神华八轴机车无线同步控制的制动系统软件设计
2016-12-02 05:13:03张维
铁道机车车辆 2016年5期
张 维
(法维莱交通设备科技(北京)有限公司 技术部, 北京 100015)
神华八轴机车无线同步控制的制动系统软件设计
张 维
(法维莱交通设备科技(北京)有限公司 技术部, 北京 100015)
铁路重载运输的核心技术之一是采用机车分布式组合列车编组方式,通过无线同步控制系统实现远程机车的统一管理和同步操纵。以神华八轴电力机车法维莱制动系统为研究对象,从制动技术和软件设计的角度,对制动系统无线同步控制功能的软件设计进行研究;采用有限状态机模型工具,分析制动控制软件增加无线同步控制功能需要考虑的要素;提出关于软件架构设计的建议和实现方法。结果表明,在以状态机模型为基础的制动控制软件中,功能模块的划分、状态机结构的设计和调整对软件设计及其功能实现至关重要,对制动系统的可靠性和安全性有重要影响。
制动系统; 无线同步控制; 软件; 架构
近年来,随着我国铁路货运需求的增长,重载运输成为重要的发展趋势。开行长大重载货物列车是提高铁路货物运输能力的有效方式。为了实现更多运量,列车编组逐渐加长,一台机车已无法满足功能需求,需要同时配置两台甚至更多台机车,各台机车之间的信息交互问题亟待解决。根据美国、南非、澳大利亚等国的经验,这种远距离的控制和管理可以通过无线同步控制系统来实现。各台机车安装无线同步控制装置,通过无线通信对各远程机车的牵引和制动进行统一管理和同步操纵[1]。
大秦线和神黄线是我国发展重载货运的主要线路。为了提升运输能力,神朔铁路机务段决定对其所属的由大同电力机车有限公司生产的神华八轴电力机车加装无线同步控制装置。法维莱公司生产的制动系统是该机型装配的制动系统之一,应此要求需增加与无线同步控制装置交互的接口和功能,制动系统控制软件需做相应的升级改动。
制动系统是机车车辆的重要组成部分,是实施减速和停车作用的执行机构,确保列车的可靠性和安全性,软件作为控制核心,其设计结构和性能至关重要。
1 无线同步控制概述
在长大列车编组中,两台或两台以上的机车根据需求分别配置在列车的前端、中部以及尾部。机车无线同步控制系统能实现多机之间的无线同步操纵,包括机车远距离编组和零距离编组的工况,同时具有满足不同类型机车之间混联要求的扩展能力。系统以不改变机车原有功能为前提,能快速建立机车之间的互联,实现各机车牵引和制动作用的同步执行和协调运作[2]。
1.1 列车级管理
置于列车最前端的机车为主控机车,中部及尾部机车为从控机车。每台机车都装有无线同步控制装置,主控机车与从控机车之间通过无线同步控制装置进行通信,采用无线电通信方式。当列车制动或缓解时,多台机车在不同位置同时对列车管进行充风或排风,相当于多个风源,可以缩短空气波在列车中的传播距离,减少空气制动系统的反应时间,提高工作效率[3-4]。
主控机车经无线电装置发出控制指令,列车编组中的从控机车接收到主控机车的控制指令后在本车执行,同时将本车的状态信息反馈给无线同步控制系统[4]。列车级结构见图1所示。
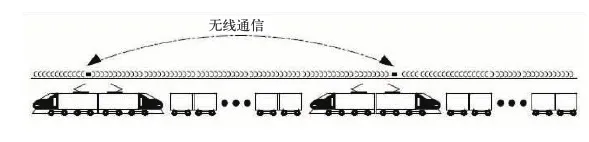
图1 无线同步控制列车级结构
1.2 车辆级管理
神华八轴电力机车为双节重联机车,两节车的无线控制系统(Radio Control System, RCS)通过多功能车辆总线(Multifunction Vehicle Bus, MVB)互相连接。每节车的列车控制和管理系统(Train Control and Management System, TCMS)通过MVB2网络与每节车的RCS通信。
为了实现系统的冗余功能,两节机车的RCS设备均与TCMS相连。正常情况下,只有1台RCS设备激活,处于工作状态;当发生故障时,故障设备设置为非激活状态,另1台设备投入运行。车辆级结构如图2所示。

图2 无线同步控制车辆级结构
1.3 制动系统功能需求
无线同步控制模式下,由RCS对列车编组中各机车的制动系统状态进行监测,传输主控机车的制动控制指令及从控机车的制动状态信息。机车制动系统负责车辆级制动控制。
主控机车制动系统与非无线同步控制模式下的控制方式一致,根据本车制动控制器的指令进行制动和缓解,在执行正常制动和缓解操作的基础上,实时将制动指令和相关信息按照通信协议传输给RCS,用于RCS进行状态监测和数据传输。
从控机车制动系统不再根据本车制动控制器的指令进行制动和缓解,而是根据RCS传输的主控机车的目标压力值对本车的均衡压力和列车管压力进行控制,从而实现制动系统的远程控制,确保从控机车与主控机车的制动和缓解作用一致。
制动系统应能实现无线同步控制模式下的自动制动功能和单独制动功能。在出现RCS通信丢失时,制动系统应采取合理而有效的保护措施,确保列车的运行安全。
2 制动控制单元结构
制动控制单元(Brake Control Unit,BCU)是法维莱机车制动系统的微机控制单元,是集软硬件为一体的核心控制平台,实时处理制动系统的模拟量、数字量、网络通讯数据和制动相关信息等,用来实现制动系统的逻辑功能控制、信息化数据处理、故障诊断和监测、以及事件记录等。该装置采用智能化、模块化和集成化设计,具有安全防护措施和自我诊断功能,可靠性高,结构紧凑,配置优化。
2.1 制动控制单元硬件结构
制动控制单元硬件包括电源、电压转换、中央处理单元、MVB、CAN、数字输入、数字输出、模拟输入和模拟输出等板卡。
2.2 制动控制单元软件结构
BCU软件基于多任务实时操作系统平台而建,是制动系统的控制核心。软件模块基本划分为三种类型:操作系统和驱动模块、标准程序模块,以及应用程序模块。
2.3 有限状态机
有限状态机,又称有限状态自动机,简称状态机,是一种具有离散输入输出系统的数学模型,表示有限个状态以及在这些状态之间的转移和动作等行为。它具有有限数量的内部状态,根据当前的输入可以确定下一步的状态和行为。可以认为许多系统或部件始终处于有限多个状态之一[5]。
制动系统的应用层软件基于有限状态机模型,所有重要工况被定义为有限个状态,每种状态有严格的判断条件,当条件满足时,程序按照不同状态的优先级首先进入优先级最高的状态逻辑,执行该状态对应的程序。有限状态机原理如图3所示。
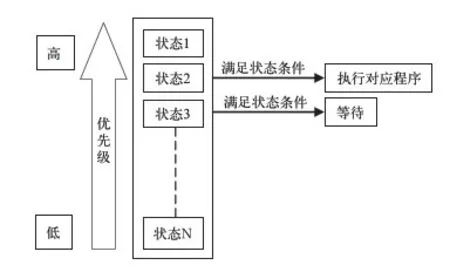
图3 有限状态机原理
3 无线同步控制的软件设计
3.1 设计原则
在制动系统的原有基础上增加无线同步控制功能,对整个控制软件的结构将产生重大影响。方案设计的原则是保持原有系统的独立性及完整性,将与无线同步控制相关的函数单独形成一个无线同步控制模块,尽量降低新模块与原有模块的交叉性和耦合性[6]。当系统设置为非无线同步控制模式时,所有功能保持与原来一样,不可有功能缺失或降级;当系统设置为无线同步控制模式时,制动系统应该能够及时响应无线同步控制系统指令并进行状态反馈,满足列车制动、缓解的一致性及安全性要求。
在制动系统控制软件的10个应用程序模块中,因加入无线同步控制功能而需要改动的主要有4个模块:上位机通信模块、故障诊断及管理模块、制动功能模块和MVB通信模块。此外,任务管理模块和输入、输出模块有小的改动,其余模块保持不变。应用程序模块变化如表1所示。
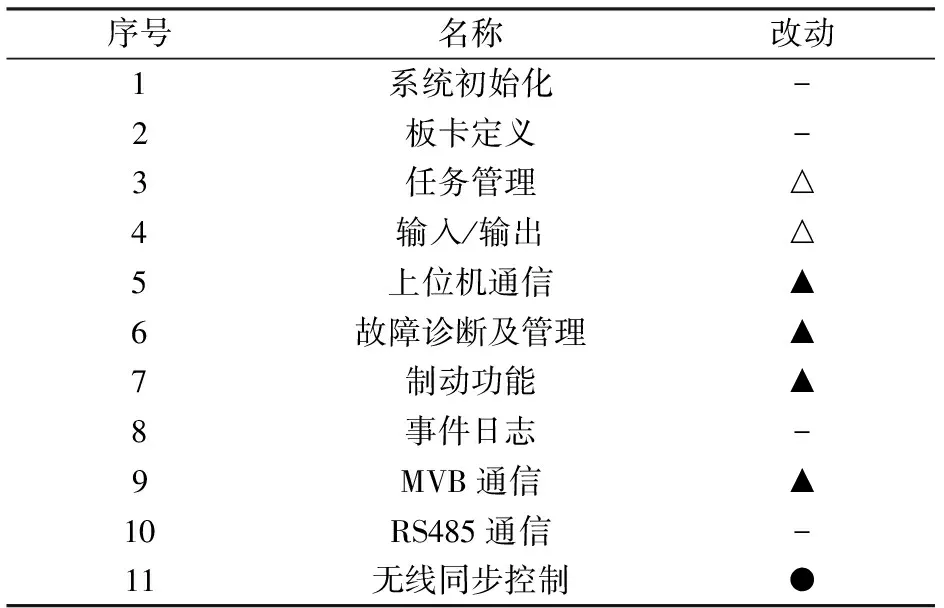
表1 应用程序模块变化
注:-为无改动,△为较小改动,▲为重大改动,●为新增。
3.2 MVB通信模块设计
由于硬件所限,制动系统与无线同步控制设备之间没有直接的通信接口,需要通过TCMS传递信息,再与无线同步控制设备进行信息交换。为了使原有的BCU与TCMS之间的MVB通信不受到影响,新增两个MVB端口,所有与无线同步控制相关的数据使用新增的端口。BCU与TCMS之间的通信接口如图4所示。

图4 BCU与TCMS通信接口
3.3 制动功能模块设计
3.3.1 无线同步控制状态的定义
在对软件进行架构设计时,首先要确定是否将无线同步控制模式定义为软件有限状态机中的一种状态,然后要确定如何使制动系统准确地区分无线同步控制模式和非无线同步控制模式。
制动系统的有限状态机只包含重要工况,并非所有的工况都定义为状态,界定的原则是:此工况是否有清晰的判断条件,并且是否与其他功能模块相对独立,后者尤其重要。由于无线同步控制模式是一种独立工况,制动系统一旦处于该工况,功能发生重大改变,籍此考虑,完全可以将无线同步控制模式定义为软件有限状态机中的一种状态。
接下来要定义无线同步控制状态的优先级。状态优先级的定义,直接关系到制动系统的功能是否能够正确执行和实现。如果系统不能适时执行重要的程序逻辑,整个制动系统的可靠性和安全性都无法得到保障,造成的后果不堪设想。因此,优先级的定义至关重要。通过对制动系统软件中的所有状态进行分析和比对,发现大部分的状态在无线同步控制模式下都不再得到响应,因此,无线同步控制状态的优先级可以排在所有这些状态之前。而基于整个系统的功能要求,制动系统在备用状态时不允许设置无线同步控制模式,所以将无线同步控制状态的优先级排在系统初始化和备用状态之后,其他状态之前。更新后的状态机模型如图5所示。

图5 更新后的状态机模型
3.3.2 自动制动功能模块的设计
神华八轴机车为双节重联机车,每台车装有两台制动系统。在无线同步控制模式下,制动系统共有4种配置情况:主控车操纵端单元、主控车非操纵端单元、从控车操纵端单元和从控车非操纵端单元。
当机车被设置为主控机车时,制动系统的性能不会受到重大影响,制动系统需要把主控机车的相关信息发送给RCS。当机车被设置为从控机车时,制动系统需要响应RCS发送的主控机车的指令,实现相应的功能,此时,制动系统进入有限状态机模型的无线同步控制状态,根据主控机车的指令对本车的均衡压力和列车管压力进行控制。软件流程如图6所示。
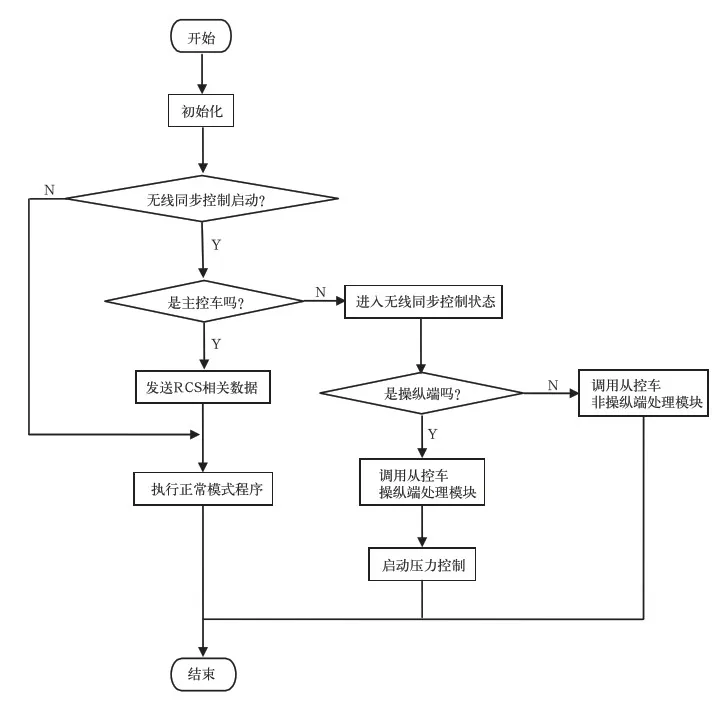
图6 自动制动功能模块流程图
3.3.3 单独制动功能模块的设计
单独制动功能与自动制动功能相似,当机车被设置为从控机车时,制动系统需根据主控机车的目标压力值设置本车的目标压力,不同之处在于单独制动由单独制动电空模块控制,BCU需要把目标压力值传输给单独制动电空模块。
此外,BCU必须把有限状态机模型的无线同步控制状态作为一个标志位,发送给单独制动电空模块,使其对正常工作模式和无线同步控制模式加以区分。单独制动功能模块的流程如图7所示。
3.3.4 通信丢失的处理
由于重载运输线路的地形条件复杂、运行环境恶劣,无线通信信号不可避免地存在信号弱甚至中断的情况,因此无线同步控制的设计必须考虑无线电通信丢失的工况,以实现各种工况下的列车安全导向。相应地,制动系统也必须在这种工况下采取合理而有效的保护措施,确保列车的运行安全。基于长大列车的运行经验,为了避免列车冲动,列车运行中应尽量避免施加紧急制动[3],因此在通信丢失的情况下,制动系统不施加紧急制动,而是施加最大常用减压量的惩罚制动。
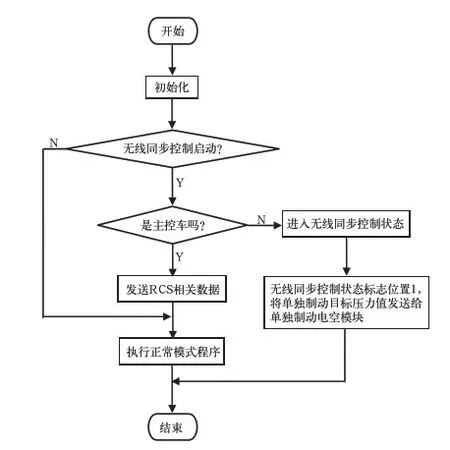
图7 单独制动功能模块流程图
制动系统根据RCS与BCU之间传输的生命信号判断通信状况。正常情况下,生命信号应随软件运行周期持续变化,如果生命信号维持一定时间不变,则判定为通信丢失。
对于主控机车,当BCU检测到RCS发送的信息丢失,并持续超过通信丢失判定时间5 s时,BCU会产生惩罚制动,并将惩罚制动状态位置1。
对于从控机车,当BCU检测到RCS发送的信息丢失,并持续超过通信丢失判定时间5 s时,制动系统无法再响应主控机车的指令。为了不对全列车的制动和缓解造成影响,制动系统会将执行机构司机制动阀隔离,不再对均衡风缸及列车管压力进行控制。待通讯恢复后,再将司机制动阀重新投入,恢复响应主控机车指令,确保整列车制动指令一致。通信丢失模块的流程如图8所示。
3.3.5 故障诊断模块的设计
制动系统具有完善的故障诊断功能,能够对系统的各个部件包括气动阀、压力传感器、压力开关和电磁阀等进行监测和诊断,并提供故障提示信息。当重要部件发生故障时,制动系统会自动产生惩罚制动,使列车降速甚至停车。但是,在无线同步控制模式下,从控机车自动产生惩罚制动会产生列车冲动,危机行车安全。因此,无线同步控制模式下,从控车的故障诊断必须做降级处理,将自动产生惩罚制动的功能取消,只提供故障提示信息。

图8 通信丢失模块流程图
4 现车调试和试验
2014年3月大同电力机车有限公司神华八轴机车的无线同步控制设备供应商、TCMS供应商和法维莱公司技术人员在神朔机务段进行了机车分布式组合列车无线同步控制的联合调试,包括静态测试和动态运行测试。在1+1组合方式的静态试验中,制动测试结果如下:

表2 1+1组合方式制动测试结果 kPa
调试和试验过程中,在BCU软件方面,主要解决了以下关键技术问题。
(1) 无线同步控制状态的判断条件和逻辑顺序
无线同步控制状态的判断主要依据两个方面的条件,一个是RCS发送给BCU的MVB数据中的相关标志位,另一个是制动系统的主从控塞门信号。只有两个方面的条件都满足,制动系统才会进入到有限状态机模型的无线同步控制状态。前者条件优先于后者,只有前者条件满足了,才有必要进行后者条件的判断。从上位机的BCU监控程序可以监测到制动系统是否正确地进入到无线同步控制状态,见图9和图10。
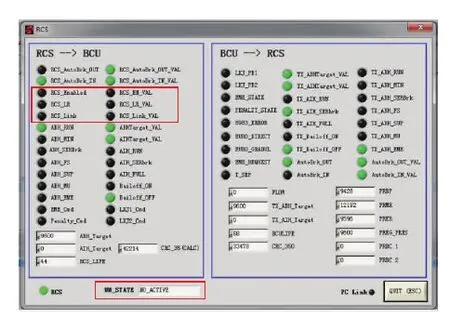
图9 BCU监控软件非无线同步控制状态截图
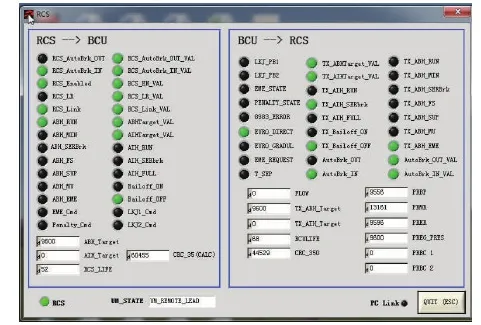
图10 BCU监控软件无线同步控制状态截图
(2) 通信丢失功能的调试
主控机车制动系统判断出通信丢失时,执行惩罚制动。从控机车通信丢失功能的关键在于能否正确地切除执行机构司机制动阀,并在故障消除后自动恢复,使其重新投入。从控机车通信丢失时的BCU监控截图见图11。

图11 BCU监控软件从控机车通信丢失截图
现车调试的结果表明,无线同步控制模式下,从控机车能够及时响应主控机车的指令,主、从控机车制动与缓解作用基本保持一致。BCU软件的架构逻辑清晰,设计合理。制动系统能够正确进行无线同步控制模式和非无线同步控制模式之间的转换,满足功能要求。
5 结束语
本文是利用计算机科学的有限状态机模型理论进行制动系统控制软件无线同步控制功能设计的实践应用。在分析无线同步控制功能需求和制动系统软件结构的基础上,对如何重建软件功能模块结构和故障诊断安全导向等进行研究。分析、研究和试验表明,在以状态机模型为基础的制动控制软件中,每一种状态的严格定义、状态判断条件的确认、状态优先级的排序和功能模块的划分对软件设计及其功能实现至关重要,对制动机的可靠性和安全性有重要影响,是软件结构设计中需深入分析和谨慎决定的因素。相应开发的制动系统控制软件已进行应用测试,静态试验和动态试验结果良好,满足系统的无线同步控制功能要求。
[1] 耿志修.大秦铁路重载运输技术 [M].北京:中国铁道出版社,2009.
[2] 李 蔚,陈特放,李 辉,等.重载组合列车分布机车重联控制系统无线传输同步性研究 [J].中国铁道科学,2011,32 (6):102-106.
[3] 高春明,冀 彬,张 波,等.大秦线重载组合列车的LOCOTROL技术应用研究 [J].电力机车与城轨车辆,2006,29 (6):5-7,41.
[4] 郭其一,陈琳芝,黄世泽,等.基于无线通信的重载列车同步控制技术研究 [J].同济大学学报(自然科学版),2013, 41 (2):223-227, 246.
[5] Hoperoft J E, Motwani R, Ullman J D. Introduction to Automata Theory, Languages, and Computation [M].Beijing: China Machine Press, 2008.
[6] 黄志强,苏 颖.有限自动机在自动控制软件设计中的应用 [J].华北电力大学学报,2002, 29 (1):49-51.
Software Design of Wireless Synchronous Control for Shenhua 8-axle Locomotive Brake System
ZHANGWei
(Faiveley Transport Systems Technology (Beijing) Co.,Ltd., Beijing 100015, China)
The unified management and synchronous control of remote locomotives via wireless synchronous control system for the configuration of locomotives distributed with a combined train is a key technology in railway heavy-haul transportation. Taken Faiveley brake system of Shenhua 8-axle electric locomotive as the object of research, from the view of brake technology and software design, the software development of the brake system radio control function is studied. Finite state machine model is used. The elements of adding wireless synchronous control function in the brake system software is analyzed. Suggestions and implementation of software architecture are proposed. The results show that for the brake control software based on finite state machine model, division of function modules, design and adjustment of finite state machine structure are critical of software design and functional implementation. It has important influence on the reliability and security of brake system.
brake system; wireless synchronous control; software; architecture
女,工程师(
2016-04-19)
1008-7842 (2016) 05-0051-06
U260.35+9
A
10.3969/j.issn.1008-7842.2016.05.11
猜你喜欢
北京航空航天大学学报(2019年9期)2019-10-26 02:30:04
制造技术与机床(2017年2期)2017-05-04 04:17:24
软件导刊(2016年9期)2016-11-07 21:35:42
通信电源技术(2016年5期)2016-03-22 01:09:49
石油知识(2016年2期)2016-02-28 16:20:16
自动化仪表(2015年11期)2015-04-01 01:02:40
舰船科学技术(2015年8期)2015-02-27 15:38:46
航天返回与遥感(2014年5期)2014-07-31 17:57:09
郑州大学学报(理学版)(2013年2期)2013-03-11 20:30:26
黑龙江科学(2011年2期)2011-03-14 00:39:36