星敏感器抗杂光背景滤波图像处理方法研究
2016-12-20 05:36余路伟毛晓楠胡雄超吴永康
上海航天 2016年4期
余路伟,毛晓楠,金 荷,胡雄超,吴永康
(1. 中国航天科技集团公司 红外探测技术研发中心,上海 201109; 2.上海航天控制技术研究所,上海 201109)
星敏感器抗杂光背景滤波图像处理方法研究
余路伟1、2,毛晓楠1、2,金 荷1、2,胡雄超1、2,吴永康1、2
(1. 中国航天科技集团公司 红外探测技术研发中心,上海 201109; 2.上海航天控制技术研究所,上海 201109)
为提高星敏感器抗杂光干扰性能,提出了一种称为背景滤波的全帧型星图处理算法。根据星点和背景不同特征,对背景估计法进行了改进:设定模板尺寸为77像素,用模板边缘像素的均值作为中心点的背景估值;将目标点本身引入背景估计,增加目标点权重以抑制背景的残留;设定一较小的固定阈值以分割星点与虚警点,并采用单双点去噪。给出了适宜FPGA并行处理的算法流程。对不同噪声水平下受杂光干扰的星图的处理结果表明:与分块阈值法和高通滤波法相比,背景滤波算法的抗杂光能力更强,虚警率低,星点提取率高,运算简单,便于FPGA实现,有无杂光干扰时的适应性好。
星敏感器; 星点提取; 抗杂光; 图像处理; 背景滤波; 背景估计; 掩模; 虚警率
0 引言
星敏感器(简称星敏)具高精度、高可靠和长寿命特点,已成为卫星平台姿轨控系统的核心测量部件,在空间飞行任务中具有十分重要的作用[1]。作为光学敏感器,抗杂光干扰成为影响星敏性能的一个重要因素[2]。在轨时,星敏受月光、地气光、太阳光和星体反射光四种杂光干扰。杂光干扰下,星敏成像将受到污染,原起伏均匀的背景将会呈现大幅度变化,灰度值也将整体抬高。这种不均衡的背景会严重影响分割阈值选取,造成虚警率急剧上升,星点提取率迅速下降,最终或导致星跟踪丢失,星敏姿态数据无效。抗杂光时,除从遮光罩、探测电路抗光晕等硬件入手外,软件图像处理有多帧跟踪检测的局部方法和单帧星图的整幅处理方法两种[3-7]。多帧跟踪检测的局部方法可巧妙地规避杂光干扰,只关注波门内星点与背景的分割,但此类方法较复杂,需要多帧间星点目标的严格配准,以及较多缓存,而且一旦跟踪丢失,星敏只能进入全天捕获状态,此时只能采用单帧图像整幅处理的方法。基于单帧处理的传统阈值分割法存在局部适应性差、弱星提取能力不足等问题,导致其无法在杂光干扰下使用[1]。
为应对单帧图像的杂光干扰,背景估计是一种常见的全局处理途径。背景估计的要点是:图像上任一像素的背景值均可由其周围像素值线性或非线性表示,将每个像素点的灰度值与相应背景估值作差得到残差图像,残差图像能表征原始图像的对比度,在此基础上再进行图像分割则易求得最优阈值。背景估计的关键是背景估计掩模(又称图像卷积核)的设计,不同的掩模对应不同的背景估计方法。文献[7]在改进最大值背景预测的基础上,增加多级梯度检测,提取效果较好,但该算法计算复杂、计算量大,其算法逻辑不适于硬件实现,对超过1百万像素的大面阵数字图像,实时处理性能不佳。文献[8]提出根据距离的固定权值与区域最大值背景预测综合应用的方法,可在星图中存在局部高亮区域条件下得到较好的提取结果,但其判断是否用最大值背景预测的梯度阈值不易确定,从而影响了算法效果。本文以背景估计为基础,针对星敏图像处理提取星点的特征,设计了一种兼顾杂散光与噪声抑制的背景估计掩模,形成一种流水线作业的星图处理方法——背景滤波,上述掩模建立在星点模型的基础上,有极强的针对性,具备在背景估计中完好保留星点的能力,同时可稳定抑制杂散光干扰,有效分割目标与背景。
1 星图特征分析
对星图特征进行分析,说明目标、背景、噪声三者之间的关系和特点。
1.1 星点特征
由于星点质心计算精度需要,一般采用离焦的方法使星点弥散为近圆形的光斑。理想星点像斑的能量分布可用二维高斯分布近似[9]。受探测器灰度量化限制,亮星成像将表现去顶高斯分布的特征,可表示为

(1)

1.2 背景特征
常态工况下,星图背景分布均匀,并伴随大量随机噪声。一般星敏在轨工作时间越长(或所处环境温度越高),噪声的能量均值就越高,目标与背景、噪声呈叠加关系,三者相互独立,具有可分割性,满足
G(x,y)=S(x,y)+B(x,y)+N(x,y).
式中:G(x,y)为某点灰度值;S(x,y)为星点在该点处的灰度值;B(x,y)为该点背景灰度;N(x,y)为该点叠加的随机噪声。
目标、背景、噪声三者间的关系如图2所示。当受杂光干扰时,星图背景分布的均匀性被破坏,呈缓慢过渡趋势。当有月球或太阳存在时,光源在图像中的成像近似一个大半径的高斯去顶分布。噪声随机叠加在背景之上。特别的,月球或太阳可能在成像时产生光环或光带,成为背景中的高频部分。
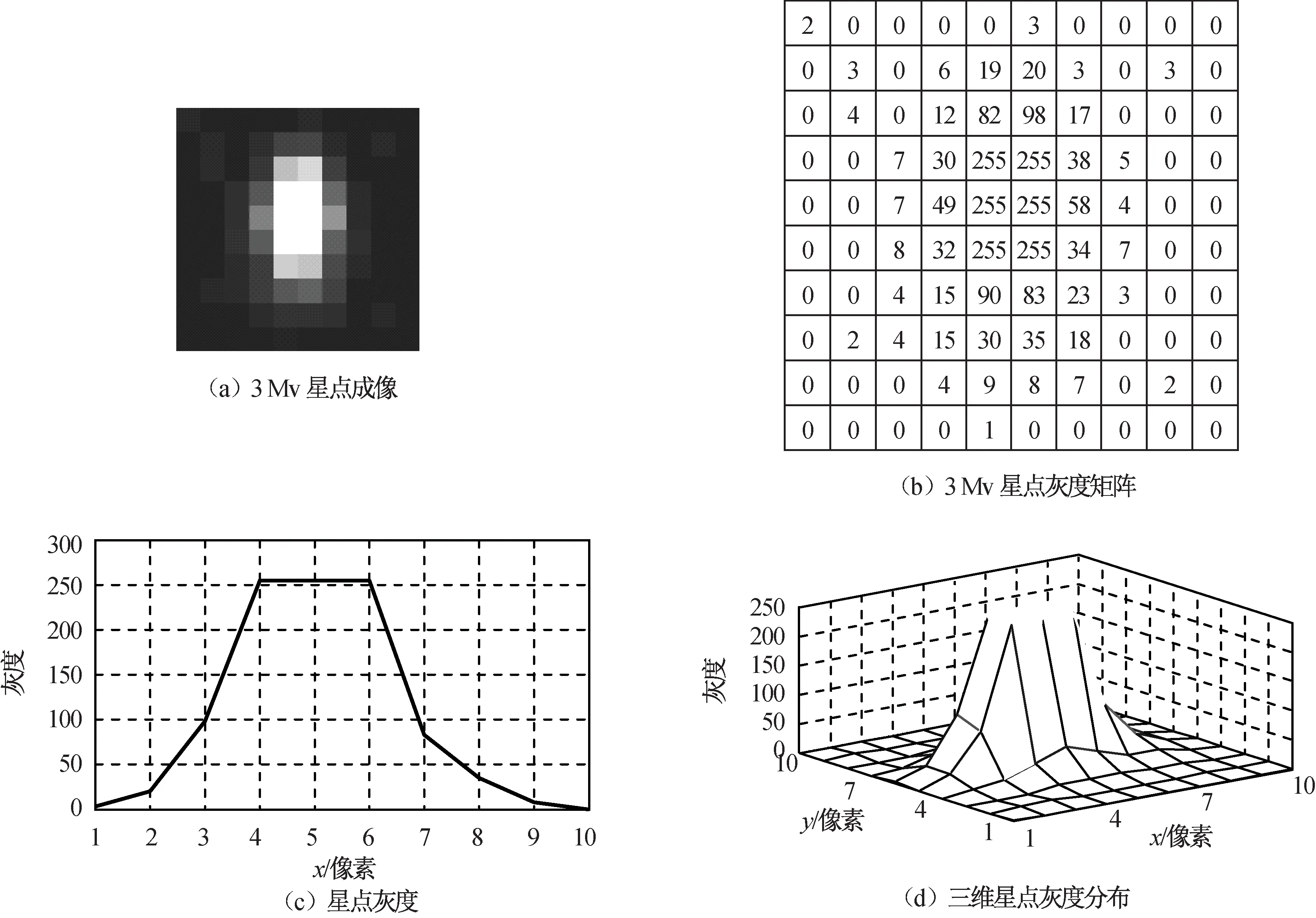
图1 星点像斑特征Fig.1 Features of star spot
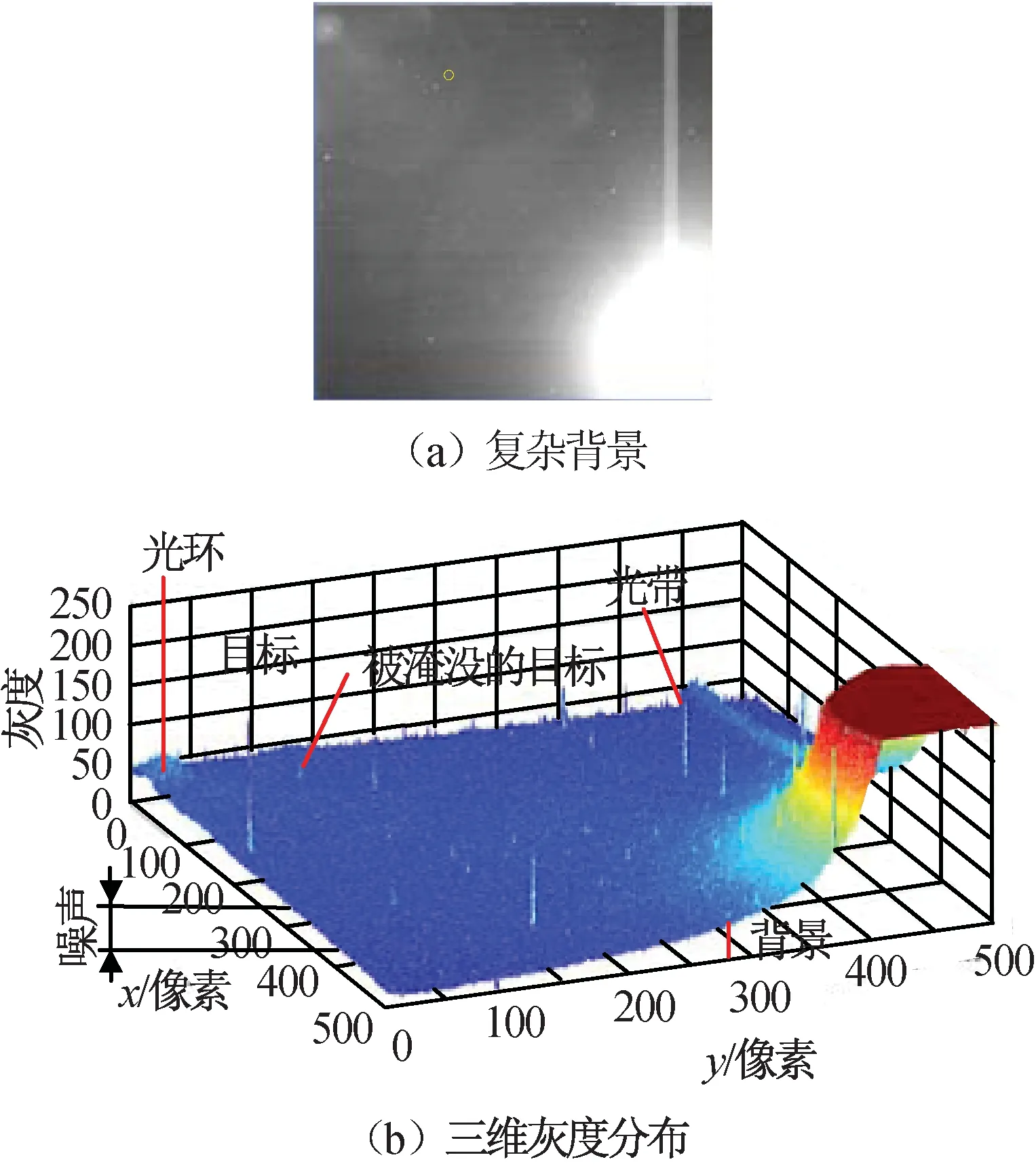
图2 杂散光干扰时星图特征Fig.2 Features of star image with stray lights
2 背景滤波
星图中目标与背景具有独立的特性,使采用背景估计法分割星图成为可能[8]。背景估计法建立在空域滤波理论的基础上,先以某种权值模板遍历一次原始图像I,得到估计的图像背景
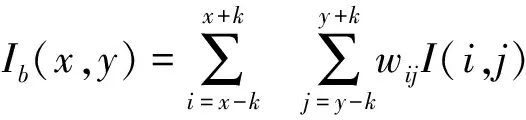
(2)
再将两者作差得到残差图像
It=I-Ib,
(3)
理想情况下残差图像中仅保留目标和少量高频噪声[10]。此处:Ib(x,y)为背景估计得到的某一像素灰度值;k为模板半径;I(i,j)为原始图像在模板内某点,i,j分别为该点行、列坐标;wij为其对应权值;It为残差图像。
在此基础上,本文对背景滤波算法进行改进,具体如下。
a) 针对星点特征的模板设计
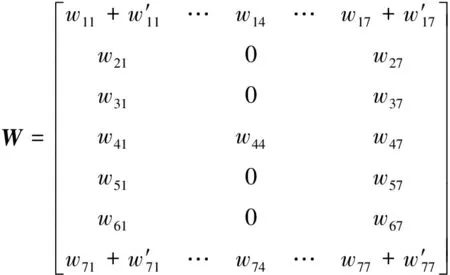
由上述分析可知:星斑大小可达8×8像素,综合考虑星点边缘保留与算法FPGA实现中所需数据缓存量,将模板尺寸定为7×7像素,即k=3,此为边缘保留较好前提下的最小尺寸,所需数据缓存最少。同时,为更好地保留星点边缘,设计特别采用模板边缘估计中心点背景,有
W=

(4)
式中:W为背景滤波模板;wij=w11,w12,…,w77为各点对应权值。式(4)表明在7×7像素范围内,以边缘像素的均值作为背景的估值。
b) 背景残留的抑制

(5)
可更好地评估背景,且局部适应性更强。
将式(5)代入式(2),由式(2)、(3)可得背景滤波残差图像。
c) 残差图像的分割与提取
在背景滤波得到的残差图像中,含部分类似星点形状的虚警目标。但此类虚警目标普遍灰度值较低,像素灰度值间差值较小,目标小于5个像素。鉴于此类虚警目标的特征,选定一较小的固定阈值,可较好地分割星点与虚警点且通用性强,即

(6)
式中:k=3;Is为分割图像;T为分割阈值,与探测器种类有关,工程中一般取T=0~5。
按此处理后,噪声水平低的图像即能良好提取星点;噪声水平高的图像则可舍弃其中单点/双点目标,进一步降低虚警率。因为这类目标多为单粒子翻转(SEU)引入的盐噪声,去噪后得到目标图像。
上述背景滤波算法的流程如图3所示。

图3 背景滤波流程Fig.3 Flowchart of background-filter algorithm
本文提出的背景滤波算法是典型的基于卷积核的图像处理算法。设卷积核尺寸为7×7像素,则对每个像素,卷积运算需完成乘法5次、加法运算30次,对分辨率为n×n像素的数字图像,算法的时间复杂度为O(n2)。采用FPGA基于并行方式实现图像卷积运算,可使像素吞吐率优于50 Mpix/s,以4 Mpix分辨率的星图为例,其处理能力优于12.5帧/秒,可满足星敏感器姿态测量实时性要求[11]。
3 仿真与分析
基于星敏感器外场观星或在轨实际拍摄的星图,对算法性能进行对比验证,重点分析抗杂光性能。选取典型月光和太阳光干扰下,不同噪声水平的星图进行仿真对比,分别用分块阈值分割法、高通滤波法和背景滤波法处理,比较三种方法的提取性能[1、10]。为便于识别,以下处理结果均以反向二值化呈现,即背景为白色、目标为黑色,红色圆圈为正确分割的星点,蓝色方框为虚警目标。处理结果如图4~6所示。图4(a)为某APS星敏地面观星时对月拍摄的星图,月光进入视场使星图受到光晕污染,背景灰度均值为95(量程256),远高于未受干扰时的14,且呈辐射状分布,月球附近星点受污染严重,对比度降低。图5(a)为某CCD地面观星拍图,图中月光污染大面积星图并产生环状光晕。图6(a)为某CCD星敏在轨受太阳光干扰时拍图,太阳位于视场左侧,背景灰度从左至右递减;在轨运行数年后,受辐射影响,噪声水平较高。
用星点提取率、虚警率、星点像素总数三个指标表征处理方法的性能,定义如下:
a)星点提取率表征算法整体提取能力。对一幅特定的星图及处理结果,设星敏探测极限星等内正确提取星点数为Nd,对应天区在探测极限星等内存在的星数为Sd,则星点提取率
Re=Nd/Sd.
(7)
b)虚警率表征算法抗干扰的能力。设错误提取目标数为Na,提取目标总数为Ne,则虚警率
Ra=Na/Ne.
(8)
c)星点像素总数为正确提取到的星点保留的像素总量,表征算法的目标保留能力。
用上述3项指标衡量处理效果,结果见表1。表中:(a)、(c)组探测器设计探测6.00等星;(b)组探测器设计探测6.50等星。星图处理结果统计见表2。
由图4~6分块阈值法处理后结果和表1可知:所得图像严重受月光影响,月晕区域存在大量错误分割残留的背景,虚警率分别高达95.30%,79.13%,76.92%。
由图4~6高通滤波法和背景滤波法处理结果和表1可知:两种滤波算法的提取效果及抗杂光能力均优于分块阈值法,背景滤波提取率普遍高于高通滤波,均大于40%,且星点边缘保留较好,提取星点像素总数较多;同时在高噪和低噪水平,虚警率均控制在小于15%,高通滤波可达46.36%。
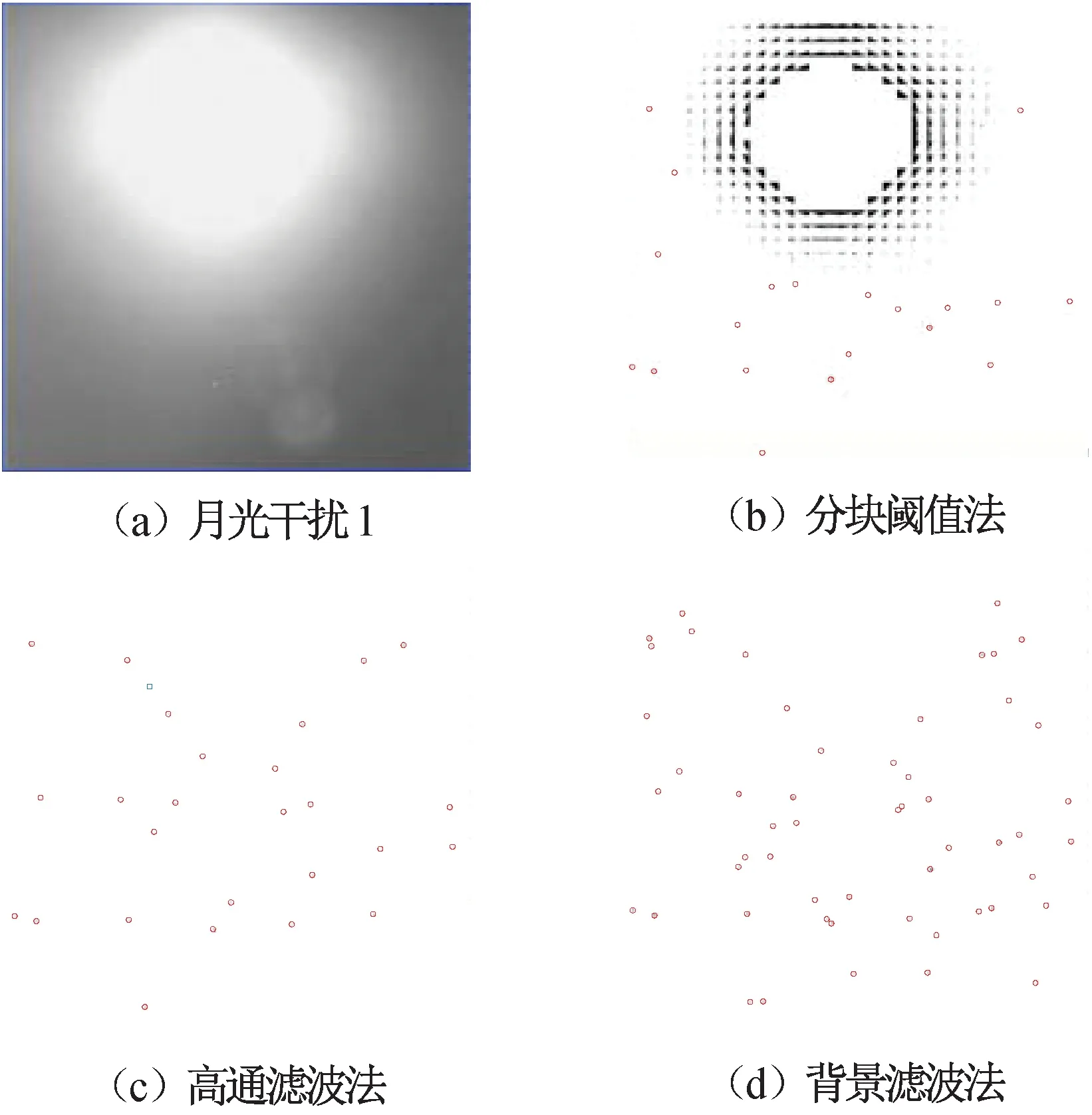
图4 低噪水平月光干扰星图及其处理结果Fig.4 Low-noise star images with moon lights and process results

图5 高噪水平月光干扰星图及其处理结果Fig.5 High-noise star images with moon lights and process results

图6 太阳光干扰星图及其处理结果Fig.6 Star images with solar lights and process results
由上述不同条件下的实验结果可认为:与分块阈值法、高通滤波法相比,背景滤波表现出良好的抗杂光能力,在太阳、月球进入探测器视场的条件下,背景滤波星点提取率平均达到48.46%,能满足全天捕获、姿态确定的需要,利于提高姿态稳定性,考虑高噪工况,平均虚警率也可控制在5.26%。

表1 星图处理结果

表2 星图处理结果统计
4 结束语
本文设计了一种用于星敏抗杂光的背景滤波算法。针对星点特征设计滤波模板,在以均值评估背景的基础上,该算法创新性地添加多处背景抑制因子,用设计的模板滤波获得背景图像,将其与原始星图差分即可滤除低频背景,辅以分割和单双点噪声
滤除得到仅含目标的星图。用多种杂光干扰的星图进行了实验对比,结果表明背景滤波法虚警率明显下降,平均降幅20%以上,同时星点提取率也有所提升。本文方法的优点是:虚警率低,提取率高;运算方法简单,便于FPGA实现;通用性良好,不仅可处理不同条件下的杂光干扰,而且能在常态工况中使用;抗杂光性能优异,为应对杂光干扰造成的跟踪丢失,提供了一条有效的解决途径。本文提出的算法无需先验信息,与星图识别及星跟踪算法模块数据交互简单,利于提高帧频,为提高星敏动态性能奠定基础。后续可利用FPGA并行计算的优势实现本算法,并将算法封装为独立IP核,形成可适应高动态星敏感器需求的“杂光抑制—去噪—星点质心提取”快速图像处理流水线。
[1] 毛晓楠, 梁为升, 郑循江. 基于并行运算体系结构的星敏感器图像处理算法[J]. 宇航学报, 2011, 32(3): 613-619.
[2] 李晓云, 杜伟, 刘付强, 等. 基于STK的星敏感器在
轨视场仿真分析[J]. 航天器工程, 2013, 22(2): 27-31.
[3] LIEBE C C. Star trackers for attitude determination[J]. IEEE AES Systems Magazine, 1995(6): 10-16.
[4] 唐勇, 卢欣, 郝云彩. 星敏感器杂光抑制分析[J]. 航天控制, 2004, 22(3): 58-61.
[5] 郑循江. 轻小型高动态星敏感器技术研究[D]. 上海: 上海交通大学, 2012.
[6] 魏长安. 红外小目标检测与跟踪算法研究[D]. 哈尔滨: 哈尔滨工业大学, 2009.
[7] 王雪梅, 黄自力, 王德胜. 红外弱小目标的单帧捕获[J]. 红外与激光工程, 2006, 35(S1): 99-104.
[8] 王洪涛, 罗长洲, 王渝, 等. 基于背景自适应预测的星点提取算法[J]. 光学技术, 2009, 35(3): 412-414.
[9] 张新宇, 郝云彩. 星敏感器星点能量分布数学模型及其对精度的影响分析[J]. 空间控制技术与应用, 2013, 39(3): 14-23.
[10] GONZALEZ R C, WOODS R E. Digital image processing[M]. 北京: 电子工业出版社, 2005.
[11] 王建庄. 基于FPGA的高速图像处理算法研究及系统实现[D]. 武汉: 华中科技大学, 2011.
Study on Image Process Method of Star Tracker for Stray Lights Resistance Filtering Based on Background
YU Lu-wei1, 2, MAO Xiao-nan1, 2, JIN He1, 2, HU Xiong-chao1, 2, WU Yong-kang1, 2
(1.Research and Development Center of Infrared Detection Technology, CASC, Shanghai 201109, China; 2. Shanghai Institute of Spaceflight Control Technology, Shanghai 201109, China)
In order to improve stray lights resistance of star tracker, a global filtering image process method which was named background-filter was proposed in this paper. According to features of star and background, the background-filter algorithm was improved. The mask was set with 77 pixel. The mean pixel value at the edge of the mask was served as the value of background estimation. The weights of the star were added to restrain background at positions far away from the center of mask. A small threshold value was set to segment the star and false alarm point and single/double noise filter was also applied. The algorithm flowchart fitting for parallel process in FPGA was designed. The simulations results based on star images with stray lights on kinds of noise levels showed that the improved background filter had better stray lights resistance, lower alarm ratio and higher star detection ratio than either block threshold method or high-pass filter method, and the algorithm proposed was simple and adaptive to be realized by FPGA as well as fitted to both stray lights and no stray lights.
Star tracker; Star detection; Stray lights resistance; Image process; Background-filter; Background estimation; Mask; Alarm ratio
1006-1630(2016)04-0026-06
2016-05-23;
2016-07-16
总装备部高分辨率对地观测系统重大专项资助(GFZX0401300206)
余路伟(1992—),男,硕士生,主要从事星敏感器图像处理研究。
V448.2; TP391.41
A
10.19328/j.cnki.1006-1630.2016.04.005
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
军事文摘(2022年12期)2022-07-13
飞控与探测(2020年3期)2020-07-16
空间控制技术与应用(2020年6期)2020-04-28
北京航空航天大学学报(2019年9期)2019-10-26
综艺报(2019年15期)2019-08-16
现代装饰(2019年7期)2019-07-25
电子制作(2019年9期)2019-05-30
北京航空航天大学学报(2019年4期)2019-05-05
电子制作(2018年16期)2018-09-26