO受训人在船上的操作必须由持证DPO进行监督。Passive培训指的是在DP船无推力时候进行的培训,这种培训包括受训人操作安装在DP船上的模拟器进行的培训。船上空间有限,所安装的模拟器可能为功能较单一的模拟器,而非功能全面、占用空间较大的全任务模拟器。每天培训结束后,DP船船长要在DP航海日志上签字,未经签字的培训不得计入海上培训时间。海上培训结束后,需要DP船船长签署适任声明,船公司要提供确认信,DPO受训人在申请证书时需将适任声明和确认信交给NI。
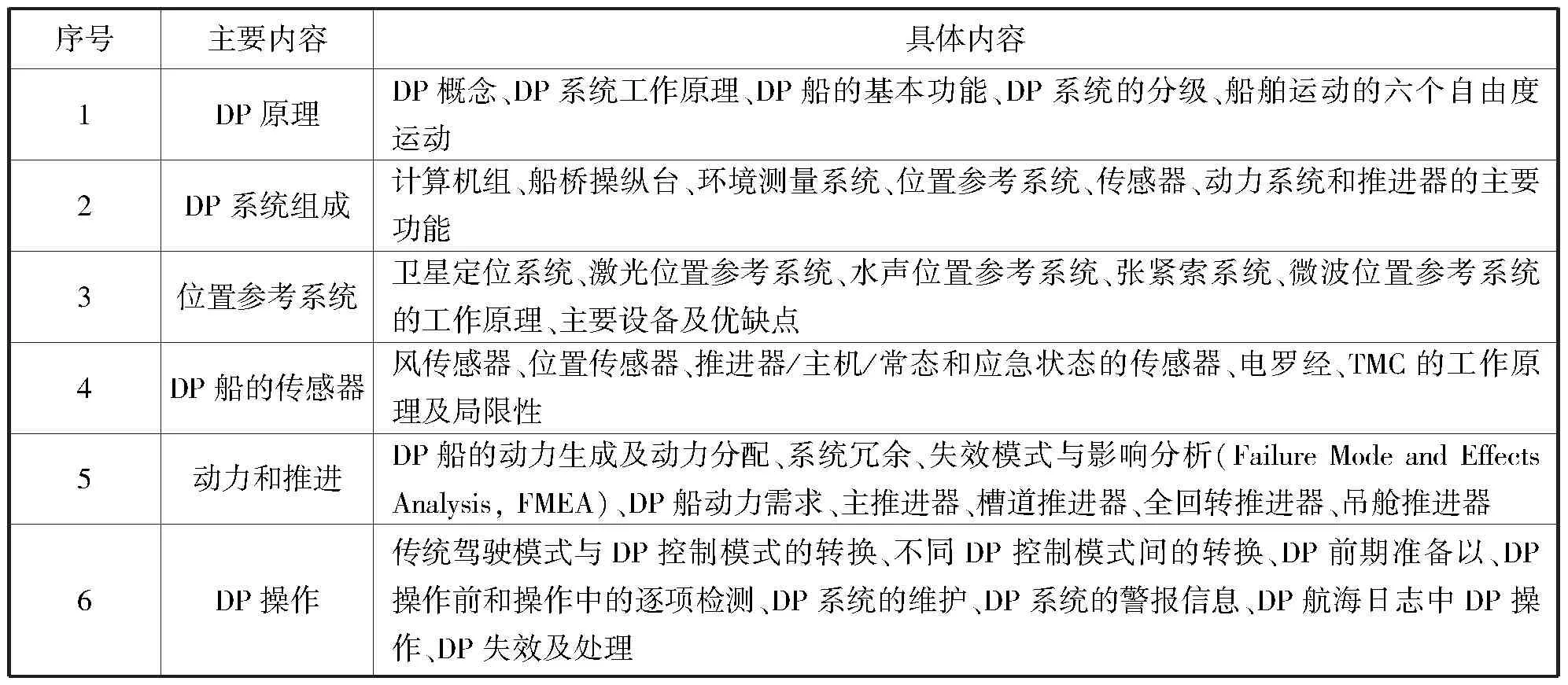
表2 DP入门课程主要内容
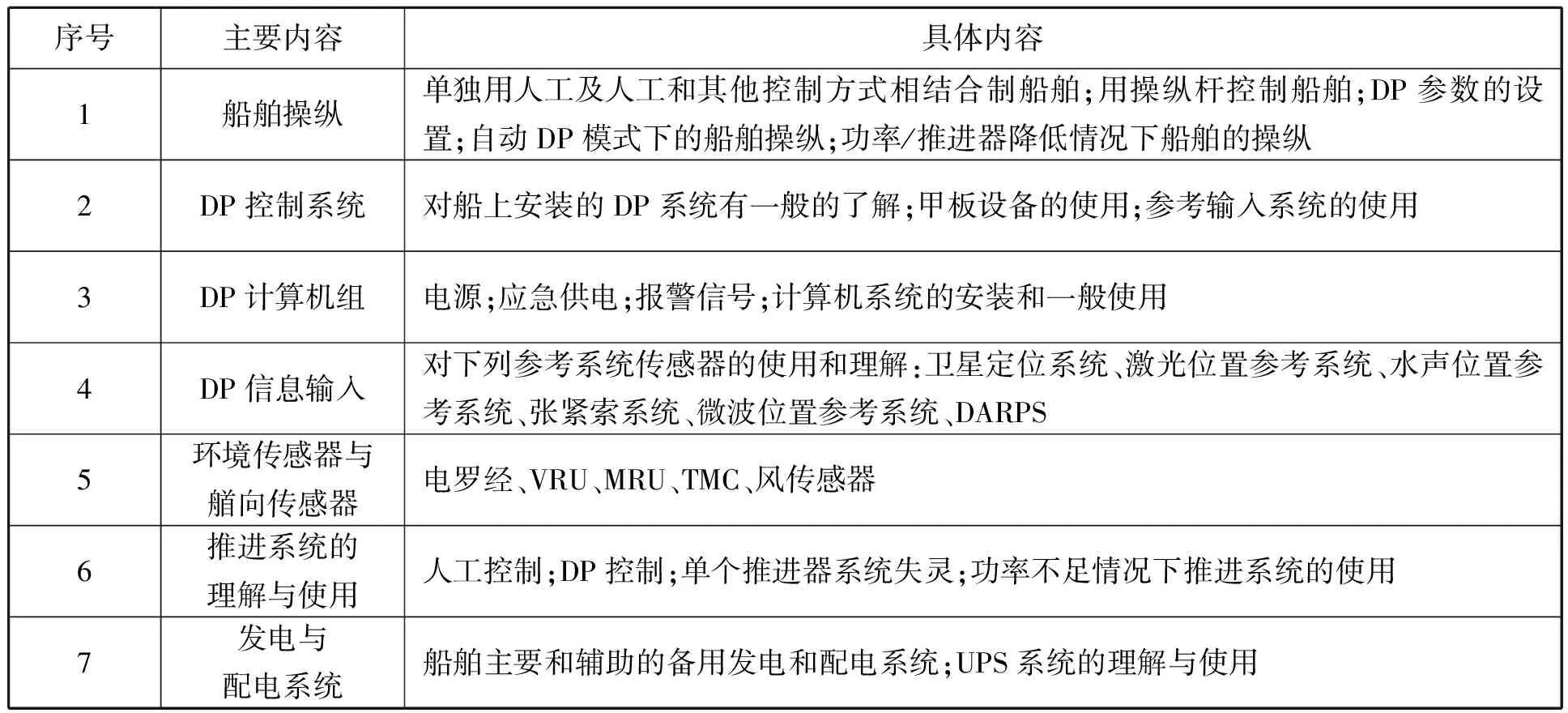
表3 DP航海日志的任务
需要注意的是,NI要求海上培训应以Active培训为主、Passive培训为辅,Active培训的总时间不得低于全部DP海上时间的75%。
3. C阶段:DP模拟器培训+在线考试+实操评估
参加DP模拟器培训的受训人,需要完成A阶段和B阶段的培训和评估,具备相应的理论基础、操作技能和海上经验。DP模拟器培训的授课时间最少为28小时。NI建议C阶段培训中,理论讲授、案例学习部分最多占总课时的20%,实际操作时间最少占总课时的80%。为了确保受训人可以获得足够多的动手机会,每名教师最多负责4名受训人,操作一台符合NI DP模拟器分级的A级或B级DP模拟器。NI对DP模拟器分级在文献[28]的附录E中。
DP模拟器培训授课方式包括理论讲授、案例学习、模拟器实际操作。其中,模拟器实际操作的主要内容包括:传统驾驶模式与DP控制模式的转换、不同DP控制模式的操作、不同DP控制模式间的转换、位置参考系统和传感器、海图、作业图纸和能力曲线等文件资料、危险的评估和识别、应急计划和逃生路线、故障和应急程序。培训完毕后受训人要参加在线考试,在线考试题型为选择题。此外,教师根据受训人在模拟器实际操作课程表现,对其操作能力进行评估。
4.海上时间缩短(Sea Time Reduction, STR)课程
DPO受训人在完成C阶段培训后,可以选择是否参加STR课程以缩短海上培训的时间。STR课程在一周内完成,总课时不得少于37.5小时。为了确保每个受训人获得足够实践经验、保证教学质量,要求每名教师指导的受训人不得超过3人,配置一台A级DP模拟器。授课方式以实际操作为主。课程开始由教师进行讲解、布置任务,然后由受训人操作模拟器完成任务,并在实际操作中进行案例学习。实际操作结束后要进行总结、讨论,要求受训人要有反馈。STR课程不适用于穿梭油轮培训。
5.有限级、无限级证书对海上培训的要求
有限级、无限级证书的培训流程与未分级证书相同,也要求进行至少120天的海上培训,培训必须在1级、2级或3级DP船上进行。如果受训人在2级或者3级DP船上培训的时间少于60天,则可获得有限级证书。如果受训人在2级或者3级DP船上培训的时间超过60天,但最后30天的海上培训未在2级或者3级DP船上进行,则也获得有限级证书;如果最后30天的海上培训在2级或者3级DP船上进行,则获得无限级证书。已经获得有限级证书的DPO,如果在2级或者3级DP船上继续进行至少60天的海上培训,其DPO证书可升级为无限级证书。
五、穿梭油轮DPO的培训和发证
穿梭油轮DPO需要参加穿梭油轮培训,穿梭油轮DPO培训和发证流程如图3所示,穿梭油轮培训共分为11个阶段。其中,第1阶段与海洋工程船培训的A阶段相同,第3阶段与海洋工程船培训C阶段相同,不再赘述。
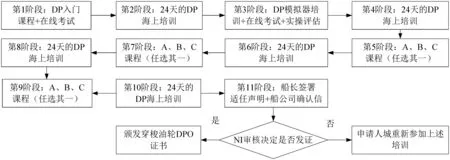
图3 穿梭油轮DPO培训和发证流程
1.第2、4、6、8、10阶段:DP海上培训
穿梭油轮DPO受训人在第2、4、6、8、10阶段均需完成为期24天的DP海上培训,每阶段受训人需要完成至少2次完整的海上装载作业。一次完整的装载作业包括:海上油田靠泊、穿梭油轮DP系统的设定、软管连接、装货、断开软管连接、离泊。如果受训人在此期间内完成完整的海上装载作业少于2次,则需继续在穿梭油轮上进行海上培训,并完成规定次数的海上装载作业。
在第2阶段,受训人要按照DP航海日志任务部分规定的项目进行操作,以确保扎实地掌握穿梭油轮DP操作的相关知识和技能,为后续的培训奠定良好的基础。建议受训人专注于其需要完成的任务,负责指导的DPO不要为受训人安排其他的任务,以确保受训人顺利完成该任务。
2.第5、7、9阶段:A、B、C课程(任选其一)
受训人在第5、7、9阶段,需要进行A、B、C课程的培训,A、B、C课程可以以任意顺序进行,但必须在第5、7、9阶段完成。A、B、C课程均以DP模拟器操作为主。
A课程培训时间为1~2天,每天课时不得少于6小时,每个班最多10名受训人,培训的主要内容为微波位置参考系统、卫星定位系统、水声位置参考系统、Parker PMS系统的操作。其中,Parker PMS系统为穿梭油轮专用系统,在海洋工程船培训中不包含该系统的相关内容。培训中所用的设备由经认可的设备生产商或其代理商提供。
B课程每个班级最多3名受训人,培训时间为5天,每天课时不得少于6小时。授课时需要采用DP模拟器,模拟器必须为A级。B课程的重点应放在海上装置附近的实际操作,包括:海上油田的靠泊、穿梭油轮与海洋工程终端设备间的安全相互作用。这里的安全相互作用包括锚泊系统的影响、软管连接、紧急关闭、与油轮支援船的交互以及现场通信等。所有的推进功能、动力供应、位置参考系统以及装备和系统错误和失败的案例和后果均应当纳入讨论和练习中。参加B课程后,受训人可以正确操作穿梭油轮的位置参考系统,并进行演示和说明,能够理解位置参考系统出现的问题和故障的产生原因及解决方法。课程结束后需要进行评估,评估包括理论知识考试和实际操作评估。
C课程每个班最多3名受训人,总课时为37.5小时,主要内容为非穿梭油轮作业的DP操作。操作内容可参照海洋工程船培训C阶段。
六、我国DPO培训现状及存在的问题
我国DPO培训处于起步阶段。上海海事大学已经建成DP中心并得到NI授权,已开始DPO培训。大连海事大学航海学院、广州航海学院培训中心虽购入DP模拟器,但并未开展DPO培训。目前我国DPO培训存在以下几个问题:
(1)相关法规的缺失。目前我国尚未制定DPO培训和发证相关的法规。
(2)DPO培训机构的资质受制于NI。目前国内仅有上海海事大学DP中心得到NI认证,可以进行DPO培训。大连海事大学航海学院、广州航海学院培训中心虽已购入了DP模拟器,在硬件上满足了NI DPO培训的要求,但由于尚未获得NI授权,而我国也没有相关的法规,因此无法开展DPO培训,导致场地、设备也处于闲置状态,造成了资源的浪费。
(3)DPO师资力量不足。目前国内持证的DPO较少,经验丰富的持证DPO则更少,DPO培训师资不足。
(4)DP模拟器为国外厂商垄断。目前DP模拟器由Kongsburg、Transas等厂商提供,售价高昂,维修、升级不便。国内科研机构、高校虽进行了相关研究,但尚未有产品推出。
七、结语
DPO是DP海上作业的核心操作人员。目前DPO的适任培训规则由NI制定,DPO证书的发放与管理也由NI负责。我国在DPO培训、发证方面尚无相应的法规,DPO适任研究仍处于起步阶段。本文对DPO的适任研究进行了综述。为了有效解决目前我国DPO培训存在的问题,建议可采取以下措施:
(1)国内高校、培训机构与NI合作办学积累办学经验。NI具有丰富的DPO培训、管理经验,国内高校、培训机构应与NI密切合作,积累DPO培训、管理经验,这方面上海海事大学已经迈出了重要一步,值得国内同行借鉴、学习。
(2)加大DPO队伍的建设。虽然我国尚未有DPO培训、发证的相关法规,但现阶段船公司、海事高校及科研机构的人员可以参加NI的DPO培训,这样既扩大了我国的DPO队伍,也为DPO师资队伍的建设打下基础。建议船公司、海事高校及科研机构给予参加DPO培训的人员优惠政策,使其能安心学习。
(3)政府主管部门应出台适合我国国情的DPO适任的法规。通过与NI合作办学以及DPO师资队伍的建设,为我国政府主管部门出台DPO适任法规奠定基础。制定适合我国国情的DPO适任法规,使得我国可打破NI对于DPO培训、发证的垄断,充分利用国内资源,发挥主观能动性,由“受制于人”变为“自力更生”。在制定法规时,需要进行充分的调研,法规需要与国际接轨,可以参考NI、IMCA的相关文件、规定。
(4)国内科研机构、高校、厂商应加大DP模拟器研发力度,推出具有独立知识产权的高品质DP模拟器,摆脱国外厂商的垄断,为我国DPO培训事业贡献出力量。
[1] 郑荣才, 宋健力, 黎琼,等. 船舶动力定位系统[J].中国惯性技术学报, 2013, 21(4): 495-499.
[2] IMCA. Guidelines of the design and operation of dynamically positioned vessels [S]. London: IMCA, 2007.
[3] IMCA. Annual seminar 2014 [EB/OL]. [2016-06-30]http://www.imca-int.com/media/161633/d1_w1e_ian_smith_dilution_of_skills.pdf.
[4] 赵大威, 边信黔, 丁福光.非线性船舶动力定位控制器设计[J].哈尔滨工程大学学报, 2011, 32(1): 57-61.
[5] 王芳, 万磊, 姜大鹏,等. DP-3级动力定位控制系统的体系结构[J].应用基础与工程科学,2012,20(1): 130-138.
[6] Lei Z, Guo C, Fan Y. Dynamic positioning system based on active disturbance rejection technology [J]. Journal of Ocean University of China, 2015, 14(4): 636-644.
[7] 蔡连博, 许文兵, 曲俊生,等.深水铺管起重船多传感器数据融合技术研究[J].中国造船, 2014, 55(3): 202-209.
[8] 徐树生.船舶动力定位系统多传感器信息融合方法研究[D].哈尔滨: 哈尔滨工程大学, 2013.
[9] 何宁辉. 船舶动力定位系统中无线传感器网络数据融合技术研究[D]. 武汉: 武汉理工大学, 2013.
[10] XU S, WANG L, WANG X, et al. Experimental evaluation on a newly developed dynamic positioning time domain simulation program [J]. Journal of Ship Mechanics, 2016, 20(6): 686-698.
[11] 褚德英, 秦一飞, 张葆华.动力定位控制系统HIL仿真试验平台设计与实现[J]. 船舶工程, 2016, 38(S1): 77-80.
[12] 李踊跃, 王磊, 孙攀.深水半潜式钻井平台动力定位最优作业方向研究[J]. 海洋工程, 2011, 29(1): 26-31.
[13] 余建星, 林秋雅,林晓龙,等. FDPSO外输作业中碰撞风险的定量计算[J].海洋技术学报, 2014, 33(2): 65-70.
[14] WU C, SUN L, AI S, et al. Coupling motion analysis on a dynamic-positioning S-laying[J].Journal of Ship Mechanics, 2015, 19(3): 249-263.
[15] 王洪超, 王磊, 张峰. 锚泊辅助动力定位系统推力器故障模式影响分析[J]. 海洋工程, 2013, 31(1): 26-31.
[16] 刘杨. 动力定位系统故障模式与影响分析[M]. 哈尔滨: 哈尔滨工程大学, 2011.
[17] 蔡长松, 严国华, 张印桐.饱和潜水系统在作业穿甲板布置[J].中国造船, 2010, 51(S1): 95-101.
[18] XU S, WANG X, WANG L, et al. A comparision of positioning capabilities between vessels with different thruster configurations [J]. Journal of Ship Mechanics, 2016, 20(3): .265-276.
[19] 孙行衍,付明玉,施小成,等.基于 UKF 联邦滤波的动力定位船舶运动状态估计[J].中国造船, 2013, 54(1): 114-127.
[20] 王川, 李辉, 任慧龙,等.深水铺管船的动力定位能力评估系统[J].华中科技大学学报(自然科学版), 43(2): 61-65.
[21] ZHU Z, YIN Y. Modeling and visualizing of the mooring system of anchor handling simulator[C]. Communications in Computer and Information Science, Vol. 325, Part 3. Berlin: Springer-Verlag, 2012: 132-140.
[22] 钱小斌, 尹勇, 张秀凤,等. 海上不规则波浪扰动对船舶运动的影响[J].交通运输工程学报, 2016, 16(3): 116-124.
[23] 边信黔, 付明玉, 王元慧.船舶动力定位[M]. 北京: 科学出版社, 2011.
[24] NI. Dynamic positioning operator’s certificate[S]. London: NI, Aug, 2007.
[25] IMO. 1978年海员培训、发证和值班标准国际公约马尼拉修正案[M]. 大连: 大连海事大学出版社, 2010.
[26] NI. Dynamic positioning operator’s certificate[S]. London: NI, Jul,2012.
[27] NI. Dynamic positioning operator’s training and certification scheme [S]. London: NI, Dec, 2014.
[28] NI. Dynamic positioning operator’s training scheme accreditation standard [S]. London: NI, Oct, 2015.
[29] IMO. STCW white list expended [EB/OL]. [2016-09-06]http://www.imo.org/blast/contents.asp?topic_id=67&doc_id=1026.
[30] Bray D. DP operator’s handbook [M]. London: NI, 2008.
[31] NI. Logbook guidance [EB/OL]. [2016-09-16]http://www.nialexisplatform.org/dp-help-page/offshore/guidance-application.
2016-10-08
广东省普通高校特色创新项目(A510602);广州航海学院创新强校工程建设项目(B510620)
陈丽宁(1981-),男,讲师,博士,主要从事虚拟现实、计算机图形学等研究。
U676.2
A
1006-8724(2016)04-0065-07
猜你喜欢
水上消防(2021年5期)2022-01-18
小哥白尼(趣味科学)(2021年6期)2021-11-02
故事作文·高年级(2021年4期)2021-05-06
小哥白尼(神奇星球)(2021年11期)2021-03-08
宁波大学学报(理工版)(2020年1期)2020-01-09
风流一代·经典文摘(2017年8期)2018-01-15
兰台世界(2017年13期)2017-08-08
中国海上油气(2016年5期)2016-06-23
装备环境工程(2015年5期)2015-02-28
装备环境工程(2015年4期)2015-02-28