
大行程无耦合二维精密微定位平台设计与分析
2016-12-13 05:35徐方超段振云
重型机械 2016年5期
徐方超,陆 鹤, 孙 凤,段振云
(沈阳工业大学 机械工程学院,辽宁 沈阳,110870)
大行程无耦合二维精密微定位平台设计与分析
徐方超,陆 鹤, 孙 凤,段振云
(沈阳工业大学 机械工程学院,辽宁 沈阳,110870)
为了满足当前精密重型设备对于大行程微定位平台的需求,本文提出了一种压电驱动大行程无耦合的二维精密微定位平台,该平台以压电陶瓷作为驱动元件,利用菱形位移放大机构对位移进行放大输出,同时实现了平台二维大行程、无耦合独立运动。设计了微定位平台的结构,分析了平台的工作原理;运用正交分析法研究了菱形位移放大机构位移输出的影响因素,优化了菱形位移放大机构,得出了平台优化的设计参数;通过有限元软件进行仿真分析,得到了平台的输出位移、位移放大倍数、刚度、固有频率、谐响应频率及最大位移输入时的应力。
微定位平台;菱形位移放大机构;压电陶瓷驱动器;大行程
0 前言
当前,重型机械设备超精密加工、激光加工、MEMS(微电机系统)、生物医学等领域均需要大行程纳米级定位平台[1-4]。目前,微定位平台的主要驱动形式有机电驱动式、电热式、电磁式、磁致伸缩式和压电驱动式[5]。随着纳米科技的兴起和迅猛发展,压电致动器,尤其是叠层压电驱动器由于具有响应速度快、分辨率高、输出力大、发热量小、输出位移稳定、体积小且能实现低压驱动等优势,使其在微定位平台的开发应用中拥有良好的应用前景[6-7]。
但是,由于叠层压电陶瓷的输出位移较小,使其应用范围受到了限制,因此需对叠层压电陶瓷驱动器的输出位移进行放大。目前研究人员已提出了杠杆放大、桥式放大和三角放大等多种压电微位移放大机构。万德安设计了二级杠杆位移放大机构,该机构放大倍数为8.3[8]。徐青松和李杨民设计了压电驱动的混合桥式位移放大机构,该机构放大倍数为8.2[9]。朱华和曹如意等人设计了基于三角位移放大原理的压电驱动位移放大机构,并将其用于光学干涉显微镜,该机构的放大倍数为7.0[10]。目前,研究人员设计的大行程微定位平台的放大倍数很少大于10。
本文提出一种压电驱动大行程无耦合的二维精密微定位平台,该平台以压电陶瓷驱动的菱形位移放大机构为核心驱动单元,对目前常用的菱形位移放大机构进行研究,运用正交分析法研究了菱形位移放大机构弹性杆和水平方向夹角值θ、弹性杆的加长长度L、开口宽度W三个结构参数对平台位移输出放大倍数的影响,并采用有限元仿真分析了平台的工作性能。
1 微定位平台结构
如图1所示,本文设计的平台是双层嵌套式平台,通过改变输入电压控制压电陶瓷的位移输出,位移输出通过菱形位移放大机构传递给工作台。工作台一端与长臂铰链连接,工作台另一端与两个串联的菱形位移放大机构连接,长臂铰链与串联的菱形位移放大机构嵌套在内层基板上,构成了平台的内层机构,实现了工作台Y方向的单独运动。内层机构一端与长臂铰链连接,另一端与菱形位移放大机构连接,长臂铰链与X方向菱形位移放大机构连接在固定的外层基板上,实现了工作台X方向的单独运动。
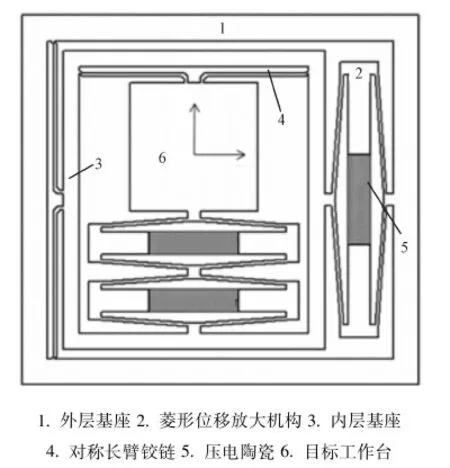
图1 二维精密微定位平台结构图Fig.1 Structure of the precision micro-positioning platform
该平台选用7075-AL作为材料,7075-Al的弹性模量为71 GPa,泊松比为0.33,屈服强度为505 MPa,平台的整体结构尺寸为115 mm×124 mm×10 mm。选用压电陶瓷的型号为P150/10×10×28,最大位移输出30 μm,刚度为60 N/μm。
2 菱形位移放大机构特性分析
本文设计的微定位平台要求工作台最大位移输出量大于250 μm。微定位平台能否达到这一要求主要取决于菱形位移放大机构的工作性能。
2.1 菱形位移放大机构几何放大倍数
菱形位移放大机构,可以给压电陶瓷提供预紧力,并实现位移放大功能以及与基板相连。当给压电陶瓷位移输入时,压电陶瓷会沿轴向输出位移,同时菱形位移放大机构会输出一个竖直方向的位移,从而实现横向变竖向的位移放大。
菱形位移放大机构为对称结构,可以减小应力集中,菱形位移放大机构工作前与工作后的变形如图2所示,其中L1、L2分别为菱形框2条边的边长,ΔL/2和H分别为输入和输出位移。
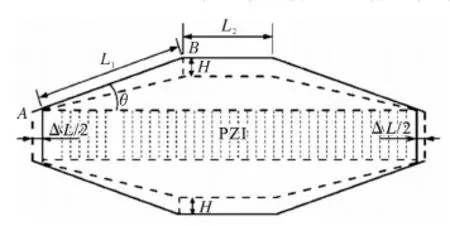
图2 菱形微位移放大机构工作示意图Fig.2 Operational principle of the diamond micro-displacement amplification mechanism
通过图2,可得到压电堆输入位移和菱形微位移放大机构放大后输出位移的关系式如下:
整理后得
将上式关于ΔL作泰勒级数展开,可化为
(1)
式中,ΔL为压电陶瓷的输入位移;H为菱形位移放大机构的位移输出;θ为初始状态时弹性杆AB与水平方向的夹角;L1为弹性杆AB的长度。当ΔL/L1时,式(1)中的ΔL/L1可看作是无穷小量,从而可得到式(1)的简化线性关系表达式
设Ra=2H/ΔL为菱形位移放大机构的几何放大系数。
Ra=2H/ΔL=cotθ
(2)
由式(2)可以看出,菱形位移放大机构的位移输入与位移输出为线性关系,即菱形位移放大机构的放大倍数为常数。
2.1 分析方案
改进后的菱形位移放大机构如图3所示,菱形位移放大机构弹性杆和水平方向夹角值θ、弹性杆的水平方向加长长度L和开口宽度W是影响位移输出的三个主要结构因素。为了进一步研究弹性杆和水平方向夹角值θ、长度L和开口宽度W三个主要结构参数对平台位移输出量的影响,利用有限元软件,采用正交分析法对菱形位移放大机构进行仿真研究,并设计了三因素四水平的正交分析,因素水平表如表1所示。
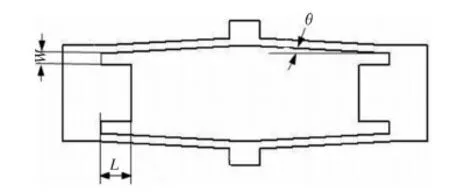
图3 菱形位移放大机构Fig.3 Diamond micro-displacement amplification mechanism
2.2 分析与结果
根据因素数和水平数选取L16(43)正交表, 制定正交分析方案, 对各方案进行有限元分析, 得出分析结果如表2所示。
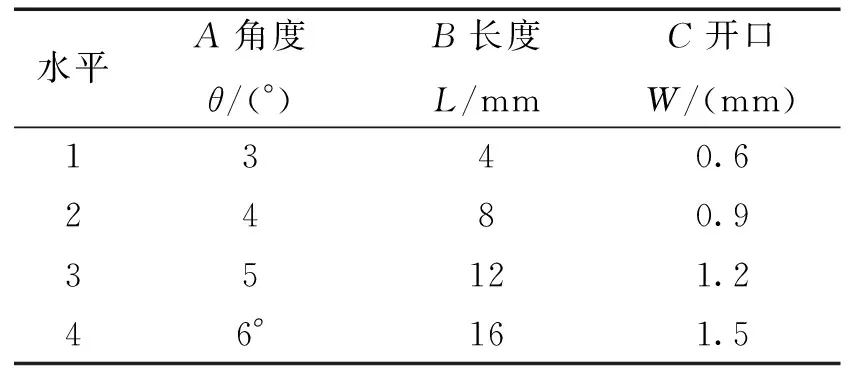
表1 三因素四水平正交表

表2 L16 (43 )正交分析方案及分析结果
2.3 方差分析结果
表3为仿真分析的方差分析结果。由方差分析结果可以看出因素B对菱形位移放大机构的位移输出影响最大,影响位移输出的三个因素的主次顺序为:B>A>C。因素A和因素B的sig值均为0.001,小于0.01的比较值,所以因素A和因素B对位移输出的影响极为显著;因素C的sig值为0.023,大于0.01的比较值,所以因素C对于位移输出影响显著。

表3 方差分析表
图4为根据仿真分析得到的因素水平趋势图,由结果可以得到菱形位移放大机构的优化设计参数:A因素的水平2,B因素的水平4,C因素的水平3。但是,开口宽度的增加可以减小压电陶瓷驱动器的直径,降低平台成本,所以应该选择C因素水平4作为优化参数,综合考虑C因素选择水平4。
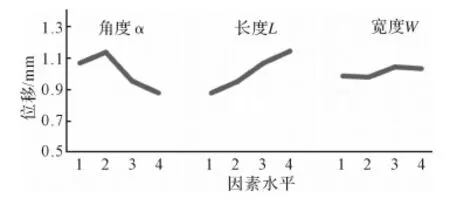
图4 因素水平趋势图Fig.4 Factor level trend chart
3 微定位平台的优化与分析
3.1 结构参数优化
根据仿真分析的结果,优化微定位平台的结构参数,选定Y方向菱形位移放大机构的弹性杆和水平方向夹角值θ为4°,弹性杆长度为27.14 mm,开口宽度为1.5 mm;选定X方向菱形位移放大机构弹性杆和水平方向夹角值θ为4°,弹性杆长度为37.14 mm,开口宽度为1.5 mm。
将θ=4°带入式(2),得到菱形位移放大机构的放大倍数为Ra=14.3。
3.2 位移输出分析
采用有限元软件对微定位平台进行有限元仿真分析,为了提高计算精度,平台的有限元模型采用solid185单元,材料为铝合金,材料弹性模量为 71 GPa,泊松比0.33,密度为2770 kg/m3,为了获得精确的结果,同时考虑柔性铰链的尺寸较小,铰链处网格密度设为0.1 mm,其他地方网格密度设为 0.5 mm,约束作用于图5a所示模型的四个侧面。
利用有限元软件对平台优化方案进行位移输出量分析,其分析结果如图5a所示。如图5b所示,在压电陶瓷驱动器位移输入为30 μm时,平台的X方向最大位移输出量为369 μm,放大倍数为12.3;图5c所示,Y方向最大位移输出为304 μm,放大倍数为10.1,平台的位移输出量达到了250 μm的设计要求。
菱形位移放大机构的有限元分析结果小于几何放大倍数,因为理论计算把菱形位移放大机构视为刚体,同时弹性对称长臂铰链的有势力减小了位移放大机构的位移输出。
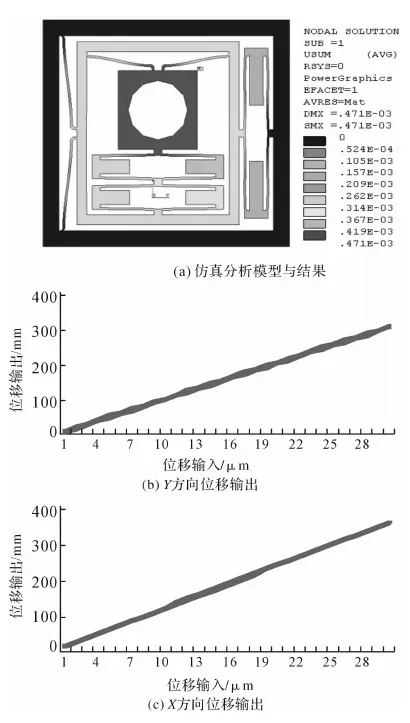
图5 微定位平台的位移分析Fig.5 Displacement analysis of micro-positioning platform
3.3 刚度及模态分析
在驱动端施加单位力载荷,测量输入端和输出端的位移,计算可得平台的输入刚度值。通过有限元软件分析,平台Y方向的输入刚度为23.419 N/um;平台X方向的输入刚度为21.322 N/um。
对平台进行了模态分析及谐响应分析,表4为平台的前四阶振型对应的固有频率,图6为平台的振幅频率响应曲线,通过有限元分析平台振幅最高点的载荷输入频率为156.2 Hz,平台的工作载荷输入频率要远低于共振频率。所以,平台的振动稳定性满足使用要求。

表4 前四阶振型固有频率表
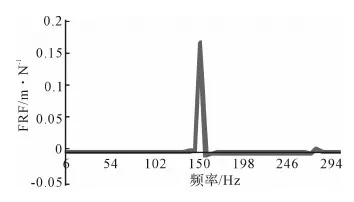
图6 频率响应曲线Fig.6 Frequency response
3.4 强度分析
如图7所示,通过有限元分析,微定位平台在输入位移为30 μm时,微定位平台工作应力为78.4 MPa,而7075-AL的屈服极限为505 MPa。所以,平台的工作强度满足了使用要求。

图7 微定位平台的应力分析Fig.7 Stress analysis of micro-positioning platform
4 结论
本文提出了一种压电驱动大行程无耦合的二维精密微定位平台,采用有限元分析法对菱形位移放大机构的结构参数进行了优化设计,提高了位移的放大倍数。有限元分析结果表明,优化后 的微定位平台输入位移为30 μm时,Y方向最大位移输出量为369 μm,放大倍数为12.3;微定位平台X方向最大位移输出量为304 μm,放大倍数为10.1,且平台X、Y两个方向可独立运动;平台的位移、刚度、固有频率、共振频率和工作应力可满足使用要求。
[1] 汪建业,邓 丽,刘福兰. 重型机械制造业现状与发展趋势的分析和思考[J].重型机械,2008,5(13);1-5.
[2] 张彦斐,宫金良.2自由度大行程微定位平台结构与参数设计[J].机械工程学报,2010,46(23):30-35.
[3] 黄卫清,史小庆,王寅.菱形压电微位移放大机构的设[J]. 光学 精密工程,2015,23(3):803-809.
[4] 高峰. 机构学研究现状与发展趋势的思考[J].机械工程学报,2005,41(8):3-17.
[5] 良延德,方小东. 基于新型菱形放大机构的微位移工作台结构研究[M].大连:大连理工大学,2011.
[6] 靳宏,金龙,徐志科. 压电叠堆位移放大致动器的动态特性[J]. 振动与冲击,2012,31(21):146-151.
[7] 张春林,张希农,陈杰. 菱形微位移压电作动器的输入输出线性建模[J].西安大学学报,48(5):102-106.
[8] 万德安,刘春节,汲长志. 压电驱动微位移放大机构的分析与实验[J]. 机床与液压,2005,2(12):12-14.
[9] Qingsong Xu, Yangmin Li. Analytical modeling optimization and testing of a compound bridge-type compliant displacement amplifier[J].Mechanism and Machine Theory, 2011, 46(2): 183-200.
[10]朱华,曹如意,菅磊. 应用于干涉显微镜的直线压电作动器[J]. 光学精密工程,2013,21(6):1524-1530.
Design and analysis on 2-DOF precision micro-positioning stage for long stroke without coupling
XU Fang-chao,LU He,SUN Feng,DUAN Zhen-yun
(Department of Mechanical Engineering, Shenyang University of Technology, Shenyang 110870, China)
In order to satisfy the demand for long stroke micro-positioning stage, this paper proposes a piezo-driven 2-DOF precision micro-positioning stage for long stroke without coupling. The micro-positioning stage uses piezoelectric ceramics as driven element, and uses the diamond displacement amplification mechanism to amplify the output displacement. The stage can implement 2-DOF long stroke movements without coupling. This paper introduces the structure of micro-positioning stage, and analyze the working principle, the orthogonal analysis is used to study the structural parameters influencing on the displacement output of the diamond displacement amplification mechanism, finite element analysis is used to analyze the micro-positioning stage to calculate the output displacement, displacement magnification ratio, rigidity, natural frequency, harmonic response frequency and the maximum stress, and so on, all of parameters meet the use requirements.
micro-positioning stage;diamond displacement amplification;piezo actuator;long stroke
2016-01-20;
2016-03-14
国家自然科学基金(51105257,51310105025)及辽宁省高等学校杰出青年学者成长计划 (LQJ2014012),中国博士后科学基金(2015M571327),十二五国家科技支撑计划(2014BAF08B01)资助
徐方超(1979 -) ,男 ,辽宁沈阳人,汉族,日本高芝工科大学博士,沈阳工业大学讲师, 研究方向为压电驱动技术与装备。
陆鹤(1988-),男,辽宁鞍山人,汉族,硕士,沈阳工业大学。
TH112
A
1001-196X(2016)05-0056-05
猜你喜欢
小学生学习指导(中年级)(2022年9期)2022-09-30
成都信息工程大学学报(2021年3期)2021-11-22
陶瓷学报(2021年3期)2021-07-22
数学大王·低年级(2018年8期)2018-09-03
铜仁学院学报(2018年6期)2018-07-05
新高考·英语进阶(高二高三)(2016年4期)2016-09-19
小雪花·成长指南(2015年5期)2015-05-25
振动、测试与诊断(2014年6期)2014-03-01
振动、测试与诊断(2014年6期)2014-03-01
意林(2008年12期)2008-05-14
