ADS-B系统在城市防空雷达标校中的应用
2016-12-13 08:23董荣果赵宪涛
舰船电子对抗 2016年5期
董荣果,李 翔,赵宪涛
(中国船舶重工集团公司第723研究所,扬州 225001)
ADS-B系统在城市防空雷达标校中的应用
董荣果,李 翔,赵宪涛
(中国船舶重工集团公司第723研究所,扬州 225001)
城市防空雷达的标校工作很大程度上受到城市环境的限制,如塔标寻找、信标机架设及无人机飞行等等。分析得出基于ADS-B系统的标校可以避免这些条件的限制,且用试验证明了此标校方法的可行性。
城市防空雷达;标校;ADS-B;对比分析
0 引 言
城市防空雷达在第一时间准确地定位空中目标位置,是城市防空系统运作的第1步。也就是说,防空雷达是城市防空系统的“眼睛”,那么提高“眼睛”指示目标的准确度尤为重要。标校是雷达提高目标指示准确度重要的一步。
常规两坐标雷达的标校主要是距离和方位上的,目前标校方法有静态和动态2种。
静态标校是基于固定塔标(无源标校)或信标机(有源标校)的一种标校方式。在城市环境中,寻找合适的塔标或架设信标机的地点,通过差分全球定位系统(GPS)来计算相对于雷达的距离、方位值,然后对比雷达探测出的目标距离、方位值,计算出误差值并修正[1]。
动态标校则是基于无人机飞行数据的一种标校方式。通过差分GPS实时记录无人机飞行过程中的GPS数据,并换算为相对于雷达的距离、方位值,同时实时记录雷达对该无人机探测出的距离、方位值,2组数据拟合出曲线,分析出误差值并修正。
1 ADS-B系统及其标校应用方法
1.1 ADS-B系统简介
ADS-B是广播式自动相关监视技术的简称,是飞机与飞机、飞机与指挥塔实现双向沟通的重要渠道。其工作原理如图1所示。

图1 ADS-B系统工作原理
ADS-B信息包含飞机标识、飞机种类、飞机四维(高度、经度、纬度、时间)信息以及其他一些附加信息[2]。ADS-B信息获取的渠道有全球卫星导航系统(GNSS)、惯性导航系统(INS)、惯性参考系统(IRS)、其他机载传感器[3]。多通道的数据来源,使得ADS-B系统信息准确度高,实时性好。ADS-B系统最大广播距离可达400 km,而且城市中配备ADS-B系统的民航飞机较多,相对于无人机而言,民航飞机飞行高度较高,雷达反射面积大,易于发现。种种条件都为利用ADS-B系统对城市防空雷达进行标校提供了可能。
1.2 ADS-B系统用于城市防空雷达标校
首先要架设一台ADS-B信息接收器,在雷达附近空旷处接收来自民航飞机ADS-B信息,利用民航飞机ADS-B系统广播出的飞机GPS、高度信息以及雷达自身的GPS、高度信息,计算出飞机相对于雷达的距离和方位信息(真实值),与雷达探测出的该飞机距离、方位信息(测量值)进行比较,分析出误差值并修正。原理图如图2所示。
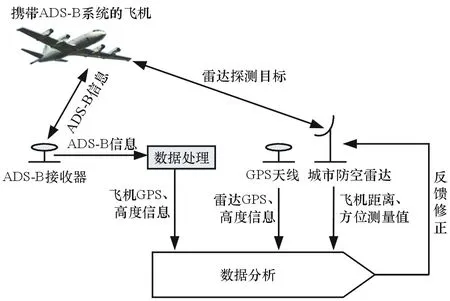
图2 ADS-B系统用于雷达标校原理图
在目标选取、数据利用、标校精度等几个方面对比分析4种方法在城市防空雷达标校中的应用,标校方法对比结果如表1所示。

表1 标校方法对比
对比发现,基于ADS-B系统的标校方法和静态有源标校方法比较适合城市防空雷达的标校工作;但是,静态有源标校中,信标机架设需要合适的位置及定点人员的远程配合,需要的人力物力较多,同时,信标机花费上较ADS-B系统稍高。由此可以看出,基于ADS-B系统的标校在城市防空雷达的标校中占有一定的优势,在标校后的验证工作中也较为简单易行。
1.3 基于ADS-B系统标校方法的数据处理
在此标校方法的数据处理方面,主要有两大步骤:
(1) 将民航飞机GPS值换算为相对于雷达的距离、方位值,作为真实值;
(2) 对比雷达探测出的该飞机距离、方位值,即测试值,分析误差并修正。
假设地球是半径为r的球体,任意一物体地理位置表示为(L,B,H),其中L为经度,B为纬度,H为海拔高度。则飞机位置信息可表示为(LF,BF,HF),雷达天线中心位置信息为(LR,BR,HR)。那么,以雷达为中心的空间直角坐标系中,飞机坐标位置可表示为:
(1)
由此计算出,飞机相对于雷达的距离为:
(2)
飞机相对于雷达的方位为:
(3)
根据上述公式,计算出飞机相对于雷达的距离、方位信息作为真实值[4]。由于ADS-B系统更新飞机数据的时间和雷达探测到飞机时的时间不一致,因此,在对比真实值和测试值时,需要利用同一时间源(例如格林威治时间)作为参考,分别绘制出真实值和测试值的“时间-距离”曲线和“时间-方位”曲线,在同一参考坐标下进行对比,从而得出误差值并加以修正。标校的结果也可以录取其他飞机航次进行验证。
1.4 ADS-B系统用于城市防空雷达标校精度分析
在雷达标校工作中,一般要求真实数据精度高于待标校雷达定位精度的3倍以上。城市防空雷达作为警戒雷达,其定位精度要求不会太高,距离精度要求在50 m左右,方位精度要求在0.5°左右。在标校过程中,差分GPS数据精度很高,距离上能精确到毫米级,方位精度也很高;ADS-B系统内经纬度误差约为0.000 1°,由此计算出来的距离误差小于10 m,方位误差小于0.05°,精度远远高于城市防空雷达定位精度。由此可以看出,ADS-B系统用于城市防空雷达的标校,其精度肯定能满足要求。
2 标校结果分析
在我国东北部某市进行了基于ADS-B系统对城市防空雷达的标校,现以录取的自东北方向进入、切向飞向西南方的一航班部分数据为例,对比真实值和测试值。
由图3可以看出,根据ADS-B数据计算出来的飞机距离、方位(真实值)曲线与雷达探测出飞机距离、方位(测试值)曲线有较好的拟合度,对于城市防空雷达的标校有很好的利用价值。

图3 真实值与测试值曲线对比
3 结束语
本文对比分析了多种雷达标校方法,指出了基于ADS-B系统的标校在城市防空雷达标校中的优势。虽然ADS-B系统的数据量较大,挑选合适数据并计算会延长一定的标校时间;但是相较于静态标校,此标校方法在不需要多处架设标校系统的情况下,能完成多距离、多方位的同步标校,相较于动态标校,则能节省较多的人力、物力。利用ADS-B系统对城市防空雷达进行标校具有很高的推广价值。
[1] 朱起悦.应用差分GPS技术进行雷达标校[J].电讯技术,2006(1):108-110.
[2] 张天平.ADS-B技术及其在空管中的发展与应用[J].电子产品世界,2009(6):34-37.
[3] 苑文亮.基于ADS-B数据的雷达标校新方法[J].舰船电子工程,2010(3):147-150.
[4] 朱华统.GPS坐标系统的变换[M].武汉:武汉测绘出版社,1994.
Application of ADS-B System to The Calibration of Air-defense Radar for City
DONG Rong-guo,LI Xiang,ZHAO Xian-tao
(The 723 Institute of CSIC,Yangzhou 225001,China)
The calibration of air-defense radar for city is limited by city environment in great degree,such as tower marker search,beacon setting and unmanned aerial vehicle (UAV) flight etc..This paper educes that the calibration based on ADS-B system can avoid those limitations through the analysis,and proves the feasibility of this calibration method through the experiment.
air-defense radar for city;calibration;ADS-B;comparison analysis
2016-07-13
TN957.51
A
CN32-1413(2016)05-0050-03
10.16426/j.cnki.jcdzdk.2016.05.012
猜你喜欢
军事文摘(2022年11期)2022-06-24
军事文摘(2022年11期)2022-06-24
小哥白尼(军事科学)(2022年2期)2022-05-25
幼儿园(2021年12期)2021-11-06
军民两用技术与产品(2021年10期)2021-03-16
电子制作(2019年15期)2019-08-27
航天电子对抗(2019年4期)2019-06-02
小学生学习指导(低年级)(2018年12期)2018-12-29
小学生时代·大嘴英语(2015年7期)2015-11-23
百科探秘·航空航天(2015年4期)2015-11-07