
机械结构组合对称概念体系及应用
2016-12-05 10:25戚玉轩邱清盈冯培恩李立新
浙江大学学报(工学版) 2016年10期
戚玉轩, 邱清盈, 冯培恩, 李立新
(浙江大学 CAD&CG国家重点实验室,浙江 杭州 310027)
机械结构组合对称概念体系及应用
戚玉轩, 邱清盈, 冯培恩, 李立新
(浙江大学 CAD&CG国家重点实验室,浙江 杭州 310027)
为了将结构组合对称思想应用于机械创新设计,从对称主体、对称基准角度对机械实例结构进行分解.分析机械实例中多对称主体和基准之间的关系,建立包含单层和多层、串联和并联等关系的机械结构组合对称概念体系.借鉴群论的符号表达,建立机械结构组合对称的符号表示体系和实例表达模型.利用已有机械结构组合对称设计平台,运用Eclat算法,挖掘和提炼机械结构单层组合、多层串、并联组合对称设计应用知识.针对现有机械泵输出流量周期性波动问题,应用组合对称设计知识,发明了四腔体并联组合对称叶片泵.得益于该组合对称设计结构,四腔体周期性波动相互抵消,瞬时扫掠总面积恒定,因而泵输出流量稳定.
组合对称;机械结构对称;对称设计;流量稳定叶片泵
对称现象在机械产品中普遍存在,既有功能、原理层面的抽象对称[1],也有结构层面的几何对称[2-4].
结构对称性在机械设计中应用的共性规律早在上世纪80年前就引起了国外著名学者的注意:Pahl等[5]提出使用对称结构简化设计的思想,Suh[6]给出采用对称形状或零部件满足FRs和约束需求的推理.Jörg[7]比较系统地总结了基本对称用于简单零件结构设计的若干初步知识.Tate等[8]提出识别三维CAD边界实体模型的对称特征算法.
与机械设计同步,结构对称性在机械制造领域引起了国内外学者的注意:Sturges等[9-10]推导了零件结构对称度与零部件装配效率的关系;吴惠彬等[11]通过分析零件间可能关联位置集合的群论结构,探讨了多个对称零件或零件上多个对称特征间的组合匹配问题,得出“顺利装配”的判别方法.白万金等[12]研究航空薄壁件对称与阶梯对称洗削数值模拟方法.
由于组合对称是单对称、复合对称的组合,笔者先后研究了单对称和复合多对称结构的分类、提出面向装配的单对称、复合对称零件表示方法[13-14],构建了机械产品对称性设计知识的挖掘、提炼与计算机支持对称性设计平台[13,15-16],这些都为组合对称研究打下基础.通过对大量结构组合对称产品实例的系统分析,本文提出机械结构组合对称的概念,重点研究组合对称的层次性与串并联连接关系,进而挖掘和提炼了若干机械结构组合对称设计的应用知识,最后运用这些知识发明了一种输出流量稳定的多腔体叶片泵.
1 机械结构组合对称的概念体系
机械结构对称的载体称为对称主体,对称主体包括若干对称组元和对称基准.对称组元是对称主体中相等或相似的部分——旋转、平移对称组元的结构相同,镜射对称组元的结构相似.对称基准包括空间上的点、线、面并具有维度、种类和数目3种属性.“维度”定义基准方向,“种类”定义基准类型,“数目”定义基准个数.对称基准决定了对称的种类并约束了对称组元之间的位置关系.
机械结构对称包括零件和系统的对称.在一个零件层面上,多个、多种对称的叠加称为复合多对称;在可拆分部件或系统层面上,跨零件的多个、多种对称的叠加称为组合对称.
1.1 组合对称部件
在研究部件层面的结构组合对称时,不单独考虑单个零件上结构对称的作用.依据对称主体数目,可将多对称部件分为如下种类.
1.1.1 组合单对称主体部件 仅有唯一对称主体的部件是组合单主体部件,多对称仅表现为多基准的组合.例如图1所示对数螺旋线直齿齿轮副是一个单主体组合对称部件,部件整体有2个对称基准:1)以过啮合点O并垂直于纸面的轴线为旋转对称轴基准;2)以与纸面重合的平面为镜射对称面基准.

图1 对数螺旋线齿轮副[17]Fig.1 Logarithmic spiral gears[17]
1.1.2 组合多对称主体部件 具有多个对称主体的部件是组合对称主体部件,可分如下两类.
1)多个对称零件或多个零件上结构对称要素间的直接组合.例如在齿轮齿条机构中,旋转对称的齿轮与平移对称的齿条啮合(齿轮、齿条作为对称主体),实现了旋转运动与水平直线运动的转换.
2)部件中的某些对称主体跨零件存在,可以形成跨零件对称主体间的组合和跨零件对称主体与对称零件间的组合.如图2所示为三爪轴承拉马,连杆组2与爪杆组3的组合属于两个跨零件旋转对称主体间的组合;连杆组2与底座4的组合属于跨零件对称主体与对称零件的组合;底座4与螺杆1旋移对称内、外螺纹的组合属于零件上对称结构要素间的组合.

1-螺纹轴;2-连杆组;3-爪杆组;4-基座图2 三爪轴承拉马[18]Fig.2 Bearing pullerl[18]
部件内不同对称主体(对称零件)组合时,它们之间的位置关系既可以静态固定也可以动态变化.
从对称基准来看,若各对称主体的基准维度和种类相同,则属于同基准关系.如图2所示,连杆组2、爪杆组3和底座4共用一根旋转对称轴基准,属于同基准关系.
从主体层级来看,如果部件中多个对称主体处于同层级且相互独立,它们构成单层组合关系;如果部件有多个对称层级,即部件内的若干个结构相同或相似的对称主体充当高一层次对称的对称组元,则它们构成多层嵌套关系.
从结构连接与功能关系上看,一般而言,实现能量、信息和物料的合成、分解与分配功能一般采用并联连接,实现传递和输送功能采用串联连接.
单层组合关系:通常表现为多个对称零件间或多个零件对称结构要素间串、并联连接形成的单层次对称组合.
单层串联组合:如图3所示为蜗杆传动机构,蜗杆与涡轮串联连接,实现垂直方向旋转运动的传递功能.零件蜗杆2为螺旋线旋移复合对称,零件齿轮1旋转对称,整个传动机构不对称,是单一层次两零件对称结构要素间的串联组合.
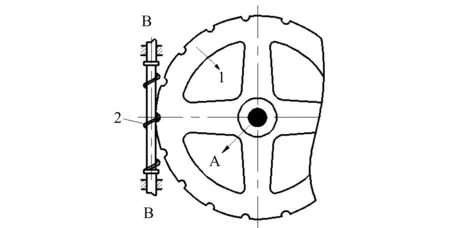
图3 单层串联组合对称实例:蜗轮为主动件的蜗杆传动[19]Fig.3 Single-level series combination symmetry instance: worm drive where worm gear acts as driving part[19]
单层并联组合:如图4所示,拉链A、B两侧多对咪齿并联连接,实现左、右侧物料的合并功能.A、B两侧咪齿分别沿Y轴平移对称,拉链整体不对称,因此属于单一层次两对称零件的并联组合.

图4 单层并联组合对称实例:两边相咬合的拉链Fig.4 Single-level parallel combination symmetry instance: two sides engaged zipper

图5 多层串联组合对称实例:物料传送机构Fig.5 Multi-level series combination symmetryinstance: material transfer mechanism
多层嵌套:经常表现为多个结构相同、相似对称零件或子部件串并联连接形成的多层次对称组合.
多层串联组合:如图5所示为物料传送机构,3个物料输送转轮串联连接,实现物料连续输送的功能.高层次上,视3个旋转对称转轮为对称组元,则部件整体滑移对称;低层次上,每个转轮都旋转对称,因此对称零件间的串联组合形成两个层次的对称嵌套关系.
多层并联组合:如图6所示为三蜗轮机构,蜗杆与3个涡轮并联啮合,实现旋转运动的同步分解功能.在低层次上,视蜗轮、蜗杆为两个对称主体之间串联组合,在高层次上,视3组涡轮蜗杆副各为对称组元,并联组合成一个上层对称主体.

图6 多层并联组合对称实例:三蜗轮机构[19]Fig.6 Multi-level series combination symmetryinstance: worm drive with 3 worm gears[19]
1.2 机械结构组合对称层级体系和组合对称的符号表示
基于部件主体基准与层级关系,得到机械结构组合多对称概念和分类体系,如图7所示.

图7 机械结构组合多对称概念体系Fig.7 Concept system of mechanical structure combination symmetry
任何复杂的对称形式总由镜射σ、旋转Cn和平移Tn3种基本对称叠加而成.基于课题组提出的机械结构单对称、复合对称点群符号表[14],提出结构组合对称部件的符号表示体系.
组合单主体部件:只有一个对称主体,可以直接用熊夫利符号表示.如图1所示,对数螺旋线齿轮副可以表示为C2h.
组合多主体部件:在单层组合部件内,对称零件或结构要素相互作用,通过串并联结合实现力或运动的传递,可用“→”(串联)或“”(并联)符号描述:
[a1→a2→…→an].
(1)
其中,“[ ]”符号表示部件内对称主体关系,a1, …,
an按力或运动的传递顺序依次排列.如图3所示为蜗杆驱动蜗轮转动,两对称零件间为单层级串联连接,整体组合对称结构的符号表示为:[σ→σ].在图4所示的咬合拉链结构中,两侧咪齿相互咬合,两对称零件间为单层级并联连接,整体组合对称结构的符号表示为:[Tn/Tn].
在多层嵌套结构中,同层级的对称表示在“[]”符号内部;高一层级对称表示在“[]”符号前面;同层级串联连接用“→”符号连接,并联连接用“,”符号隔开.两层级多对称部件的一般表示形式为
c[…,→bi,→…].
(2)
其中,bi为低层级对称,c为高层级对称主体,“…”表示被省略的其他对称.需要指出,通过添加必要的“[]”,式(2)的嵌套层次可以无限扩展.
串联组合时,图5物料传送机构的符号表示为:T3σ[D4h→D4h→D4h];并联组合时,图6所示的三蜗轮机构的符号表示为:T3σ[[C5t→Cn], [C5t→Cn], [C5t→Cn]].
如表1所示为机械结构组合对称概念体系及符号表示,实现了机械结构组合对称的分类和规范化表达,奠定了挖掘组合对称设计知识的基础.

表1 机械点群符号表示表[14]
2 基于实例的组合对称设计应用知识的获取
2.1 结构组合对称设计应用知识的获取过程
课题组在Delphi语言环境下开发了机械对称性知识挖掘平台、建立了SQL数据库,编写了Apriori和CPM数据挖掘算法的程序,进而提出了Eclat改进算法,提高了知识挖掘速度[13,15].在此基础上,笔者新建基于实例的组合对称设计应用知识的获取模块,其中包括:结构组合对称实例模板,对应于结构组合对称的功能界面,组合对称实例库和结构组合对称关联知识获取模板等.
结构组合对称设计应用知识获取过程如图8所示.
2.2 结构组合对称实例知识的表达模型
结构组合对称实例的表达模型如图9所示,其中基本信息记录实例的来源、基本结构情况和用途,结构组合对称信息记录实例的结构组合方式,结构对称效用信息记录结构组合对称在广义需求、原理/准则层面发挥的效用.

图8 结构组合对称设计应用知识获取过程Fig.8 Acquisition process of application knowledge of mechanical structure combination symmetry
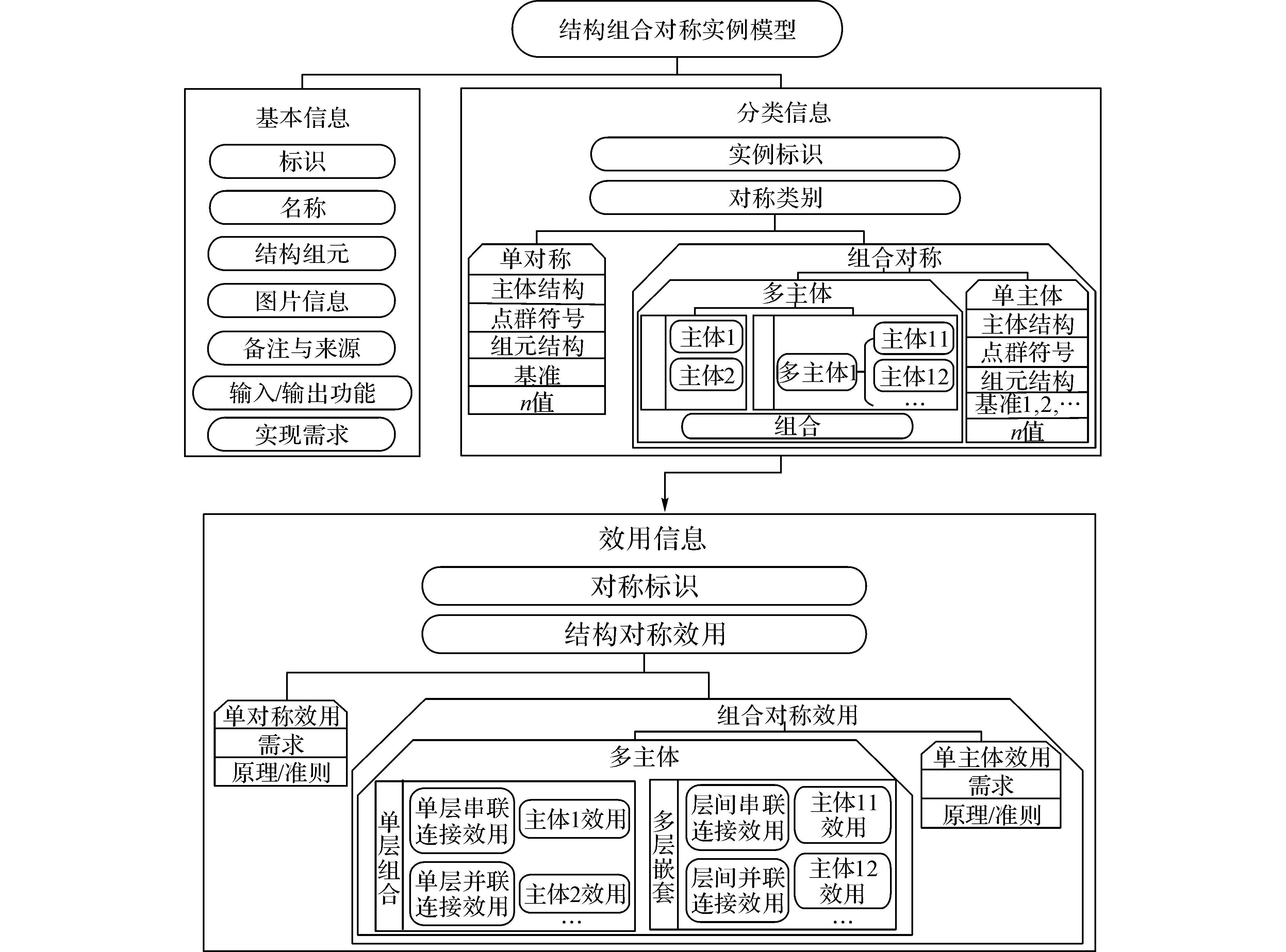
图9 结构组合对称实例知识模型Fig.9 Model of mechanical combination symmetry instance knowledge
以图10所示的双边齿轮齿条机构为例,整体以C-C为基准镜射对称.齿轮1带动齿轮2实现双齿轮齿条副的啮合,同步驱动杆3作往复平移运动.机构在实现目的功能“往复平移运动”的同时,使两个齿轮齿条副沿D-D方向的分力相互抵消,运动更加平稳.
依据图9的实例模型,表2~4给出双边齿轮齿条机构在实例库中三类信息的表示.
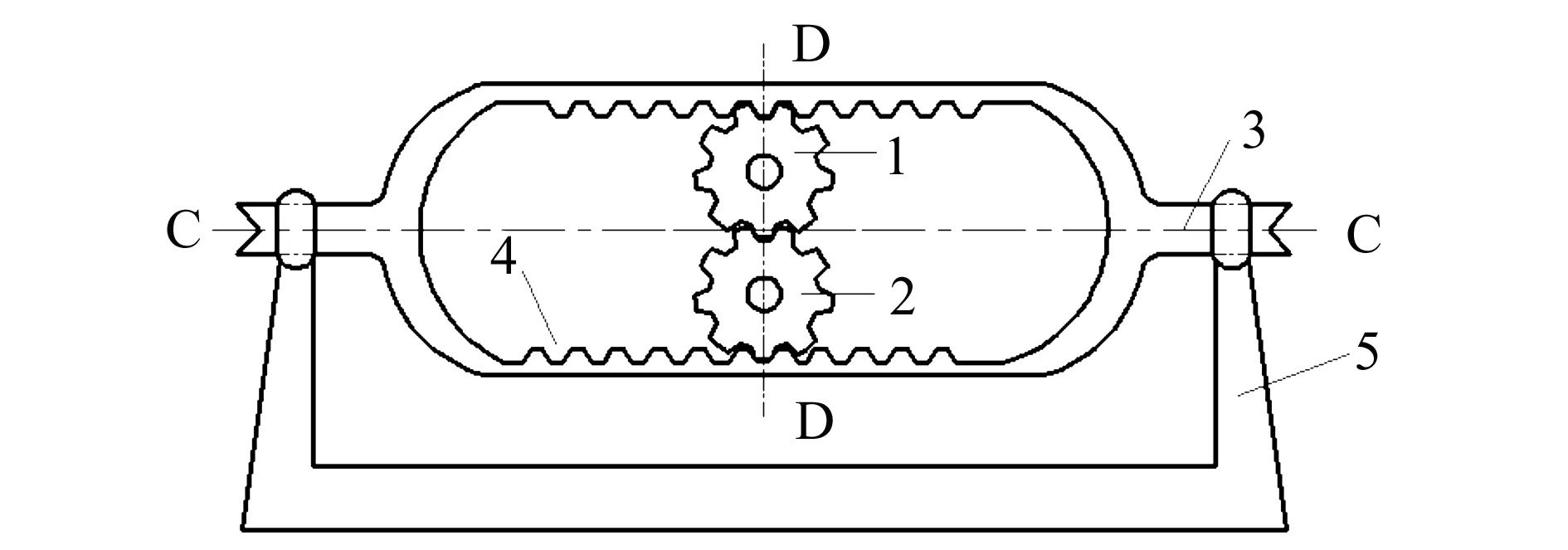
1、2-直齿圆柱齿轮;3-双直齿杆;4-齿条;5-支承座图10 双边齿轮齿条机构[19] Fig.10 Gear rock mechanism with two sides[19]
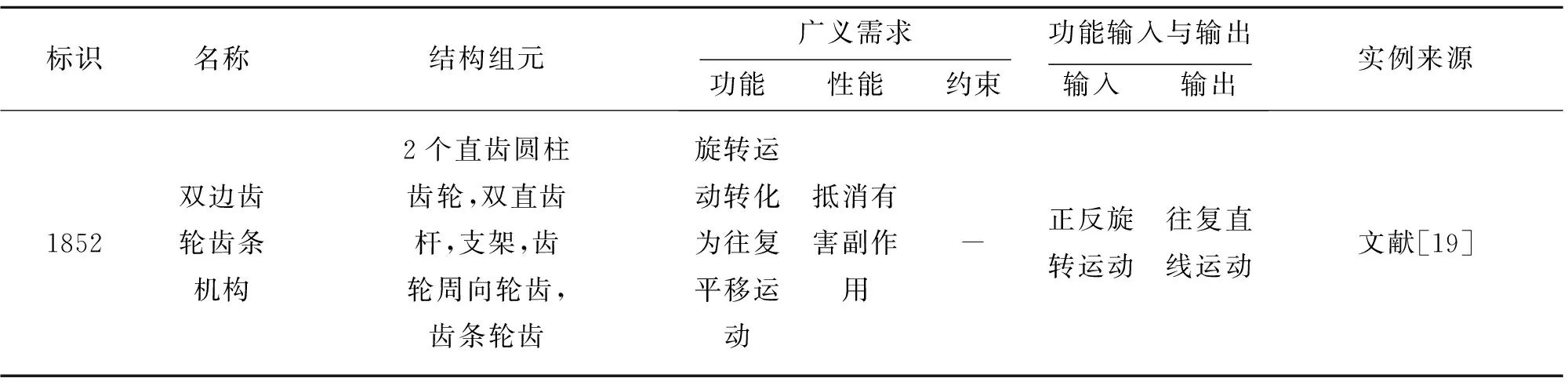
标识名称结构组元 广义需求 功能输入与输出功能性能约束输入输出实例来源1852双边齿轮齿条机构2个直齿圆柱齿轮,双直齿杆,支架,齿轮周向轮齿,齿条轮齿旋转运动转化为往复平移运动抵消有害副作用-正反旋转运动往复直线运动文献[19]

表3 实例1852分类信息片段

表4 实例1852效用信息片段
实例库有1 200多个机械结构组合对称实例(280多个机械结构多对称产品),共实现114种设计需求、2种设计原理和1种设计准则.
2.3 结构组合对称的部分设计应用知识
设计需求包括: ①功能、②性能和③约束,设计原理/准则能够间接实现设计需求.由于单主体对称部件实例很少,仅选择出现频率较高的几类多主体组合类型,提炼出部分机械结构组合对称设计应用知识.
2.3.1 单层组合对称的部分设计应用知识 依据频繁出现的机械结构单对称、复合对称类型,提炼出6种常见的单层对称组合方式,如表5所示.
表5 常见的6种单层组合对称类型
Tab.5 Six commonly seen single-level combination symmetry types
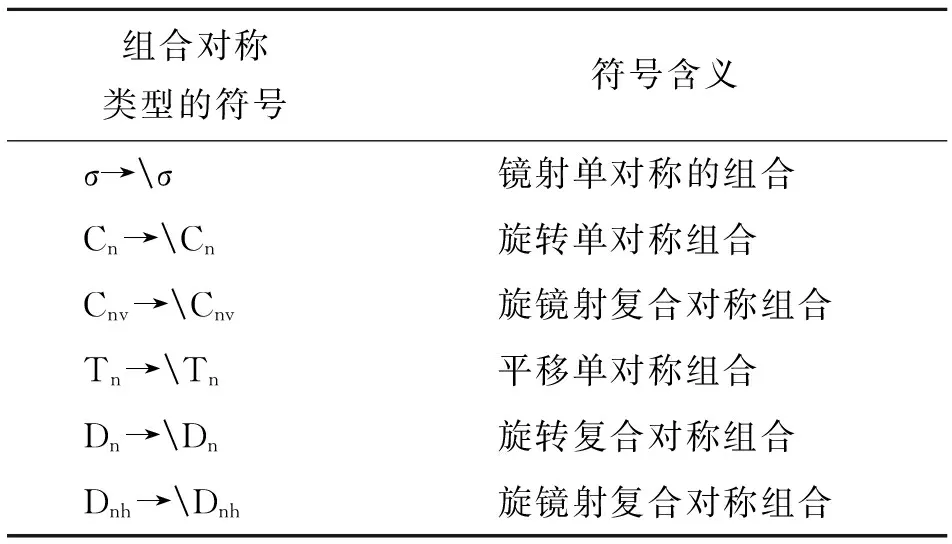
组合对称类型的符号符号含义σ→σ镜射单对称的组合Cn→Cn旋转单对称组合Cnv→Cnv旋镜射复合对称组合Tn→Tn平移单对称组合Dn→Dn旋转复合对称组合Dnh→Dnh旋镜射复合对称组合
1)σ→σ型对称组合.
功能:通常相互作用的两个镜射对称主体的组元实现“左右双向”等价的功能,例如双向停止旋转运动、双向停止平移运动、摆动转换为往复平移运动、传递双向摆动、传递相交轴线双向旋转运动和实现二元状态的切换以及夹持和固定物料的功能.
性能:能够同时实现或交替实现功能,单周期内的输出左右对称.
约束:限制物料为双向移动单自由度.
如图11所示为拨杆式空间联轴机构,叉杆1、2构成σσ并联型对称组合,实现相交轴线双向旋转运动的传递.

图11 拨杆式空间联轴机构[20]Fig.11 Lifting-level type coupling mechanism[20]
2)Cn→Cn型组合.
功能:两个Cn型对称都具有旋转方向性,实现具有“单向旋转”特征的功能,包括传递单向旋转运动或扭矩、单向停止旋转运动等,还能够实现转速的调节.
性能:能够同时实现功能,还能够通过多个Cn型对称主体的同层组合Cn1→Cn2→Cn3→…逐级单向传递扭矩或运动,扩大功能的作用空间.
约束:限于单向旋转.
例如图12所示的内解除爪轮式离合器的转子1与爪2形成C3C3并联型对称组合,实现了单向扭矩与运动的传递.
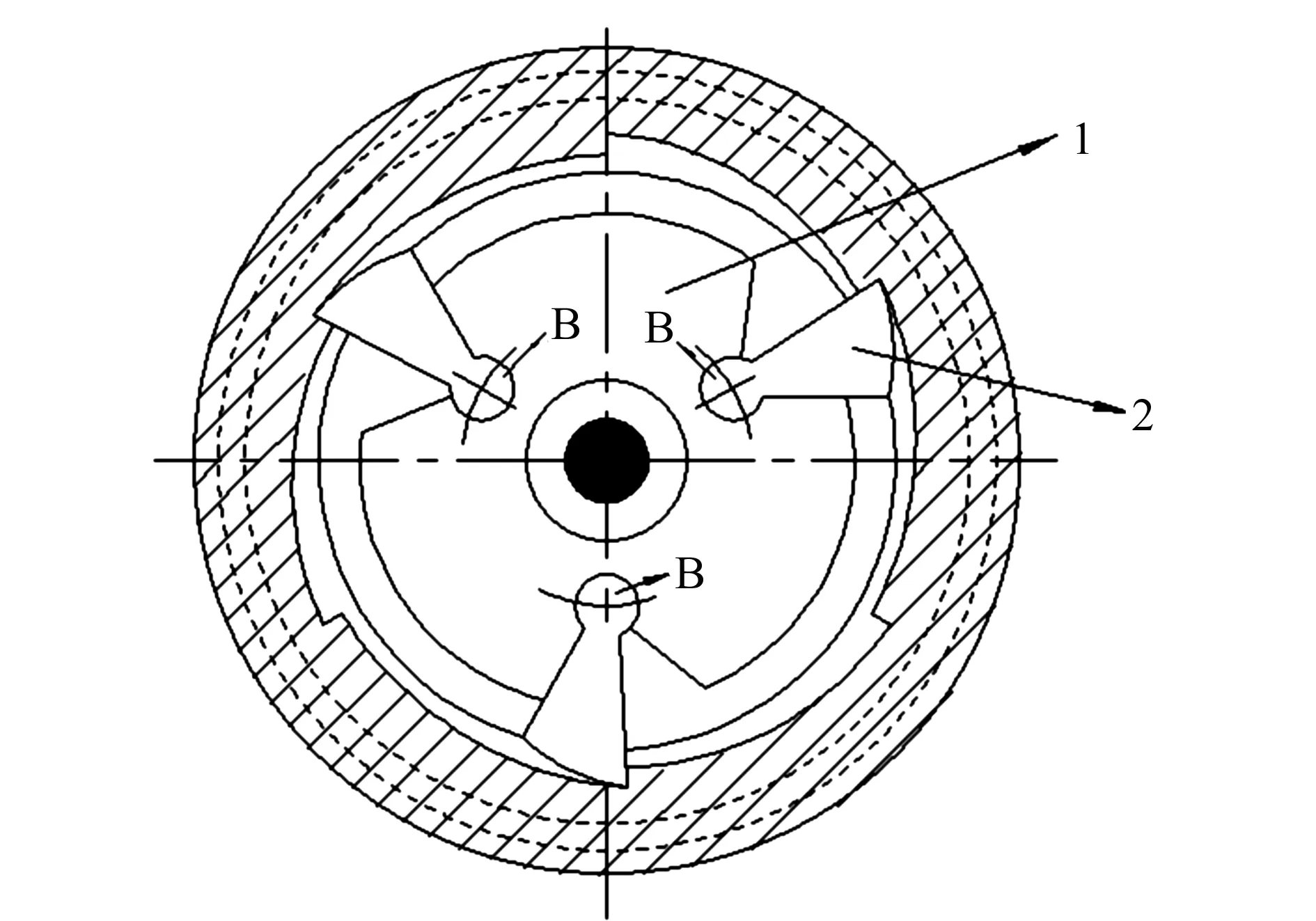
图12 内解除爪轮式离合器[20]Fig.12 Inside-lock-claw type clutch[20]
3)Cnv→Cnv型组合.
功能:两个Cnv型对称主体能传递或结合轴线垂直或同轴的双向旋转运动.
性能:能够连续实现上述功能.
应用举例:直齿锥齿轮传动.
C∞→C∞型对称是Cnv→Cnv型对称的特殊情况(n→∞).
功能:当n趋于无穷大时,两个C∞型对称主体的对称组元理论上可以无限细分.在小功率情况下,可以传递同轴或平行轴线双向旋转运动或扭矩.不仅能够无级变速,还能够进一步增大速比和实现挤压物料功能.
性能:能够提高功能的连续性,扩大功能的空间作用范围,即通过多个C∞同层级组合C∞→C∞→C∞→…逐级小功率传递双向扭矩或运动.
约束:物料移动为双向单自由度.
如图13所示为平行轴圆锥摩擦轮机构,锥轮a、b为C∞→C∞串联型对称组合,实现了相平行轴c到轴d双向旋转运动的传递.
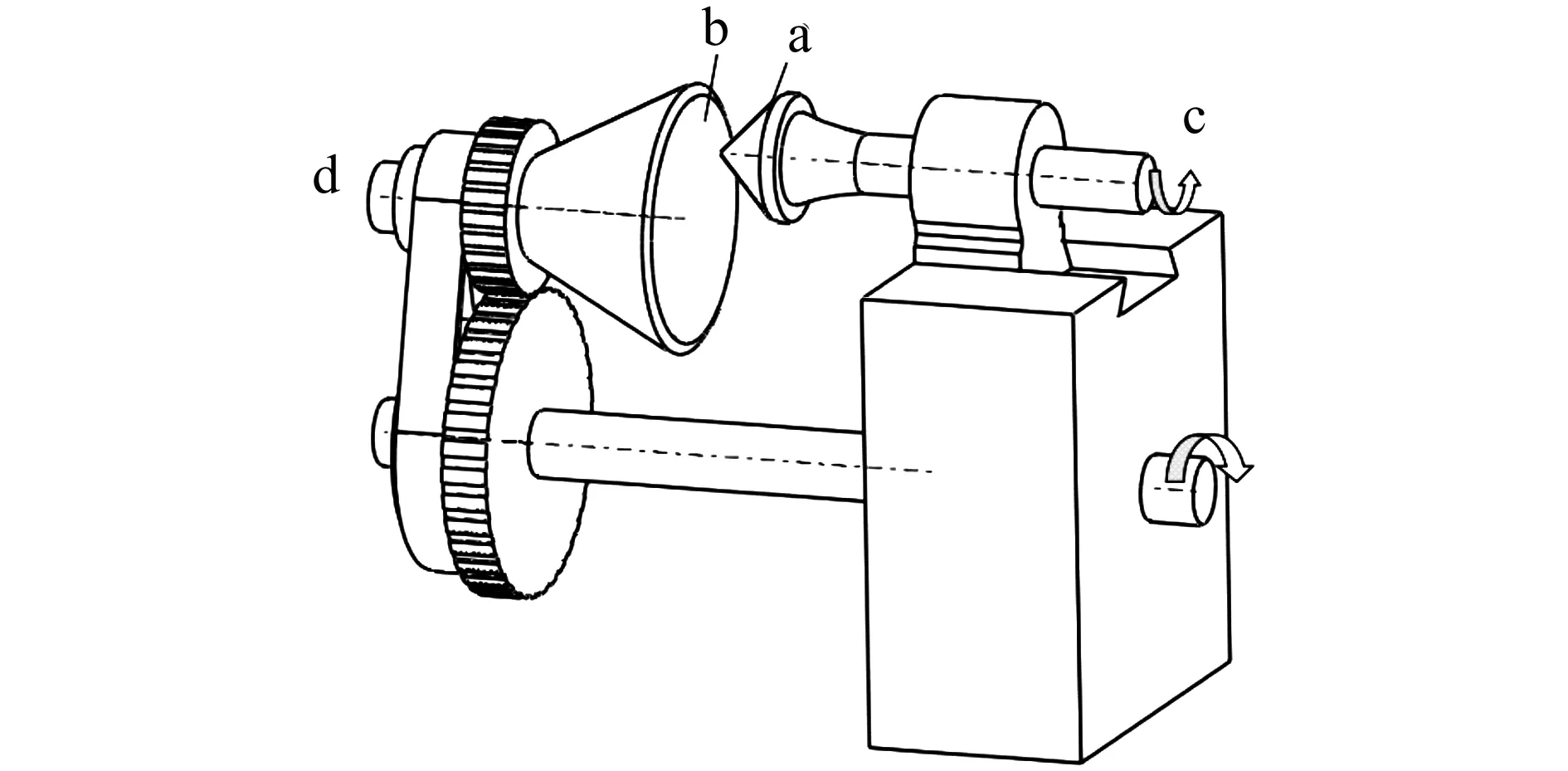
图13 平行轴圆锥摩擦轮机构[19]Fig.13 Friction mechanism with two paralleled cone wheels[19]
4)Tn→Tn型组合.
功能:沿直线方向具有延伸性,主要实现停止直线运动的功能.
性能:能够提高功能的稳定性.
如图14所示为斜面停止机构中两锯齿,是TnTn并联型对称组合,实现了直线方向的止动.

图14 一种斜面停止机构[20]Fig.14 Inclined-plane-stop mechanism[20]
5)Dn→Dn型组合.
a)功能:传递平行轴线反向旋转运动,调节转速.
b)性能:能够连续实现上述功能,还能够扩大功能空间作用范围,即通过多个Dn型对称主体的同层级组合Dn1→Dn2→Dn3→…双向传递扭矩或运动.
这类对称在斜齿轮传动系统中频繁出现,例如斜齿圆柱齿轮副传动.
6)Dnh→Dnh型组合.
功能:传递平行轴线反向旋转运动,调节转速.Dnh→Dnh型组合对称还能够实现液体的连续吸入和排出.
性能:能够连续实现上述功能.
在直齿齿轮传动系统中频繁出现,如齿轮泵中,Dnh→Dnh型组合对称直齿轮副的连续转动实现了液体的连续输出.
D∞→D∞是Dnh→Dnh型组合对称的特殊情况(n→∞).
a)功能:小功率时传递平行轴线双向旋转运动、平移传送物料和碾展物料.
b)性能:能够连续实现上述功能.
c)约束:物料移动自由度为双向单自由度.
如图15所示为双自由度2导轮式圆筒面对偶构成D∞D∞并联型对称组合,实现了棒料的连续平移传送和移动自由度的约束.

图15 双自由度两导轮式圆筒面对偶[20]Fig.15 Two guide wheels cylinder pair with twodegrees of freedom[20]
2.3.2 多层嵌套组合对称的设计应用知识 实例表明,部件常以镜射单对称σ、平移单对称Tn、旋转和镜射组合对称Cnv和滑移对称Tnσ的整体布局方式实现多主体的串并联.仅列出4类串并联结构组合对称所实现的设计需求,如表6~9所示.

表6 σ型串并联组合对称常实现的设计需求

表7 Cnv型并联组合对称常实现的设计需求

表8 Tn型串并联组合对称常实现的设计需求

表9 Tnσ型串并联组合对称常实现的设计需求
3 机械结构组合对称用于产品创新的实践
3.1 问题描述
液压泵的主要功能是提升油液压力,供执行元件使用.叶片泵是各类液压系统常用的一种液压泵.在一个作业循环周期中,叶片在压缩腔内的扫掠体积不均匀,导致单作用和双作用叶片泵出现输出流量发生周期波动的问题.在一些精密设备或医用设备中,常有连续输出无周期性波动液体的功能需求.利用结构组合对称设计知识,发明一种新液压泵,能够同时解决受力平衡问题和瞬时流量周期性波动问题.
3.2 发明过程
设计任务:发明一种转子受力近似平衡,流量稳定,噪音小、发热小、纯机械结构的无冲击液压泵.
核心功能、性能:利用平台挖掘、检索功能,得出表10所示的组合对称设计应用知识,指明了设计方向.
原理与结构解:现有叶片泵采用扩大体积吸油,压缩体积排油的物理效应,转子中叶片的瞬时扫掠面积动态变化,当转速恒定时,输出流量呈周期性波动.如图16所示,采用与现有叶片泵同样的物理效应,但是将原来单泵腔体独立工作转变为四腔体并联工作.通过调整4个腔体叶片的相位角,使4个腔体转子叶片的瞬时扫掠面积之和恒定,实现泵的总输出流量稳定.
表10 平台检索得到的组合对称设计应用知识
Tab.10 Combination symmetry application knowledge searched using platform

功能性能组合对称设计应用知识知识来源输出压力流量稳定①多组元对称布置,即:对称组元依次运动,减弱单组元周期运动的波动性三腔体活塞风机受力动态平衡②镜射对称、旋镜射对称或旋移组合对称的布局方案实现系统作用力分布的动态旋转对称钳抓车床夹具发动机曲轴
为了确保“合并”后能够输出“流量稳定高压油”,各并联子功能输出的“波动高压油1”、“波动高压油2”、“波动高压油3”和“波动高压油4”应便于叠加.为此,将单个腔体内定子与转子剖面设计为椭圆(镜射对称)与圆(旋转对称)的对称组合.此时,叶片瞬时扫掠面积与叶片转角的关系为简单的三角波曲线.

图16 泵体结构原理简图Fig.16 Schematic diagram of pump
1-单向阀;2-腔体;3-叶片;4-转子图17 子腔体剖面结构Fig.17 Section structure of one cavity

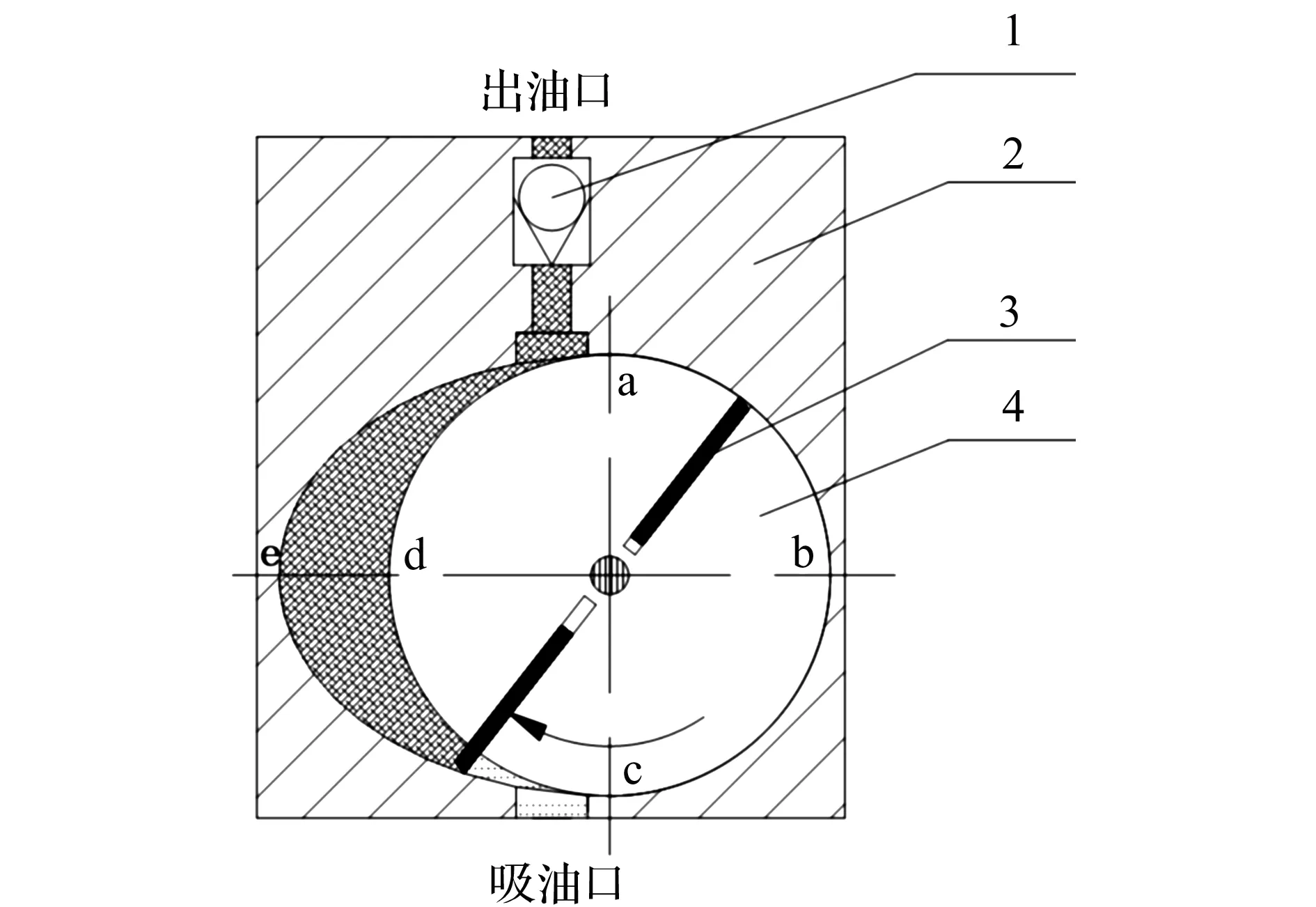
1-单向阀;2-腔体;3-排油口;4-吸油口;5-腔室内壁曲面;6-转子外圆柱面图18 去除转子的腔室剖面结构Fig.18 Section structure of one cavity without rotor
选取图18所示的x-y坐标系,分段解析函数表达式(以c为旋转起点,k为图19中三角形的斜率)如下.
1)θ∈[0,π/2].

(3)
2)θ∈[π/2, π].
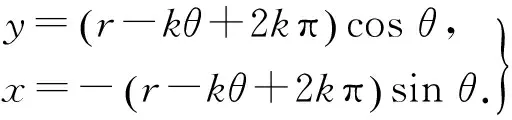
(4)
3)θ∈[π, 2π].
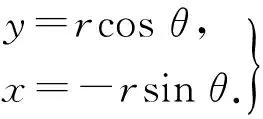
(5)

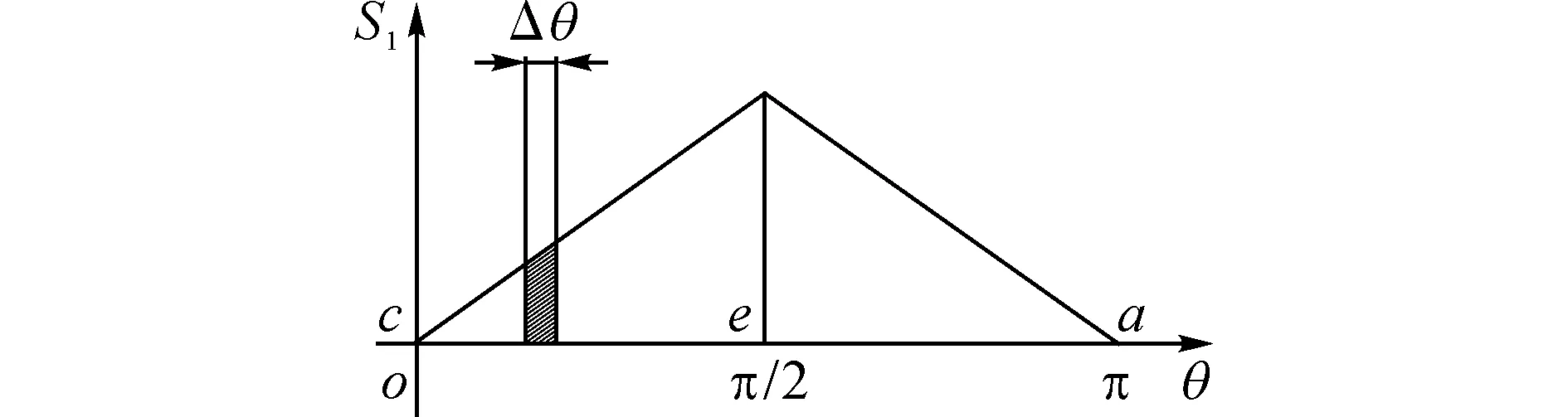
图19 扫掠面积S1与转角θ的关系曲线Fig.19 S1-θ curve
采用如图16所示的结构,泵体包含①、②、③和④四个完全相同的子腔体,采用纵向平移对称的结构布置方式,油路为并联组合.4个腔体的转子由同一根轴驱动,①、③和②、④腔体的叶片转角相位差为π/2.由图20可知,S1、S2、S3、S4为各腔体叶片扫掠面积,S为总扫掠面积.此时4个子腔体输出流量并联后发生动态补偿,各叶片瞬时扫掠总面积恒定,因而最终总流量输出稳定.该方案首次从原理上保证了总输出流量的稳定均匀性,已获得发明专利(专利号:201510008329.7).
该发明将表10所列知识①、②进行组合运用,同时解决了流量稳定和受力平衡两种性能.从表面上看,组合对称是对称的组合,本质是不同对称设计知识的组合,因而,相比于单对称设计知识,组合对称设计知识更有助于解决多目标设计问题.

图20 四腔体流量叠加图Fig.20 Total output of 4 cavities
4 结 语
本文首次提出机械结构组合对称概念体系,研究组合对称关联知识的挖掘,归纳出若干结构组合对称设计应用知识,揭示了对称组合的作用.发明实践表明:与一般设计知识相比,组合对称设计知识能够拓宽设计思路,更有助于解决产品的发明与创造过程中的单目标、多目标设计问题.
课题组研究功能对称、原理对称和结构对称之间以及静态、动态对称之间的组合关系,探寻对称设计知识之间的组合兼容性问题.对平台功能作进一步拓展,以期将对称设计知识更系统、更智能地运用于各类型产品设计中.
[1] 冯培恩,曾令斌,邱清盈,等.机械功能对称的概念体系及应用[J].机械工程学报,2012, 48(11): 1-10.
FENG Pei-en, ZENG Ling-bin, QIU Qing-ying, et al. Research on mechanical function symmetry architecture and its application [J]. Journal of Mechanical Engineering, 2012, 48(11): 1-10.
[2] 郭玉刚.全对称微机械陀螺非理想特性分析[D].哈尔滨:哈尔滨工业大学,2009.
GUO Yu-gang. Analysis of nonideal characteristics on a fully-symmetrical micromachined gyroscope [D]. Harbin: Harbin Institute of Technology, 2009.
[3] 汪国胜,雷强顺,李波,等.基于双弹簧对称布置的刚度可调式半主动悬架设计[J].装甲兵工程学院学报,2015, 28(5): 25-28.
WANG Guo-sheng, LEI Qiang-shun, LI Bo, et al.Design of semi-active suspension with adjustable stiffness based on double springs arranged symmetrically [J]. Journal of Academy of Armored Force Engineering, 2015, 28(5): 25-28.
[4] 闻德生,杨杰,郑珍泉.双定子对称型多泵多速马达理论特性分析[J].农业机械学报, 2014, 45(7): 321-324.
WEN De-sheng, YANG Jie, ZHENG Zhen-quan. Theory analyses of double stator symmetrical type multi-pump and multi-speed motor [J]. Transactions of the Chinese Society for Agricultural Machinery, 2014,45(7): 321-324.
[5] PAHL G, BEITZ W. Engineering design: a systematic approach [M]. New York: Springer, 1996: 159-164.
[6] SUH N P. Axiomatic design: advanced and applications [M]. Oxford: Oxford University Press, 1998: 173-174.
[7] JÖRG B. Die systematische ausnutzung von symmetrieeigenschaften beim konstruieren [D]. Braunschweig: Technische Univertität Braunschweig Fakultät für Maschinenbau und Elektrotechnik, 1990.
[8] TATE S J, JARED G E M. Recognizing symmetry in solid models [J]. Computer-Aided Design, 2003, 35(7): 673-692.
[9] STURGES R H. A quantification of manual dexterity: the design for an assembly calculator [J]. Robotics and Computer-Integrated Manufacturing, 1989, 6(3): 237-252.
[10]BOOTHROYD G, DEWHURST P, KNIGHT W. Product design for manufacture and assembly [M]. 3rd ed. [S. l.]: CRC, 2010.
[11] 吴惠彬,张迎战.机械装配中的对称群方法[J].北京理工大学学报,2005,25(10): 852-855.
WU Hui-bin, ZHANG Ying-zhan. Symmetry group in mechanical assembling [J]. Transactions of BeijingInstitute of Technology, 2005, 25(10): 852-855.
[12] 白万金,柯映林,吴红兵,等.航空薄壁件对称及阶梯对称铣削的数值仿真与分析[J].中国机械工程,2009,20(2): 214-217.
BAI Wan-jin, KE Ying-lin, WU Hong-bing, et al. Numerical simulation and analysis of symmetry and step-symmetry milling of aerospace thin-walled workpiece [J]. China Mechanical Engineering, 2009,20(2): 214-217.
[13] 马志勇,邱清盈,冯培恩,等.机械对称性的概念体系及其应用方法[J].浙江大学学报:工学版,2010,44(12): 2354-2359.
MA Zhi-yong, QIU Qing-ying, FENG Pei-en, et al. Concept system and application method of mechanical symmetry [J]. Journal of Zhejiang University: Engineering Science, 2010, 44(12): 2354-2359.
[14] 冯培恩,马友才,邱清盈,等.机械零件对称群及其在面向装配设计中的应用[J].机械工程学报,2013,49(11): 98-105.
FENG Pei-en, MA You-cai, QIU Qing-ying, et al. Symmetry groups of mechanical parts and its application in design for assembly [J]. Journal of Mechanical Engineering, 2013, 49(11): 98-105.
[15] 冯培恩,刘屿,邱清盈,等.提高Eclat算法效率的策略[J].浙江大学学报:工学版,2013,47(2): 223-230.
FENG Pei-en, LIU Yu, QIU Qing-ying, et al. Strategies of efficiency improvement for Eclat algorithm [J]. Journal of Zhejiang University: Engineering Science, 2013, 47(2): 223-230.
[16] MA Zhi-yong, ZHANG Tai-xia, LIU Fan, et al. Konwledge discovery in design instances of mechanical structure symmetry [J]. Advances in Mechanical Engineering, 2015, 7(11): 1-19.
[17] 机械设计手册编委会.机械设计手册(新版)[M].北京:机械工业出版社, 2010.
[18] 轴承拉马.[2015-03-19].
http:∥detail.tmall.com/item.htm?spm=a230r.1.14.15.C6C4KO&id=18910353879&ad_id=&am_id=&cm_id=140105335569ed55e27b&pm_id=&abbucket=4.
[19] 孟宪源,姜琪.机构构型与应用[M].北京:机械工业出版社,2004: 150, 131.
[20] 李宗良,林永立(编译).现代机构百科(上册)[M].北京:世界图书出版公司,1990:9, 84, 471, 541.
Concept system and application of mechanical structure combination symmetry
QI Yu-xuan, QIU Qing-ying, FENG Pei-en, LI Li-xin
(StateKeyLaboratoryofCAD&CG,ZhejiangUniversity,Hangzhou310027,China)
The structures of mechanical instances were decomposed from the perspective of symmetry subject and reference in order to apply the idea of structure combination symmetry in the process of mechanical innovation design. Relationships among these multi-symmetry subjects and multi-symmetry
within mechanical instance were analyzed. The concept system of mechanical structure combination symmetry was established, which includes single-level, multi-level, series and parallel combining relations. The symbolic expression system and instance expression model of mechanical combination symmetry were proposed referring to the symbols used in group theory. The design application knowledge of mechanical structure with single-level combination symmetry and multi-level in series and parallel combination symmetry were data mined and extracted by employing Eclat algorithm in the existing design platform of mechanical structure combination symmetry. The combination symmetry knowledge was employed to design a new vane pump with four chambers which were symmetrically combined and parallel connected in order to solve the periodic fluctuation problem of the output flow of existing mechanic pumps. The periodic fluctuations of the output flows of four chambers were cancelled out, and the total instant sweeping area was invariable benefiting from the very structurally combined symmetry design. The output flow of the designed pump was stable.
combination symmetry; mechanical structure symmetry; symmetry design; vane pump with stable output flow
2015-10-01.
国家自然科学基金资助项目(51175455).
戚玉轩(1984—),男,博士,从事机械设计理论的研究. ORCID:0000-0002-7556-616X. E-mail:qiyvxuan@163.com
邱清盈,男,副教授. ORCID: 0000-0001-6884-3125. E-mail:medesign@zju.edu.cn
10.3785/j.issn.1008-973X.2016.10.008
TH 112
A
1008-973X(2016)10-1889-13
浙江大学学报(工学版)网址: www.zjujournals.com/eng
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
装备制造技术(2020年3期)2020-12-25
装备制造技术(2020年3期)2020-12-25
装备制造技术(2020年1期)2020-12-25
电子制作(2019年23期)2019-02-23
消费导刊(2018年8期)2018-05-25
燕山大学学报(2015年4期)2015-12-25
中国舰船研究(2015年2期)2015-02-10
高中生学习·高三版(2014年3期)2014-04-29
高中生学习·高三版(2014年3期)2014-04-29
