
基于改进定子磁链观测器的MRAS转速估算方法
2016-12-20 07:03蔡文皓单成龙范中洋
微特电机 2016年7期
蔡文皓,单成龙,范中洋
(西安科技大学,西安 710054)
基于改进定子磁链观测器的MRAS转速估算方法
蔡文皓,单成龙,范中洋
(西安科技大学,西安 710054)
提出一种在定子坐标系下以定子侧变量为状态变量的转速估算方法,减少系统的复杂性,完全不受转子侧参数影响。在此基础上将改进低通滤波器作为定子磁链观测器,大大减小系统的直流偏置误差和初始值误差。通过仿真验证了该方法具有较强的鲁棒性并能很好地估算转速,提高磁链观测精度。
异步电机;无速度传感器;直接转矩控制;低通滤波器;模型参考自适应系统
0 引 言
在传统直接转矩控制系统中,定子磁链的观测方法通常采用纯积分器即基于u-i模型的观测方法,当电机运行于低速域时模型中的纯积分环节本身所固有的直流偏置误差和初始值误差将严重影响定子磁链的观测精度,导致转矩脉动增大进而影响电机的稳定运行。针对上述问题,文献[1]中以一阶低通滤波器来代替纯积分器,通过选择合适的截止频率来抑制积分环节所产生的直流偏置误差,然而采用低通滤波器又将会产生新的定子磁链幅值和相位误差。在此基础上引入闭环幅值补偿环节来消除直流偏置误差,提高定子磁链的观测精度。
在高性能异步电机变频调速系统中,速度反馈环节往往是必不可少的,但高精度、高分辨率的编码器不仅价格昂贵,而且还受环境、温度等因素的影响,故越来越多的学者投入到无速度传感器直接转矩控制系统的研究中。国内外学者提出了许多转速估算方法,其中应用最为广泛的应属模型参考自适应法,该方法具有模型简单,易于实现,鲁棒性强等特点,现已广泛应用于变频调速系统中。在传统模型参考自适应方法利用转子侧变量估算转速的基础上,提出一种完全基于定子侧变量的MRAS转速估算方法,直接在定子坐标系下分析和计算异步电机的数学模型,控制电机的磁链和转矩,完全不需要计算转子磁链,即可估算转速,并且在低速下也具有良好的性能。
1 改进低通滤波器的定子磁链观测器
两相静止坐标系下,由异步电机的基本方程可得定子反电动势方程[2]:
(1)
由式(1)可得定子磁链在αβ坐标系下的分量:
(2)
为了解决纯积分器带来的直流偏置和初始值问题采用一阶低通滤波器带替纯积分器[3]。
(3)
式(3)在一定程度上减少了由纯积分器带来的直流偏置误差。然而,当低通滤波器的截止频率ωc小于或接近于定子频率时,将造成新的幅值和相位误差。因此在低通滤波器的基础上加入闭环幅值补偿环节,可以很好地补偿低通滤波器产生的幅值和相位误差。改进定子磁链观测器结构如图1所示。

图1 改进定子磁链观测器结构图
图1中,定子磁链ψsα,ψsβ经低通滤波器输出后,再利用极坐标变换将幅值和相位进行分离,幅值经过限幅器L,再进入极坐标反变换构成闭环幅值反馈,这样就形成了一种带幅值补偿的定子磁链观测器。在直接转矩控制系统中,保持定子磁链幅值恒定可使电机稳定运行,因此限幅器的阈值L为给定磁链值。若限幅器输入磁链幅值未超过限幅器阈值,则限幅器输出磁链为期望的纯积分效果,若输入磁链幅值超过限幅器阈值,则输出磁链为限幅器阈值。定子磁链相位经过两次坐标变换未发生任何变化,避免了因积分饱和而导致正弦磁链信号发生畸变。
2 基于定子侧的MRAS转速估算方法
模型参考自适应理论广泛应用于电机控制领域,是目前比较成熟的理论。模型参考自适应系统有三种参数辨识结构模型:串联模型、并联模型和串并联模型,输出并联型的模型参考自适应方法在电机参数辨识方面应用最为广泛[4]。传统MRAS转速估算方法中,参考模型为不含转速的转子磁链电压方程,可调模型为含有待辨识转速的转子磁链电流方程,且两模型须具有相同物理意义的输入量,以转子磁链作为比较输出量构成广义误差,采用合适的自适应率来估算转速[5]。传统MRAS系统结构图如图2所示。
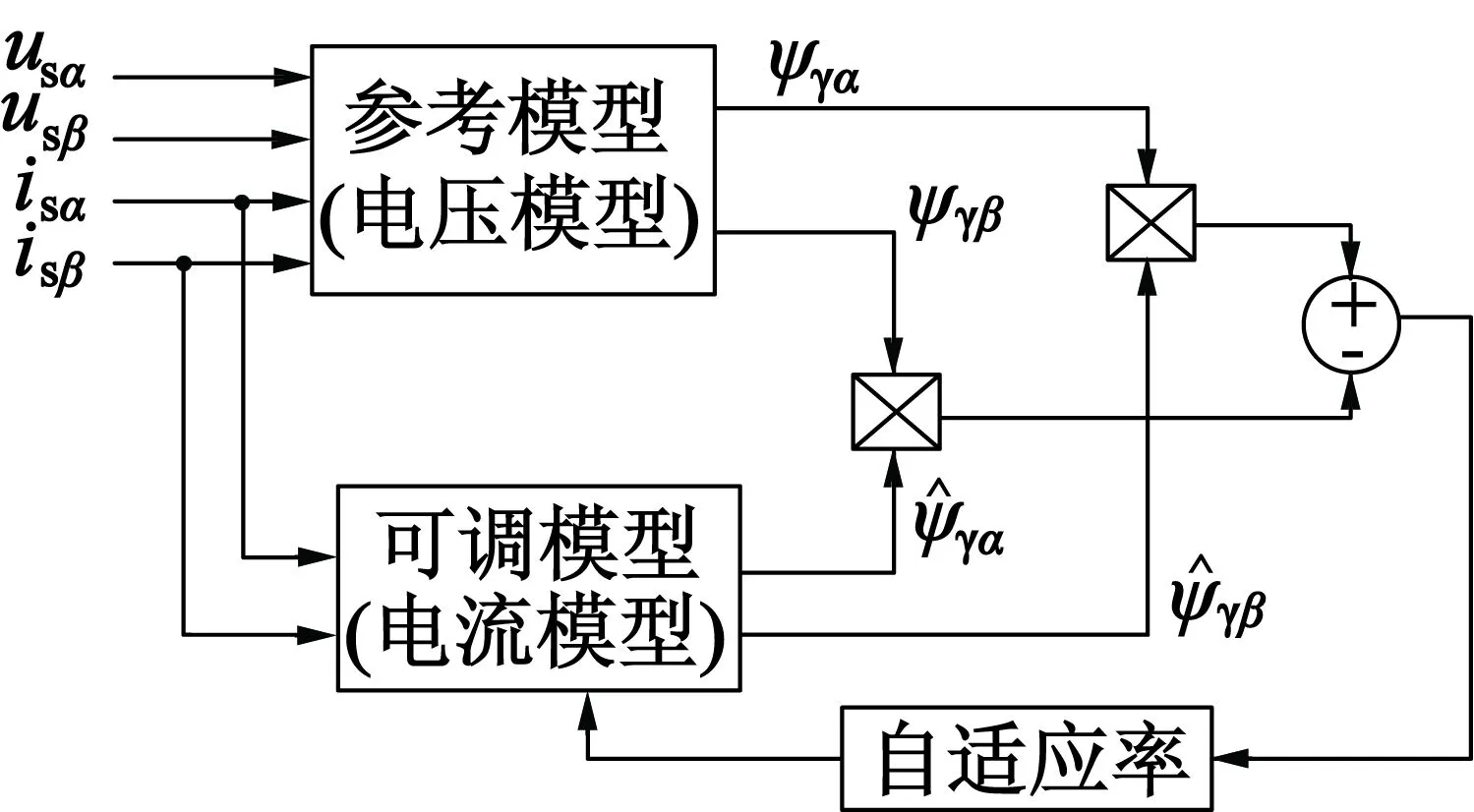
图2 传统MRAS系统结构图
由于传统MRAS转速估算方法是在转子侧估算转速,完全摒弃了直接转矩控制的优点,增加系统的复杂性,本文提出完全利用定子侧的变量来估算转速,使用改进定子磁链观测器构成无速度传感器直接转矩控制系统。在两相静止坐标系下,异步电机定、转子磁链和电压矢量方程为[6]:
(4)
由式(4)可得:
(5)
(6)
由式(4)与式(6)可得:
(7)

将定子磁链电压表达式:
(8)
带入式(7)得:
(9)
式(8)和式(9)构成了基于定子侧的MRAS转速估算方法的电机状态方程,根据Popov超稳定性理论可推算出基于定子侧的MRAS转速估算公式:
(10)

3 仿真验证
为了验证上述方案的可行性,在MATLAB/Simulink中构建基于定子侧的MRAS转速估算方法模型,并进行仿真[5]。选用异步电机额定参数为:PN=15kW,UN=400V,fN=50Hz,Rs=0.2147Ω,Rr=0.220 5 Ω,Ls=Lr=0.065 2 H,Lm=0.064 2 H,p=2。


图3 异步电机无速度传感器直接转矩控制结构图
系统运行时,电机给定磁链1Wb,空载启动,1.8 s时转速由750 r/min突变为30 r/min,2.8 s时突加10 N·m负载,仿真波形如图4所示。

(a)电机实际转速(b)定子电流

(c)电磁转矩(d)定子磁链幅值
图4 电机变负载、变转速工况
由图4可以看出,电机运行在高速和低速时,电机均能快速达到给定转速,且估算转速与实际转速之间误差较小,系统突加负载时仍能克服扰动,快速达到稳定状态,从而验证了上述方案的可行性。
4 实验分析
为进一步验证该转速估算方法的可行性,选取型号为TMS320F28335的DSP作为整个电机调速系统的控制器,针对上述控制方案搭建实验平台并进行验证实验,来验证该控制系统是否能确保电机按预期给定转速可靠运行。实验波形的测量使用示波器结合上位机观测的方法,负载使用了一台和异步电机同轴连接的直流电机和一台电子负载。
图5为电机实际转速与反馈转速的波形,是通过上位机所截得的局部波形图,图6为转速为750 r/min时定子电流波形。由图5电机实验波形与图4(a)仿真波形比较可以看出,电机实际运行情况与仿真情况基本相同。由于仿真是在理想情况下进行的,没有考虑硬件电路本身所固有的误差,进而可知电机实际运行的波形比仿真波形的脉动稍微大一些,而且转速实验波形响应时间相比仿真波形的响应时间而言,存在一定差异。

图5 电机运行中实际转速与反馈转速

图6 转速为750 r/min时电流波形(截图)
5 结 语
通过仿真分析与实验验证,证明了基于改进定子磁链观测器的MRAS转速估算方法不仅提高了定子磁链的观测精度和转速估算精度,而且也减少了系统的复杂度和误差,证明了上述方案的可行性。
[1] 韦立祥,刘丛伟.一种消除电压型磁链观测器中直流偏置误差的新方法[J].清华大学学报,2001,41(9):51-54.
[2] 李华德.交流调速控制系统[M].1版.北京:电子工业出版社,2003.
[3] 何志明.基于新型定子磁链观测器的无传感器直接转矩控制系统研究[D].重庆:重庆大学,2009.
[4] 王夺,胡金高.基于Matlab的异步电机直接转矩控制系统的仿真研究[J].机电工程技术,2006,35(1):47-50.
[5] 洪乃刚.电力电子、电机控制系统的建模和仿真[M].1版.北京:机械工业出版社,2010.
[6] BEIG A R,NARAYANAN G,RANGANATHAN V T.Modified SVPWM algorithm for three level VSI with synchronized and symmetrical waveforms[J].IEEE Transactions on Industrial Electronics,2007,54(1):486-494.
[7]RASHAGHF.DTC-SVMbasedonPItorqueandPIfluxcontrollerstoachievehighperformanceofinductionmotor[J].ResearchJournalofAppliedSciences,EngineeringandTechnology,2014,7(4):875-891.
A MRAS Speed Estimation Method Based on the Improved Stator Flux Observer
CAIWen-hao,SHANCheng-long,FANZhong-yang
(Xi'an University of Science and Technology,Xi'an 710054,China)
A rotator speed estimation method which used the stator's variables as state variables in stator coordinates was addressed. It reduced the complexity of system design and was totally independent of the rotator parameters. The improved LPF was utilized as stator flux observer. As a result, the DC bias error and initial values' error were greatly reduced. It was verified by the simulation system that the method had strong robustness, good speed estimation and high flux observe accuracy.
asynchronous motor; speed sensorless; direct torque control; low-pass filter; model reference adaptive system (MRAS)
2016-01-29
TM343
A
1004-7018(2016)07-0063-03
蔡文皓(1957-),男,教授,研究方向为电气传动、电力变换及可再生能源发电技术等。
猜你喜欢
电机与控制应用(2022年1期)2022-09-01
电机与控制应用(2022年4期)2022-06-27
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
通信技术(2020年4期)2020-04-25
机电信息(2018年6期)2018-03-05
电测与仪表(2016年10期)2016-04-12
电测与仪表(2016年7期)2016-04-12
成都大学学报(自然科学版)(2015年3期)2015-08-01
组合机床与自动化加工技术(2014年10期)2014-03-01
