基于RTK技术的极地冰川移动监测系统的试验研究
2016-12-14 07:48周云霄窦银科刘慧慧
太原理工大学学报 2016年4期
周云霄,窦银科,潘 曜,赵 琦,刘慧慧
(太原理工大学 电气与动力工程学院,太原 030024)
基于RTK技术的极地冰川移动监测系统的试验研究
周云霄,窦银科,潘 曜,赵 琦,刘慧慧
(太原理工大学 电气与动力工程学院,太原 030024)
基于PTK(Real Time Kinematic)技术,提出了利用铱星通讯系统进行数据远程传输的移动监测系统,其中基站和移动监测站由高精度GPS模块、数传电台与MSP430单片机控制器集成为一体。该系统以冰面抛投式移动浮标基站为载体,给出了监测系统的构成及数据采集及处理方法;并在野外实现了移动定位的实时监测试验。与常规定位进行比较,结果表明,该系统精度和稳定性均较高,移动监测精度可达厘米级,适用于冰川移动监测领域且将在中国第32次南极考察中进行应用试验。
RTK技术;冰川;移动监测;GPS定位;数据链
冰川是在重力作用下进行缓慢移动的,它的移动是研究和开发利用冰川资源的重要内容,也是防止冰川灾害重点研究课题之一[1]。冰川末端进退的变化在多种时间尺度上与气候过程相关联,因而它们又可以指示不同时间尺度的气候变化;冰川本身的物理特征及其与周围环境的密切关系,使得它的活动常引起许多重大的冰川灾害;冰川活动对水资源利用规划也有显著的现实意义,因此监测冰川移动显得尤为重要[2]。冰川移动是一个复杂多变的过程,而且由于冰川区域均属于极其偏远、人迹罕至、无电源无移动信号的恶劣客观条件下,因此无法用一般的监测手段进行移动监测[3]。本系统主要解决在无源区的移动监测,填补无信号区的自动化监测空白。目前,国际上对冰川移动的监测主要有以下几种方法:利用遥感和激光扫描方法自动化处理的航拍图像,然后将激光扫描和数字摄影测量的结果和精确的手动测量结果通过解析测图仪进行对比评价[4];地球物理研究杂志中对冰川边缘识别利用MODIS影像的位置变化自动监测[5];MULSOW et al利用多传感器C波段合成孔径雷达(SAR)对冰川边缘进行图像监控[6]。我国对极地冰川监测尚停留在分析航拍图片或卫星遥感定位的阶段,这种方法精度低、连续性差、获取的数据量少,无法对南极冰川移动进行连续的自动化的监测[7]。因此,本文提出的基于RTK技术的冰川监测系统有较大的实际意义。
1 RTK定位技术的发展过程及现状
RTK(Real Time Kinematic)技术是GPS测量技术与数据传输技术相结合,而构成的组合系统,是GPS测量技术发展中的一个新的突破[8]。
实时动态定位技术是以载波相位观测值为根据的实时差分GPS技术,它是GPS测量技术发展的一个新突破,在测绘、交通、能源、城市建设等领域有着广阔的应用前景[9]。本文将RTK定位技术用于无源条件下的冰川移动监测是一个创新点。
目前,RTK技术的研究主要集中在无基准站RTK技术方面,国外20世纪90年代中期提出了虚拟参考站技术,不久国内就提出了网络RTK技术,实现了RTK的无基准站模式,而且其测量距离也比较理想(可以达到100 km),逐渐成为现在RTK技术的研究热点[10]。随着各种科学技术的成熟以及生产和科研的需要,RTK技术的发展也势必向高精度、高效率、大范围、连续作业的方向发展[11]。RTK技术目前大多用于露天矿变形监测和预防山体滑坡自然灾害等的监测中[12],罗周全等提出了适用于露天矿边坡位移监测的高精度的GPS-RTK技术,并阐明了基于GPS-RTK的露天矿边坡位移自动监测系统[13]。
2 利用RTK技术进行冰川移动监测的原理
2.1 基本原理
本文设计的实时动态定位系统由基准站、移动站和双工的数据链组成,建立无线数据通讯是实时动态测量的保证。

图1 数据链路原理图Fig.1 Schematic diagram of data link
图1为数据链路原理图,其原理是取已知精度坐标的控制点作为基准点,安置一台接收机作为基准站,对卫星进行连续观测。基站GPS板卡内部在自我定位的同时,通过测算出一个基线向量,并将其发送给移动站。GPS 接收机测量出接收机至卫星的距离,加之通过其它方法获得卫星发出测距信号时卫星的坐标,在此过程中,接收机钟误差、卫星钟误差、星历误差、相对论效应、电离层延迟、对流层延迟、多路径效应等都会对定位结果产生一定的影响[14]。基线向量解算是指在卫星定位中,利用载波相位观测值或其差分观测值,求解两个同步观测站之间的基线向量坐标差的过程。此间进行多次数据处理,剔除观测值中的粗差,以修正卫星信号发射时刻及相应的星历坐标,从而获得良好的基线向量结果。基线解算是GPS数据处理的重要环节,它直接关系到测量的精度[15]。
移动站是用于监测可漂移冰川随时间变化的位移情况,移动站通过从数据链接收的基线向量和本身GPS定位卫星信号的数据作基线解算,得出一个差分后的、高精度的移动站定位数据,然后通过无线电链路向基准站发送其数据。基准站接收到该数据包后将其再打包通过铱星模块传输给远程计算机。后期经过分析处理后可以得到移动站的三维坐标漂移量和测量精度。这样就可以实时监测待测点的移动数据,从而减少冗余观测,实现远程自动监测,提高工作效率[16],图2为系统工作原理框图。此监测手段在国内外均属于前瞻性研究。

图2 系统工作原理框图Fig.2 The principle block diagram of system work
2.2 监测系统设计及硬件构成
通过利用RTK实时动态差分法原理,设计并在测量地投放集成铱星模块、GPS模块、差分模块、蓄电池模块、单片机主控模块、电台模块为一体的硬件系统。利用基站、移动站定位的GPS数据生成GPGGA语句,通过电台将定位数据进行站点之间的定时、定向传输,并在现场进行差分处理,再通过铱星通讯系统将差分后的数据包传输回国内的在线监测系统,实现对冰川移动的实时高精度监测[17]。系统结构示意如图3所示。
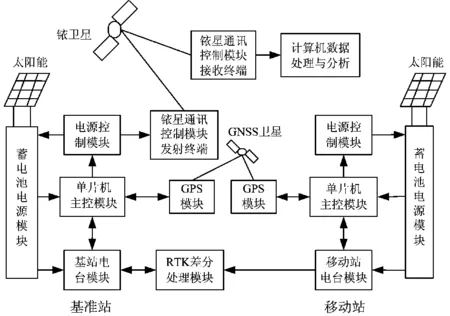
图3 系统结构示意图Fig.3 Sketch map of the system structure
该系统各部分功能模块的作用是:单片机主控模块用于控制站点系统的上电、断电并配置其初始命令等。每天在固定时间对整个系统进行上电检测,确认GPS模块正常后,连通电台链路,进行数据定位、差分运算、电台双向数据传输、铱星模块打包数据传输至计算机终端。单片机主控模块检测到经过一个完整上电过程后,开始控制断电,使系统处于关断状态;GPS模块可通过搜索相应区域在某一时刻经过的卫星数量进行一定精度的GPS定位,数据格式为GPGGA语句,该语句有读取方便、数据量小、便于传输、不易丢失、间断数据不影响后续差分功能的优点,其中GPS模块集成了差分运算功能,基站GPS模块具有搜星定位、基线解算的功能,可将实时定位的数据进行基线解算以后产生一组二进制的差分数据,移动站GPS模块具有搜星定位、RTK差分运算的功能,可将基站通过电台传输的差分数据与移动站定位数据进行RTK运算,其精度可达厘米级;电台使用的型号是ADL-35收发双工电台,该电台工作使用12 V电源供电,功耗为2~35 W,在通视良好无遮挡情况下可支持30~50 km数据链路传输。电台使用波特率为19 200 Bd;系统使用嵌入式SBD收发器——铱星9602模块,其体积小、重量轻,供电电压12 V,尤其相比其它通讯模块而言,其卫星多轨道低的配置使其具有搜星快,在全球范围无盲区,传输丢包率低的优点;蓄电池采用12 V低温蓄电池供电,原则为低功耗。在不需要定位采集、发送、保存数据的时候,整个系统处于低功耗的状态下,尽量节省电池的能量。工作温度为-40~+125 ℃,满足工作环境要求。
3 基于RTK技术的移动监测系统野外试验
3.1 GPS定位精度测试
GPS板卡搭载外围电路通过串口调试软件进行GPS定位精度的试验,数据包含基站的定位数据和移动站经过基线解算后的高精度差分数据。基站定位的GPGGA语句为:
$GPGGA,031628.00,3751.5685293,N,11231.0561085,E,1,09,1.0,803.3,M,-20.0,M,*44
移动站定位的GPGGA语句,上电初始为差分浮点解5,约1 min后为差分固定解4,其精度更高。
为便于检验试验精度并对数据进行观测分析,我们采取将试验数据直接导入计算机的方法,按照图1原理图所示,在基站侧设置一个COM端口用以实时监测定位数据。
现场布站采用基准站和一套移动站进行数据链路的通联,以验证基于RTK技术确实能有效提高定位精度。布站时站点距离较近,一是便于实验,二是验证定位精度即使在距离较近的情况下依然能满足站点GPS信号、电台链路通讯互不干涉。基站与移动站布站实际距离为2.14 m,取上电2 min以后的基站定位数据、移动站定位数据和移动站经过差分后的高精度数据,数据每间隔10 s采集一次,采集若干组。
3.2 试验GPS移动定位可行性
为了确认本套系统的外业可行性和稳定性,对系统进行远距离作业,在城市里通视情况相对较好的条件下进行试验,基站点设置在太原市北边的山脚下,移动站在由北向南流向的汾河柴村桥上,在低功耗情况下,可以确保10 km的通讯传输,以及非常高精度的定位。说明该系统有稳定的可行性。
后续为验证系统通联区间,在太原市东西方向较远的距离上进行测试,发现即使在电台低功耗2 W的情况下,依然可以稳定传输20 km的距离,并做到连续的移动监测。
3.3 数据分析
如表1所示的是距离2.14 m初始布站的情况,实验证明系统可以运行,而后对移动站偏移进行误差分析,将上电2 min以后的若干组基站定位数据、移动站定位数据和移动站经过差分后的高精度数据进行后处理,分别求其平均值和标准差,并将秒十进制格式的平均值转换为度分秒格式的平均值,然后在谷歌地球软件中导入平均值的点作为其定位点。经过距离测算可知,差分后的定位距离要比不差分的定位距离更加接近实际值,而且通过其标准差可知,差分后的定位点收敛性极好,因此可以证明利用RTK技术进行冰川移动监测的手段是可行的。

表1 定位经纬度数据及处理
如表2所示的基站与移动站在最小功耗情况下距离8.5 km(穿越城市边缘并不密集的遮挡建筑)可进行良好的数据定位通讯,结合实际位置显示,定位精度非常高,与实际位置几乎重叠,且定位点敛散性极好,说明采用RTK技术用于移动定位监测并通过无线链路传输数据具有较高的精确性。

表2 外业定位经纬度数据及处理
为验证无线电通讯的可靠性,在距离基站约20 km且低功耗条件下布设站点,并记录偏移定位位置,试验时按照由近到远、由远至近再基本画一个矩形框的粗略方式以充分确定其定位精度,结合实际位置在Matlab中绘制的移动轨迹如图4进一步说明本试验具有较高的精确性。
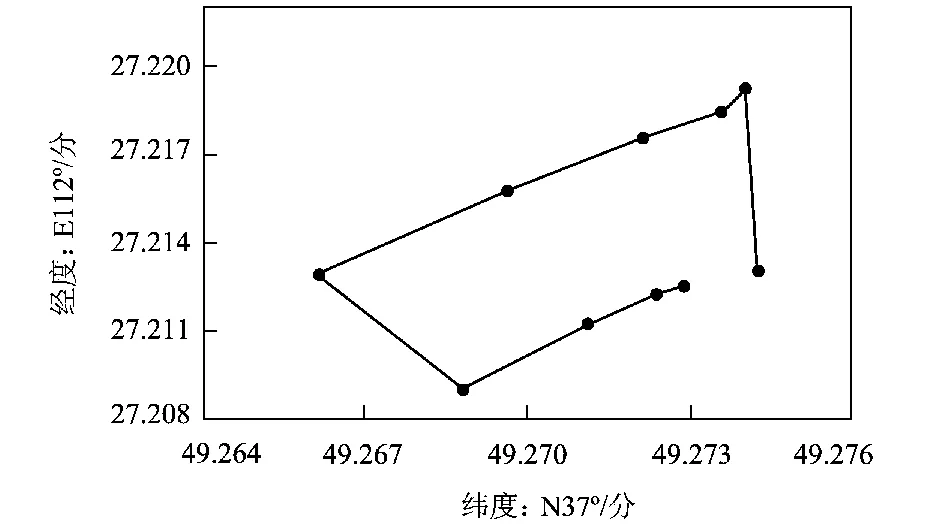
图4 Matlab中移动站移动轨迹Fig.4 Mobile station moving track in matlab
4 结束语
针对传统冰川监测手段无法获得连续性的移动情况,监测方法简单,受天气状况制约明显,以及数据量少等缺点,本文设计了基于RTK技术结合无线电链路传输、单片机控制技术建立了一种自动化、高精度化的移动监测系统,并通过野外试验证明该系统有较高的精度和较强的稳定性,监测精度可达2~5 cm,且具备特殊极地低温环境下的监测功能。
本文阐述的数据链路是结合稳定性和经济效益于一体的综合设计,单片机控制电路可确保系统高效、稳定运行,形成了一套完整的适用于冰川移动监测的新方法,该系统将在2015年开展的中国第32次南极考察中对南极中山站附近的冰川进行实际监测试验。
[1] 艾松涛,鄂栋臣,闫明,等.2005年北极冰川首期GPS监测[J].极地研究,2006,18(1):1-8.
[2] 王亚凤,温家洪,刘吉英.南极冰盖与冰川的快速变化[J].极地研究,2006,18(1):63-74.
[3] FISCHER A.Long-term glacier monitoring at the LTER test sites Hintereisferner,Kesselwandferner and Jamtalferner and other glaciers in Tyrol:a source of ancillary information for biological succession studies[J].Plant Ecology & Diversity,2013,6(3-4):537-547.
[4] MIR R A,JAIN S K,SARAF A K,et al.Glacier changes using satellite data and effect of climate in Tirungkhad basin located in western Himalaya[J].Geocarto International,2014,29(3):293-313.
[5] SEALE A,CHRISTOFFERSEN P,MUGFORD R I,et al.Ocean forcing of the Greenland Ice Sheet:Calving fronts and patterns of retreat identified by automatic satellite monitoring of eastern outlet glaciers[J].Journal of Geophysical Research: Earth Surface (2003-2012),2011,116(F3):239-255.
[6] MULSOW C,KOSCHITZKI R,MAAS H G.Photogrammetric monitoring of glacier margin lakes[J].Geomatics,Natural Hazards and Risk,2014XL-5/W3(5-7):1-14.
[7] HUANG L,LI Z,TIAN B,et al.Monitoring glacier zones and snow/firn line changes in the Qinghai-Tibetan Plateau using C-band SAR imagery[J].Remote Sensing of Environment,2013,137(10):17-30.
[8] 周大伟,吴侃,周鸣,等.地面三维激光扫描与RTK相结合建立开采沉陷观测站[J].测绘科学,2011,36(3):79-81.
[9] 余小龙,胡学奎.GPS RTK技术的优缺点及发展前景[J].测绘通报,2007,(10):39-41.
[10] 王帅,高井祥.浅谈RTK技术[J].勘察科学技术,2011,3:23-25+58.
[11] 黄功文,王君萍,张勇.GPS监测网中监测点统计检验方法研究[J].城市勘测,2007,6:63-65.
[12] 王利,张勤,李寻昌,等.GPS RTK技术用于滑坡动态实时变形监测的研究[J].工程地质学报,2011,2:193-198.
[13] 罗周全,邱灿红.GPS-RTK技术及其在露天矿边坡位移监测中的应用[J].地下空间与工程学报,2005,S1:80-83+86.
[14] 周忠谟等编著.GPS卫星测量原理与应用[M].北京:测绘出版社,1997.
[15] 刘文宝,陈永奇.GPS监测网的实用优化设计方法[J].工程勘察,1994,(3):49-52.
[16] BROWN C J,KARUMA R,ASHKENAZI V,et al.Monitoring of structures using the global positioning system[J].Proceedings of the ICE-Structures and Buildings,1999,134(1):97-105.
[17] BALTSAVIAS E P,FAVEY E,BAUDER A,et al.Digital surface modelling by airborne laser scanning and digital photogrammetry for glacier monitoring[J].The Photogrammetric Record,2001,17(98):243-273.
(编辑:刘笑达)
Experimental Study of Glacier Mobile Monitoring System Based on RTK Technology
ZHOU Yunxiao,DOU Yinke,PAN Yao,ZHAO Qi,LIU Huihui
(College of Electrical and Power Engineering,Taiyuan University of Technology,Taiyuan 030024,China)
RTK(Real Time Kinematic) as a modern geological survey technology has been widely used, but there is no instance for glacier monitoring.On the basis of GPS-RTK technology,with high-precision GPS module, data transmission radio and MSP430 single chip microcomputer controller,the base station and mobile station are integrated.It is a mobile monitoring system by using iridium communication for remote data transportation,which is supported on a dumped mobile ice buoy.The composition of the monitoring system and the method of data acquisition and processing are given,the real-time monitoring of mobile positioning test is roalized.Compared with those of conventional positioning,the accuracy and stability of the system are higher and the monitoring precision can reach cm level. It is suitable for mobile monitoring field of glacier movement and will be used for application tests in China 32nd Antarctic expedition.
RTK technology;glacier;mobile monitoring;GPS positioning;data link
1007-9432(2016)04-0501-05
2015-12-29
“南北极环境综合考察与评估”极地专项基金资助项目(CHINARE2015-02-09);国家自然科学基金资助项目:基于电容感应技术的海冰厚度自动化检测方法的研究(41176080)
周云霄(1989-),男,山西临汾人,硕士生,主要从事电力电子装置和冰川监测装置研究,(E-mail)315045852@qq.com
窦银科,教授,博导,主要从事智能仪器与自动化检测技术方面的研究,(E-mail)douyk8888@126.com
TP277
A
10.16355/j.cnki.issn1007-9432tyut.2016.04.013
猜你喜欢
数学杂志(2022年5期)2022-12-02
湘潭大学自然科学学报(2022年2期)2022-07-28
新世纪智能(数学备考)(2021年5期)2021-07-28
通信技术(2020年2期)2020-03-26
小天使·四年级语数英综合(2020年2期)2020-02-04
创新作文(1-2年级)(2019年2期)2019-08-06
电子制作(2017年8期)2017-06-05
探索科学(2017年4期)2017-05-04
中国交通信息化(2016年8期)2016-06-06
中学生数理化·八年级物理人教版(2014年1期)2015-01-09