基于ANSYS刮板静应力及优化分析
2016-12-15 09:44刘祖国张大斌余朝静
湖北工程学院学报 2016年6期
刘祖国,张大斌,雷 焱,余朝静,卢 泽
(贵州大学 机械工程学院,贵州 贵阳 550025)
基于ANSYS刮板静应力及优化分析
刘祖国,张大斌*,雷 焱,余朝静,卢 泽
(贵州大学 机械工程学院,贵州 贵阳 550025)
为了有效提高地膜回收效率,研究了膜土分离装置的刮板结构。首先利用SOLIDWORKS建立了刮板的三维模型,然后通过ANSYS Workbench软件对刮板进行了静态分析,利用Design Explorer模块在静应力分析的基础上对膜土分离装置的刮板进行优化设计。通过对刮板模型施加相应的载荷,分析刮板总变形量并得到优化后的刮板参数化模型。分析结果表明,固定面的长度是27.5时,固定面连接的面的长度是2.3时刮板的变形量及应力最小。
刮板;ANSYS;优化设计;静态模型
刮板是回收地膜作业过程中的关键部件,主要是将附在膜上面的土壤分离,避免将膜连土壤一起拾起,这增加了收膜的难度。近年来许多学者研究了地膜的回收问题,如罗东升等[1]发明了1ZSM II型地膜回收机;蒋建荣[2]研发了QMB 1500型后置式起膜拔棉秆机;张惠友等[3]研制了收膜整地多功能作业机,这些机型都是处理作物收获后地膜被土壤覆盖难以回收的问题。目前,为了防止地膜被风掀离垄面,在覆膜时会在地膜边缘覆上一层覆膜土,这层覆膜土随着覆盖时间的推移,在雨水和人为作用下,土壤与地膜板结在一起,将严重阻碍地膜的回收,这也是导致苗期地膜无法完整回收的主要原因。因此地膜回收机需要设置膜土分离装置,在收膜装置作业前将边膜上的压膜土与地膜分离,以便卷膜辊能顺利且较为完整地回收地膜。
针对土壤覆盖地膜难以回收的问题,本文提出了一种膜土分离装置—刮板,既能将地上的覆膜土疏松,又能将块状覆膜土从地膜上刮离;并利用有限元分析了刮板在收膜过程中的应力变形情况,基于优化设计理论,对刮板六西格玛优化设计分析[4-7]。
1 刮板的工作原理分析
刮板的简化结构如图1所示,其中刮板入土角为α=23°,厚度为2 mm。刮板作为揭膜机高效回收的重要部件,它主要是通过与固定面连接的斜板把板结在地膜上的土块刮开,再进行揭地膜,有效的提高地膜的回收效率。

图1 刮板结构简图
1.1 刮板结构受力分析
刮板在进行刮土时所受的土壤阻力是地膜回收机所受外力的重要组成部分,其受力部位理论上主要由AB斜面和竖直平面BC承担(见图2)。
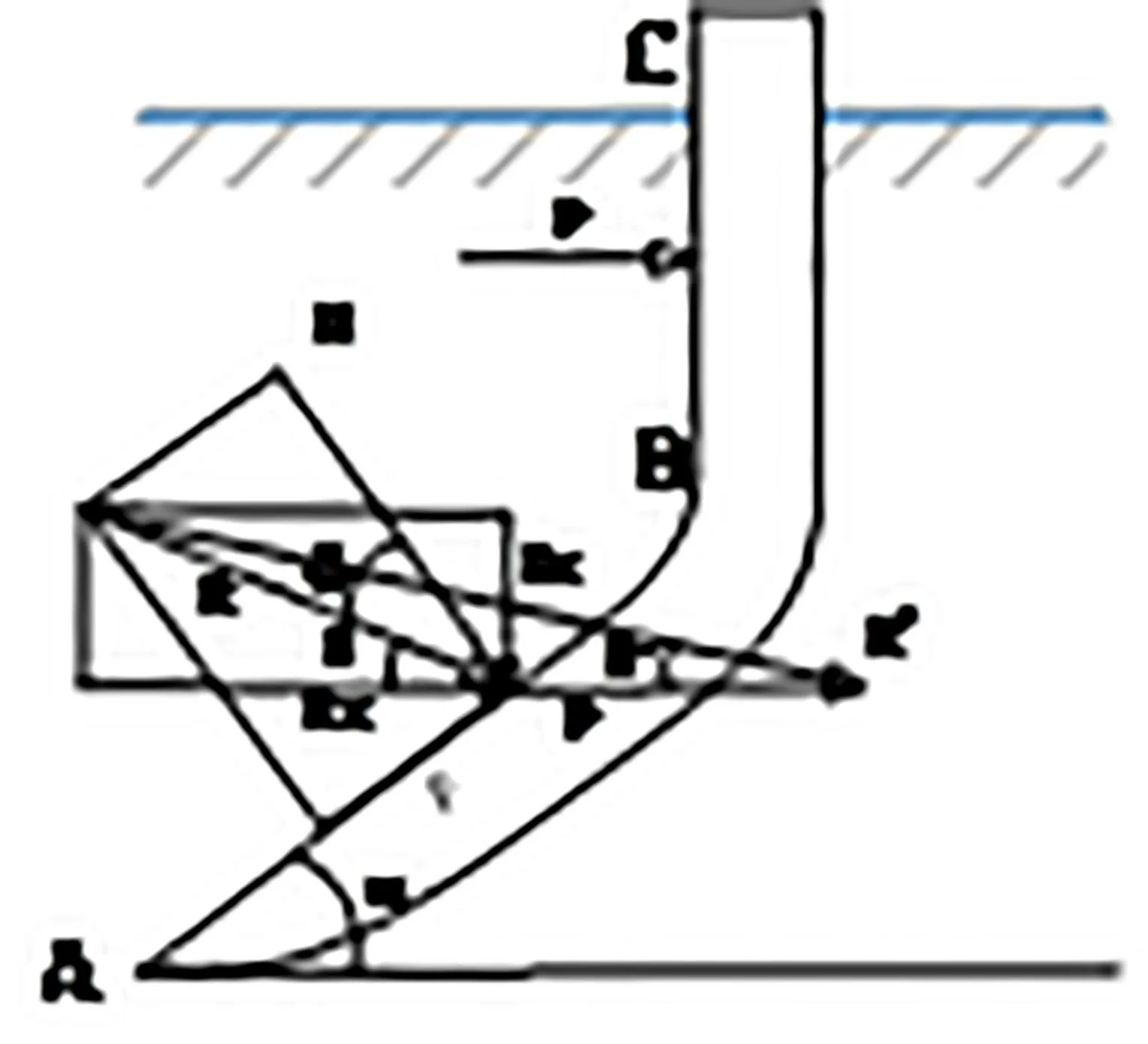
图2 工作时的刮板结构受力情况
工作时,随着机具的前进,土壤对AB面的作用力N垂直于面AB,由理论力学可知,N所作用力的点可视为AB段的中点。在膜土分离作业过程中,除了阻力N外,还有一个沿AB面的摩擦力F,可将F与N合力,记为R。将合力R可以分解为力Rx和Rz,其中Rz主要是把土壤和地膜分离的有效阻力;Rx则表示将土翻起的力。
在膜土分离时,主要受力面为AB面,以及刮板另一部分BC段受到力P作用,由于机具是向前水平推动刮板,所以在水平方向受到一个垂直BC段的力P。同时在水平方向上有两个阻力,分别是P和Rx的水平阻力,由力的合成得到了总阻力R'。阻力R与水平面所成的夹角为β,同时产生一个附加力偶,这个力偶由机架的支承力来平衡。
刮板工作时,抬起覆膜土并使之松动的作用力大小为Rz。由力的分解可知地膜回收机在进行回收地膜工作时主要受到来自刮板的阻力为:
Px=Rzcot β'
(1)
由式(1)可知,当Rz一定时,β'角越大,刮板的阻力越小,当β'=β时,得到最大的合力作用角,且有关系式:
α+β+φ=90°
(2)
式中:α为起土角,β为合力作用角;φ为摩擦角。
由式(2)可知,因为摩擦角是由土壤参数与金属表面确定的参数,所以当α角减小时β角将增大,这将有利于工作阻力的减小,但α过小时,会降低刮板尖端的强度,为得到一定的抬土高度,减小α时,同时增加刮板尖端的水平长度,因此也会导致刮板铲尖尺寸变大。综合膜土分离效果因素,现将α角定为23°。由于土壤是由石粒和一些其他的颗粒状的物质组成,使用在土壤与刮板间摩擦系数较大,摩擦系数应取在0.4~0.8之间。
1.2 刮板作业时牵引阻力计算
由于刮板工作情况复杂,因此在计算刮板工作时受力的理论值时,常采用经验公式[8]进行计算。依据经验公式建立刮板受力模型如图2所示,图2中AB为刮板。
由图2可知,工作时刮板产生的牵引阻力主要由三部分组成:刮板与沟底、沟壁的摩擦力;刮板切割土壤并使其变形的有效阻力;将土壤从刮板一侧抛出时受到的土壤对刮板侧面的摩擦阻力在机器前进方向上的分力。其表达式为:
(3)
故可得:
F刮=μG+khbsin γ(1+usin γ)
(4)
式中:本文取摩擦系数μ=0.8;γ—刮板偏向角即刮板与地膜回收机前进方向夹角,此处选择60°;G—机架施加给刮板的下压力,此处由经验取为100 N;k—土壤的阻力系数,在此取为10 N/cm2;h—刮板刮土时的深度,此处为2 cm;b—刮板的宽度AB段,此处为10 cm。
简化了刮板阻力计算模型后,经过计算得单块刮板所受阻力值F刮约为550 N,该结果可为有限元分析优化提供理论参考。
2 刮板的有限元模型
2.1 结构静应力理论分析
结构静应力在有限元中主要是指结构在受到静态的载荷时,加载在结构上的惯性和阻尼可以忽略。在此情况下达到结构的静态平衡,又有惯性主要的决定因素是质量,使用如果忽略了惯性的作用,则结构的质量的影响就可以忽略。在WORKBENCH平台中通过设置静应力就可以得到结构的静态响应。
通过有限元经典力学理论可知,忽略惯性和阻尼的静力学方程为:
[M]{x′′}+[C]{x′}+[K]{x}={F(t)}
(5)
通过分析忽略质量[M]和阻尼矩阵[C],则上式可以转化为:
[K]{x}={F(t)}
(6)
由于在线性结构分析中,与时间t相关的参数都将被忽略,所以上式简化为
[K]{x}={F}
(7)
式中:[K]是刚度矩阵;{x}是位移变化矢量;{F}是力的矢量。
2.2 刮板有限元静态分析
通过对刮板的有限元静态分析[9-10],首先建立了有限元刮板网格模型,如图3所示。
由于在进行静应力分析时,判断静应力准确性的好坏主要依靠刮板的网格质量,当网格质量靠近1时,分析出来的应力变形效果云图的准确信最好。本文为了提高网格的质量和分析的快慢,采用的是三面体网格,其中网格节点为15144,网格单元为8011,网格质量见图4。
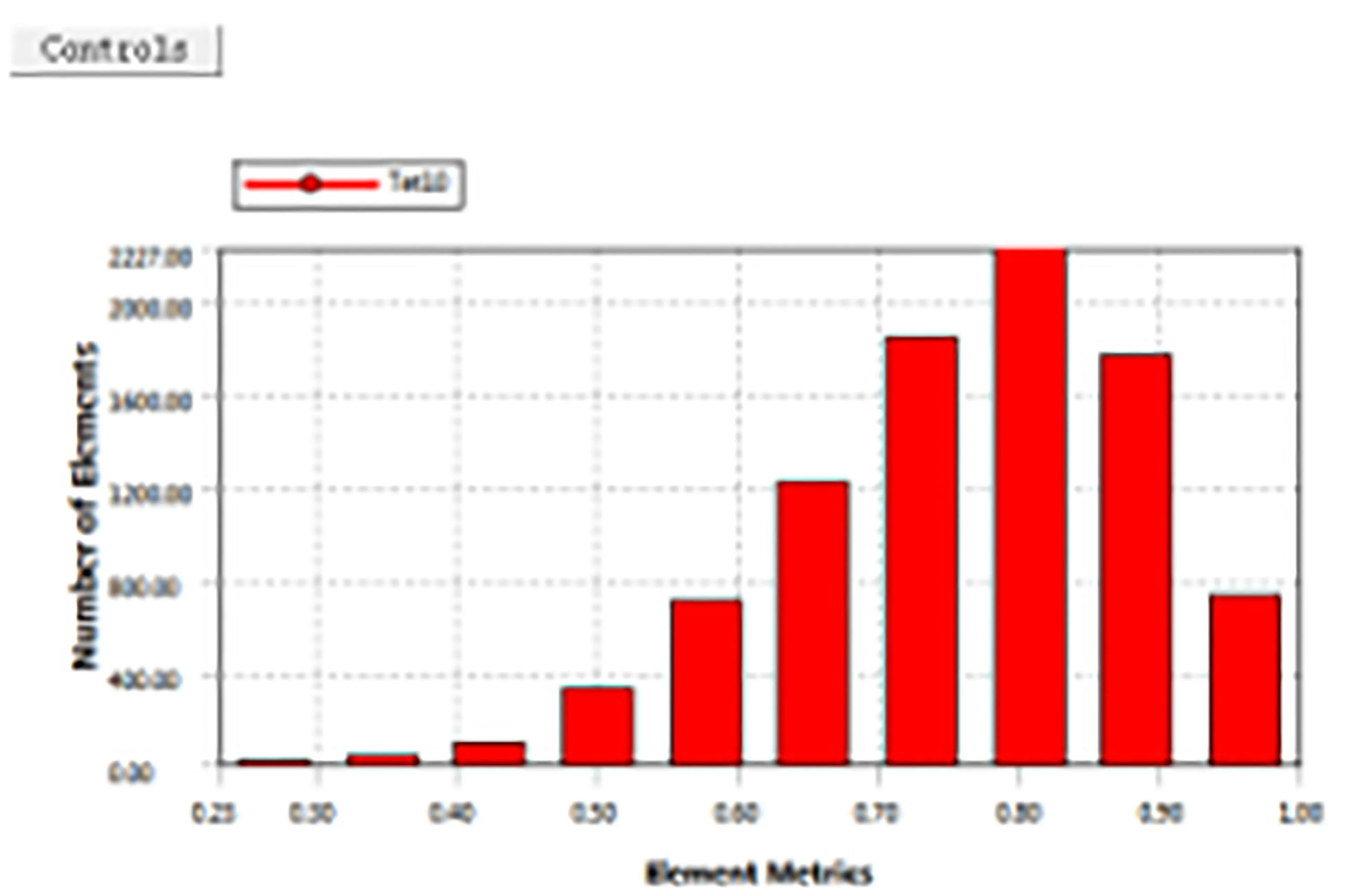
图4 刮板网格质量
从图4可以看到,网格质量趋近于1,所以网格质量良好。
其次就是通过设置约束条件,因为在刮板进行把地膜表面的土壤刮掉的过程中主要是约束了固定在刮板上的两个螺纹孔,通过机具向前的推进,刮板的弧形斜面就接触到土壤,计算对刮板作业时牵引阻力我们可以知道刮板所受阻力值F刮=550 N,α=23°,再对其进行静应力分析。
通过图5中设置了A为固定约束,B为载荷约束,通过公式P=S/F,得到施加载荷为0.055 MPa。在ANSYS中设置好约束条处理后,得到如图6所示的总变形云图及应力变化云图。
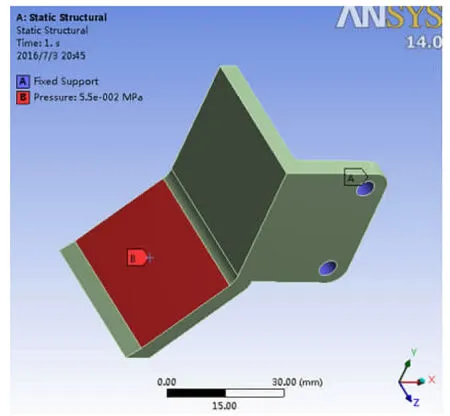
图5 刮板的约束及加载
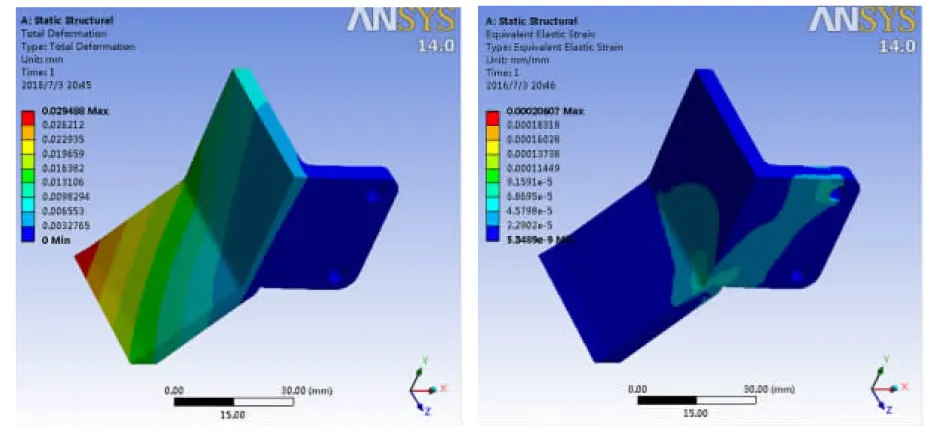
图6 总变形及弹性力变化云图
通过云图分析,我们可以看到:
(1)在施加载荷后,发生变形量最大的部分是在刮板的斜面与土壤接触的地方,且最大变形量为0.026 mm,由于我们是对刮膜板静态时的仿真,所以变形量很小,如果长期的进行刮土作业,载荷会随着土壤结构的复杂多变而产生冲击,在连续的冲击下就会使变形加大,使得刮膜板失去原有的功效,刮膜板的斜面板将沿x轴的正方向扭转变形,所以我们可以通过向斜面板焊接一根支撑条来分散一部分载荷。
(2)由图6中的云图可以看出,刮膜板的等效弹性应力最大集中位置为斜面刮板与固定面连接处,这主要是由于固定面是固定在机架上的而刮板是接触土壤的,所以等效弹性应力大部分由连接面承担而与机架固定的面的应力的一部分由机架承担了。如果长时间地工作,应力集中在连续处的这个部位将会使刮板从接触的地方断裂,缩短使用寿命。一般可以通过加厚连接部位的厚度,采取密封焊接技术来加强连接处的强度。
3 刮板的优化设计
在有限元软件中,可以通过参数化建模来分析各个参数的优化过程,本文的优化设计主要设置了刮膜板的长度参数,分别是固定面的长度与固定面连接的面的长度,选定设计优化参数后,采用六西格玛优化设计的方法,刮膜板优化设计模型。
通过优化设计模型导出优化设计数据见表1。
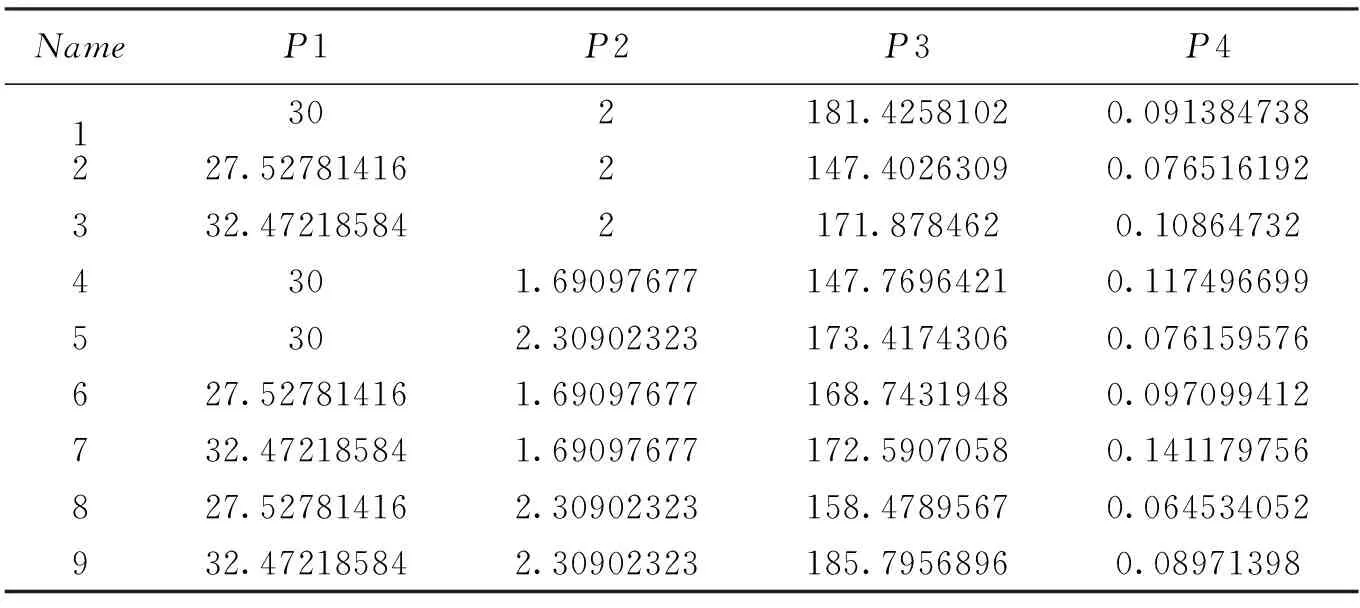
表1 优化设计参数
由表1的分析数据可以看出,当P1是27.5,P2是2.3时,对应的总变形量及有效弹性力的平均值最小,能够减少刮膜板的变形。通过Six Sigma Analysis可以得到相关数据的敏感性结果,如图7所示。
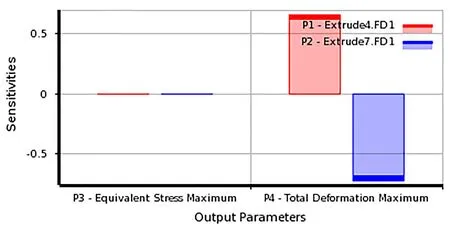
图7 P1、P2、P3、P4灵敏度关系图
从图7中可以分析得到对于等效弹性力长度P1、P2与P3是成正比的,而对于P4、P1是与P4成正比而P2与P4是成反比,经过六西格玛优化设计分析后得到最优的点是P1为27.5,P2是2.3。
4 结论
(1)通过对刮板进行力学模型分析可计算出当刮板在进行刮土作业时所受力的大小和土对刮板的阻力的大小,为优化设计提供了约束条件。
(2)利用ANSYS优化设计理论,建立了刮膜板优化设计模型,可计算出变形量与有效弹性力最小时的最优长度参数。
(3)利用六西格玛优化设计模块,缩短了优化设计时间,有效地加快了人为优化设计进程,并得到了可靠的优化设计方案。
[1] 罗东升,张东兴,娄秀华.地膜回收机拢膜机构的设计[J].中国农业大学学报,2001,6(4):39-41.
[2] 蒋建荣.QMB 1500型后置式起膜拔棉秆机[J].新疆农机化,2007(2):12-12.
[3] 张惠友,侯书林,那明君,等.收膜整地多功能作业机的研究[J].农业工程学报,2007,23(8):130-134.
[4] 冯楚胜.六西格玛理论与实施[J].舰船科学技术,2007,29(3):140-142.
[5] 夏萍,印松,陈黎卿,等.收获机械往复式切割器切割图的数值模拟与仿真[J].农业机械学报,2007,38(3):65-68.
[6] 姚道仕,杨建国,吕志军.基于ANSYS Workbench的货架立柱截面优化设计[J].东华大学学报(自然科学版),2011,37(4):438-441.
[7] 凌桂龙,丁金滨,温正.ANSYS Workbench13.0从入门到精通[M].北京:清华大学出版社,2012.
[8] 杨义勇.机械系统动力学 [M].北京:清华大学出版社,1997.
[9] 冯楚胜.六西格玛理论与实施[J].舰船科学技术.2007(3):140-142.
[10] Jia H, Ma C, Li G, et al. Combined rototilling stubble-breaking plantingmachine[J].Soil and Tillage Research, 2007,96:73-82.
(责任编辑:熊文涛)
2016-09-05
贵州大学研究生创新基地项目(CXJD[2015]003);广西中烟工业有限责任公司科技项目(1212014015)
刘祖国(1992- ),男,贵州铜仁人,贵州大学机械工程学院硕士研究生。
张大斌(1976- ),男,贵州贵阳人,贵州大学机械工程学院副教授,本文通信作者。
S22
A
2095-4824(2016)06-0106-04
猜你喜欢
中学生数理化·七年级数学人教版(2022年10期)2022-11-11
机械管理开发(2022年1期)2022-03-24
昆明医科大学学报(2021年12期)2021-12-30
建材发展导向(2021年6期)2021-06-09
矿山机械(2021年3期)2021-03-25
英语文摘(2020年10期)2020-11-26
机械工程与自动化(2020年5期)2020-11-05
数学年刊A辑(中文版)(2019年3期)2019-10-08
中学生数理化·八年级物理人教版(2018年3期)2018-05-31
北京航空航天大学学报(2017年6期)2017-11-23