半捷联成像导引头视线转率的几何提取算法*
2016-12-20 01:33敖志伟丁海山李亦君赵桂瑾
弹箭与制导学报 2016年3期
敖志伟,丁海山,李亦君,赵桂瑾,2
(1 中国空空导弹研究院,河南洛阳 471009;2 航空制导武器航空科技重点实验室,河南洛阳 471009)
半捷联成像导引头视线转率的几何提取算法*
敖志伟1,丁海山1,李亦君1,赵桂瑾1,2
(1 中国空空导弹研究院,河南洛阳 471009;2 航空制导武器航空科技重点实验室,河南洛阳 471009)
由于滚仰式半捷联导引头的特殊性,无法直接测量得到制导系统所需的视线转率,因此文中提出一种新的视线转率的几何提取算法。通过坐标变换获取视线在惯性空间中的角位置,利用刚体定点转动理论在惯性空间中直接解算视线转率。用反正切形式跟踪微分器求取框架角速度,避免了直接微分带来的噪声放大效应,提高了视线转率的精度。数值仿真验证了文中所提算法的有效性。
视线转率;半捷联;跟踪微分器
0 引言
半捷联成像导引头技术逐渐成为导引头小型化以及降低成本的重要发展方向[1-2]。惯性视线转率是导引头最重要的输出信息,利用视线转率通过适当的导引方法可以形成导弹制导指令。由于半捷联成像导引头实质上采用的是数字稳定平台,其结构形式和工作方式与传统的陀螺稳定平台有本质区别,无法直接提取视线转率。
文中提出了一种惯性视线转率的几何提取算法。利用半捷联成像导引头提供的可测信息,通过坐标变换获得视线在惯性空间中的角位置,根据刚体定点转动理论直接在惯性空间中解算视线转率。该算法设计原理简单,易于实现,具有一定的工程参考价值。
1 算法分析
以俯仰滚转两轴半捷联成像导引头为对象进行分析。框架示意图如图1所示。框架上的角传感器可以测出框架转角,探测成像系统可以测出视线相对稳定平台的空间位置。

图1 滚仰半捷联位标器框架示意图
1.1 视线相对惯性系的空间指向
位标器可以测出视线相对稳定平台的空间位置,位标器框架角反映了稳定平台相对弹体的姿态,弹体姿态角反映了弹体相对惯性系的空间角位置。综合这些可测信息就可以确定视线相对惯性系的空间指向。

惯性系先绕Y轴转α角,然后绕Z轴转β角,最后绕X轴转τ角就和弹体系重合。
内、外框架的运动可以抽象为内环系以外环系Z轴为定轴的定轴转动和外环系以弹体系X轴为定轴的定轴转动。弹体系绕X轴转γs角就和外环系重合,外环系绕Z轴转θs角就和内环系重合。
各坐标系之间的变换关系如图2所示。

图2 各坐标系之间的变换关系

(1)
另一方面有:
(2)
上面两式联立解得:
(3)
1.2 视线相对惯性系的角运动


(4)
(5)
由式(5)就可以直接在惯性空间中解算半捷联导引头视线转率。
2 基于跟踪微分器的算法实现
当缺少角速度传感器时,应用式(5)计算需要首先求出角度的微分信号。文献[7]中提出了一种适于工程应用的跟踪微分器。该微分器采用反正切形式的加速度函数,兼顾跟踪快速性与过渡过程平稳性,并且具有很好的滤波效果,可以给出连续平滑的跟踪信号和微分信号。设输入信号为v(t),则设计如下跟踪微分器[7]:
(6)
其中:R,a1>0,a2>0,f1>0,f2>0是可调的参数。当参数选取合适时,x2(t)可以作为输入信号v(t)的近似微分。其离散形式为:
(7)
式中:δt为采样时间。k=1,2,…。
3 数值仿真
3.1 仿真模型
由于视线相对惯性系的角运动可以抽象为视线系以惯性系原点O为固定点的定点转动。因此视线系相对惯性系的位置可以由3个欧拉角确定。这里引入一组新的欧拉角{γ,φ,η},这样惯性系先绕X轴转γ角,然后绕Y轴转φ角,最后绕X轴转η角就和视线系重合。
同前面的分析,利用新引入的欧拉角,视线相对惯性系运动形成的角速度中垂直于视线的分量在惯性系中的投影为:
(8)
仿真中设定视线相对惯性系转动的运动学方程为:
(9)
式中:ω1、ω2、ω3、γ0、φ0和η0为某常值。
设定弹体相对惯性系转动的运动学方程为:
(10)
式中:ω4、ω5、ω6、α0、β0和τ0为某常值。
设定稳定平台相对弹体系转动的运动学方程为:
(11)
式中:ω7、ω8、γs0和θs0为某常值。
在目标处于导引头视场内的前提下利用式(8)和式(9)构造理论视线转率;通过式(10)、式(11)分别构造弹体运动、位标器框架运动,并由弹目空间几何关系解算出视线在内环系中的方位角和高低角;再根据式(3)解算出视线相对惯性系的角位置;最后将式(5)解算的结果和构造的理论视线转率进行比较。仿真中弹体姿态角引入幅值0.02°的高斯白噪声,位标器框架角引入幅值0.012°的高斯白噪声,视线在内环系中的方位角和高低角引入幅值1个像素的高斯白噪声。跟踪微分器的参数取为R=18,a1=5,a2=4,f1=1,f2=2。
3.2 仿真结果
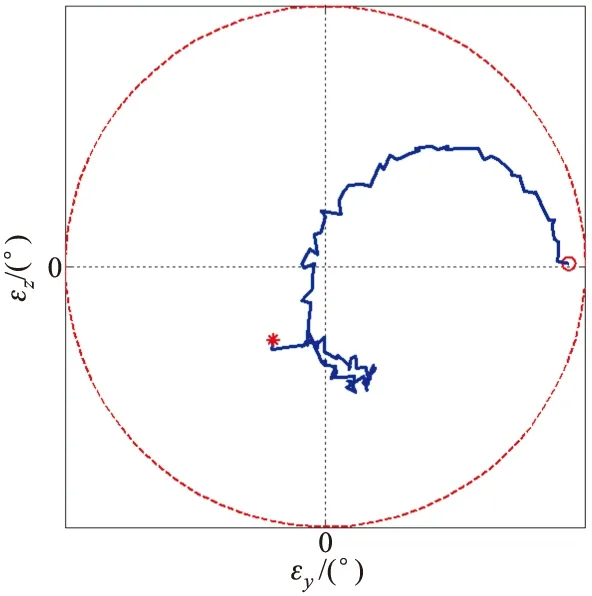
图3 目标像在视场中的运动轨迹
仿真时间设为1 s,采样时间间隔为0.01 s。取ω1=300°/s,ω2=-2°/s,ω3=-20°/s,ω4=-1°/s,ω5=-30°/s,ω6=300°/s,ω7=-302°/s,ω8=31°/s,φ0=1.4°,γ0=η0=0,α0=β0=τ0=0,γs0=θs0=0。这种情形表示视线相对于惯性系的一般运动,弹体姿态在3个方向上都有运动,位标器框架也相应运动以抵消弹体姿态运动使目标维持在视场内。图3给出了目标像在视场中的运动轨迹,图中红色圆圈表示轨迹起点,红色星号表示轨迹终点。图4给出了视线转率在惯性系中的投影,其中红色实线表示理论值,黑色虚线是采用文中算法得到的结果,蓝色点划线是直接差分得到角度微分后再用式(5)计算的结果。从仿真结果看,同样的噪声条件下,用文中提出的算法解算出的视线转率比数值微分的方法有更高的精度。
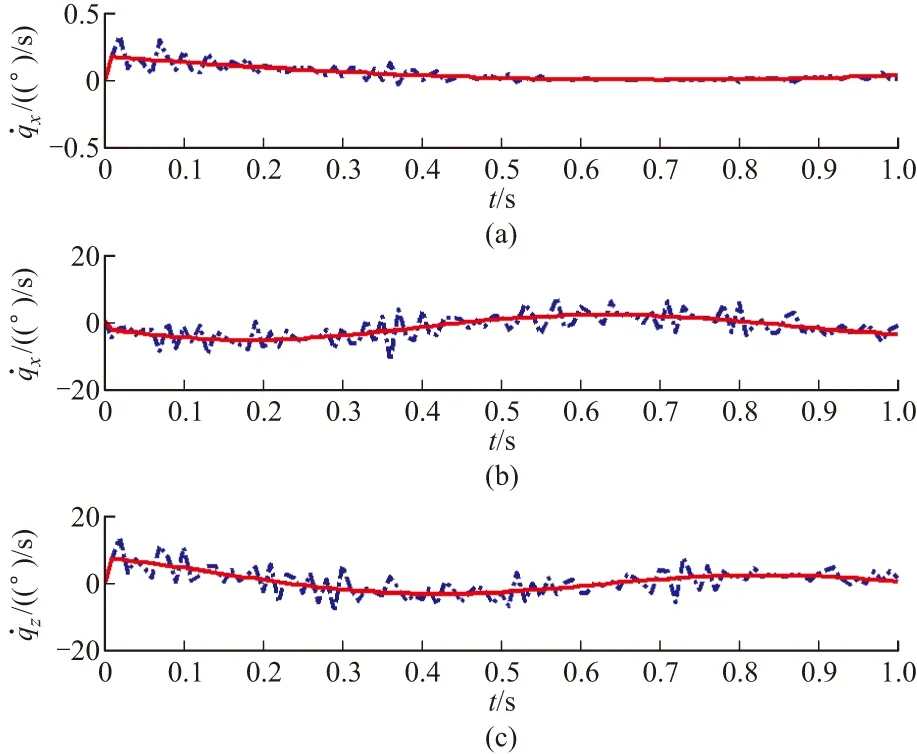
图4 视线转率在惯性系中的投影
4 结论
对于半捷联成像导引头视线转率难以提取的问题,文中提出了一种几何提取算法。根据视线的空间位置,通过坐标变换获得视线在惯性空间中的角位置,直接在惯性空间中解算视线转率。用反正切形式跟踪微分器代替直接微分求取框架角速度,提高了视线转率的重构精度。所提算法设计简单,数值仿真试验表明了所提算法的有效性,具有一定的工程应用参考价值。
[1] RUDIN R T. Strapdown stabilization for imaging seekers: AIAA, A93-42219 [R]. 1993
[2] 訚胜利, 贾宏光, 张跃, 等. 光学成像导引头半捷联稳定 [J]. 红外与激光工程, 2011, 40(1): 129-132.
[3] 贾筱媛, 赵超. 半捷联稳定控制方案与制导信息提取方法 [J]. 红外与激光工程, 2011, 40(12): 2474-2479.
[4] 杨雅君, 徐胜利, 李晓东, 等. 弹载相控阵雷达视线重构研究 [J]. 弹箭与制导学报, 2012, 32(5): 39-44.
[5] 王男, 张奕群. 提高视线转率精度的一种改进方法 [J]. 现代防御技术, 2007, 35(4): 64-68.
[6] OCHI Y, ITOH K, KANAI K. Application of H-infinity control to missile guidance and control: AIAA 2000-4069 [R]. 2000.
[7] 董小萌, 张平. 反正切形式跟踪微分器设计及相平面分析 [J]. 控制理论与应用, 2010, 27(4): 533-537.
A Geometric Algorithm of Line-of-sight Rate Reconstruction for Semi-strapdown Imaging Seeker
AO Zhiwei1,DING Haishan1,LI Yijun1,ZHAO Guijin1,2
(1 China Airborne Missile Academy, Henan Luoyang 471009, China;2 Aviation Key Laboratory of Science and Technology on Airborne Guided Weapons, Henan Luoyang 471009, China)
In view of particularity of semi-strapdown imaging seeker, line-of-sight rate couldn’t be measured directly, so a new algorithm for the line-of-sight rate was provided in this paper. Angular positions of line-of-sight in inertial space were obtained by coordinate transformation. Then the line-of-sight rate was solved directly in the inertial space based on the theory of rigid body turning around a fixed point. Angular rates were obtained by an arctangent-based tracking differentiator, which could avoid noise amplification effect caused by numerical differentiation and improve accuracy of the line-of-sight rate. Numerical simulations show efficiency of the proposed algorithm in this paper.
line-of-sight rate; semi-strapdown; tracking differentiator
2015-06-28
航空科学基金(20120112006)资助
敖志伟(1980-),男,河南洛阳人,工程师,硕士,研究方向:导引头稳定平台控制技术。
TJ765.3
A
猜你喜欢
数学物理学报(2022年5期)2022-10-09
黑龙江大学自然科学学报(2022年1期)2022-03-29
北京航空航天大学学报(2017年5期)2017-11-23
北京航空航天大学学报(2017年12期)2017-04-23
北京航空航天大学学报(2017年10期)2017-04-20
制导与引信(2016年3期)2016-03-20
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
火控雷达技术(2016年3期)2016-02-06
火控雷达技术(2016年1期)2016-02-06
火控雷达技术(2016年1期)2016-02-06