基于液压平衡的试油试采系统建模与仿真
2016-12-19 05:06赵鹏宇陈英龙
浙江大学学报(工学版) 2016年4期
赵鹏宇, 陈英龙, 孙 军, 周 华
(1.浙江大学 流体动力与机电系统国家重点实验室,浙江 杭州 310027;2.辽河油田分公司钻采工艺研究院,辽宁 盘锦 124000)
基于液压平衡的试油试采系统建模与仿真
赵鹏宇1, 陈英龙1, 孙 军2, 周 华1
(1.浙江大学 流体动力与机电系统国家重点实验室,浙江 杭州 310027;2.辽河油田分公司钻采工艺研究院,辽宁 盘锦 124000)
根据试油试采工况的特点与需求,提出采用液压泵/马达作为平衡配重的移动式试油试采系统. 试油试采系统采用开关磁阻电机作为主驱动电机,采用液压泵/马达和蓄能器作为配重.在下冲程时将抽油杆势能和主驱动电机输出的能量储存,在上冲程时将储存的能量释放,液压泵/马达和蓄能器组成的配重与主驱动电机共同提升抽油杆.利用质量集中法,将试油试采系统简化为三质量二联结系统,建立系统动力学模型,通过Simulink仿真得到系统动力学特性,包括抽油杆位移和速度、液压系统压力以及主驱动电机的功率.通过分析仿真结果可知,系统满足试油试采作业对于冲程冲次的要求;通过液压平衡配重提高了能量利用率,可以减小系统装机功率64.3%;电机运行工况得到改善,不对负载提供阻力矩,无负功工况,减小了对电力系统的冲击;系统结构紧凑,集成度高,便于运输.
试油试采;液压平衡;动力学模型;Simulink仿真
试油试采作为石油开采过程的关键环节之一,对于油田开发具有重要作用.试油是利用一套专用的设备和方法,降低开采井内液柱压力,诱导地层中流体进入油井内并取得流体产量、压力、温度、流体性质、地层参数等资料的工艺过程.试采是对油田进行小规模或短时间的生产.试油试采的目的是探明某区域是否存在工业性油气流,验证储层的含油气面积和油水边界以及油藏的产油能力,取得各分层测试资料及流体性质,为计算油田储量和编制开发方案提供依据.试油试采系统的核心是冲程、冲次可调的移动式抽油机.
近年来,我国油田产液量的提高愈发依赖于长冲程、低冲次的开采工艺[1].一些单位通过对抽油机液压系统进行改造,提出几种液压抽油机设计方案.提出的设计方案主要包括液压缸驱动式抽油机,如吉林工业大学提出的液压缸驱动平衡式液压抽油机;液压泵/马达驱动式抽油机,如兰州石油机械研究所研制的液压泵/马达结构抽油机、胜利油田提出的一种液压泵-液压马达结构方案的齿轮齿条长冲程液压抽油机;电机驱动式抽油机[1-3].对于液压抽油机节能特性的研究愈发深入,吉林大学通过设计抽油机节能控制器,可以将电机平均损耗降低15%~30%[4],东北大学及胜利油田等单位通过设计液压系统回收能量,可以使抽油机功率降低30%~40%[5-6].美国、俄罗斯、法国、加拿大等国家对液压抽油机研制处于领先地位,并已形成产品系列[7-10].这些研究改善了抽油机的运行参数,提高了系统整体产量,达到了一定的节能效果,但在抽油杆速度和位移的控制精度、能量回收效率等方面存在较大的提升空间.现有试油试采设备的体积较大,难以快速移动,不适用于试油试采作业.
本文提出基于液压平衡的试油试采系统,利用开关磁阻电机作为主驱动元件,液压泵/马达和蓄能器组成配重系统,主驱动元件和配重系统共同作用,驱动绞车通过钢丝绳带动抽油杆往复运动.建立系统的数学模型,得出系统响应特性,并进行仿真分析.通过计算及仿真可知,本文所述系统具有较高的控制精度,进一步提高了能量回收效率.同时,系统结构紧凑,可以集成于撬装底座上,提高了系统的机动性能.
1 系统原理
移动式试油试采系统利用液压系统将电机的输出能量转化为抽油杆往复运动的动能及油井内油液增加的势能,而液压系统由于结构较复杂、存在内、外泄漏及节流损失等因素,传动效率和可靠性不高.
采用电机直接驱动系统工作,可以减少传动过程的能量损失;简化系统,提高可靠性;采用控制器对电机进行控制,提高控制精度.试油试采系统最终需要实现抽油杆的上下往复运动,因而采用电机直接驱动抽油杆动作,须利用绞车作为动作转换装置,将电机的旋转运动转换为直线运动.为了回收能量、减小系统装机功率,可以采用液压泵/马达和蓄能器组成的液压系统作为配重回路.该方案要求电机长期、频繁换向工作,对电机要求较高.试油试采系统原理简图如图1所示.
该系统的主要执行元件包括两部分:主驱动元件和平衡元件. 主驱动元件为开关磁阻电机连接减速器,平衡元件为泵/马达连接减速器. 绞车采用双出轴结构,电机和泵/马达分别置于绞车的两端.
上冲程时,泵/马达工作于马达工况,与开关磁阻电机共同驱动绞车,使抽油杆上升;下冲程时,泵/马达工作于泵工况,将开关磁阻电动机输出的能量和抽油杆下降时的势能回收储存于蓄能器中.该部分能量可以在上冲程中释放,以降低系统装机功率.

1-油箱;2-电磁卸荷阀;3-泵/马达;4-行星齿轮减速器;5-绞车;6-行星齿轮减速器;7-开关磁阻电机;8-蓄能器;9-截止阀;10-压力表;11-压力变送器;12-单向阀;13-电磁换向阀;14-双联叶片泵;15-吸油过滤器;16-电机;17-回油过滤器;18-风冷冷却器图1 试油试采系统原理简图Fig.1 Principle diagram of well test and production test system
2 动力学模型
试油试采系统的上冲程利用电机和柱塞泵/马达共同驱动绞车作旋转运动,绞车带动钢丝绳,在抽油支架的支承下带动游车大钩和抽油杆上升;下冲程利用负载通过绞车与电机共同驱动泵/马达为蓄能器充液.将绞车与游车大钩组成的系统以及游车大钩与抽油杆组成的系统简化2个为质量-弹簧-阻尼系统.利用质量集中法,将系统简化为三质量二联结系统.简化模型如图2所示.
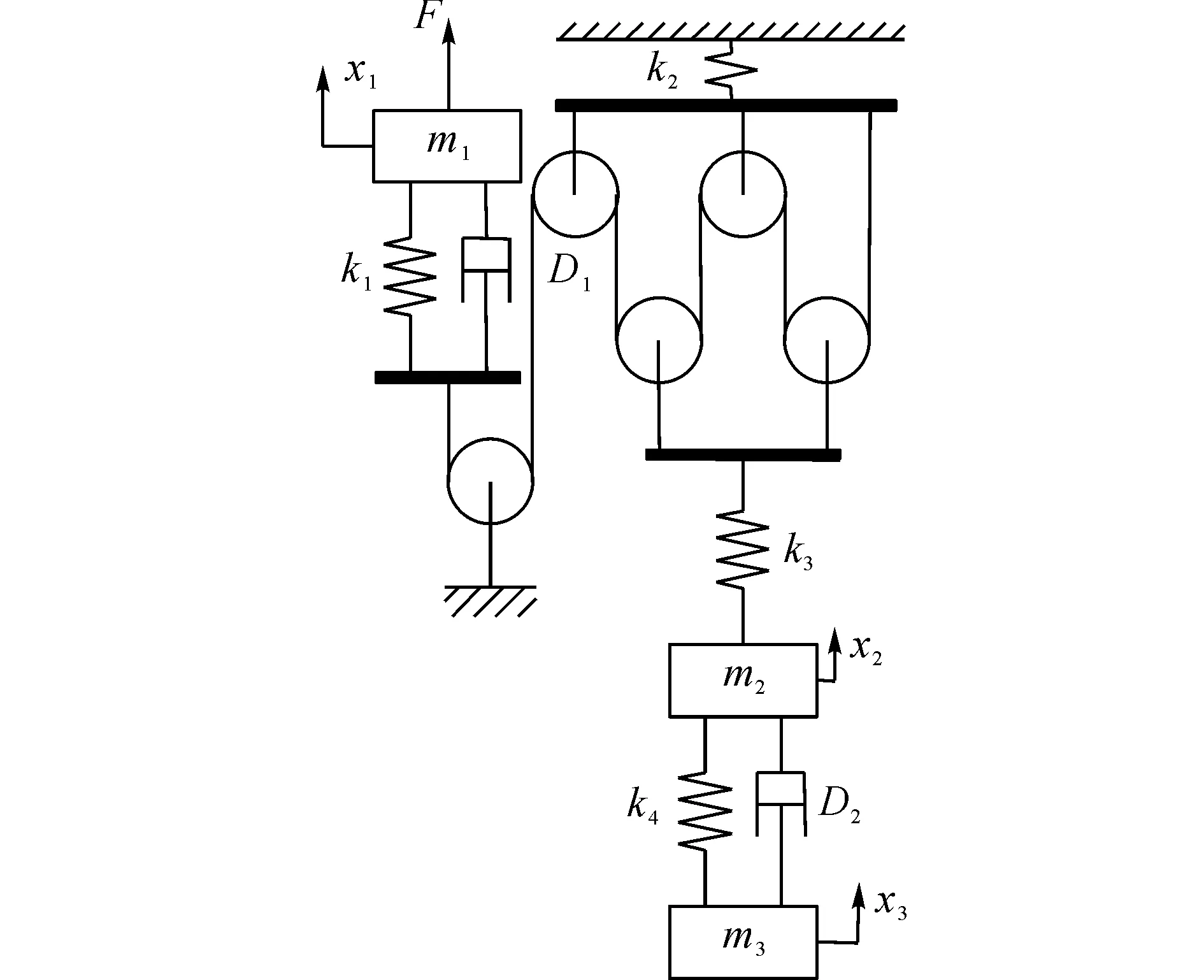
图2 起升系统简化模型Fig.2 Simplified model of hoisting system
图2中,m1为绞车滚筒折算于滚筒半径上的质量,由于绞车作旋转运动,绞车滚筒折算于滚筒半径上的质量只计算惯性质量,而不计重力质量;m2为游车大钩及快绳折算的质量之和;m3为抽油杆及悬绳的折算质量之和;k1为快绳弹性刚度;k2为抽油支架弹性刚度;k3为动滑轮与游车大钩之间钢丝绳的弹性刚度;k4为游车大钩与抽油杆之间钢丝绳的弹性刚度;D1为绞车、快绳、滑轮等所受阻尼;D2为抽油杆所受阻尼;F为驱动力,为电机与液压泵/马达作用在绞车上合力矩的等效力.
快绳中张力可以表示为

(1)
式中:n为有效绳数.

(2)
根据简化模型可得系统运动微分方程组为
(3)
式中:
(4)
其中Ir为绞车滚筒转动惯量,Dr为滚筒直径;
m2=Lfρf+mh,
(5)
其中Lf为快绳长度,ρf为快绳每米质量,mh为游车大钩质量;
m3=Lwρw+ms,
(6)
其中Lw为抽油杆悬绳长度,ρw为抽油杆悬绳每米质量,ms为抽油杆质量.
令

(7)
则起升系统运动与动力学微分方程组可以整理为
(8)
式(8)为由质量集中法所求得的系统动力学模型. 式中,驱动力F由电机和液压泵/马达的输出转矩共同决定. 电机输出转矩可以根据负载调节,设为Tm. 对于轴向柱塞液压泵/马达,若忽略柱塞侧向力引起的摩擦力和回程弹簧在斜盘上的反力,则只考虑液压力所引起的斜盘反力相对于X轴(见图3)产生的力矩总和,即为液压马达的输出转矩.
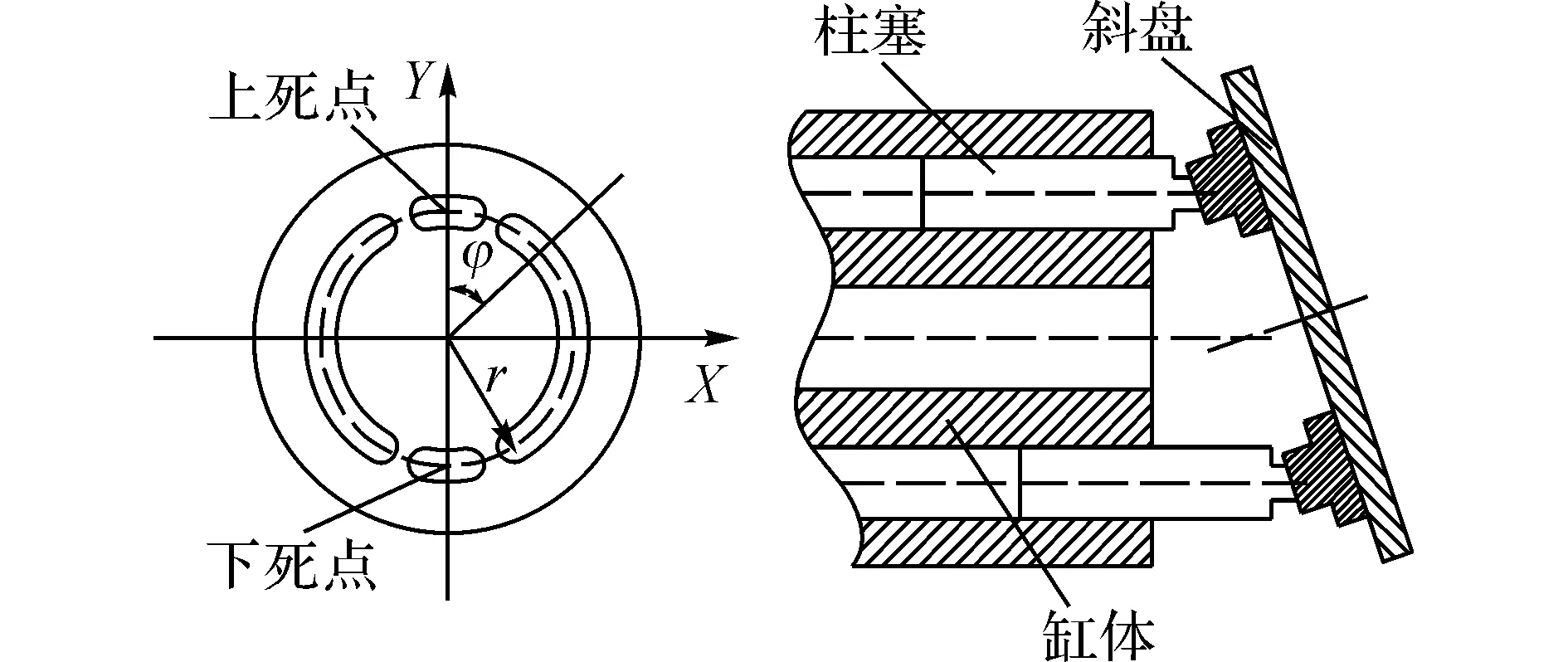
图3 轴向柱塞泵/马达运动学原理图Fig.3 Kinematic diagram of axial piston pump / motor
液压泵/马达的瞬时转矩可以表示为
(9)

(10)
当绞车等效位移为x1时,蓄能器内气体体积为

(11)
式中:V0为初始状态蓄能器内气体容积;i1为泵/马达端减速器减速比;sp为柱塞行程,sp=2rtanγ.
配重系统采用蓄能器为柱塞泵/马达提供压力,当蓄能器作为能源使用,且吸收和排出液体速度较慢时,可以认为是等温过程. 取p0为初始状态蓄能器内充气压力,则绞车等效位移为x1时的蓄能器中油液压力为

(12)
泵/马达转子转过角度为

(13)
液压泵/马达瞬时转矩可以表示为
(14)
驱动力F可以表示为
(15)
式中:i2为电机端减速器减速比.
通过对系统机械结构及柱塞泵/马达建立数学模型,系统动力学方程可以由式(8)、(14)、(15)共同确定.
3 仿真分析
Simulink是MATLAB软件中的一种可视化仿真工具,可以实现动态系统的建模、仿真和分析. 由于系统动力学模型中含有非线性环节,为了计算系统的传递函数,对液压泵/马达转矩进行简化,利用平均转矩代替瞬时转矩,即

(16)
对平衡转矩进行线性化近似,在平衡点附近泰勒展开,并忽略二阶及二阶以上部分,可得

(17)
得到起升系统传递函数,如图4所示.图中,
(18)
根据国内某油田的实际工况可知,该试油试采系统应满足如下技术指标:最大冲程S=5 m,最大冲次N=3次/min,上冲程载荷Qu=140 kN,下冲程载荷Qd=40 kN. 在已知冲程冲次时,不同的速度规划曲线决定了抽油杆的最大提升速度,从而决定驱动功率. 该系统采用梯形速度曲线,如图5所示. 上冲程时间和下冲程时间相等. 则上冲程时间为tu=10 s. 梯形速度曲线规划为:加速和减速阶段的行程为总行程的0.1倍,加速和减速时间为tacc,则有

图4 起升系统传递函数Fig.4 Transfer function of hoisting system

图5 梯形速度曲线Fig.5 Trapezoidal velocity curve
(19)
0.5vtacc=0.1S,
(20)
atacc=v.
(21)
由式(19)~(21)可知,v=0.6 m/s,a=0.36 m/s2,tacc=1.67 s.
试油试采系统驱动力及配重计算如下.
在试油试采过程中,上、下冲程载荷之差决定了有效驱动载荷,主驱动电机的功率应与之相匹配.在该系统中,按照最佳平衡原则进行设计,上、下冲程时平衡力均为定值,通过改变主驱动力方向实现上、下冲程系统的受力平衡,即上冲程主驱动力、平衡力之和与上冲程载荷相等,下冲程主驱动力、下冲程载荷之和与平衡力相等.当平衡力或载荷发生变化时,可以通过调节主驱动力实现受力平衡.由实际工况可知,上冲程载荷Qu=140 kN,下冲程载荷Qd=40 kN.设主驱动力为F1,平衡力为F2,则上、下冲程系统的受力情况如图6所示.

图6 起升系统受力示意图Fig.6 Force diagram of hoisting system
由图6可知,上冲程时
F1+F2=Qu.
(22)
下冲程时
F2-F1=Qd.
(23)
故主驱动力为F1=50 kN,F2=90 kN.
利用Simulink软件对系统传递函数进行仿真,可得抽油杆位移s、速度v响应曲线如图7、8所示.

图7 抽油杆位移曲线Fig.7 Displacement curve of sucker rod
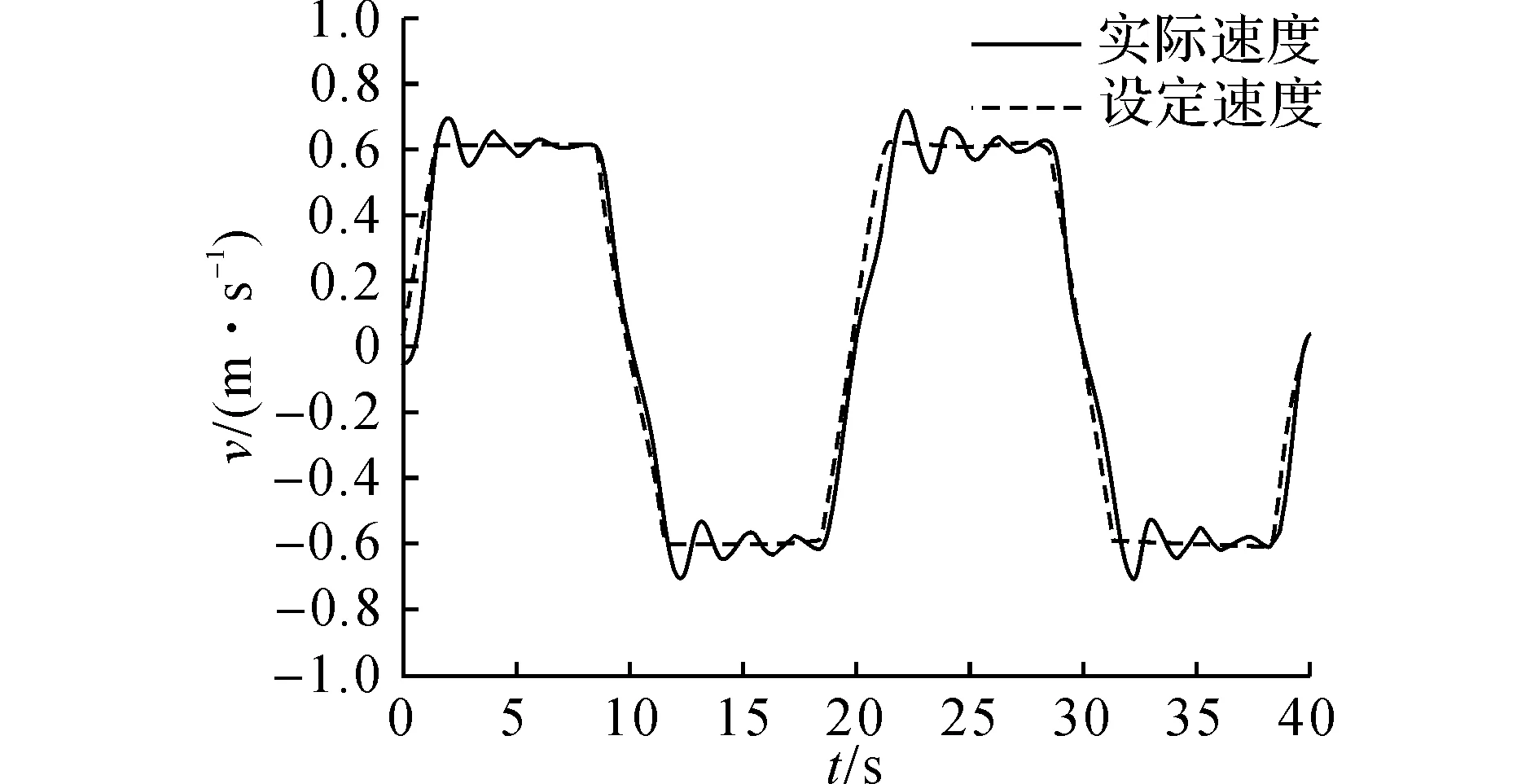
图8 抽油杆速度曲线Fig.8 Velocity curve of sucker rod
当电机输出线速度为图5所示的梯形速度曲线时,抽油杆最大行程约为5.1 m,最大速度约为0.6 m/s,运动周期为20 s,行程与周期均满足冲程冲次要求. 系统响应较快,抽油杆速度曲线与预设梯形曲线相比滞后很小,约为0.3 s. 由位移曲线可以看出,抽油杆实际位移与设定位移存在偏差,偏差约为2%;由速度曲线可以看出,抽油杆运动速度稳定性较差,存在速度波动,波动频率约为0.5 Hz,幅值约为0.2 m/s. 速度波动使抽油杆实际行程大于设定行程,引起速度波动的原因是系统固有振动.仿真模型中的各参数均处于理想状态,而实际工况中由于系统各部分质量、弹性刚度等参数的偏差以及载荷变化和环境影响等原因所带来的系统误差和随机误差会增加抽油杆位移与速度与设定值的偏差.
为了减小抽油杆行程和速度的误差,同时减小速度波动幅值和恢复时间,可以对抽油杆运动速度进行PID控制.
PID控制器是一种线性控制器,它根据给定值与实际值之差构成控制偏差,控制规律为

(24)
式中:KP为比例系数,TI为积分时间常数,TD为微分时间常数.3个参数常采用Ziegler-Nichols法进行整定. 将系统近似看作一阶惯性环节和延迟环节,根据系统负载惯性较大、延迟时间较长的特点,可以采用PI控制算法. 抽油杆运动速度的阶跃响应如图9所示.
由图9可知,延迟时间τ=0.5 s,惯性时间常数T=2.2 s,放大系数K=6,则

(25)

(26)
PID控制以抽油杆实际速度与规划速度之差作为反馈量,电机转速作为输出量. 加入PID控制后的抽油杆位移和速度响应曲线如图10、11所示.
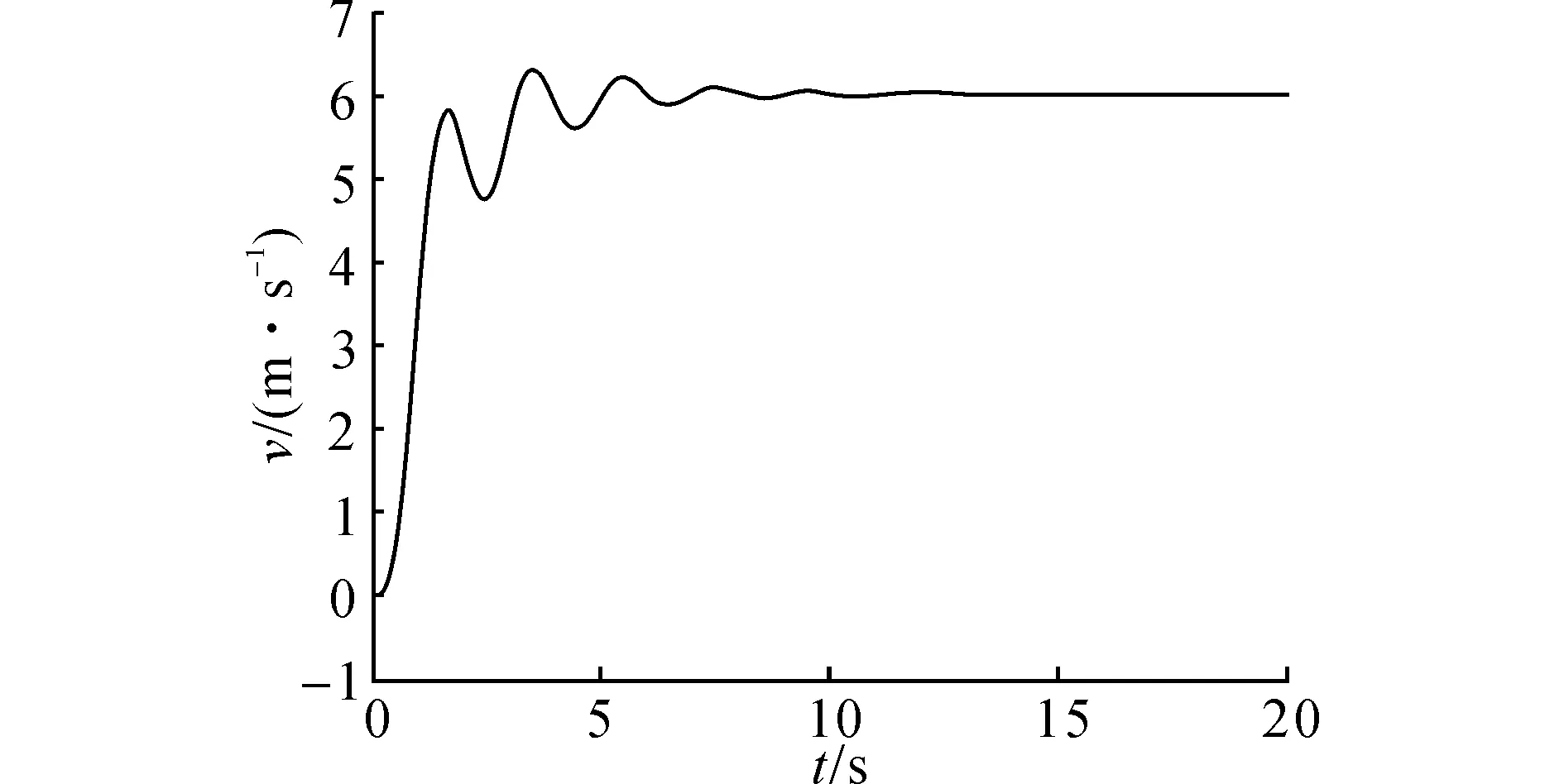
图9 抽油杆速度阶跃响应曲线Fig.9 Velocity step response curve of sucker rod

图10 PID控制抽油杆位移曲线Fig.10 Displacement curve of sucker rod with PID controller
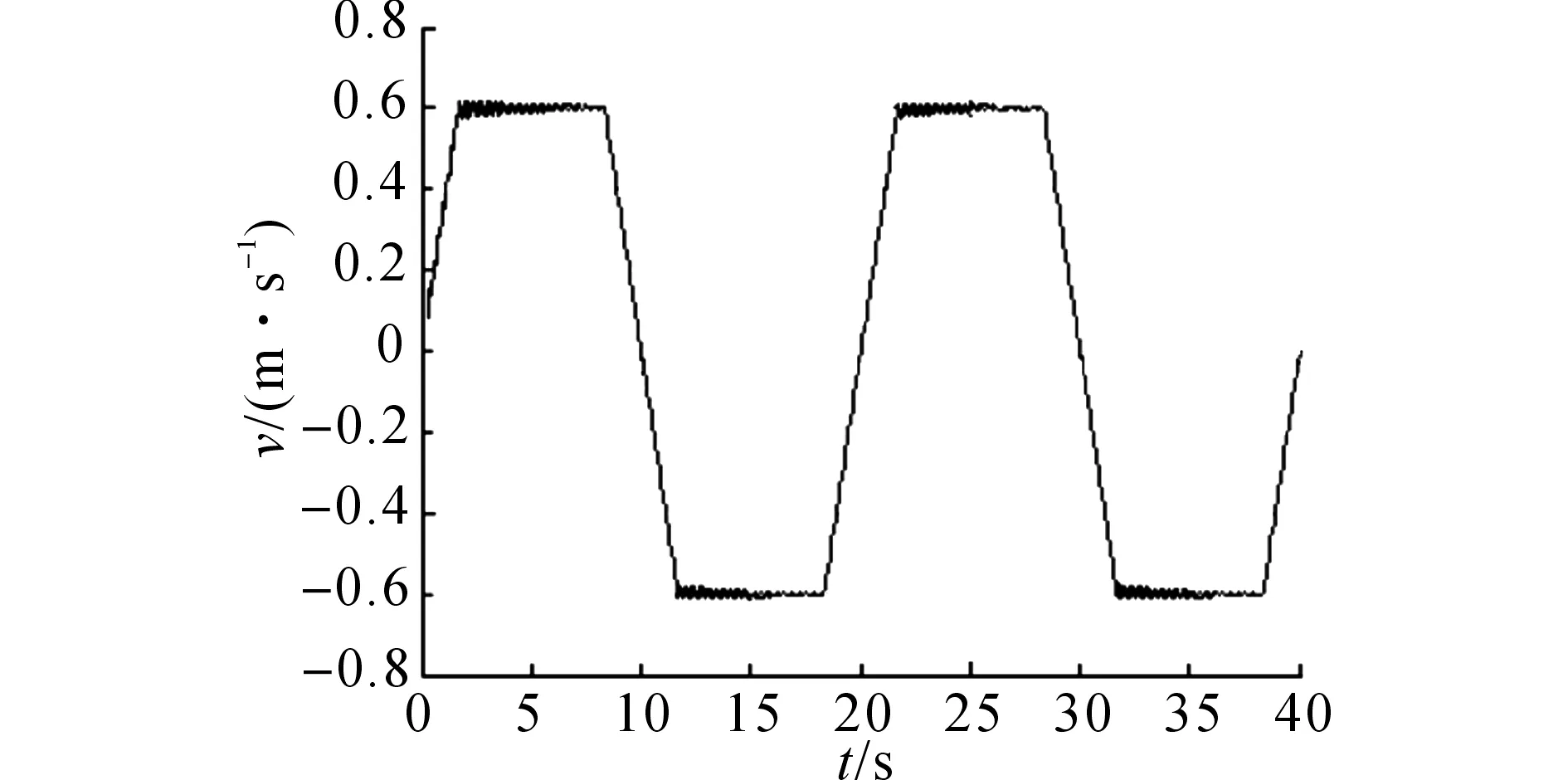
图11 PID控制抽油杆速度曲线Fig.11 Velocity curve of sucker rod with PID controller
由图10、11可知,经过PID调节后抽油杆的最大行程约为5.0 m,最大速度约为0.6 m/s,运动周期为20 s. 与无PID控制工况下的位移、速度曲线相比,抽油杆行程误差明显减小,运动速度有一定的波动,但幅度减小为0.05 m/s. 抽油杆实际位移、速度与规划位移、速度更接近,抽油杆运动速度可以较好地跟随电机输出转速,没有形成较大冲击,满足试油试采要求.
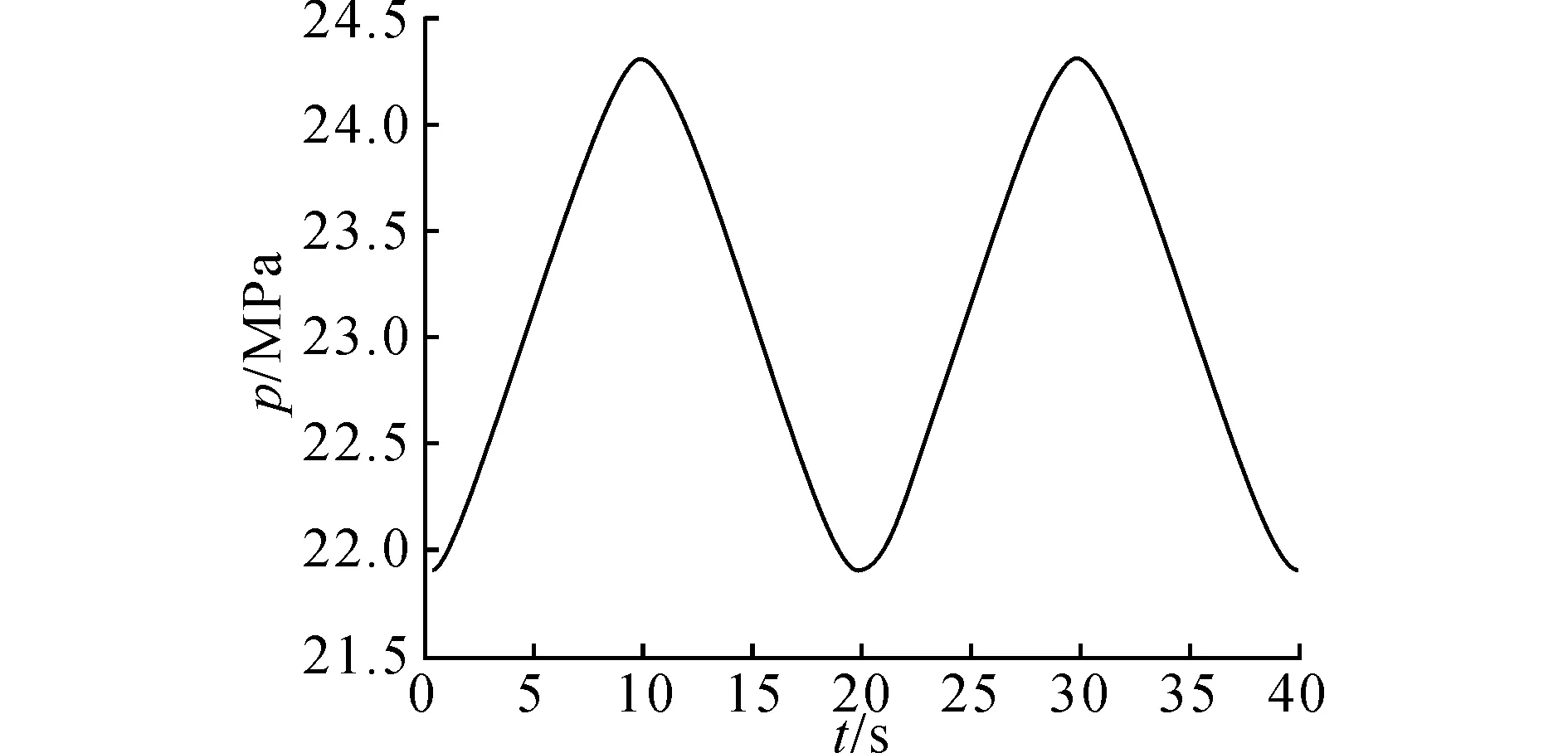
图12 液压系统压力变化曲线Fig.12 Pressure change curve of hydraulic system
液压系统的压力p变化曲线如图12所示. 可以看出,在正常工作过程中,液压系统压力为21.9~24.3 MPa,变化范围在9.88%,属于蓄能器的正常工作范围. 液压马达输出力矩与系统压力成正比,最大输出力矩为622 N·m,最小输出力矩为561N·m.在实际运行中,当液压系统由于泄漏的原因导致压力过低时,由补油泵向蓄能器内加压;当液压系统压力过高时,溢流阀开启,使系统压力降低,从而保证液压系统压力稳定在设定范围内.
根据前述计算所得的驱动力及速度规划,主驱动电机的理论功率为
P=F1v=30 kW.
(27)
在无配重工况下,主驱动力为悬点最大载荷,即Fu=140 kN. 此时系统主驱动电机的理论功率为
P′=Fuv=84 kW.
(28)
由式(27)、(28)可知,采用液压平衡配重可以使系统主驱动电机功率下降64.3%. 对电机输出功率进行仿真,可得如图13所示的功率曲线.

图13 电机输出功率曲线Fig.13 Output power curve of motor
由图13可以看出,当系统中加入配重时,电机输出平均功率约为30 kW,最大输出功率约为38 kW. 在理想状态下,上冲程和下冲程中电机功率基本相同. 在无配重工况下,上冲程电机做正功,输出平均功率为85 kW,最大输出功率约为110 kW;下冲程时电机做负功,输出平均功率约为25 kW,最大输出功率约为30 kW. 采用液压泵/马达作为配重,系统驱动电机平均功率下降55 kW,液压平衡配重的节能效果显著. 当使用液压平衡配重时,上、下冲程中电机均做正功;在无配重条件下,当抽油杆处于下行程时,电机提供阻力矩,负载带动电机做负功,从而对电网或发电设备造成冲击.使用液压平衡配重可以减小系统装机功率,改善驱动电机运行条件,减少对电力系统的影响.无论是否采用平衡配重,在进行试油试采作业时电机均需频繁启停,功率变化较大,会对电机寿命造成一定的影响.
4 结 论
(1) 所设计的基于液压平衡的试油试采系统能够满足试油试采作业对冲程冲刺的要求,通过系统的闭环PID控制,可以使试油试采过程抽油杆位移较好地拟合预设梯形速度曲线,提升了作业效率.
(2) 利用液压平衡回路作为配重对负载削峰填谷,通过在下冲程时将主电机输出能量和抽油杆势能回收,并在上冲程时释放,可以将主驱动电机功率降低64.3%;电机运行工况得到有效的改善,减小了对电力系统的冲击.
(3) 本文的数学模型对开关磁阻电机和液压泵/马达输出力矩进行简化,未考虑两者输出力矩的脉动.开关磁阻电机输出力矩脉动频率约为500 Hz,脉动率约为25.46%[12];液压泵/马达输出力矩脉动频率约为175 Hz,脉动率约为2.53%[11].进一步的研究可以将电机和泵/马达的模型细化,得出电机和泵/马达的输出力矩变化对系统造成的影响.
[1] 魏新.移动式试油试采举升装置电液控制系统的设计研究[D].杭州:浙江大学,2008. WEI Xin. Design of electrohydraulic control system of traveling test-oil and test-tree lift equipment [D]. Hangzhou: Zhejiang University, 2008.
[2] 张彦廷,孙绪振,张恩强,等.液压抽油机关键参数分析及节能研究[J].机床与液压,2009, 37(10): 80-82. ZHANG Yan-ting, SUN Xu-zhen, ZHANG En-qiang, et al. Analysis on key parameters and the research oil energy saving for hydraulic pumping unit [J]. Machine Tool and Hydraulic, 2009, 37(10): 80-82.
[3] 方仁杰,朱维兵.抽油机历史现状与发展趋势分析[J].钻采工艺,2011, 34(2): 60-63. FANG Ren-jie, ZHU Wei-bing. Analysis on history and development trend of pumping unit [J]. Drilling and Production Technology, 2011, 34(2): 60-63.
[4] 黄永平,郭凯,金玉善.调压式抽油机节能控制器的研究[J].电子学报,2013, 41(4): 828-832. HUANG Yong-ping, GUO Kai, JIN Yu-shan. Research on voltage regulating energy saving controller of pumping unit [J]. Acta Electronica Sinica, 2013,41(4): 828-832.
[5] 范文明,宋锦春.新型节能液压抽油机驱动系统设计[J].机械设计与制造, 2014(7): 68-71. FAN Wen-ming, SONG Jin-chun. Design of a new energy-saving driving system for oil pumping unit [J].Machinery Design and Manufacture, 2014(7): 68-71.
[6] 周广清.低矮型长冲程节能抽油机的研制及应用[J].石油机械,2014, 42(3): 88-91. ZHOU Guang-qing. Development and application of low-size long-stroke pumping unit [J]. China Petroleum Machinery, 2014, 42(3): 88-91.
[7] MORIDIS G J, SILPNGARMLERT S, REAGAN M T, et al. Gas production from a cold, stratigraphically-bounded gas hydrate deposit at the Mount Elbert gas hydrate stratigraphic test well, Alaska North Slope: implications of uncertainties [J]. Marine and Petroleum Geology, 2011, 28(2): 517-534.
[8] LÜCKMANN A J, ALVES M V C, JR J R B. Analysis of oil pumping in a reciprocating compressor [J].Applied Thermal Engineering, 2009, 29(14): 3118-3123.
[9] LU Q F, FAN C Z, YE Y Y, et al. A high torque density permanent magnet motor for oil pumping unit [J]. Journal of Applied Physics, 2008, 103(7): 1-3.
[10] LEA J F. What’s new in artificial lift [J]. World Oil, 2003, 204(5): 31-36.
[11] 聂松林,李壮云,余祖耀.轴向柱塞式液压马达转矩特性的理论研究[J].液压与气动,2002(7): 7-10. NIE Song-lin, LI Zhuang-yun, YU Zu-yao. Study on torque characteristic of axial piston hydraulic motor [J]. Chinese Hydraulics and Pneumatics, 2002(7): 7-10.
[12] 张慧英,汪旭东,高彩霞.开关磁阻电机转矩脉动最小化研究[J].微电机,2009, 42(9): 15-17. ZHANG Hui-ying, WANG Xu-dong, GAO Cai-xia. Study of minimization of torque ripple in SRM drives [J]. Micromotors, 2009, 42(9): 15-17.
Modeling and simulation of well test and production test system based on hydraulic balance
ZHAO Peng-yu1, CHEN Ying-long1, SUN Jun2, ZHOU Hua1
(1.StateKeyLaboratoryofFluidPowerTransmissionandControl,ZhejiangUniversity,Hangzhou310027,China;2.LiaoheOilfieldCompanyDrillingandProductionProcessResearchInstitute,Panjin124000,China)
A movable well test and production test system was proposed according to the characteristics and requirements of well test and production test. The system used switched reluctance motor as main drive motor, hydraulic pump / motor and accumulator as counterweight. The counterweight stored potential energy of the sucker rod and output energy of the main drive motor during the down stroke, and released them out during the upstroke to lift the sucker rod together with the main drive motor. Using lumped mass method, the simplified system can be regarded as a model which contains three mass and two couplings. The dynamic model of the system was established. The dynamic characteristics, including the displacement and speed of the sucker rod, the pressure of the hydraulic system and the motor power, were obtained by Simulink simulation. The simulation results show that the stroke, jig frequency and other characteristics meet the requirements of well test and production test. The system can improve energy utilization rate, and reduce installed power by 64.3%. The main drive motor doesn’t provide resistance moment, and the operation conditions are improved, which reduces the impact on the power system. The system is with high integration and easy to transport.
well test and production test; hydraulic balance; dynamic model; Simulink simulation
2015-03-21. 浙江大学学报(工学版)网址: www.journals.zju.edu.cn/eng
浙江省重点科技创新团队自主设计资助项目(2013TD01).
赵鹏宇(1990—),男,博士生,从事流体传动与控制的研究. ORCID: 0000-0002-0514-2548. E-mail: zpy@zju.edu.cn 通信联系人:周华,男,教授,博导. ORCID: 0000-0001-8375-3291. E-mail: hzhou@sfp.zju.edu.cn
10.3785/j.issn.1008-973X.2016.04.008
TH 137
A
1008-973X(2016)04-0650-07
猜你喜欢
内江科技(2021年4期)2021-12-28
新疆钢铁(2021年1期)2021-10-14
油气·石油与天然气科学(2021年9期)2021-10-10
初中生学习指导·中考版(2021年9期)2021-09-27
焊管(2021年4期)2021-05-17
魅力中国(2020年9期)2020-12-07
化工设计通讯(2020年2期)2020-01-15
中国应急管理科学(2019年10期)2019-11-18
装备环境工程(2019年7期)2019-08-21
汽车之友(2017年2期)2017-04-14