
基于AT89C52的智能投递车设计
2016-12-09 08:47吴青鸿杨莹汪润鸿熊幸娄锐
湖南文理学院学报(自然科学版) 2016年4期
吴青鸿, 杨莹, 汪润鸿, 熊幸, 娄锐
基于AT89C52的智能投递车设计
吴青鸿, 杨莹, 汪润鸿, 熊幸, 娄锐
(湖南文理学院机械工程学院, 湖南常德, 415000)
为了解决快递投送过程中对人力的过度依赖, 选用AT89C52单片机作为控制器、红外管作为对接识别传感器、蜗轮蜗杆自锁电机作为驱动、齿轮与齿条作为主要传动方式, 实现了对快递储件柜(云柜)的自动化装卸, 减轻了快递人员的劳动强度, 避免了快递分发过程中的乱堆乱放行为。
单片机; 红外线传感器; 快递; 智能
中国快递规模居世界第一位[1]。快递需求主要集中在网络零售和商务件, 其中网络零售件占六到七成, 这对快递的投递提出了更高的要求, 由此产生很多问题: (1) 快递公司在小区或者校园外“摆摊”的现象尤为严重, 影响了人们的生活; (2) 快递的装卸都是依靠人力, 工作效率低、劳动强度大, 节假日会出现用工荒。目前, 国内外对智能运载车进行了大量的研究, 如张柏等[2]对智能物料运载车的发展进行了研究。美国Basrrett电子公司在1953年开发了世界上第一台自主导航车, 可以在杂货仓库沿着布置的空中导航线运输货物[3]。
本文针对上述问题, 提出了一款智能投递车设计。该投递车主要实现对储件柜(云柜)的自动化装卸,不但可以降低快递人员的劳动强度, 而且可以提高投递的效率。
1 投递车功能原理
智能投递车是基于五十铃单排厢式货车[4]为原型进行的改进。为了方便加工和制造, 采用5︰1缩小模型。其主要参数: 储件柜规格为400 mm × 200 mm; 底板高度为340 mm; 平台尺寸为400 mm × 200 mm; 齿条长度为500 mm; 电机转速为11 r/min; 红外传感器检测范围为0~100 mm; 平台移动距离为100 mm。
图1为智能投递车三维图。该智能投递车由4大部分组成: (1) 升降部分, 通过安装在车体底板的一对蜗轮蜗杆减速电机上的齿轮与齿条啮合, 使电机的旋转运动转换为齿条的竖直升降运动。通过连接板连接齿条和导向杆上的滑块, 限制了5个自由度, 保证升降过程的准确性以及实现储件柜的自动装卸; (2) 平移部分, 由固定在车体底板的2个蜗轮蜗杆减速电机(在实际运用中, 可根据车辆运送储件柜的个数适当调整电机个数)和升降平台上的1个蜗轮蜗杆减速电机上的齿轮旋转带动安装在储件柜底板上的齿条水平运动, 通过控制器分别控制各个电机状态, 完成储件柜在升降平台和车体底板之间的水平移动; (3) 对接部分, 由T型槽滑动平台和T型丝杠贯通式电机组成的自动对接平台, 通过2个红外传感器判断偏移方向和是否对准, 利用控制贯通式电机旋转带动平台移动, 完成平台与投递点铺设的轨道对接; (4) 翻转部分, 利用1对步进电机为动力输出[5–6], 通过控制器输出一定数量的脉冲控制平台翻转90°, 完成对平台的收放功能, 保证投递车在行驶过程中的安全性。
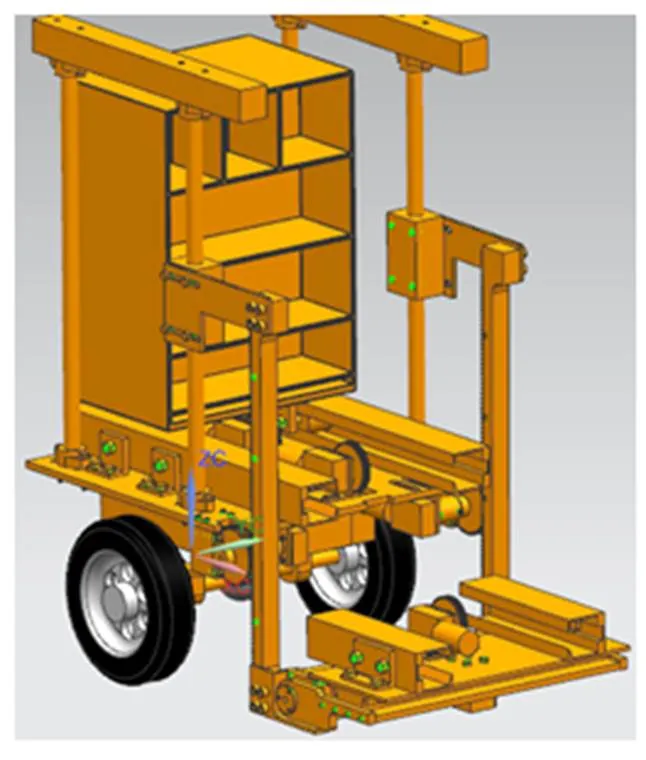
图1 投递车三维图
2 控制模块
选用AT89C52单片机作为控制核心[7–8], 其自带中断产生控制脉冲, 使用专用的电机驱动器完成对电机的控制, 通过各路传感器的状态自动判断动作指令执行装卸步骤, 以实现自动装卸的过程。同时为保证控制系统的控制方便和稳定性, 采用红外遥控[9]以及物理按键双模式控制, 保证对小车的准确控制。装货流程如图2所示。
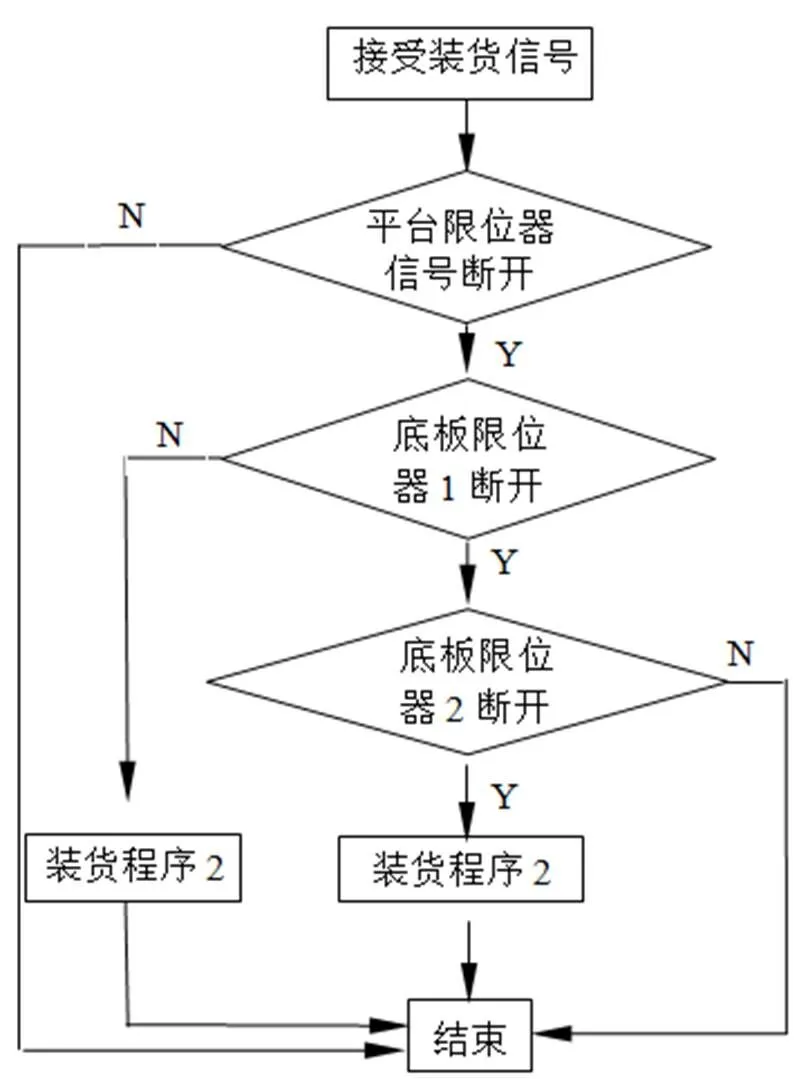
图2 装货流程图
如图3所示, 通过2个红外传感器的状态判断平台与导轨的偏差, 等待对准指令[10]。当对准指令发出, P0.0、P0.2产生相应控制脉冲控制直到红外传感器判断为对准状态。当单片机接收到回中信号后, 把方向信号取反产生控制脉冲, 直到对中限位器状态改变为止。
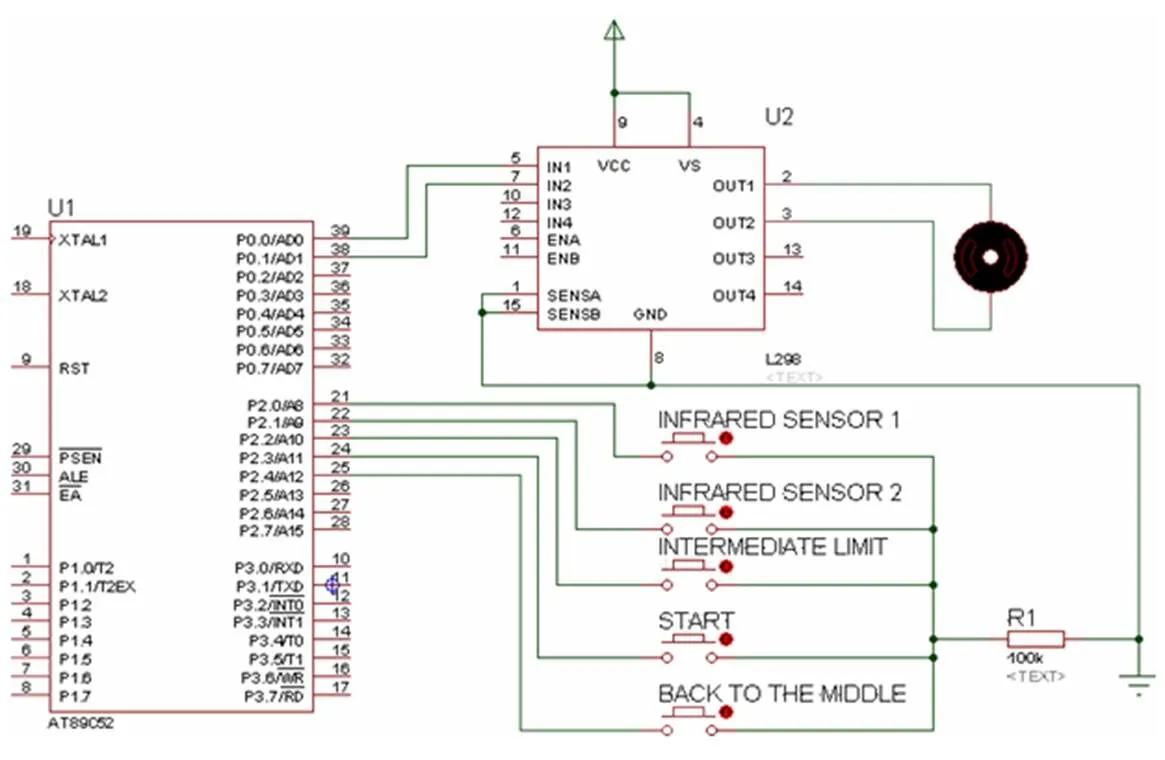
图3 投递车对接电路仿真图
智能投递车升降平移电路仿真如图4所示。系统通过各个限位器的状态, 自动判断装卸货指令应该执行的动作。以装货过程为例, 如果所有限位器均断开, 则执行将储件柜运输到底板的动作。首先平台电机旋转将储件柜装到平台上, 通过平台上的平台限位器判断储件柜是否准确到位, 然后平台电机停止运行, 启动升降电机。通过装在导杆上的升降上限位器判断平台是否到达与底板相同的高度, 升降电机停止, 之后平台电机、底板电机1、底板电机2依次启动, 当底板限位器2闭合, 电机停止旋转, 装货过程完成。
投递车翻转电路仿真如图5所示。当AT89C52单片机控制器接收到翻转指令, 将发出一定数量的脉冲信号, 使步进电机转过预定的角度, 达到平台安全收放的目的。
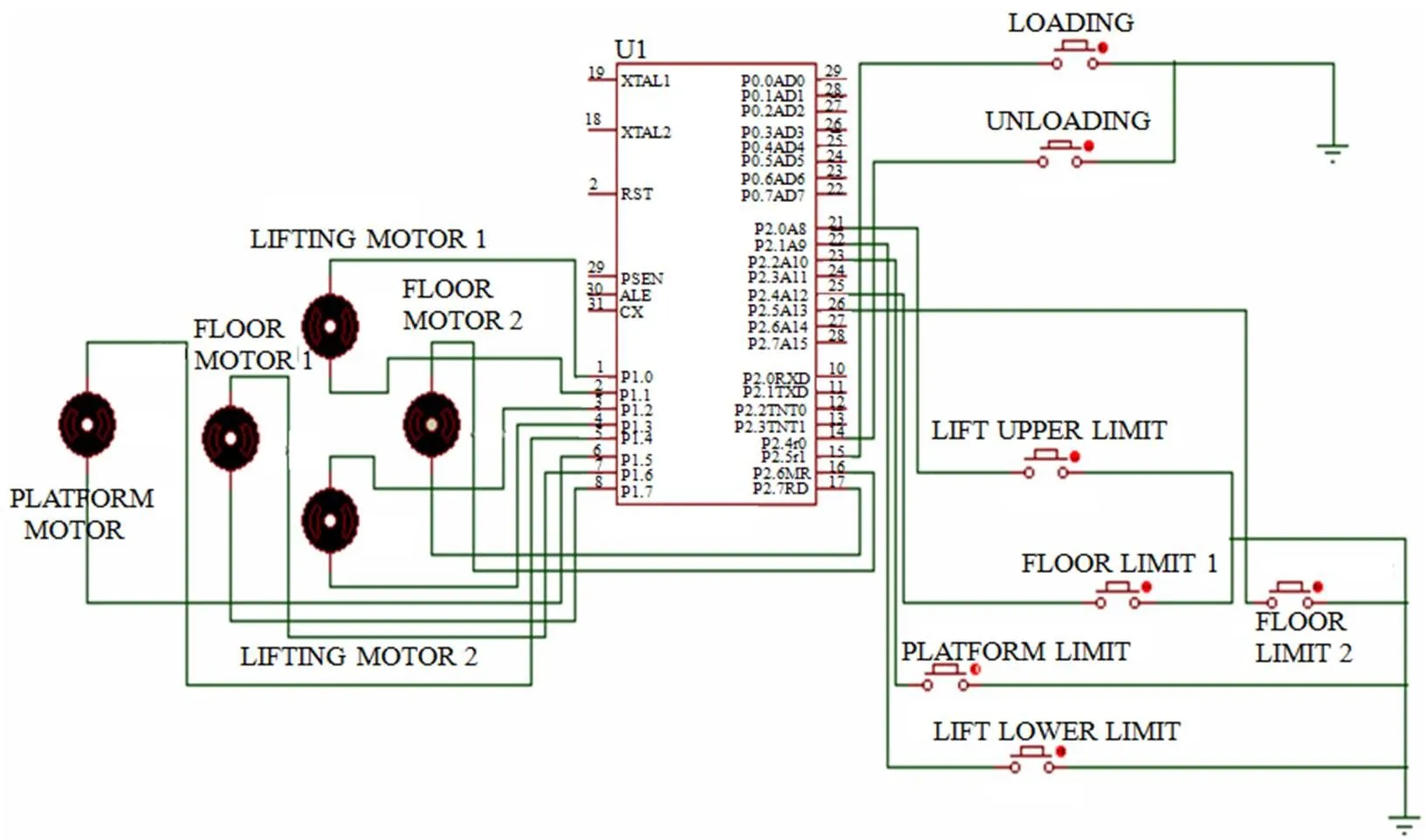
图4 投递车升降平移电路仿真图

图5 投递车翻转电路仿真图
3 结论
智能投递车以AT89C52单片机为核心控制器,能够高效准确地实现整个装卸过程的自动化, 以及卸货过程中平台导轨与地面导轨自动对接过程及平台的收放。该智能投递车实现对集装箱式储件柜的自动装卸, 减轻了投递员的劳动强度。
[1] 庞彪. 我国快递市场规模跃居世界第一[J]. 中国物流与采购, 2015(3): 50–51.
[2] 张柏, 张兴国, 郭旭, 等. 车间智能物料运载车的发展综述[J]. 科技资讯, 2015(26): 237238.
[3] 张辰贝西, 黄志球. 自动导航车(AGV)发展综述[J]. 中国制造业信息化, 2010, 39(1): 53–56.
[4] 石磊. 9 600 mm厢6 × 2厢式快递车在快递行业中的应用现状及未来发展趋势分析[J]. 企业科技与发展, 2014(5): 67–69.
[5] 郭杰荣, 李方钊. 基于DSP的无刷直流电动机PWM控制系统[J]. 湖南文理学院学报(自然科学版), 2014, 26(2): 6768.
[6] 李志华. 基于步进电机多轴联动控制系统设计与实现[J]. 湖南文理学院学报(自然科学版), 2014, 26(3): 6771.
[7] 周熊. 基于AT89C52单片机的烟雾报警器设计[J]. 电子设计工程, 2013, 21(1): 164165, 169.
[8] 张洁, 刘苹, 卢慧. 基于单片机AT89C52的多功能探测小车设计[J]. 电子测量技术, 2014, 37(8): 86–88.
[9] 彭建英, 潘雄文, 曾志刚. 一款新型智能红外遥控系统的设计[J]. 湖南文理学院学报(自然科学版), 2014, 26(2): 7980.
[10] 黄莺. 基于Android系统控制的多功能小车系统设计[J]. 河池学院学报, 2015, 35(5): 90–97.
(责任编校:刘刚毅)
A intelligent delivery vehicle design based on AT89C52
Wu Qinghong, Yang Ying, Wang Runhong, Xiong Xing, Lou Rui
(Department of Mechanical Engineering, Hunan University of Arts and Science, Changde 415000, China)
ly: for solving over-dependency on the couriers during the transport of express, the AT89C52 single chip was chosen as the controller and infrared sensor as the recognition sensor and a worm-and-gear self-lock motor as the source power and gear-rack as the important transmission and the intelligent stevedoring was achieved for storage cabinet of express (a popular storage system also known as Cloud cabinet). In addition, it reduces the labor intensity of express staff, puts an end to the courier distribution in the process of huddle misplacing behavior.
single chip; infrared sensor; express; intelligence
10.3969/j.issn.1672–6146.2016.04.009
TH 193.5
1672–6146(2016)04–0040–03
杨莹, 19305513@qq.com; 吴青鸿, 862636338@qq.com。
2016–07–05
湖南省教育厅项目(12C0819); 湖南文理学院教改项目(JGYB1438)。
猜你喜欢
汽车零部件(2022年7期)2022-08-03
汽车零部件(2021年2期)2021-03-05
汽车实用技术(2020年12期)2020-10-21
铁道通信信号(2020年12期)2020-03-29
水运工程(2020年2期)2020-02-26
物流技术与应用(2019年6期)2019-07-16
电子制作(2018年19期)2018-11-14
电子制作(2017年19期)2017-02-02
广西科技大学学报(2016年4期)2016-11-21
电子制作(2016年19期)2016-08-24
