
四轮轮毂电动汽车质心侧偏角自抗扰控制
2016-12-02 02:37宋新飞
电子技术应用 2016年10期
陈 锐,孙 鹤,宋新飞,张 强
(中国人民解放军第一航空学院 航空电子工程系,河南 信阳 464000)
四轮轮毂电动汽车质心侧偏角自抗扰控制
陈锐,孙鹤,宋新飞,张强
(中国人民解放军第一航空学院 航空电子工程系,河南 信阳 464000)
汽车的质心侧偏角对汽车稳定性和安全性有重要意义,设计了基于自抗扰控制理论的用于四轮轮毂电动汽车质心侧偏角的高性能控制策略。分析了汽车质心侧偏角控制的动态模型,并通过数学变换将其转换为二阶自抗扰控制器被控对象的标准形式;设计双层控制结构,包括直接横摆力矩制定层和转矩分配层。在直接横摆力矩制定层,利用二阶自抗扰控制器计算出控制质心侧偏角所需的附加横摆力矩;在转矩分配层,设计了转矩分配算法。最后,通过MATLAB/Simulink和汽车动力学仿真软件CarSim联合仿真验证了所设计控制策略的有效性。
四轮轮毂;质心侧偏角;自抗扰控制技术;直接横摆力矩控制
0 引言
在对汽车质心侧偏角的研究中发现,当汽车质心侧偏角被控制在一定范围时,驾驶员才可通过方向盘的操作控制汽车行驶转向。当质心侧偏角超过这个范围,汽车将失控。而如何对汽车质心侧偏角进行合理高效的控制一直是人们关注的重点[1-3]。
本文所研究的对象是四轮轮毂电动汽车,相比一般电动汽车单电机驱动方式,四轮轮毂电动汽车采用四轮独立驱动,可以通过直接横摆力矩控制来控制汽车的侧向动态性能[4-6]。对于直接横摆力矩控制,现有的控制算法有 PID控制、模糊控制[7]、自适应控制[8]等。PID控制算法简单、参数少、可靠性高,但是 PID控制对负载变化的自适应能力弱,对系统内外干扰的抑制能力差;而如模糊控制和自适应控制这样的高级控制算法,也有实时性较弱和结构复杂、控制结果不理想等缺点。基于以上控制算法的不足,本文提出的四轮轮毂电动汽车质心侧偏角控制策略基于自抗扰控制算法(Active Disturbance Rejection Control,ADRC)。自抗扰控制算法是一种不依赖被控对象精确模型的控制方法,具有算法简单、响应速度快、系统超调低、抗干扰能力强、适用范围广等优点。当被控对象参数发生变化或系统存在不确定性扰动时,该控制器具有很好的自适应性和鲁棒性。
本文针对四轮轮毂电动汽车可通过直接横摆力矩控制的特点,设计了一种双层控制结构,即基于自抗扰控制算法的直接横摆力矩制定层和转矩分配层,实现了对四轮轮毂电动汽车的质心侧偏角控制。基于MATLAB/Simulink和汽车动力学仿真软件 CarSim的联合仿真,证明了本文设计控制算法的有效性。
1 模型分析与数学变换
采用具有侧向和横摆两个运动自由度的操纵模型——线性二自由度汽车操纵模型对汽车质心侧偏角进行控制分析。
该模型方程如下[9]:
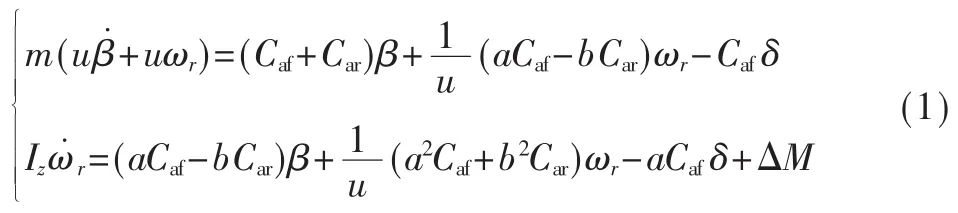
式中:m表示车辆质量,u为车辆纵向车速,β为质心侧偏角,ωr为横摆角速度,δ为前轮旋转角度,Caf、Car分别为前轮侧偏刚度和后轮侧偏刚度,α、b分别为前后车轮的轴距,Iz为车辆围绕 Z轴的转动惯量,ΔM为附加横摆力矩值。
将描述线性二自由度操纵模型的式(1)改写成状态方程的形式:


2 控制器设计
本文设计的控制策略采用双层结构,上层为基于自抗扰的直接横摆力矩制定层,下层为转矩分配层。控制算法的结构框图如图1所示。

图1 双层控制结构框图
2.1直接横摆力矩制定层
如图2所示,在直接横摆力矩制定层,设计了一个自抗扰控制器,它由跟踪微分器、扩张状态观测器、误差非线性组合、扰动补偿等环节组成。

图2 双层控制结构框图
对于式(6)的二阶系统,是二阶自抗扰控制器被控对象的标准形式,可使用二阶自抗扰控制器进行控制,相应数学模型为:
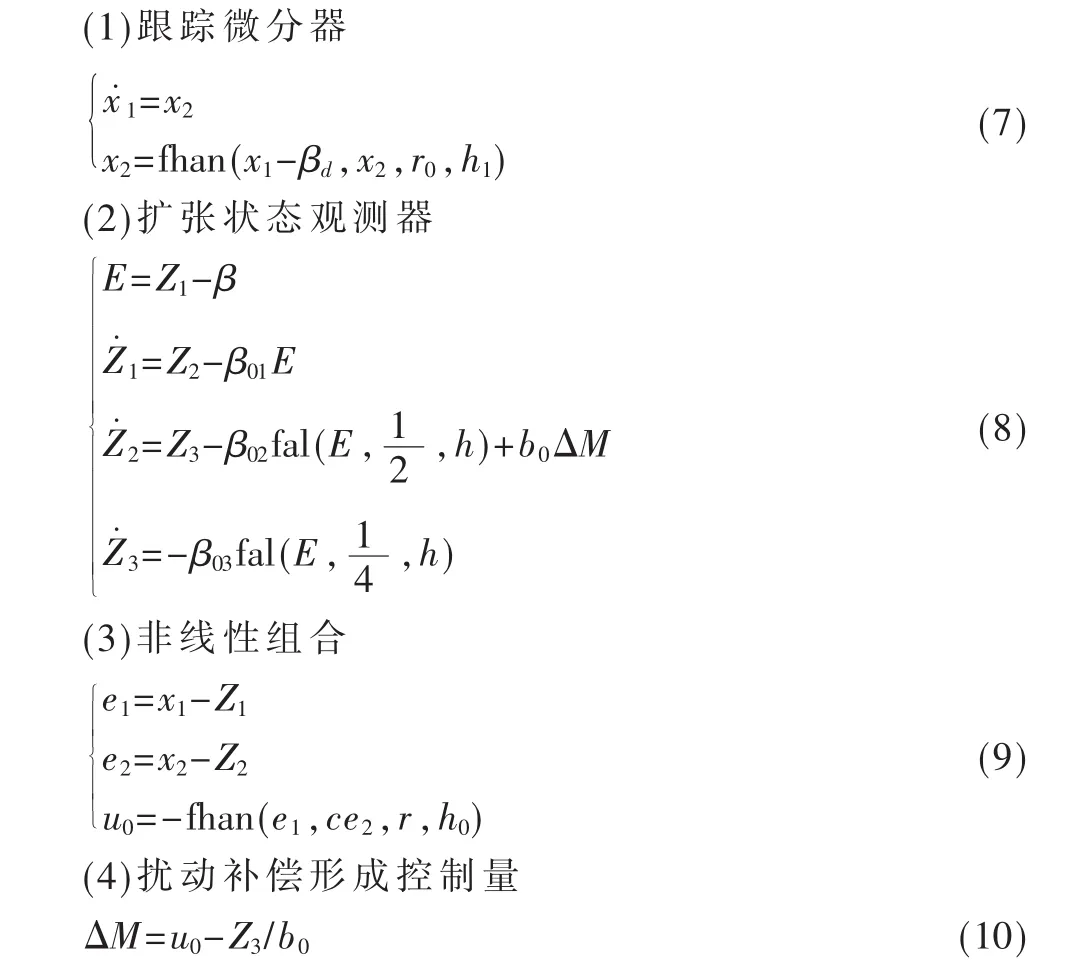
其中:x1是对期望质心侧偏角βd的跟踪,x2为x1的微分;fal()是对应非线性函数,fhan()是最速控制综合函数,包含r0和h1两个参数,用于让x1以加速度r0跟踪设定信号 βd[10];Z1、Z2是对状态变量 X1、X2的估计值,X3是对不确定扰动 f的估计值。e1为误差信号,e2为误差微分信号;u0为误差反馈控制量,用Z3对 u0进行补偿,得到绕汽车Z轴所需的附加横摆力矩ΔM。
2.2转矩分配层
转矩分配实质上就是有约束的最优化分配问题,为了简化控制算法,本文转矩分配层采用一侧驱动轮增加附加横摆力矩的同时,另一侧驱动轮相应减少的分配方法,算法如下:

其中,T′=Kθc,是每个驱动轮的期望驱动转矩,θc是加速踏板深度,K是反映加速踏板和期望驱动转矩之间对应关系的常数。分别表示给 4个电驱动系统的转矩设定值。
3 仿真与实验结果
3.1仿真模型搭建
本文采用 CarSim-MATLAB/Simulink联合仿真平台对设计的控制策略进行仿真验证分析。
CarSim是一款专门用来分析汽车动力学的仿真软件,如图3所示。CarSim与MATLAB/Simulink的数据通信是通过CarSim S-Function模块实现的,MATLAB-/Simulink模块通过计算得到4个电驱动系统的转矩设定值Torque,通过S-Function模块施加到CarSim车辆模型中,使CarSim车辆模型所建车辆系统按照相应值行驶,再通过S-Function模块采集车辆数据。

图3 CarSim-MATLAB/Simulink联合仿真
3.2实验验证与分析
利用搭建的仿真模型对本文设计汽车质心侧偏角控制策略的跟踪性能和抗扰性能进行验证分析。仿真车辆的参数取值如表1所示。
(1)跟踪能力验证

表1 车辆参数表
控制策略跟踪能力测试时,汽车行驶工况设定为:初始车速80 km/h,仿真时间10 s。实验目标是使汽车质心侧偏角去跟踪设定曲线(正弦信号),最终控制结果跟踪曲线如图4所示。
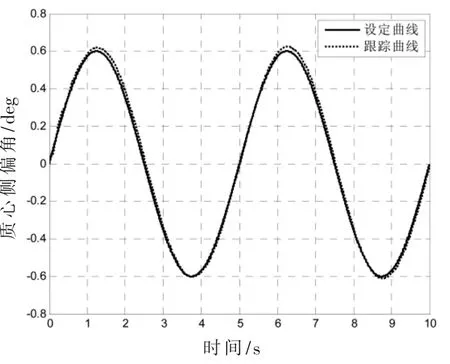
图4 质心侧偏角跟踪结果图
图4中,实线是需要跟踪设定曲线,虚线是跟踪结果曲线,2条曲线的误差很小,基本吻合,说明采用本文设计的汽车质心侧偏角控制算法,可以使汽车质心侧偏角实现对设定值的快速、准确跟踪。
(2)抗扰能力验证
从前文的系统扰动公式不难分析出一种建模扰动:前轮转角扰动。接下来分析设计的控制算法对这种扰动的抗扰能力。汽车行驶工况设定为:直行工况(预先设定的质心侧偏角为常量0),车速设为80 km/h,仿真时间10 s。
如图5所示,施加的前轮转角扰动由阶跃扰动和骤变扰动组合而成。汽车受到该扰动,从2 s开始质心侧偏角明显偏离了设定值0。偏离结果如图6所示。

图6 质心侧偏角受到扰动后的结果图
同时采用PID控制器完成了抗扰能力测试,与本文基于自抗扰控制器的控制算法进行对比。
仿真结果如图7所示。两个控制器都将质心侧偏角值控制到了 0 deg附近,但是,采用自抗扰控制器时,控制系统对干扰的抑制能力更强,具有干扰后波动小、恢复控制效果时间短的优势。这表明自抗扰控制策略控制性能明显优于常规的PID控制方法。

图7 质心侧偏角抗扰控制结果对比图
4 结论
本文对四轮轮毂电动汽车的质心侧偏角控制问题进行了深入研究,设计了一种基于自抗扰控制理论的控制策略。通过CarSim和MATLAB/Simulink联合仿真平台进行验证。结果表明,该控制算法能够使汽车质心侧偏角很好地跟踪设定值,且能够抑制系统中干扰的影响,具有响应速度快、控制精度高、适应能力强等优点。
[1]BOADA B L,BOADA M J L,DIAZ V.Vehicle sideslip angle measurement based on sensor data fusion using an integrated ANFIS and an Unscented Kalman Filter algorithm[J].Mechanical Systems and Signal Processing,2016,72-73:832-845.
[2]Xiao Feng.Evaluation of a novel nonlinear observer to estimate sideslip angle and tire forces for distributed electric vehicle[R].SAE Technical Paper,2016.
[3]Nam Kanghyun.Estimation of sideslip and roll angles of electric vehicles using lateral tire force sensors through RLS and Kalman filter approaches[J].Industrial Electronics,IEEE Transactions on,2013,60(3):988-1000.
[4]DEMIRCI M,GOKASAN M.Adaptive optimal control allocation using Lagrangian neural networks for stability control of a 4WS–4WD electric vehicle[J].Transactions of the Institute of Measurement and Control,2013,35(8):1139-1151.
[5]IVANOV V,SAVITSKI D,AUGSBURG K,et al.Wheel slip control for All-Wheel drive electric vehicle[C].Proc.the 18th International Conference of the ISTVS 2014,2014.
[6]CHEN Y,HEDRICK J K,GUO K.A novel direct yaw moment controller for in-wheel motor electric vehicles[J].Vehicle System Dynamics,2013,51(6):925-942.
[7]Shen Qikun,Bin Jiang,COCQUEMPOT V.Fuzzy logic system-based adaptive fault-tolerant control for near-space vehicle attitude dynamics with actuator faults[J].Fuzzy Systems,IEEE Transactions on,2013,21(2):289-300.
[8]SOLTANPOUR M R,SHAFIEI S E.Robust adaptive control of manipulators in the task space by dynamical partitioning approach[J].Elektronika ir Elektrotechnika,2015(5):73-78.
[9]Fu Chunyun,Hu Minghui.Adaptive sliding mode-based direct yaw moment control for electric vehicles[C].Control,Automation and Information Sciences(ICCAIS),2015 International Conference on.IEEE,2015.
[10]韩京清.自抗扰控制技术[J].前沿科学,2007,1(1):24-31.
Active disturbance rejection control for side-slip angle of four in-wheel driven electric vehicle
Chen Rui,Sun He,Song Xinfei,Zhang Qiang
(Department of Aeronautical Electronic Engineering,the First Aeronautical College of Air Force,Xinyang 464000,China)
The side-slip angle of vehicle has a great influence on stability and safety.The control for four in-wheel independent drive(4WID)electric vehicles side-slip angle is designed.A two layer control model(direct yaw-moment control layer and torque distribution layer)is presented to achieve the high performance control.In the upper layer,a direct yaw-moment controller based on Active Disturbance Rejection Control(ADRC)is built through carefully analyzing the control system.Then the deviation torque is calculated for the purpose of control.In the lower layer,an algorithm is designed to distribute torque to the motor drive systems.In the end,the effectiveness of the controller is examined using a driving simulator system.
four in-wheel independent drive;side-slip angle;ADRC;direct yaw-moment control
TP273
A
10.16157/j.issn.0258-7998.2016.10.024
(2016-03-22)
陈锐(1989-),男,硕士,助理工程师,主要研究方向:四轮独立驱动电动汽车智能控制。
中文引用格式:陈锐,孙鹤,宋新飞,等.四轮轮毂电动汽车质心侧偏角自抗扰控制[J].电子技术应用,2016,42(10):92-95.
英文引用格式:Chen Rui,Sun He,Song Xinfei,et al.Active disturbance rejection control for side-slip angle of four in-wheel driven electric vehicle[J].Application of Electronic Technique,2016,42(10):92-95.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年5期)2022-04-02
上海涂料(2021年5期)2022-01-15
北京航空航天大学学报(2021年4期)2021-11-24
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
物理教学探讨(2018年1期)2018-02-13
制造技术与机床(2017年10期)2017-11-28
制造业自动化(2017年2期)2017-03-20
应用科技(2015年5期)2015-12-09
