地铁隧道清洗车动力学性能研究
2016-12-02 05:20徐凯,李芾,安琪
铁道机车车辆 2016年5期
徐 凯, 李 芾, 安 琪
(西南交通大学 机械工程学院, 四川成都 610031)
地铁隧道清洗车动力学性能研究
徐 凯, 李 芾, 安 琪
(西南交通大学 机械工程学院, 四川成都 610031)
随着地铁的飞速发展,地铁隧道清洗车在隧道清洗工作上起到了举足轻重的作用。在对地铁隧道清洗车进行设计时,通过SIMPACK多体系统动力学软件,对地铁隧道清洗车进行了动力学分析。分析结果表明,该地铁隧道清洗车的蛇行临界速度大于车辆的构造速度80 km/h的要求,在美国V级谱激励下,运行平稳性满足优级标准,曲线通过性能满足要求。
地铁; 隧道清洗车; 动力学性能
随着我国经济的飞速发展,城市交通的拥堵问题以及环境的保护逐渐成为了社会和人类关注的重点。相比于传统的公共交通工具,地铁最大化的利用了地下空间,在运量上远超过公交车,且能源消耗,污染等远低于公交车,这些特点使得地铁成为了许多城市重点发展的公共交通工具。当地铁隧道完成施工时,隧道内各壁面、轨道以及路基等部位会残留许多灰尘等污垢,随着运营时间的推进,地铁车辆运行时制动磨耗等因素产生的污垢都将停留在隧道中。这些污垢附着在轨道扣件以及电气设备上,如果没有对这些污垢进行及时处理,将会对电气设备的正常运行造成影响,使其运行灵敏度下降,地铁故障率和维修成本将大大增加,严重时还将造成事故的发生。因此,使用地铁隧道清洗车对隧道进行定时清洗可以缓解上述问题,并美化地铁环境。本文对地铁隧道清洗车的动力学性能进行研究,以期对地铁隧道清洗车的发展具有一些指导意义。
1 隧道清洗车的基本结构
隧道清洗车的转向架采用两系弹簧悬挂的方式。轮对采用锥形橡胶堆弹簧定位方式,由锥形橡胶堆提供一系垂向刚度及车辆运行时所需要的纵向和横向定位刚度。由于隧道清洗车和普通地铁车辆不同,隧道清洗车载重较大且具有偏载等特性,因此转向架的二系悬挂也与普通地铁车辆有所不同,没有采用成本较高和维护方面较难的空气弹簧,改由橡胶堆、横向液压减振器等组成。车体和构架之间采用Z字型拉杆完成牵引工作。车体和构架之间设置弹性横向止挡来抑制车体的大幅度横向位移。根据最高运行速度和该车辆行驶时制动距离的要求,转向架的基础制动装置采用单侧踏面制动方式。该地铁隧道清洗车具体技术参数如表1所示。
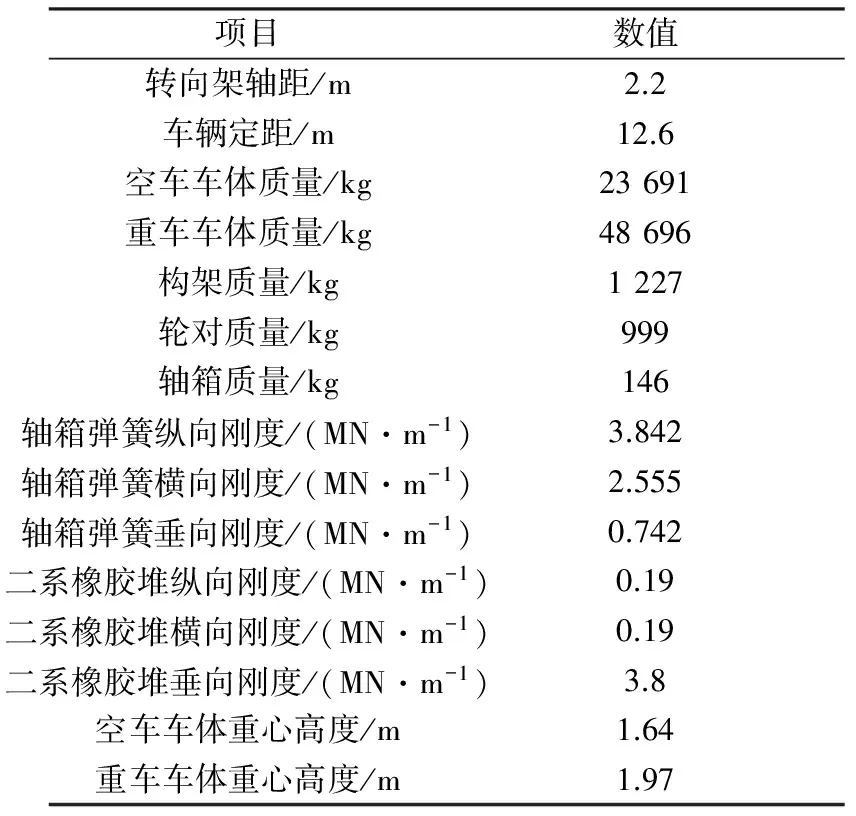
表1 地铁隧道清洗车技术参数
2 动力学计算模型
运用SIMPACK多体动力学软件对地铁隧道清洁车进行动力学建模,考虑车体、构架、轮对等部件为刚体,对其减振器和横向止挡进行非线性建模,其非线性特性如图1所示。
由于转向架系统中存在轮轨接触等非线性因素,车辆的垂向运动和横向运动耦合在一起,因此在计算模型中将横向和垂向的运动综合起来作为一个大系统考虑,系统横向和垂向共有27个自由度,动力学计算模型如图2所示。
3 动力学性能分析
根据运营要求,地铁车辆的动力学性能应符合GB- 5599-1985《铁道车辆动力学性能评定和试验鉴定规范》相关标准要求,其与UIC 518(Testing and approval of railway vehicle from the point of view of their dynamic behavior-Safety-Track fatigue-Ride quality)存在一定的异同,二者之间存在诸多相通之处,故同时采用上述两个标准进行评定,主要动力学性能评定指标为:车辆运行稳定性,车辆运行平稳性和曲线通过性能等。

图1 减振器及横向止挡非线性特性

图2 动力学计算模型
3.1 车辆运行稳定性分析
根据UIC 515规定,当车辆以最高运行速度运行时,在4~8 Hz范围内,若连续出现6个大于8 m/s2的峰值,则认为车辆运行失稳。根据UIC 518规定,应在100 m范围内,以10 m为窗口对构架横向振动加速度的均方根(RMS,Root Mean Square)值进行滑动平均,加速度最大值应小于其限值。UIC 518规定,每根轮轴的轮轨导向力之和应小于其限值。
根据上述判定方法,对地铁隧道清洗车的车辆运行稳定性进行分析计算,计算结果如图3所示。
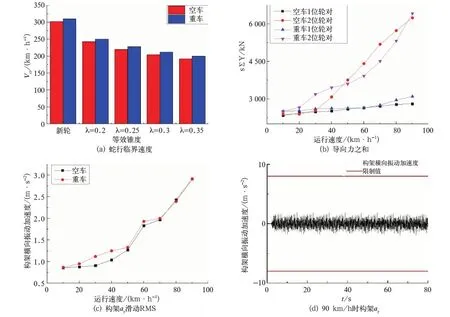
图3 车辆运行稳定性指标
计算结果表明,地铁隧道清洗车在空重车情况下的临界速度均远远大于车辆的构造速度80 km/h;在车辆以90 km/h运行时,车辆的构架横向加速度RMS和轮轨导向力之和RMS均小于UIC 518中规定的限值,满足地铁隧道清洗车的运行稳定性要求。
3.2 车辆运行平稳性分析
车辆所受到的外力是由于轨道对轮对的强迫位移激振而引起的,此处采用美国V级轨道谱作为线路激扰。根据GB 5599-1985规定,客车运行平稳性采用车体上心盘(转向架中心)偏离横向1 000 mm处地板面上的最大横向加速度、最大垂向加速度、横向平稳性指标和垂向平稳性指标来表示。而UIC 518中规定加速度测量点则在转向架中心销上部,即不偏离1 000 mm,此处则按照GB 5599-1985的规定选取测量点,这种选取对于UIC 518来说是偏于危险的。
根据上述判定方法,对地铁隧道清洗车的车辆运行平稳性进行分析计算,计算结果如图4所示。

图4 车辆运动平稳性指标
计算结果表明,地铁隧道清洗车空重车状态下在美国ⅴ级线路上运行时,在90 km/h速度范围内,最大横向加速度ay和最大垂向加速度az均小于UIC 518规定的限制值2.5 m/s2;横向平稳性指标Wzy和垂向平稳性指标Wzz均达到GB 5599-1985的优级标准,满足运行要求。
3.3 曲线通过安全性分析
在计算曲线通过安全性时,将由直线段、缓和曲线和圆曲线3种曲线来组成。在车辆从直线段进入缓和曲线再进入圆曲线的过程中,会受到很多外界激扰因素的影响,且对车辆系统不同部位的作用各不相同,且随着曲线距离而不断变化。
在研究车辆曲线通过安全性时,考虑的内容包括轮轨横向力、轮轴横向力、轮轨垂向力、脱轨系数和轮重减载率。计算方法为让地铁隧道清洗车空重车模型通过一段带激励的设置有直线、超高的缓和曲线和圆曲线组成的线路,根据获取的轮轨间的作用力来评定各项曲线通过性能动力学指标。
计算曲线通过时,根据实际使用情况下不同线路曲线半径设置了不同的超高和缓和曲线,具体的线路条件如表2所示。根据地下铁道设计规范相关规定,线路未平衡离心加速度不超过0.4 m/s2,故最大欠超高取60 mm。
地铁隧道清洗车空重车的曲线通过安全性分析结果如图5和图6所示。

表2 曲线通过线路设置
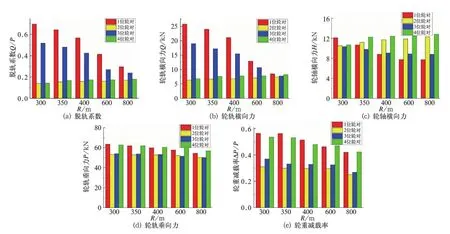
图5 空车曲线通过安全性指标
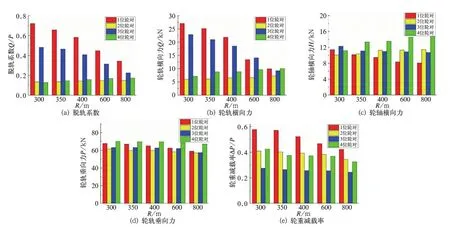
图6 重车曲线通过安全性指标
在半径300,350,400,600 m和800 m曲线上,地铁隧道清洗车空重车在以表2设置速度下运行,其轮轨横向力Q、轮轴横向力H、轮轨垂向力P、脱轨系数Q/P、轮重减载率△P/P都在GB 5599-1985的标准之内,车辆曲线通过安全性满足要求。
4 结 论
介绍了地铁隧道清洗车的基本结构,采用二系橡胶堆代替传统地铁车辆的空气弹簧,并通过SIMPACK多体动力学软件对地铁隧道清洗车进行了建模,并对其动力学性能进行仿真计算。计算结果表明,地铁隧道清洗车空重车车辆在新轮新轨情况下,临界速度均较高,能满足运行要求;当踏面等效锥度磨耗至0.2,0.25,0.3和0.35时,空重车车辆也均能满足运行要求。地铁隧道清洗车空重车车辆在美国V级线路上运行时,在90 km/h速度范围内,轮轴导向力RMS和构架横向振动加速度RMS均小于UIC 518的规定的限制值,在以90 km/h速度运行时,最大构架横向振动加速度在4~8 Hz频率内小于UIC 515的规定的限制值,满足运行要求。地铁隧道清洗车空重车车辆在美国V级线路上运行时,在90 km/h速度范围内,最大横向加速度ay和最大垂向加速度az均小于UIC 518规定的限制值2.5 m/s2,横向平稳性指标Wzy和垂向平稳性指标Wzz均达到GB 5599-1985的优级标准。在半径300 ,350,400,600 m和800 m曲线上,地铁隧道清洗车轮轨横向力Q、轮轴横向力H、脱轨系数Q/P、轮重减载率△P/P都在GB 5599-1985的标准之内,车辆曲线通过安全性满足要求。经过线路试验表明,该地铁隧道清洁车所有动力学性能均与计算预测接近,满足运行要求;在运营过程中,其性能优良,运营状况良好。因此,该地铁隧道清洗车满足运行动力学性能要求,在我国地铁隧道清洗装备发展中具备较好的应用和发展前途。
[1] 徐 凯. 基于刚柔耦合的集装箱平车车体动态特性研究[D]. 成都:西南交通大学,2015.
[2] Kimberly S Heyden,etc. Effect of Particle characteristics on particle velocity[J].Power Techonology,2003,131(1):7-14.
[3] Johnson Jr,Virgil E, Chahine G L. The development of structured Cavitating Jet for Deep Hole bits[R]. SPE11060,1982:546-557.
[4] Plesset M S,Chapman R B. Collapse of an Initially Spherical Vapour Cavity in the Neighborhood of a Solid Boundary[J],J.Fluid Mesh,1917,47:283-290.
[5] Christian Bach. Hydrogen utility vehicle keeps streets clean in Switzerland[D]. Fuel Cells Bulletin,2012,2012(4):13-14.
[6] Minnich George. A clean ride. Building EMS vehicles for easier cleaning &decontamination [D]. JEMS,2003,28(5):104-15.
[7] Fang T,Liang W,Lee C F. A new solution branch for the Blasius equation a shrinking sheel problem[J].Computers and Mathematics With Application,2008,(12):3088-3095.
[8] 黄运华, 李 芾, 付茂海,等. 120 km/h B型地铁车辆动力学性能研究[J]. 机车电传动, 2009,(5):27-29.
[6] 郑 威, 柯 坚, 刘桓龙,等. 地铁隧道壁面冲洗装置的结构研究[J]. 现代机械, 2014,(3):38-40.
[7] 段 晓.地铁隧道清洁车技术开发与研究[D].济南:山东大学,2011.
[8] 涂汉卿. 地铁隧道清洁设备的设计[J]. 城市轨道交通研究, 2012, 15(9):119-121.
[9] 郑 威.地铁隧道清洗装备的研制[D].成都:西南交通大学,2014.
[10] 于连玉, 郭 强, 白云记. 地铁线路清洁2号车设计参数确定[J]. 铁道机车车辆, 2010, 30(6):62-64.
[11] 李 建. 地下铁道自动化清洁功能的设想与探讨[J]. 陕西建筑, 2012,(3):5-7.
[12] 高慧莹.轨道专用清理维护车的设计与研究[D].长春:长春理工大学,2012.
Research on Dynamic Performance of Subway Tunnel Cleaning Vehicle
XUKai,LIFu,ANQi
(Department of Mechanical Engineering, Southwest Jiaotong University, Chengdu 610031 Sichuan, China)
With the fast development of urban, the subway tunnel cleaning vehicle plays an important role in the tunnel cleaning. When designing the subway tunnel cleaning vehicle, the subway tunnel cleaning vehicle was simulated in SIMPACK to analyze the dynamic performance. The results showed that the critical speed of the subway tunnel cleaning vehicle was above the design speed 80km/h and that the running stability and the curve negotiation meted the requirement in American V excitation level.
subway;tunnel cleaning vehicle;dynamic performance
男,博士生(
2016-06-13)
1008-7842 (2016) 05-0130-05
U239.5
A
10.3969/j.issn.1008-7842.2016.05.30
猜你喜欢
铁道车辆(2021年1期)2021-08-30
数学物理学报(2021年3期)2021-07-19
科学与生活(2021年29期)2021-03-24
中国金属通报(2020年7期)2020-11-04
科技与创新(2020年19期)2020-10-09
现代商贸工业(2020年24期)2020-07-17
铁道运营技术(2020年2期)2020-04-08
铁道通信信号(2020年10期)2020-02-07
铁道标准设计(2019年7期)2019-07-10
中国铁道科学(2015年6期)2015-06-21