导弹动态抗干扰测试系统关键技术研究
2016-12-15 07:27程明阳
系统仿真技术 2016年3期
程明阳
(凯迈测控有限公司,河南 洛阳 471009)
导弹动态抗干扰测试系统关键技术研究
程明阳
(凯迈测控有限公司,河南 洛阳 471009)
首先简单介绍了导弹动态抗干扰测试系统的主要系统组成与闭环仿真测试原理。从实时仿真平台架构的搭建、时钟同步系统设计和系统各控制节点信息的有效传递方式三个方面对系统仿真的实时性进行设计。提出了实现目标模拟器模拟俯仰和偏航两个方向的弹目视线高速角运动的解决措施,给出复合光路的数学模型,并通过试验分析确认复合光路的角度达位精度可满足仿真测试要求。最后通过与同条件下空中靶试试验的试验结果对比验证了导弹动态抗干扰测试系统的测试结果的可信度和测试方法的有效性。
导弹动态抗干扰测试; 半实物仿真; 实时性; 高速视线运动模拟
1 引 言
随着导弹制导系统越来越先进,作战环境日益复杂,已很难获得一种能有效地详细描述制导系统性能的数学模型用于数字仿真和动态测试。若其动态性能的衡量完全通过外场飞行试验来评定的话,几乎不可能实现,而且某些边界条件下的测试也不能通过外场试验来考核。
基于半实物仿真的导弹动态抗干扰测试系统可在实验室内方便的对某型红外制导空空导弹在各种典型弹道下的动态制导性能进行定量测试、动态抗干扰性能进行测试和制导控制系统的动态性能进行测试。
2 系统组成
导弹动态抗干扰测试系统主要由目标模拟器、横滚转台、惯测模拟器、仿真总控台、舵机加载台和仿真计算机及仿真模型组成。测试系统以多台计算机构成分布式控制节点,通过基于VMIC5565光纤反射内存网络实现各控制节点的连结,实现高速实时数据指令交互,在软件系统的控制下完成对导弹动态抗干扰性能的测试[1]。系统功能框图如图1所示。
仿真总控台主要负责整个测试系统的自动化管理、仿真测试实时运行控制、测试信息的实时显示等。它可以实现测试过程中被测产品(制导控制舱、舵机)供电供气控制,导弹工作所需的飞行任务下发,与产品进行信息交换,仿真运行控制以及导弹输出的各种模拟量和数字量信息进行采集存储处理后以用于对导弹制导性能的分析等功能。
目标模拟器可为测试系统提供一个满足测试要求的红外模拟目标源以及二个干扰源。仿真测试时可模拟弹目视线角的变化及干扰一诱饵从中心沿偏航方向分离、干扰二诱饵从中心沿俯仰方向分离的投放。

图1 系统功能框图Fig.1 Function block diagram of system
为了解决各种半实物仿真系统中的位置转台只能模拟导弹绕质心的转动,而无法模拟惯测装置中加速度计探测到的导弹线加速度信息的难题。系统研制了专用的惯测模拟器来实时模拟产生弹体的线加速度等信息。仿真测试时由仿真计算机将实时解算出的导弹线加速度信息传递给惯测模拟器,由惯测模拟器将数字信号转换为脉冲信号,注入导弹惯测接口,实现系统闭合[2]。
舵机加载台用来模拟导弹飞行过程中作用在舵面上的气动铰链力矩和推力矢量力矩。测试时舵机舵轴的偏转使加载台的扭簧杆产生抵抗扭矩,从而实现舵机的被动加载。同时,加载台上的角度传感器和扭矩传感器将相应的角度和力矩信号通过AD卡和脉冲计数卡采集到计算机,由计算机完成信息的处理和存储[3]。
横滚转台主要功能是接受仿真计算机发送的横滚通道的控制信息,复现导弹的空间横滚姿态运动。
仿真计算机及仿真模型作为半实物仿真系统的核心,主要承担导弹动力学和运动学方程、目标运动方程及弹目相对运动方程的实时解算、设备驱动等功能。
3 闭环仿真测试原理
仿真测试开始前先进行系统初始化工作,然后启动各仿真设备,将目标模拟器、横滚转台置于仿真初始条件要求的位置,并将仿真初始参数传递给仿真计算机中模型解算程序;仿真总控台完成导弹安全检查、供电、供气,确认测试系统和导弹状态正常后,发送初始飞行指令,控制电气分离,发射导弹,同时发出仿真开始指令。
舵机加载台实时采集导弹输出的舵偏角信号,经仿真计算机中导弹运动学、动力学和目标运动模型解算后,反算出导弹的各状态参数。将实时解算出的法向加速度和侧向加速度数据通过惯测模拟器注入给相应的法向加速度计和侧向加速度计测量电路,控制横滚转台运动以模拟导弹在空中的实际运动。同时解算出目标的当前位置,控制目标/干扰模拟器完成导弹-目标相对视线运动的模拟。仿真总控台在适当时刻下达投放干扰指令,控制目标模拟器实现干扰的正确投放。导弹制导系统根据目标视线偏角,依据相应导引规律生成控制信号,输出给导弹姿态控制系统,由弹上计算机根据各传感器的信号计算出控制信号,控制舵机偏转,实现导弹运动的稳定和跟踪目标,从而形成闭环仿真回路[4]。
4 关键技术分析及解决措施
4.1 仿真实时性设计
导弹动态抗干扰测试系统是将被测产品接入实时仿真回路构成的半实物仿真系统,时间约束强,是高精度的硬实时系统,因此对仿真系统的实时性进行分析设计是系统设计的关键点[5]。
4.1.1 实时仿真平台架构
仿真计算机系统结构分为三部分。其中第一部分是仿真建模集成环境;第二部分是Windows进程;第三部分是Windwos平台上的实时扩展子系统RTX[6]。仿真建模集成环境已集成仿真模型解算涉及到的一些线性计算、积分算法、快速函数插值等算法,可很好的解决算法优化和准确性问题,使得计算机解算和算法可满足实时性要求;Windows进程处理非实时计算任务,如:人机交互环境、曲线显示与分析、数据存储等;实时进程处理实时计算任务,如模型计算和实时网络通信等。RTX与Windows共存于一台机器中,而不需要传统的上下位机的方式。RTX运行于系统内核层,实时子系统RTSS的线程优先于所有Windows线程,提供了对IRQ、I/O、内存的精确直接控制,以确保实时任务的100%可靠性[5]。通过高速的IPC通讯和同步机制,RTX方便地实现与Windows之间的进行高速实时的数据交换。实时仿真平台架构如图2所示[5]。

图2 实时仿真平台架构Fig.2 Real time simulation platform architecture
4.1.2 时钟同步系统设计
由于仿真测试系统中多个处理机上进行并行仿真计算,为了保证整个系统的同步,必须设定以某台设备的时钟为基准,采取措施使系统所有其他计算机时钟与它保持一致。本测试系统利用研华公司生产的PCI-1780U定时/计数器卡搭建了一套时钟同步系统。
在仿真测试开始时,仿真总控台启动时钟脉冲输出,以此作为零时刻,各个节点计算机内也安装同样的PCI-1780U计数卡接收时钟脉冲,在任意时刻均可通过读取通道计数信息,获取相对与零时刻的毫秒时刻及微秒时刻,每个节点写入反射内存网络的数据,均按从定时计数器卡读取的时统信息打上时标,时标采用相对时标。
4.1.3 仿真实时性实现
基于RTX实时操作系统扩展和高精度定时时钟使仿真计算机完全能够实现精确定时和仿真计算周期迭代,除此之外,仿真计算机还需要通过反射内存网络将定时周期信息传递给测试系统中的其它控制节点,实现方式是通过反射内存网络提供的中断消息实现各节点之间的周期定时和同步。
VMIC5565反射网提供了四个中断通知消息,源节点可通过发送这些消息触发其它节点的中断,每个中断通知消息还可以附带一个32位的参数,通过消息号和参数的组合,可以构建种类丰富的实时应用。设计中仿真计算机利用其中RFM2GEVENT_INTR2通知消息向其它节点发送定时通知(RFM2GEVENT_INTR1通知消息用于主控计算机发送测试动作通告)。接收节点在Windows系统下响应该通知会有一定延迟,为掌握该延迟数值,在两台配置Core2Duo 2.66GHz CPU的工控机上采用反射内网进行了实际测试,测试原理如图3所示[7]。

图3 RTX在多处理器上的运行方式Fig.3 Operation mode of RTX on multi processor
工控机对起始时刻和终止时刻的查询采用多媒体定时器的性能计数器,可以获得微秒级的计算精度,测试的结果表明时间差在120μs左右波动,最大不超过150μs,这一结果也证明了Windows不是一个强实时性的操作系统,但总体速度并不慢。终止时刻与起始时刻的差值包括了两台计算机对反射内网网的访问时间,反射内存网数据传输时间和计算机响应通知消息的延迟时间,因此单次通知消息的响应时间小于测试值的一半。本系统所选用的计算机CPU配置比测试用计算机更加强大,可以保证各个节点的定时消息响应延迟不大于75μs。
对于控制延迟时间,首先系统所选反射内网网络的硬件性能可以保证极短的传输延迟[5],关键在于缩短Windows操作系统下对反射网卡的访问时间,本设计采取以下措施:
(1) 采用高性能工控机平台,为系统搭建高速处理平台;
(2) 反射内存网卡采用PCIe总线,避免PCI总线访问可能出现的访问冲突;
(3) 合理安排各个控制节点的负担,避免计算机因为负载过重导致响应速度减缓;
(4) 软件开发中采用多线程开发技术,充分发挥多核CPU的强大处理能力,合理调度进程和线程优先级,确保实时要求高的任务获得充分CPU资源[8];
(5) 内存管理中,实现了内存页面锁定功能,可将仿真处理所需的数据页面锁定在物理内存中,避免页面交换造成的延迟[6]。
4.2 弹目高速视线运动模拟实现
仿真测试时目标模拟器需模拟俯仰和偏航两个方向的弹目视线高速角运动。若采取传统的目标模拟器整体转动,则转动惯量很大,转台的功率、尺寸、价格和研制风险相应增大很多。为降低目标转台的研制风险,系统采用了使目标模拟器固定不动,采用旋转摆镜实现俯仰方向的高速运动要求,通过控制上摆镜转台和下摆镜三轴复合运动实现偏航方向高速运动要求。俯仰方向的视线运动只需保证上下摆镜的同步控制即可,本文重点阐述偏航方向的高速视线运动解决方案。
4.2.1 光学系统设计
光学系统总体结构示意如图4所示。其中上摆镜是反射镜,以模拟器为基准,安装在二维伺服运动框架上,其回转中心和目标方位转台、导弹位标器旋转中心处于同一旋转轴上,且垂直于导弹轴线,具有二维摆动功能。下摆镜是反射镜,安装在俯仰伺服运动框架上,随其一同安装在方位转台上。
在模拟偏航运动过程中,通过上下摆镜的三轴复合运动(上摆镜回转、俯仰,下摆镜回转),使光路在上摆镜出射以后始终入射到下摆镜的俯仰轴上面,即出射光始终是以下摆镜的俯仰轴为中心,然后控制下摆镜转台做偏航运动,即可实现光路的偏航姿态运动。其三轴复合运动是以下摆镜转台偏航角度为驱动定值x,通过光路合成,建立上摆镜的俯仰函数f(x)和回转函数y(x),通过输入偏航角度x,即可驱动上摆镜的姿态运动,进而使偏航光路得以实现。其数学模型为

图4 光学系统结构示意图Fig.4 Schematic diagram of optical system structure
(1)
(2)
4.2.2 精度测试
复合光路的角度达位精度对整个仿真试验方案拟订和结果评估都是关键因素。项目组利用可见光和自准直仪对偏航复合光路的角度在任意0°到100°范围内的达位精度进行了测试,最终误差目标光路与理论光路夹角误差曲线如图5所示[9]。
由图5得,误差最大角为0.914′(即:0.0152°),可满足仿真测试要求±1′角度达位精度的要求。
5 结 论
导弹动态抗干扰测试系统已经在某型红外
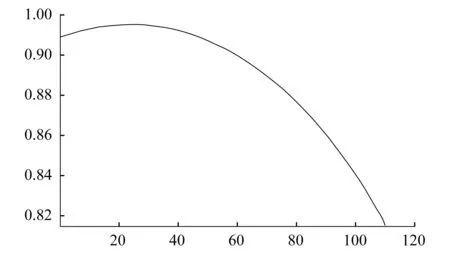
图5 误差仿真分析图Fig.5 Error simulation analysis diagram
制导空空导弹研制中得到应用。该测试系统为红外成像制导空空导弹提供了一个比较真实的仿真环境。通过与同条件下空中靶试试验的靶试结果进行对比,对比结果见图6。结果可见,空中靶试试验与半实物仿真测试结果差别不大,验证了动态抗干扰测试系统的可信度和仿真方法的有效性。
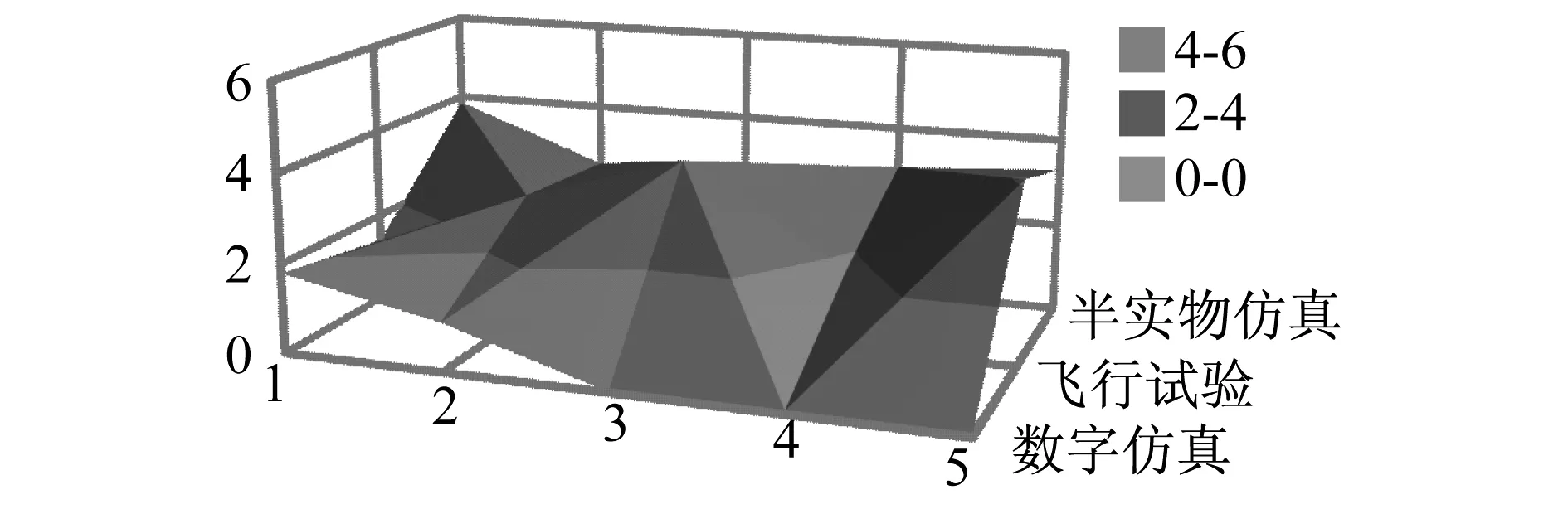
图6 验对比结果Fig.6 Error simulation analysis diagram
[1] 贾晓洪,梁晓庚,唐硕,周须峰,空空导弹成像制导系统动态仿真技术研究[J].航空学报,2005,26(4):397-401.
JIA Xiaohong,LIANG Xiaogeng,TANG Shuo,ZHOU Xufeng,Research on Dynamic Simulation Technical for Infrared Imaging Air to Air Missile Guidance System[J].Acta Aeronautica et Astronautica Sinica,2005,26(4):397-401.
[2] 吴根水,屠宁,赵松庆,陈海燕,红外成像制导空空导弹半实物仿真技术研究[J].航空武器技术专辑,2011,3:58-61.
WU Genshui,TU Ning,ZHAO Songqing,CHEN Haiyan,Research of Infrared Imaging Guide Hardware-in-the-Loop(HWIL) Simulation Technology[J].Special for Airborne Weapon,2011,3:58-61.
[3] 张小磊,宗光华,牛国臣,大扭矩电动负载模拟器的设计与研究[J].机械制造与自动化,2014,43(3):175-178,185.
ZHANG Xiaolei,ZONG Guanghua,NIU Guochen,Design of Large Torque Load Simulator and Its Research[J].Machine Building Automation,2014,43(3):175-178,185.
[4] 赵秋惠,空空导弹制导控制系统设计与仿真研究[D].西北工业大学,2006:10,11.
ZHAO Qiuhui,Design and Simulation of Guidance and Control System for Air-to-Air Missile[D].Northwestern Polytechnical University,2006:10,11.
[5] 岳超,董国才,喻戈,张健楠,基于RTX的导弹半实物仿真系统设计[J].弹箭与制导学报,2016,36(1):19-22.
YUE Chao,DONG Guocai,YU Ge,ZHANG Jiannan,Design of Missile Hardware-in-loop Simulation System Based on RTX[J].Journal of Projectiles,Rockets,Missiles and Guidance,2016,36(1):19-22.
[6] 李轩,江南,杜承烈,Windows 平台下的内存管理实时化研究[J].计算机工程,2013,39(7):102-105.
LI Xuan,JIANG Nan,DU Cheng-lie,Research on Real-time Memory Management Under Windows Platform[J].Computer Engineering,2013,39(7):102-105.
[7] 高宁军,张志勇,高超,陈春鹏.,基于制导武器的分布式半实物仿真系统研究[J].指挥控制与仿真,2010,32(6):74-78.
GAO Ningjun,ZHANG Zhiyong,GAO Chao,CHEN Chunpeng,Research of Distributed Hardware-in-the-loop Simulation System Based on Guided Weapons[J].Command Control & Simulation,2010,32(6):74-78.
[8] 单勇,实时半实物仿真平台关键技术研究与实现[D].国防科学技术大学,2010:21-26.
SHAN Yong,Research and Implementation of Key technologies of Real-Time Semi-physical Simulation Platform[D].Graduate School of National University of Defense Technology,2010:21-26.
[9] 李慧,甘霖,张文攀,梁巍巍.激光制导武器对抗半实物仿真弹干视线角模拟精度分析[J].激光与光电子学进展,2015,52(1):1-9.
LI Hui,GAN Lin,ZHANG Wenpan,LIANG Weiwei,Simulation Precision Analysis of Line of Sight Between Bomb and Target on Hardware in the Loop System for Laser Guided Weapon Countermeasure[J].Laser & Optoelectronics Progress,2015,52(1):1-9.

程明阳 (1978-) 男,河南南阳人,高工,主要从事空空导弹自动化测试方向的研究。
Research on the Key Technology of Missile Dynamic anti Jamming Test System
CHENG Mingyang
(Kaimai Control Co Ltd,Luoyang 471000,China)
First of all,the main system components and the closed-loop simulation test principle of the missile dynamic anti jamming test system are introduced briefly.The real-time simulation system is designed from three aspects:the architecture of the real-time simulation platform building,the design of clock synchronization system and the effective transmission of the information of each control node.The solutions about how to solve the high speed line of sight motion of target simulator with the pitch and yaw direction is proposed.The mathematical model of composite optical path is given,and the position of compound light path angle accuracy is confimed by test-analysis and can satisfy the requirements of simulation and test.Finally,the reliability and validity of the test results of the dynamic test system of the missile are verified by comparing with the test results of the air target test under the same conditions.
missile dynamic anti-jamming test; hardware-in-loop simulation; real time; high speed line of sight motion simulation
V 24
A
猜你喜欢
小哥白尼(趣味科学)(2021年6期)2021-11-02
故事作文·高年级(2021年4期)2021-05-06
小哥白尼(神奇星球)(2021年11期)2021-03-08
军事文摘(2020年14期)2020-12-17
电脑报(2019年31期)2019-09-10
当代陕西(2019年13期)2019-08-20
兵器知识(2019年1期)2019-01-23
小哥白尼(趣味科学)(2018年5期)2018-06-21
军营文化天地(2017年12期)2017-03-01
电脑爱好者(2015年21期)2015-09-10