
田园管理机远程控制系统总体方案设计*
2016-12-12 00:41蒋易强赵
广西职业技术学院学报 2016年5期
蒋易强赵 勇
(1.乐山职业技术学院,四川 乐山,614000;2.四川大学制造科学与工程学院,四川 成都,610065)
田园管理机远程控制系统总体方案设计*
蒋易强1,2赵 勇1
(1.乐山职业技术学院,四川 乐山,614000;2.四川大学制造科学与工程学院,四川 成都,610065)
传统田园管理机采取操作者跟在机器后面行走、直接扶持把手进行功能控制的方式。此种作业方式极易造成事故,劳动强度较大。远距离控制田园管理机对确保操作人员安全、降低劳动强度、克服农村青壮劳力短缺有非常重要的意义。该文主要从控制系统功能分析、总体设计方案、控制方案设计等三方面设计田园管理机远程控制系统,为后期的硬件设计、软件设计奠定基础。
远程控制;田园管理机;方案设计
丘陵和山区的耕地面积在我国占很大比例,尤其是在西南地区。这些耕地具有地块小、形状不规则、较为分散等特点,因此经营模式以家庭经营为主。为了适应此种经营模式,种植户一般采用小型农业机械,其中田园管理机使用最为普遍。田园管理机即微型耕耘机,简称“微耕机”,又叫“耕耘机”。传统田园管理机在其作业过程中采取操作者跟在机器后面行走、直接扶持把手进行控制的方式。因此,常有学者调侃“农耕机解放了牛,累死了人”,而且这种作业方式极易造成农机事故。因此,研究远距离控制田园管理机对确保操作人员安全、降低作业劳动强度、克服农村青壮劳力短缺有非常重要的意义。
我国农业机械工业起步较晚,新中国成立以后才逐步兴起。而智能农业机械的发展则更晚,上世纪90年代才逐渐起步。胡炼等人以久保田公司生产的插秧机作为研究基础平台,对其机械部分进行改进设计,主要包括转向机构、变速器机构及插秧机构等[1],然后又设计了智能插秧机的单片机控制系统总体方案,并采用PID控制算法来控制带双阈值死区的电机位置,进而控制插秧机的左右转向,在转向层面上实现了插秧机智能控制。许洪斌等[2]针对某型号田间搬运机采取拉线控制方式,设计了远程控制系统。该控制系统主要完成搬运机的起动、停止、转向、油门调节等功能控制。为了满足山地履带式微型耕作拖拉机的作业安全性、便捷性等需要,何金伊[3]设计了一套基于AT89S51单片机装置的遥控系统。为实现机滚船无人驾驶,降低劳动强度,蒋蘋在不改变现有的机滚船机械结构的基础上,设计了一套机滚船的遥控驾驶系统[4]。
国外的智能农业机械技术优势突出。智能农机的无人驾驶系统技术主要基于GPS定位、机器人视觉系统、自动感知、自动巡航、自动操作的基础上发展起来的,并逐步形成了3S技术体系。国外农业机械无人驾驶技术研究遥遥领先于国内,如日本岩手大学将无人驾驶技术运用于拖拉机,John Deere公司研制出无人驾驶拖拉机和无人驾驶收割机[5]。美国Illinois大学将各种各样相机、超声波、GPS定位、各种传感器信息进行融合,并运用这些信息对农业机械进行无人驾驶技术研究[6]。英国Silsoe研究所的Tillett,Marchant和Hague开发出基于机器视觉的自动定位导航系统,并把该系统运用于锄草拖拉机。
目前,关于远程控制田园管理机的研究报道较少。丁向美等开发了基于ARM的远程控制系统,改进设计了微耕机的机械结构,通过软、硬件相结合的方式,实现远程控制微耕机[7]。张季琴等设计了山地微型遥控耕地机的遥控系统并对整机主要工作部件的结构进行设计[8]。但是上述控制系统也存在一些不足,如设计功能过于复杂。如果远程控制田园管理机控制系统采用GPS等定位系统、机器视觉系统、自动巡航、自动驾驶系统,就会造成小型农业机械成本大幅提高,难以适应家庭经营模式。
随着电子、通信技术不断发展,电子产品、通信设备正向着能耗低、体积小、重量轻、性能优等方向发展,而且价格也越来越低,为其运用于小型农业机械奠定了技术、经济基础。由于农村青壮年劳动力短缺,信息化、智能化小型农业机械需求越来越旺盛。因此,越来越多的小型通信设备、电子产品将被用于微型农业机械。智能微型农业机械作为新兴农业科技在今后的发展中大有可为,是未来微型农业机械发展的主要方向。
1 控制系统功能分析
远程控制田园管理机的控制系统首先应具备准确传输控制信号的功能,操作者的控制意图信息能够被传输到田园管理机;田园管理机的状态信号能够被传输到控制器,能够被操作者掌握。其次要能够解析操作者按键信息,分析信息传输协议。最后,控制系统还必须能够通过软件控制相应驱动电路,进而控制田园管理机的机械结构,最终实现田园管理机的各项功能。
远程控制田园管理机的控制系统主要由以下三部分组成:发射控制模块、接收控制模块和执行模块。控制系统功能模块之间的关系如图1所示。信号发射控制模块主要是手持式遥控器。该模块由如下三部分组成:按键组合电路、数据编码电路、无线发射电路。发射控制模块由按键组合电路实现,进行数据编码,最后由无线发射电路发送控制信号。该信号通过无线传输网络传递给信号接收控制模块。接收控制模块由以下三部分组成:无线接收电路、控制单元电路、继电器电路。无线接收电路接收到控制信号后进行编码,传输给控制单元进行处理、发出指令给继电器电路。继电器电路控制执行模块,执行模块主要由执行装置和电机构成,直接实现田园管理机各功能操作。

图1 田园管理机远程控制系统功能模块
远程控制田园管理机需实现的主要功能如下:
(1)起动、关闭田园管理机的发动机;
(2)选择作业功能:停车、左转向、右转向、前进速度I、前进速度II、增大速度、减小速度等;
(3)实时显示田园管理机的工作状态,主要是指是否正常工作及其当前的工作状态;
(4)自动进行系统初始化功能。
根据以上功能要求,控制系统总体设计方案如下。
2 控制系统总体方案设计
远程控制田园管理机系统是由操作者、机械系统、控制系统和通信系统构成的一个复杂系统。远程控制田园管理机的行驶环境和运行状态信息分别由人和相应传感器获取,经无线通信系统传输到田园管理机平台上的控制系统,控制系统通过继电器、电机等设备控制机械系统。远程控制人员根据这些信息,通过操作手持式遥控器生成并发送各遥控驾驶指令,再以微波无线通信的方式传送给远程控制田园管理机,田园管理机按遥控指令的要求行驶,完成各项功能。
远程控制田园管理机控制系统总体设计方案如图2所示。操作人员可以通过手持式遥控器向远程控制田园管理机接收装置发射控制信号,实现遥控驾驶田园管理机。在遥控指令控制下田园管理机能顺利完成发动机的启动、熄火,加速、减速、换挡、转向、停车等功能。在行驶方向偏离正确方向时,遥控人员发送控制指令进行方向调整;远程控制田园管理机可在操作人员以远程控制方式下进行遥控作业。
远程控制田园管理机的工作流程为:操作者通过遥控器发送遥控指令,遥控接收器接收遥控指令,将信号交给单片机进行分析处理,同时档位传感器感知田园管理机的当前状态,中央处理单元将当前状态与遥控信号进行比较产生控制信号,然后将控制信号传送到继电器,进而控制步进电机。执行机构在电机带动下完成田园管理机离合、换挡、转向调节等动作。

图2 远程控制田园管理机控制系统总体方案设计
3 控制系统的软件控制策略
远程控制田园管理机的控制策略实质就是控制系统的软件设计方案。控制系统的软件设计主要是对单片机的程序设计。为了便于设计及调试,远程控制田园管理机的控制系统运用模块化设计方法,主要包括主程序以及各功能子程序等。
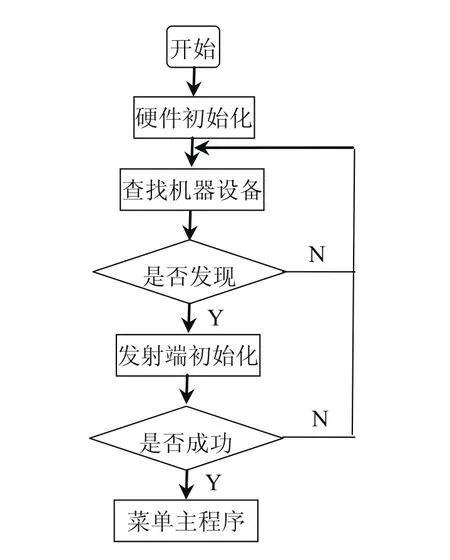
图3 系统初始化程序流程框图
控制系统的主程序是系统程序的总程序,主要用来完成系统的软件、各种传感器等硬件条件的初始化。控制系统的主程序的初始化流程如图3所示,主要是循环结构。控制系统在田园管理机在带电状态下首先进行系统初始化设置。初始化分为两个步骤,第一步是对整个系统的硬件进行检测,查找田园管理机设备及其传感器是否存在;若没有检测到,则立即退出,并通过LED灯或蜂鸣报警。若发现田园管理机及其传感器信号,立即请求初始化数据,再对发射单元进行进一步地初始化。
在两个初始化步骤完成之后,主菜单程序调用各功能子程序实现不同功能控制。主程序在完成田园管理机初始化、端口、中断设置之后,调用各功能子程序。功能子程序对接收到的编制信号进行处理,并产生对继电器进行控制的信号,信号控制电机,进而控制机械系统。
功能模块子程序主要包括转向控制子程序、发动机油门控制子程序、发动机起或停子程序。手持式遥控器10个按键对应功能为发动机起动、关闭、油门加大、油门减小以及田园管理机的左转向、右转向、速度I、速度II、停车、空档等功能。
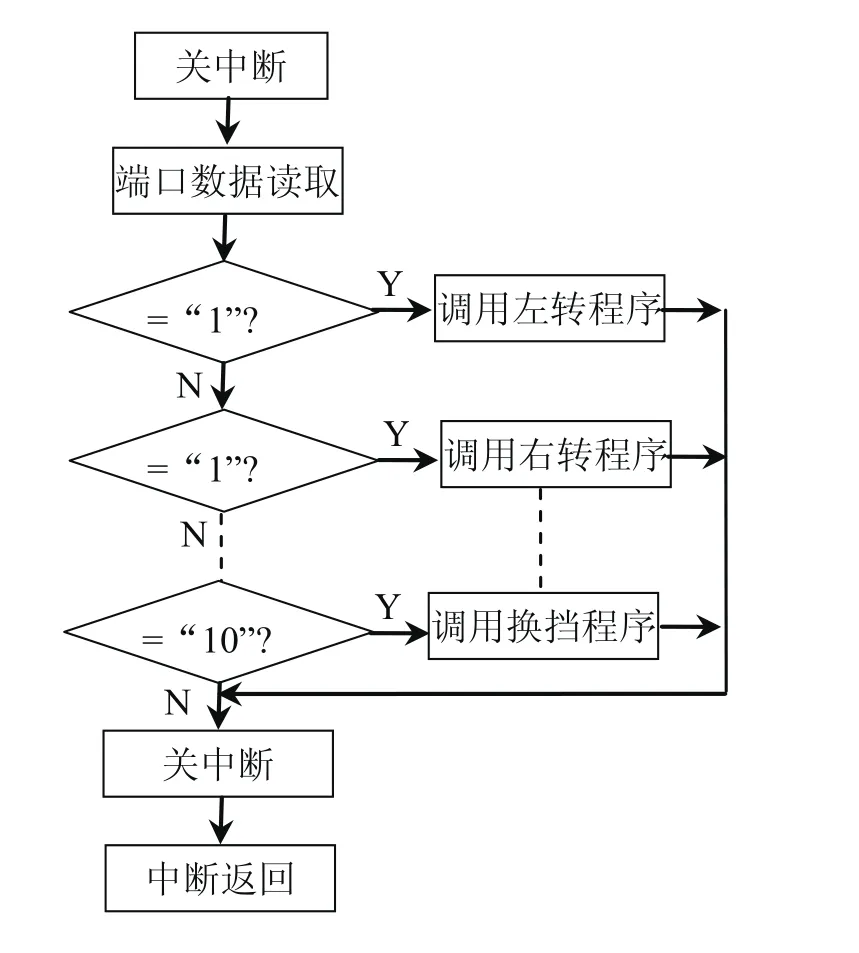
图4 中断子程序流程图
4 结束语
田园管理机远程控制系统的设计主要从控制系统功能分析、控制系统总体设计方案、系统的控制策略设计等三方面进行展开。远程控制田园管理机控制系统主要由三个功能模块组成:发射控制模块、接收控制模块和执行模块。控制系统总体设计方案主要包括在遥控指令控制下田园管理机能顺利完成发动机的启动、起步、加速、换档、减速、转向、停车、熄火等功能。远程控制田园管理机的控制系统设计采用模块化设计方法,包括主程序、中断子程序等部分。通过对以上内容分析,为远程控制田园管理机的硬件设计、软件设计奠定基础。
[1]胡炼,罗锡文,赵祚喜,张智刚,胡均万,陈斌.插秧机电控操作机构和控制算法设计[J].农业工程学报,2009(4):118-122.
[2]许洪斌,王智强,杨长辉. 丘陵山地小型田间搬运机遥控系统设计[J]. 江苏农业科学,2016(4):398-400.
[3]何金伊,杨福增,徐秀栋. 山地履带式遥控微耕机控制系统设计[J]. 拖拉机与农用运输车,2011(2):19-22.
[4]蒋蘋,胡文武,罗亚辉,谢方平,孙松林. 机滚船遥控驾驶系统设计[J]. 农业工程学报,2009(6):120-124.
[5]Ramalingam N, TSStombaugh. DGPSBased Automatic Vehicle Guidance[C].Annual International Meeting, Midwest Express Cent er,Milwaukee,Wisconsin,2000.
[6]Zhang Q., J.A Reid, and D.Wu,. Hardware-in-the-loop simulator of an off road vehicle electrohydraulic steering system[J].Transactions of the ASAE, 2000,43(6):1323-1330.
[7]丁向美.基于ARM的微耕机远程控制系统的研究[D].西南大学,2011.
[8]张季琴,杨福增,刘恒培,刘世,卢毅. 山地微型遥控耕地机的设计与试验[A]. 中国农业工程学会(CSAE).中国农业工程学会2011年学术年会论文集[C].中国农业工程学会(CSAE),2011:6.
An Overall Design of Remote Control System for Rural Management Machines
JIANG Yi-qiang1,2, ZHAO Yong1
(1. Leshan Vocational & Technical College, Leshan, Sichuan 614000 2. School of Manufacturing Science and Engineering, Sichuan University, Chengdu, Sichuan 610065)
Traditional rural management machines are usually operated by their operators through handling the hands of the machines directly while walking behind them. Such operations are highly prone to cause accidents and intensify the labor. Hence a remote control for rural management machines has a great significance for ensuring the security of the operators, reducing the intensity of the labor and overcoming the shortages of rural youth Labors. This paper proposes an overall design of remote control system for rural management machines from the aspects of functional analyses, design schemes and control schemes, Which will provide a basis for the late designs of the hardware and software of the machines.
remote control; rural management machines; scheme design
S219.2
A
1674-3083(2016)05-0001-04
2016-10-20
四川省乐山市新产品试制鉴定项目:远程控制田园管理机的研制(14NZD154)。
蒋易强(1976—),男,四川安岳人,博士,副教授,研究方向:计算机仿真研究。
猜你喜欢
小学生优秀作文(低年级)(2021年11期)2021-12-06
今日农业(2020年14期)2020-08-14
语文世界(小学版)(2019年2期)2019-02-24
小天使·一年级语数英综合(2016年7期)2016-05-14
数学大王·低年级(2016年6期)2016-05-14
中国科技纵横(2015年2期)2015-11-05
科学中国人(2014年16期)2014-11-20
小天使·一年级语数英综合(2014年7期)2014-06-26
中国新技术新产品(2014年3期)2014-03-24
环球时报(2012-03-28)2012-03-28
