漫谈有人机/无人机协同空战系统
2016-12-13 16:14范武
兵器知识 2016年12期
本文中,军事专家范武将为我们介绍无人机空战的有关作战概念。范武先生曾是中国空军的战斗机飞行员,长时间从事空军战术和作战概念研究,在军事学术上有很深的造诣。
在侦察监视和对地打击作战中,无人作战飞机已经成为空中作战体系的一支重要力量。很多人禁不住要问:无人作战飞机能否担负空对空作战任务,像歼击机一样,捉对厮杀于蓝天之上?
实际上,以美国为代表的少数几个空军强国已经开始了对无人机空战的研究,美国国防部国防高级研究计划局(DARPA)正式公布了其正在研发的“体系集成技术和试验”(SoSITE)项目,该项目聚焦于发展分布式空战系统的概念、架构和技术集成工具。SoSITE项目的体系架构将以现有航空系统的能力为基础,将飞机、武器、传感器和任务系统纳入其中,并可把各种空战能力分布于大量可互操作的有人和无人平台上。美国空军的军事专家在理论研究的基础上提出了更为具体的空战系统组合,他们设想一种基于四代战机和先进武器的协同空战系统:由一架F-22控制3架无人作战飞机,组成混合编队实施空中作战。无人机部署在F-22前面约100千米处打头阵,F-22则在飞向战区的途中关闭机载雷达,保持无线电静默,被动接收由无人机、高空侦察机以及卫星传送的作战信息数据。实施攻击前,F-22迅速打开机载雷达,搜索、发现和跟踪目标,指挥前置部署的无人战斗机发射武器,实施攻击。
未来,无人机将会以不同的作战样式投入空战,其中,有人机与无人机组成一个空战系统,通过有利的战术配置和作战协同抗击对手,将是一种有效、可行的作战样式。本文下面将具体介绍这种空战概念,其中包括:有人机/无人机协同空战系统应该由哪些作战单元组成?这些不同的作战单元在种类和数量上应该如何搭配?各作战单元在空中布势上应该保持什么样的战斗队形?在明确基本作战概念的基础上,我们将进一步分析空战系统在中远距空战中具有什么样的作战优势?空战系统的作战原则和作战流程又是什么?最后利用一个空战系统实施中远距空战的假设案例来呈现空战系统实施空战的细节,加深大家对这一新型空战系统的认识。

空战系统组成
有人机/无人机协同空战系统(以下简称为空战系统)是一种小型空战体系,空战系统的无人机具有不同的单项作战能力,空中作战时,各作战平台按战术协同担负不同的作战任务。
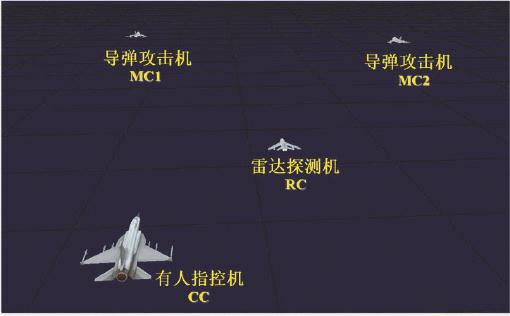
空战系统通常可由一架双座的有人战斗机和多架无人机组成,有人机不仅负责对无人机的指挥控制,也要担负对敌攻击任务;无人机则分别担负对目标的雷达探测以及远距空空导弹攻击任务。显然,空战系统内担负攻击任务的无人机越多,空战系统的攻击威力越强。但是,为了使有人机指挥控制员在空战中能够对无人机进行有条不紊的指挥控制,无人机的数量不宜过多。通过综合分析,比较理想的空战系统应由一架有人机和三架无人机组成:一架有人指挥控制机(Command Craft,以下简称CC);一架无人雷达探测机(Radar Car? rier,以下简称RC),仅装载火控雷达;两架无人导弹攻击机(Missile Carrier,以下简称MC),仅挂载远距空空导弹。这种有人机/无人机协同空战系统简称“一带三”空战系统。
那么,为什么不使用更易于指挥控制的“一带二”空战系统?“一带二”空战系统由一架有人机带两架无人机(一架雷达机、一架攻击机)组成,组合攻击能力太弱。而“一带三”空战系统(一架有人机带一架雷达机和两架攻击机)才能达成攻击力量与探测能力的有效配合,发挥多点协同攻击的优势,在有人机的指挥下战胜对手。在战术运用方面,“一带三”组合不仅非常有利于实施战术创新、达成体系作战的威力,同时也很有利于扰乱敌方飞机的指挥决策、消耗敌机的空空导弹。
“一带三”空战系统会不会给有人机的指挥控制员带来过多的工作难度,以致于在复杂的空战态势下顾此失彼,无法及时指挥,降低空战效能?与传统的近距格斗不同,在中远距空战中,作战飞机并不需要实施频繁、剧烈的战术机动,不需要指挥控制人员在空战全过程中进行连续、复杂的指挥制导。即便是在交战过程中需要进行战术规避时,因为对手是在远距离攻击,机动摆脱难度相对较小,己方可在战法设计上尽可能使用简单、规范的战术机动动作,使指挥控制员只需要一个指令就能指挥无人机实施有效的战术机动。比如,在超视距空战中,只需要无人机实施50°坡度的水平盘旋机动就能满足战术规避的需要(海湾战争中美军摆脱伊军超视距攻击的实战经验也是这样)。经过更多的分析可认为,在超视距空战时,空战系统的无人机只需要采用50°坡度的盘旋机动(360°水平转弯)就能在远距离攻击中摆脱对手的导弹攻击。
空战系统基本队形
在超视距空战中,空战系统的作战队形将直接影响作战效能的发挥,空战系统中各作战平台之间的间隔、距离、高度差必须根据有人机与无人机的飞行性能、机载火控雷达的探测制导能力、导弹性能、有人机的操控能力、无人机的自主飞行控制能力,以及空战系统的攻击模式等多种因素综合确定。原则上讲,空战系统战斗队形的确定应该遵守以下四个要求。
一是无人攻击机应部署在空战系统的最前端,尽可能隐蔽接近目标。无人攻击机仅挂载远距空空导弹,飞行中被动接收有人机的指挥制导信息,无人攻击机不发射无线电信号,在空战接敌过程中保持静默飞行,不易被敌发现,有利于实施抢攻战术。同时,在交战过程中,无人攻击机前置还有利于保护后置的雷达机和有人机。
二是队形的选择必须便于雷达探测机获取信息优势。战斗队形的设置必须能够充分发挥无人探测机机载雷达的性能,扩大搜索探测范围,便于在接敌阶段更早、更快地发现目标。尽管雷达探测距离一般都远大于空空导弹的攻击距离,但是,也不应将雷达机布置在导弹攻击机后面很远的地方,应留出充分的时间让有人机控制员进行指挥决策。
三是队形的选择要有利于保护有人机的安全,同时又能确保有人机对无人机实施及时的指挥控制。有人机应在空战系统中靠后配置,有人机与无人机的前后距离越大,就越可获得更大的安全距离,可保证有人机在无人机交战时还处于敌攻击范围之外,但后置距离太远则不利于有人机及时参与空中攻击。
四是队形的选择还应有利于系统内各作战平台的机动飞行,不致于因无人机的空中机动而影响飞行空全。有人机与无人机应保持较大的间隔、距离,各机之间通过数据链联系,在规避对手导弹的攻击时,无人机可根据指挥机的控制进行水平机动,保持各机之间的飞行轨迹不交叉。为确保安全,各机之间应取出较大的高度差,使各机在不同高度层活动。
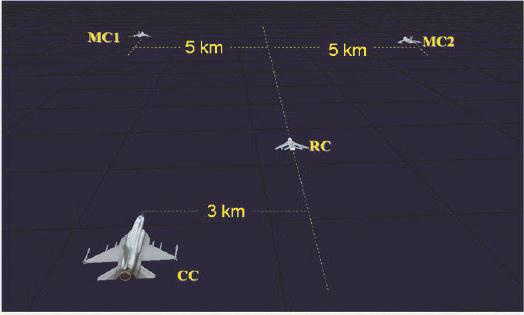
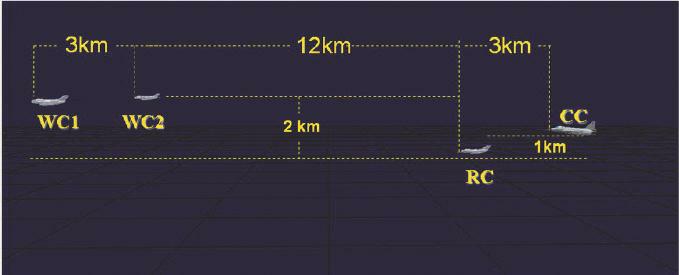
例如,在空中布势上,空战系统采用T字阵形。两架无人攻击机MC1和MC2前置部署于高空,双机间隔10千米,前后距离3千米,飞行高度均为8 000米。
雷达机RC靠后配置,位于两架无人攻击机之间,与MC1和MC2的间隔均为5千米,与无人攻击机MC2的距离为12千米,飞行高度6 000米。
有人指控机CC部署在最后,与雷达机RC距离3千米,位于雷达机左侧3千米处,飞行高度7 000米。各机之间保持大间隔距离的疏开队形,通过无线电或数据链联系。
确定空战系统各作战单元飞行高度的基本依据有三点。
一是要有利于发挥无人机的飞行性能。通常,无人机将会因挂载空空导弹或机载雷达而降低飞行性能,以致于高空机动能力较差,不利于机动作战。因此,空战高度应保持在8 000米以下。
二是有利于增大无人攻击机的导弹射程。影响中远距空空导弹发射的因素之一是载机的发射高度,通常,载机飞行高度越高,导弹的发射距离越远。因此,在空战系统中,应尽可能将无人攻击机配置在较高高度上,8 000米高度既能使无人攻击机保持良好的机动性,又可保证导弹具有较大的发射距离。
三是有利于提高无人雷达载机的探测性能。雷达载机配置在6 000米高度,有利于充分发挥机载雷达上视探测能力强的优势。敌方飞机(有人战斗机)的机载雷达性能虽优于己方无人雷达载机性能,但在探测低位目标时,下视探测距离要有损失,下视探测距离通常为上视探测距离的2/3,己方雷达载机采用敌高我低的高度部署将有利于减小与对手在探测能力上的差距。
空战系统作战优势
有人机/无人机协同空战系统在目前的空空作战中还未出现过。通过理论分析可看到其作战优势,这些优势来自于空战系统的分布式部署和战术协同。
优势一:无人机隐蔽接敌无人攻击机部署在最前方,在整个接敌过程中保持无线电静默,与发射辐射信号的雷达机和有人机分布配置,可实现隐蔽接敌攻击。导弹机与雷达机分别从不同方向接近目标,雷达机开机照射目标,导弹机保持静默,雷达波照射方向与导弹攻击方向分离,对手的机载雷达接收机最初只能根据雷达波判断出雷达机的来袭方向,无法准确判断导弹机的来袭方向,有利于导弹机隐蔽接敌攻击。
优势二:真正的发射后不管分布式空战系统中,制导平台和发射平台分开部署,攻击机发射导弹后,并不需要攻击机本身对导弹进行继续制导,而是由有人机担负中段指令制导任务,所以,无人攻击机实施的是真正的发射后不管攻击。严格地说,传统的超视距空战并没有真正的发射后不管攻击战术,即便是使用主动雷达弹,也需要载机在发射导弹后继续对导弹进行连续稳定的中段指令制导,只有当导弹进入末制导之后,载机才可以机动脱离,这时才进入了发射后不管状态。分布式空战系统的中段指令制导完全由另一架制导机来完成,不仅可保证无人攻击机在危险态势下也能对敌发起攻击,还可使其在发射导弹后立即机动脱离,引诱、规避敌机的导弹攻击,为其它飞机的攻击创造条件。


优势三:无人机迎头抢攻无人机上没有飞行员,完全是在指令控制下飞行,不会像有人机那样,在危险态势下受到飞行员心理压力的影响。无人机即使是在敌机火控雷达的跟踪锁定下也可以临危不惧、十分“冷静地”发射导弹,大有与敌同归于尽的英雄气概。“狭路相逢勇者胜”,凭着无人机的勇猛,可以达成抢攻优势,在敌我能力相当的情况下,与敌展开对攻。即便是在敌优我劣的态势下,敌机先于我机发射导弹,只要无人攻击机没有进入敌导弹的不可逃逸区,也可“勇敢地”逼进发射区发射导弹,然后立即机动脱离。无人攻击机的迎头勇猛抢攻,有利于扰乱敌指挥制导,迫使敌面对威胁实施机动、放弃攻击。
优势四:攻击机连续交替攻击空战系统中两架无人攻击机一前一后、一左一右分散布势,有利于对敌机实施不同方向的连续交替攻击。前置的无人攻击机MC1抢先发射导弹后迅速左盘旋机动脱离,与此同时,后置的无人攻击机MC2不断接近目标,构成发射条件后,有人机发出指令,MC2立即发射导弹实施攻击,并右盘旋机动脱离。随后,完成盘旋机动的无人攻击机MC1再次达成发射条件,展开第二波攻击。MC2结束盘旋机动后也再次对目标发起轮番攻击。
优势五:指挥机与雷达机接力无人攻击机对目标实施攻击以及导弹的中段指令制导都离不开稳定的雷达保障。通常,雷达信息来自于雷达载机RC,雷达机在敌导弹射程外稳定、连续地照射和跟踪目标。但是当两架攻击机均未首发命中目标时,必须发起第二轮超视距攻击,在这种情况下,雷达机有可能进入敌机的导弹射程,遭到敌导弹攻击,所以雷达机应主动回转脱离。此时,有人机应打开机载雷达,接替雷达机提供连续的信息保障,指挥无人攻击机再次攻击。
优势六:有人机饱和攻击协同空战系统作为一种新型作战系统,有其自身的作战特点。有人机是整个作战系统的大脑,指挥无人攻击机作战。但是,当无人机多次攻击未果,目标进入有人机的导弹射程时,有人机也应抓住战机,及时发射导弹,对目标发起饱和攻击。
空战系统作战原则

空战系统的各作战单元在空中进行分布式配置,将会产生更多的战术变化。空战系统应发挥多平台攻击的优势,力争在中距阶段交替猛攻,避免与其近距空战。空战系统的作战原则是:体系作战,远距抢攻,协同攻防,中距决胜。
体系作战空战系统虽然在空中采用分散配置,但在作战使用上必须时刻保持一个整体。各作战平台必须遂行各自的任务,防止信息保障与火力攻击的脱节。空战系统要充分发挥无人机敢打敢拚的优势,在接敌阶段,无人机保持静默飞行,保持相对稳定的空中布势逼近目标,积极抢攻,为后续攻击创造条件。
远距抢攻在超视距空战中,特别是当敌机导弹性能优于己方导弹性能,或是双方作战能力基本相当的情况下,空战系统需要通过攻势行动和抢攻行动,创造出有利的战术态势。一般来讲,中等性能空空导弹的最大射程都会远大于先进导弹的不可逃逸区距离,因此,即便是己方无人攻击机导弹性能不占优的情况下,也完全可以在进入敌导弹的不可逃逸区之前实施攻击,发射后立即脱离。此时,敌机将面临我机的导弹威胁,无法保持对我机的稳定攻击,从而扰乱敌机的稳定制导。

协同攻防协同攻防主要指空战系统中各作战平台之间,特别是有人机与无人攻击机以及雷达载机之间的配合。无人攻击机发射导弹后应迅速机动脱离,规避敌方攻击,同时也可吸引敌方火力,另一架无人攻击机应抓住敌方发射导弹后实施中段指令制导的稳定飞行阶段,对敌发起连续攻击,逼迫对手放弃对我机的攻击制导。
中距决胜在第一架无人攻击机首次发射导弹、远距抢攻的基础上,另一架无人攻击机与有人机要抓住战机,趁势对敌发起轮番攻击,在敌规避、尚未完全发挥火力之前,对敌实施饱和攻击,争取通过远距的首波攻击和中距的轮番攻击摧毁敌机,实现远距决战、中距决胜。
空战系统作战过程
超视距空对空作战中,地面警戒雷达或预警指挥飞机发现空中来袭目标后,指挥空战系统起飞并引导其飞向战区。在与目标相向飞行的接敌过程中,根据地面或预警指挥机的目标信息通报,无人雷达机开机搜索目标。
无人雷达机发现目标后,迅速通过数据链传给指挥机,控制员操控无人机向目标飞行,同时进行敌我识别,然后对目标进行手动截获或自动截获和锁定。有人机控制员操控无人机向目标迎头飞行,当跟踪状态稳定后,导弹进入准备发射阶段。当飞行员发现具备导弹发射条件时,操控无人攻击机发射超视距空空导弹,雷达机始终跟踪照射目标,回传更新目标数据,导弹接收到新的目标位置后修正航向,更加精确地飞向目标。
攻击机发射导弹时也将面临对手的攻击,因此,攻击机必须进行水平盘旋机动,同时也吸引敌机的火力,为他机攻击创造条件。靠后部署的二号无人攻击机隐蔽接近目标,构成攻击条件后迅速对敌攻击,然后同样实施发射后不管机动。
当目标机发现导弹来袭时,将会大过载机动规避,无人攻击机首次攻击将无法命中目标,此时应在盘旋机动后再次攻击,必要时,有人机也应抓住时机发射导弹,对目标机实施饱和攻击。空战结束后,有人机与无人机协同返航。

空战系统空战案例分析
为了使大家对空战过程有一个直观的认识,我们可以设置一个空战想定来分析中、远距空战中一个空战系统与一架敌机的空战对抗,而且在红蓝双方作战能力设置上,假定红蓝双方的武器性能势均力敌,双方在中远距空战对抗中并无明显优劣。
既然是均势,就意味着红方空战系统中的无人攻击机在对目标发射导弹的同时,蓝方飞机也具备了攻击条件并对红方无人攻击机发射导弹攻击。因此,无人攻击机在发射导弹后必须立即机动脱离,摆脱对方导弹的跟踪,导弹的中段指挥制导任务由靠后部署的有人机承担。但是,蓝方飞机则不同,由于蓝方战斗机需要对导弹实施中段指令制导,在发射导弹后却不能立即机动规避,只有在导弹进入末制导后才能机动。红方无人攻击机首次攻击,距离相对较远,远未进入蓝方导弹的不可逃逸区,所以比较容易摆脱蓝方的攻击。一旦摆脱导弹跟踪,红方无人攻击机应尽快创造再次攻击条件,对蓝方飞机发射第二枚导弹。蓝方战斗机由于实施照射制导,机动时机较晚,摆脱红方导弹攻击的难度增大。
由于篇幅有限,在此不详细介绍模拟设置的各个具体条件及过程,只呈现当飞机只要被命中一发导弹就视为被摧毁的情况下空战模拟过程及评估结果。
空战模拟过程如下:
50.8秒,蓝方飞机雷达进入边扫描边测距工作模式;
102.6秒,蓝方飞机雷达进入边扫描边跟踪工作模式;
102.7秒,蓝方飞机雷达进入跟踪工作模式;

114.1秒,RC雷达进入边扫描边测距工作模式;
114.3秒,CC雷达进入边扫描边测距工作模式;
157.7秒,RC雷达进入边扫描边跟踪工作模式;
157.8秒,RC雷达进入跟踪模式;
162.4秒,CC雷达进入边扫描边跟踪工作模式;
162.5秒,CC雷达进入跟踪模式;
162.8秒,MC1在距离目标37 027米时发射一枚导弹攻击蓝方飞机;
164.3秒,MC1进入水平转弯,坡度50°,左转360°;
165.1秒,蓝方在距离目标36 124米时发射一枚导弹攻击MC1;
170.5秒,MC2在距离目标37 032米时发射一枚导弹攻击蓝方飞机;
172.5秒,MC2进入水平转弯,坡度50°,右转360°;
179.7秒,MC1发射的一枚攻击蓝方的导弹转入末制导阶段;
182.4秒,蓝方发射的一枚攻击MC1的导弹转入末制导阶段;
182.5秒,蓝方雷达进入边扫描边测距工作模式;
183.1秒,蓝方进入水平转弯,坡度60°,左转360°;
187.4秒,MC2发射的一枚攻击蓝方的导弹转入末制导阶段;
189.6秒,蓝方雷达进入跟踪模式;
191.7秒,蓝方在距离目标30 157米时发射一枚导弹攻击MC2;
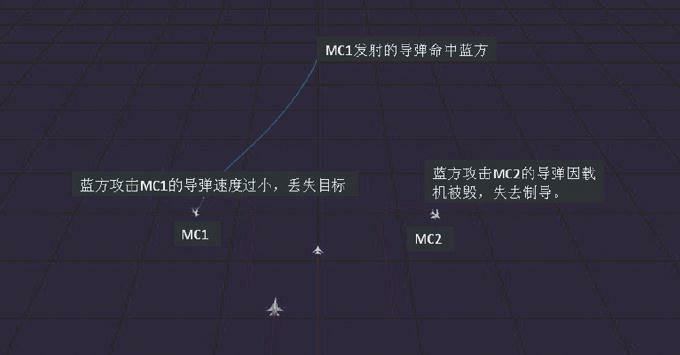
198.4秒,MC1发射的一枚导弹命中蓝方;
198.4秒,MC2发射的一枚攻击蓝方的导弹在末制导阶段丢失目标,进入惯性飞行搜索阶段;
198.4秒,蓝方发射的一枚攻击MC2的导弹失去制导信息,自毁;
212.7秒,蓝方发射的一枚攻击MC1的导弹速度过小,丢失目标。
空战评估结果统计如下。
红方RC:被攻击次数0,被命中次数0,生存概率1;
红方MC1:被攻击次数1,被命中次数0,生存概率1;
红方MC2:被攻击次数1,被命中次数0,生存概率1;
红方CC:被攻击次数0,被命中次数0,生存概率1;
蓝方战斗机:被攻击次数2,被命中次数1,生存概率0。
从模拟空战结果看,红方平均生存概率1,红方平均生存架数4,蓝方平均生存概率0,蓝方平均生存架数0,红蓝双方空战损失比为零比一。总之,无人机空战将成为新的作战样式,必须创新作战理念,形成体系作战威力。
猜你喜欢
军事文摘(2020年3期)2020-04-02
小学生学习指导·小军迷联盟(2019年2期)2019-09-10
小学生学习指导·小军迷联盟(2019年10期)2019-09-10
兵器知识(2018年6期)2018-06-15
兵器知识(2018年3期)2018-03-07
兵器知识(2018年2期)2018-02-08
兵器知识(2018年1期)2018-01-05
连环画报(2015年12期)2016-01-14
航空知识(2000年8期)2000-06-07