
圆环面刀具数控加工刀具路径规划
2016-12-16 02:09:39李儒琼
上海师范大学学报·自然科学版 2016年5期
徐 颖,李儒琼
(上海师范大学 信息与机电工程学院,上海 200234)
圆环面刀具数控加工刀具路径规划
徐 颖,李儒琼
(上海师范大学 信息与机电工程学院,上海 200234)
研究了数控加工中圆环面刀具路径规划,建立圆环面刀具数学模型,从刀位点计算、曲面边界离散、相邻刀轨计算等方面确定刀具路径规划算法.最后,利用Matlab工具编程对路径规划算法进行了具体实现,通过计算基于圆环面刀具的刀位点数据,拟合生成刀具轨迹,同时利用UG软件采用球头刀对相同曲面进行加工路径仿真,通过两者比较,可以得出圆环面刀具加工效率更高的结论.
圆环面刀具;数控加工;刀具路径规划
0 引 言
随着科技的迅速发展,船舶、航空航天、汽车以及电子产品等行业对于产品外形的要求越来越复杂化、个性化,自由曲面在这些行业被广泛应用.自由曲面的复杂性,对加工过程要求很高[1].在数控加工中刀具加工轨迹的生成是其关键部分.
目前,数控加工使用的刀具主要有球头刀、平底刀、圆环刀、圆锥刀、鼓形刀和圆柱刀等[2].在众多刀具中,球头刀使用得比较多,因为球头刀对于复杂曲面有良好的适应性.现在,球头刀在五轴数控加工中已发展得比较成熟.球头刀加工过程中,接触点的法线始终过球心点,要得到刀位数据只要将刀触点沿其法线方向偏置一个球头刀的半径距离就可以了,因此计算球头刀的刀位数据也比较简单.当加工质量要求高时,球头刀就无法满足,并且其加工效率低.这就使得在数控加工中非球头刀的研究成为数控加工研究中的热点.因而,本文作者主要研究高效圆环面刀具数控加工路径规划.
刀具轨迹生成方法一般有等参数线法、等距截面法和等残留高度法等[3].等参数线法与等距截面法生成的刀具轨迹很难控制残留高度的均匀性,由于残留高度的不均匀,大大降低加工效率,影响最终加工精度[4].而等残留高度法通过控制相邻刀具轨迹之间距离,使刀具轨迹之间的残留高度不变,从而在已知一条加工刀具轨迹、刀具半径和允许残留高度的前提下,计算出下一条刀具轨迹,保证加工后的残留高度的均匀性,提高了加工效率和质量[5-6].本研究路径基于等残留高度法,并结合变步长法进行规划.
1 数学模型
圆环面刀具是指有效工作面为圆环面的刀具,比如圆环面铣刀、圆环面砂轮等[7].图1(a)为圆环面铣刀实例图,图1(b)为圆环面刀具工作简化模型图,从图1中可以看出,有效工作面为圆环面.

图1 圆环面刀具实物图与简化模型
圆环面刀具数学模型为
(1)
2 刀具路径规划算法
2.1 刀位点的计算
在刀具路径研究过程中,首先是通过步长和行距来计算出相应刀触点,再根据刀触点与刀位点的几何关系,把刀触点转换为刀位点,从而最终完成加工路径规划.
根据圆环面刀具的数学模型,圆环面的刀位点是指处于圆环部位的中心点.图2是三坐标加工时,圆环面刀具与加工曲面的啮合关系示意图,其中e点表示圆环面的刀位点,r为曲面上任一点的位矢.当刀具与曲面在该点相切触时,刀位点e的位矢re为:

(2)
其中,n为接触点单位法矢,nxy为其在XOY平面上的投影矢量.

图2 刀位点计算模型
对于任一刀触点为c(xc,yc,zc),圆环面铣刀加工时其相应的刀位点为

(3)
2.2 曲面边界离散算法
就如前面所述,刀具路径可以看成是离散刀位数据的集合体,而刀位数据里包含了刀位(CL)点.每个CL点对应于一个刀具接触(CC)点,相邻两个CC点的距离即为所要求的步长l.因此,需要做的工作是要把CC路径Pi离散化.当然这种离散不是随意的分割,而应该根据加工精度来离散.对当前第i条CC路径Pi=S(u(t),v(t))上的第j个CC点Ci,j(对应的参数t=tj),计算出第j+1个CC点Ci,j+1的参数值tj+1.
曲线Pi在点Ci,j处的曲率为

对应参数值为

(4)
2.3 相邻刀轨的计算
假设已知刀触点轨迹为Pi,其已知刀触点为Ci,j,与Pi相邻的另一刀触点轨迹为Pi+1,其上与Ci,j对应点为Ci+1,j,其中Ci+1,j是指曲面上过Ci,j且垂直于Pi的短程线上与Ci,j相距一个行距H的点,因此Ci+1,j满足以下两个条件

(5)

(6)
将Ci+1,j用Taylor级数展开并略去二阶以上的各项,可得:
Ci+1,j=Ci,j+Ci,juΔu+Ci,jvΔv.
(7)
将式(7)分别代入式(5)、(6)并化简得:

E(Δu)2+2FΔuΔv+G(Δv)2=L2.
联立上述两式解得:

(8)
(9)
其中Δu、Δv的正负号由走刀方向确定.如果选择u参数方向为刀具轨迹方向,则Δu可以忽略以简化计算,而只考虑Δv来维护残留高度不变.反之,如果选择v参数方向为刀具轨迹方向,那么Δv可以忽略来简化计算,残留高度不变则由Δu来满足.
所有对应的刀触点Ci+1,j构成了相邻的刀轨Pi+1,其表示为
Pi+1=S(u(t)+Δu(t),v(t)+Δv(t)).
(10)
2.4 刀具路径生成
刀具路径规划过程是一个循环的过程,主要由同条轨迹刀位点数据的计算和相邻轨迹刀位点数据的计算两部分组成.本研究的刀具路径规划算法具体步骤为:
第一步选取初始路径:选择一条最长的曲面边界作为第一条刀触点轨迹.
第二步初始路径离散化:根据上节方法得出一系列满足精度要求的刀触点.
第三步计算对应刀触点:根据行距公式计算对应刀触点.
第四步相邻路径生成:连接各对应刀触点并进行拟合,将拟合后的曲线进行延伸或裁剪,使其端点在曲面的边界线上,即得到相邻刀触点轨迹.
第五步重复二、三、四步,直到覆盖整个加工域为止.
第六步根据式(3)将刀触点转换为刀位点,并按照一定顺序连接,即生成刀具路径.
3 结 论
为了进一步验证本算法的正确性,选取一个自由曲面作为计算特例,其参数方程为:

(11)
现选取R1=10 mm,R2=30 mm,的圆环面刀具,加工精度为0.03 mm,以曲面的一条边界线(0,v)作为初始刀具路径,利用Matlab生成的圆环面刀具路径如图3所示.部分刀位数据如表1所示,et为环心位置,nt为刀轴矢量.

图3 圆环面刀具加工路径
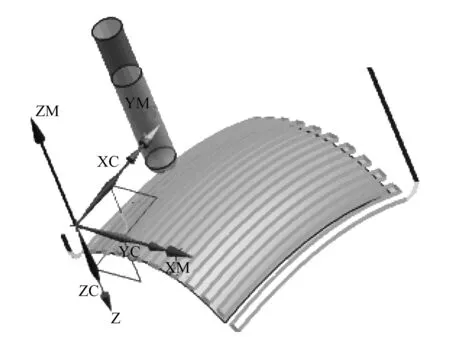
图4 球头刀加工路径

表1 部分刀位数据
图3是利用Matlab生成了基于圆环面刀具的加工路径,图4是利用UG生成了基于球头刀的加工路径.综合分析,两种刀具加工同一曲面产生的路径数不同,球头刀的加工路径数为18条,圆环面的刀具路径数为10条.表2给出了两种刀具轨迹长度比较,可以看出用圆环面刀具加工路径效率更高.

表2 加工结果比较
[1] Li D X,Jiao J P.Research on tool path generation algorithm and improvement based on Hilbert space-filling curves [J].China Mechanical Engineering,2011,22:2739-2743.
[2] Zhao S T.Research on tool path planning algorithm for free-form surface machining [D].Nanjing:Nanjing University of Aeronautics and Astronautics,2011.
[3] Chen Y Q,Zheng Z T.Optimization on tool-path planning based for free-form surface on MasterCAM [J].Modern Manufacturing Engineering,2014:46-51.
[4] Li L,Fang L J,Wang G X.Research on tool path planning for the NURBS surface five axis machining [J].Machinery,2014:5-9.
[5] Cao Z M.Research on programming technology of surface machining based on constant scallop height [J].Modular Machine Tool & Automatic Manufacturing Technique,2014:126-129.
[6] Wei Y B,Liao B,Li Y.Tool-path plan for the free-form surfaces machining based on ISO-scallop [J].New Technology & New Process,2013,12:63-65.
[7] Li R Q.Research on freeform surface modeling and NC machining for high-efficiency [D].Shanghai:Shanghai Jiao Tong University,2004.
(责任编辑:包震宇,郁 慧)
Tool path in torus tool CNC machining
XU Ying, LI Ruqiong
(College of Information,Mechanical and Electrical Engineering, Shanghai Normal University, Shanghai 200234, China)
This paper is about tool path in torus tool CNC machining.The mathematical model of torus tool is established.The tool path planning algorithm is determined through calculation of the cutter location,boundary discretization,calculation of adjacent tool path and so on,according to the conversion formula,the cutter contact point will be converted to the cutter location point and then these points fit a toolpath.Lastly,the path planning algorithm is implemented by using Matlab programming.The cutter location points for torus tool are calculated by Matlab,and then fit these points to a toolpath.While using UG software,another tool path of free surface is simulated of the same data.It is drew compared the two tool paths that using torus tool is more efficient.
torus tool; CNC machining; tool path planning
2015-05-06
李儒琼,中国上海市徐汇区桂林路100号,上海师范大学信息与机电工程学院,邮编:200234,E-mail:rqli@shnu.edu.cn
TG 659
A
1000-5137(2016)05-0555-05
10.3969/J.ISSN.1000-5137.2016.05.007
猜你喜欢
机械研究与应用(2023年6期)2024-01-12 06:07:10
武汉广播影视(2022年6期)2022-12-28 06:38:12
军民两用技术与产品(2020年8期)2020-09-07 13:37:18
计量学报(2020年7期)2020-08-07 02:55:36
制造技术与机床(2019年6期)2019-06-25 10:18:00
汽车实用技术(2019年7期)2019-04-18 07:55:52
现代工业经济和信息化(2016年4期)2016-05-17 05:35:40
电气化铁道(2016年2期)2016-05-17 03:42:34
哈尔滨师范大学自然科学学报(2014年5期)2014-10-24 10:17:58
电工技术学报(2011年1期)2011-02-19 12:21:58
