
虚拟仿真无人驾驶汽车跨学科实验平台的构建
2016-12-05 10:07姜显扬唐向宏
实验技术与管理 2016年11期
姜显扬, 唐向宏
(杭州电子科技大学 通信工程学院, 浙江 杭州 310018)
虚拟仿真无人驾驶汽车跨学科实验平台的构建
姜显扬, 唐向宏
(杭州电子科技大学 通信工程学院, 浙江 杭州 310018)
采用虚拟仿真技术构建了“无人驾驶汽车防撞预警技术”教学与研发用跨学科实验平台,利用Simulink和CarSim联合完成平台的构建,进行了汽车防撞预警模糊控制逻辑算法的设计和验证。该平台的建设与传统的实验室建设方法相比,具有成本低、建设周期短、趣味性和创新性强、更能够满足知识快速更新的需要等优势,大大减少了实验平台的建设成本和风险,并实现绿色建设实验室的理念。
虚拟仿真; 无人驾驶汽车; 实验教学; 跨学科实验平台
随着现代科学技术向纵深发展,高校理工科教学与科研工作常常出现跨学科融合的情况,迫切要求实验中心能够快速、经济地建立跨学科的实验研发与教学平台[1]。但是,直接建立硬件实物跨学科实验平台将面临经费等多方面困难。采用虚拟仿真技术[2-9]构建科研与教学跨学科实验平台,具有传统的实验室建设方法无可比拟的优势。杭州电子科技大学通信工程学院实验中心在教学和科研实践中,构建了无人驾驶汽车与电子通信专业学科交叉的跨学科实验平台,促进了教学科研的开展。
1 无人驾驶汽车技术与电子通信技术的结合
无人驾驶汽车是近几年国内外加紧研发的国际前沿技术,国内有许多相关企业通过与高校、科研单位的合作,在无人驾驶汽车前沿技术的研发方面实现资源整合、优势互补。
汽车是机电技术相结合的产物,而无人驾驶汽车对信号采集与处理、信息传输交换和防撞预警算法等技术有更高的要求,汽车生产企业的研发人员迫切需要得到高校电子通信学科的专业人员的技术支持;而高校为完成无人驾驶汽车科研项目,也迫切需要快速、经济地构建汽车项目的研发和实验平台。
无人驾驶汽车与电子通信专业的学科交叉,既是对通信学院现有实验条件的考验,又是一个促进本校科研与教学发展和进步的契机。由于杭州电子科技大学通信工程学院实验中心现有的实验室条件远不能涵盖汽车专业的跨学科教学、科研的需要,于是采用虚拟仿真技术构建跨学科实验平台,圆满解决了这一难题。
2 虚拟仿真技术跨学科实验平台的构建
传统的电子通信专业的虚拟仿真实验是基于OrCAD、PSPICE、PCAD、Altium Designer、Mutisim、Proteus、LabVIEW、LabWindows、CVI、Matlab/Simulink、ISE等软件构建的,而当面对无人驾驶汽车技术的跨学科应用时,这些实验手段几乎无用武之地。
汽车专业的仿真软件主要有AutoForm、DynaForm、Star-CCM、GT-SUITE、AVL-Fire、CarSim、TruckSim、BikeSim、ADV ISOR、SimulationX、TESIS DYNAware、AUTOSEA、ADAMS、veDYNA 、AMESIM、LS-Dyna等。这些软件往往不为电子通信专业的师生所熟悉。
鉴于Matlab/Simulink仿真软件涵盖的学科范围非常广泛,不仅在电子、电工、信息、通信、自动控制、计算机等领域,而且在汽车、土木工程、数理、金融、医学等很多学科、工程领域也有广泛深入的应用。实验中心根据校企合作项目需求,经过深入调查论证,制订了以Matlab/Simulink仿真软件为核心,整合电子通信专业仿真软件OrCAD、PSPICE、Altium Designer、Proteus和汽车专业仿真软件CarSim构建联合仿真实验平台的方案。Matlab/Simulink既有针对汽车仿真软件CarSim的接口,可以互相交换仿真数据,也有针对电子通信软件的接口,可以互相交换仿真数据。Matlab/Simulink仿真软件起到了一个桥梁的作用,在汽车仿真软件和电子通信仿真软件之间交换仿真数据,实现互联互通(见图1)。

图1 跨学科联合仿真实验平台
电路设计、嵌入式软件仿真通过专业仿真软件OrCAD、PSPICE、Altium Designer、Proteus等完成;信号处理算法通过Matlab/Simulink仿真软件进行验证,并与电路仿真软件对照分析;汽车动力学行为通过
CarSim仿真软件模拟,并与Matlab/Simulink仿真软件中的信号处理算法通过接口相连接。该仿真实验平台的构建方案完全以虚拟环境的方式建立控制电路与无人驾驶汽车之间的连接,可以编写、分析、验证、修改核心信号处理算法,并设计、验证、分析、修改电子电路硬件与嵌入式软件,平台搭建方便快捷,建设成本低廉,实验实现方便有效,充分满足了校企合作项目研发和大学生创新竞赛的需要。
CarSim 是一款汽车整车动力学仿真软件,模型准确、建模快速、易于修改,驾驶员操纵转向、刹车、油门等操作行为变量和路面、风向等行车环境变量,均能实时地反映到车辆模型的动态响应之中,其输出的状态量也非常丰富,输出数据以动画、曲线、表格等多种形式显示,以供研究分析。
以Matlab/Simulink仿真软件为核心,联合CarSim建模进行仿真实验,可以设置一些实物实验中很难实现的高成本或极端危险的工况和行车条件,并对整车系统与环境因素进行多角度、全方位的仿真实验研究。
3 无人驾驶汽车防撞预警虚拟仿真实验
以校企合作项目“无人驾驶汽车防撞预警技术”为例,采用模糊控制逻辑实现防撞预警的判定,并以跨学科联合仿真平台作为项目研发的实验手段。
首先,通过Simulink和CarSim联合仿真实验来完成汽车防撞预警模糊控制逻辑算法的设计和验证。
CarSim提供联合仿真所需的汽车动力学模型,该模型能够反映汽车各种运动学和动力学特性,并实时模拟车辆的行驶过程,然后输出信号参量提供给Simulink仿真软件,包括车辆的自车位置S、纵向速度V、发动机转速ωe、加速度a等信息。
在Simulink中建立加速制动切换逻辑模型、加速控制模型、制动控制模型和模糊控制模型。其中,制动控制模型如图2所示,模糊控制部分的模型如图3所示。

图2 Simulink构建制动控制模块模型
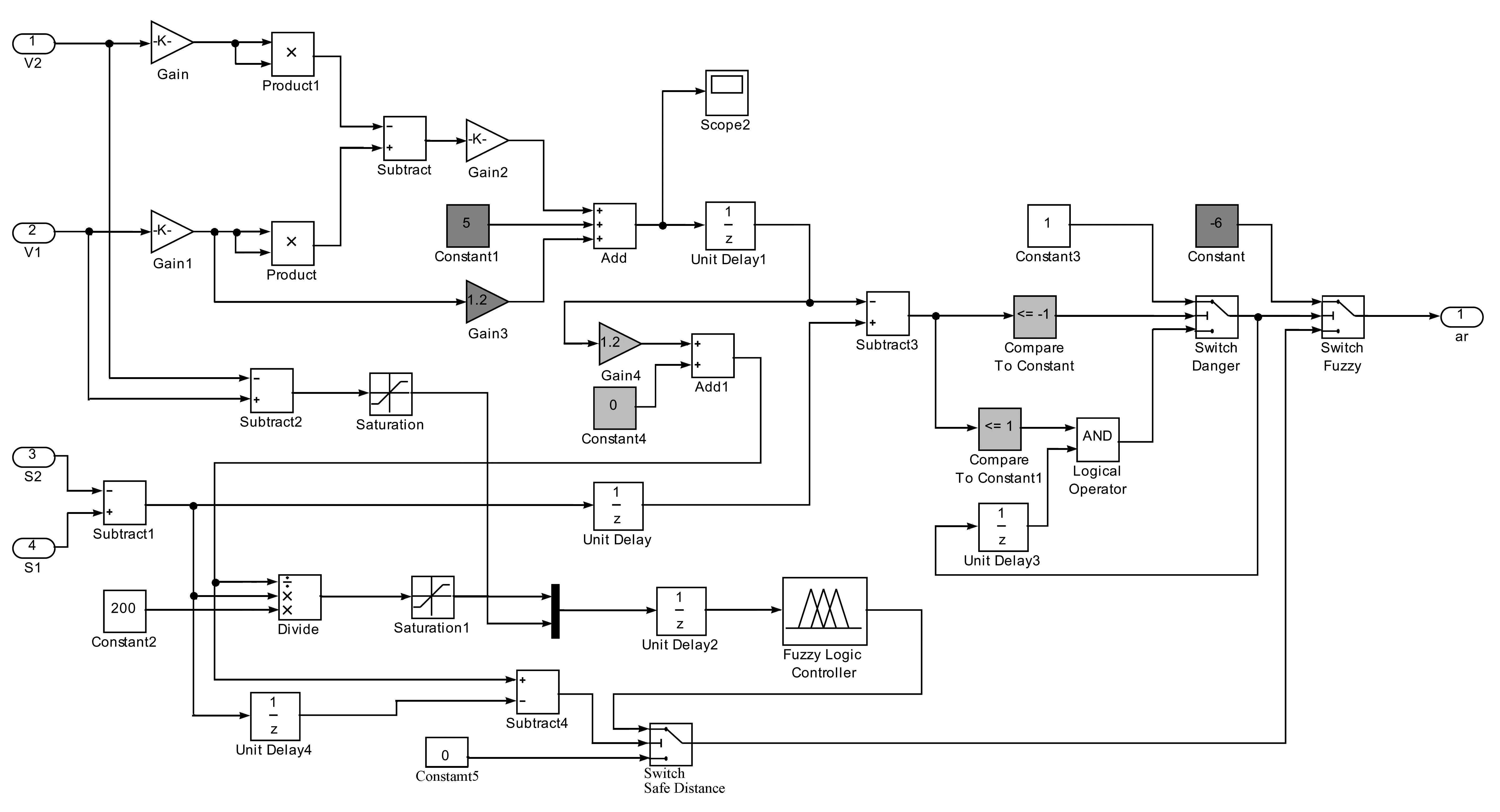
图3 模糊控制逻辑模块图
将在Simulink仿真软件中建立的实验模型和在CarSim仿真软件中建立的动力学模型相连接,组成一个以期望加速度为输入,以车辆速度、车辆位移为输出的闭合的仿真系统,如图4所示。
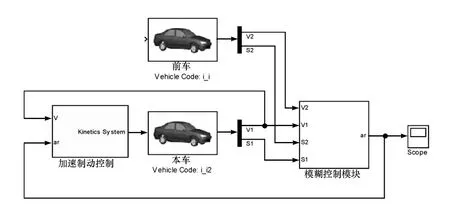
图4 CarSim与Simulink联合仿真模型图
在图4中,前车(编码“i_i”)和本车(编码“i_i2”)在CarSim仿真软件中设置各项环境条件和车辆动力学参数,输出车辆速度参数V1、V2和车辆位置参数S1、S2给Simulink之中的模糊控制逻辑模块。模糊控制逻辑根据算法运算得到本车期望加速度参数并输出给加速制动控制模块,包括加速制动切换逻辑模块、加速控制模块和制动控制模块。然后,加速控制模块和制动控制模块分别输出油门量或刹车量给本车,用于控制本车与前车之间的安全车距。
根据两车距离和相对速度大小的不同组合,设置了4种有代表性的仿真工况:
(1) 大间距高速接近:两车间距500 m,前车初速度80 km/h并以1 MPa压力刹车,后车初速度120 km/h,仿真时长30 s;
(2) 大间距低速接近:两车间距500 m;前车初速度80 km/h,无刹车,后车初速度120 km/h,仿真时长30 s;
(3) 小间距高速接近:两车间距100 m,前车初速度80 km/h并以1 MPa压力刹车,后车初速度120 km/h,仿真时长30 s;
(4) 小间距低速接近:两车间距100 m;前车初速度80 km/h,无刹车,后车初速度120 km/h,仿真时长30 s。
仿真结果如图5所示。图中,横坐标是仿真时间t,即车辆运行时间;纵坐标是车辆的位置坐标,前车与后车在道路上的间距s可以从中相减得出。从图5可以看出,在4种工况下模糊控制算法均能有效保持后车与前车的安全距离,从而达到防撞预警并自动制动的目的。仿真结果表明,跨学科实验平台是有效的。
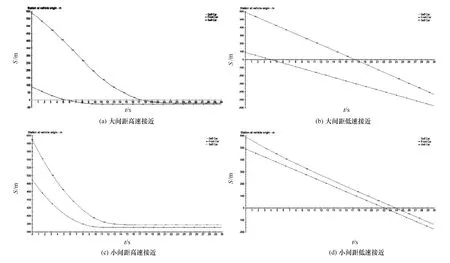
图5 不同仿真工况下前车与后车的车间距离变化图
另外,防撞预警控制电路硬件和嵌入式软件的设计仿真,是在Matlab/Simulink验证了模糊控制逻辑模块的算法之后,进一步通过专业仿真软件OrCAD、PSPICE、Altium Designer、Proteus等所做的实验,信号处理算法通过Matlab/Simulink仿真软件进行验证,并与电路仿真软件对照分析。这些步骤与一般电子电路虚拟仿真实验方法相同,很多文献已经有所论述[10-13],在此不再赘述。
4 结语
基于虚拟仿真技术的无人驾驶汽车跨学科实验平台的构建,促进了教学、科研的发展。汽车防撞预警虚拟仿真实验案例表明,跨学科实验平台的建设是合理有效的,它成功解决了科研教学中的设备问题。该实验平台也为电子通信专业的本科学生和研究生参加“挑战杯”、各类电子竞赛和创新性大学生实验竞赛等大型赛事提供了一个良好的汽车项目教学实验平台。
References)
[1] 安建强.基于虚拟仿真技术的创新训练研究与实践[J].实验技术与管理,2015,32(12):179-182.
[2] 张敬南,张镠钟.实验教学中虚拟仿真技术应用的研究[J].实验技术与管理,2013,30(12):101-104.
[3] 胡晓辉,万嵩.计算机虚拟仿真技术在高教中的应用研究[J].高教学刊,2015(24):81-82.
[4] 魏宏波.基于虚拟仪器技术的实验教学改革探讨[J].中国现代教育装备,2009(11):92-94.
[5] 李奇.桌面虚拟现实及其在网络教育中的应用研究[D].上海:华东师范大学,2004.
[6] 刘承波.信息时代高等学校教学过程的变革及其运行机制[D].厦门:厦门大学,2002.
[7] 邵鹏.网络虚拟实验体系结构研究[D].武汉:华中师范大学,2003.
[8] 钟秉林.国际视野中的创新型人才培养[J].中国高等教育,2007(增刊1):37-40.
[9] 钟秉林.中国大学改革与创新人才教育[M].北京:北京师范大学出版社,2010:45-46.
[10] 陈恒.虚拟仿真技术在电子类实验课程中的应用研究[J].实验室科学,2015,18(3):59-61.
[11] 陈丽霞,范士勇,刘鑫.虚拟仿真技术在现代通信网实验教学中的应用[J].实验技术与管理,2015,32(4):133-135.
[12] 林若波,彭燕标,陈炳文,等.虚拟仿真技术在“电力电子技术”课程教学中的应用[J].云南民族大学学报:自然科学版,2013,22(5):378-381.
[13] 李娜.虚拟仿真技术在数字电路课程改革实践中的应用研究[J].现代教育技术,2010,20(7):147-150.
Construction of interdisciplinary experimental platform for virtual simulation of pilotless automobile
Jiang Xianyang, Tang Xianghong
(School of Communication Engineering, Hangzhou University of Electronic Science and Technology,Hangzhou 310018, China)
By using the virtual simulation technology, an interdisciplinary experimental platform of “Pilotless automobile collision warning technology” for research and teaching is constructed, and based on the combination of Simulink and CarSim, this platform is jointly completed to carry out the design and verification of the logic algorithm of the fuzzy control for automobile collision avoidance warning. Compared with the traditional methods of laboratory construction, this platform construction has the advantages such as lower cost, shorter construction period, more interesting and innovation, and being more able to meet the needs of the rapid updating of knowledge. In addition, it can greatly reduce unnecessary construction cost, and realize the idea of green laboratory construction.
virtual simulation; pilotless automobile; experimental teaching; interdisciplinary experimental platform
10.16791/j.cnki.sjg.2016.11.029
虚拟仿真技术探索与实践
2016-05-12
浙江省高等教育学会高校实验室工作研究重点项目(ZD201601);杭州电子科技大学2016年高等教育研究资助项目(XNFZ201610)
姜显扬(1971—),男,湖北大冶,博士,讲师,主要从事信息与通信专业科研与教学研究.
E-mail:jiangxy@hdu.edu.cn
G642.0;TP391.9
A
1002-4956(2016)11-0117-04
猜你喜欢
劳动保护(2019年3期)2019-05-16
铁道通信信号(2019年2期)2019-03-26
小哥白尼(趣味科学)(2018年12期)2018-12-18
制造技术与机床(2018年10期)2018-10-13
汽车工程师(2018年1期)2018-07-13
中国公路(2017年13期)2017-02-06
汽车实用技术(2015年8期)2015-12-26
采矿与岩层控制工程学报(2015年3期)2015-12-16
民用飞机设计与研究(2015年3期)2015-12-07
电力工程技术(2012年5期)2012-03-25
